JP7468018B2 - Thrust generating device - Google Patents
Thrust generating device Download PDFInfo
- Publication number
- JP7468018B2 JP7468018B2 JP2020047048A JP2020047048A JP7468018B2 JP 7468018 B2 JP7468018 B2 JP 7468018B2 JP 2020047048 A JP2020047048 A JP 2020047048A JP 2020047048 A JP2020047048 A JP 2020047048A JP 7468018 B2 JP7468018 B2 JP 7468018B2
- Authority
- JP
- Japan
- Prior art keywords
- linear
- pitch angle
- shaft
- thrust generating
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000033001 locomotion Effects 0.000 claims description 128
- 230000005540 biological transmission Effects 0.000 claims description 76
- 230000008859 change Effects 0.000 claims description 63
- 238000006243 chemical reaction Methods 0.000 claims description 61
- 230000007246 mechanism Effects 0.000 claims description 19
- 239000000463 material Substances 0.000 description 9
- 229910000737 Duralumin Inorganic materials 0.000 description 5
- 230000004308 accommodation Effects 0.000 description 4
- 230000004044 response Effects 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 229910000975 Carbon steel Inorganic materials 0.000 description 1
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 239000010962 carbon steel Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000002783 friction material Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images











Landscapes
- Transmission Devices (AREA)
Description
本発明は、推力発生装置に関する。 The present invention relates to a thrust generating device.
油圧を用いることなく、電動でプロペラ(回転翼)のピッチを変更する技術としては、例えば、特許文献1に開示がある。この技術では、回転主軸が中空状に形成され、この回転主軸内に操作ロッドが軸線方向にのみ移動可能に同心状に配設され、その操作ロッドの下端に固着されたアームが、リンクおよびレバー機構を介して羽根の各支持軸に連結されている。そして、操作ロッドを軸線方向に往復移動させることによって、リンクおよびレバー機構を介して各羽根の取付角度が変化される。
A technology for electrically changing the pitch of a propeller (rotor blades) without using hydraulics is disclosed, for example, in
マルチコプター、飛行機、回転翼機、飛行可能な自動車などの飛行可能な機体では安全性の観点から高い信頼性が求められる。 High reliability is required for safety reasons for flyable aircraft such as multicopters, airplanes, rotorcraft, and flyable automobiles.
そこで、本発明は、高い信頼性を有する推力発生装置を提供することを目的とする。 The present invention aims to provide a highly reliable thrust generating device.
本発明のある態様に係る推力発生装置は、複数の回転翼を回転させて推力を発生させる推力発生モータと、前記回転翼のピッチ角を変更する複数のピッチ角変更モータと、前記複数のピッチ角変更モータにそれぞれ連結された複数の回転伝達部と、単一の直動軸と運動変換機構を有し、前記運動変換機構が複数の回転伝達部と前記直動軸に連結可能であって、少なくとも1つの回転伝達部の回転を前記直動軸の直線運動に変換する、第1の運動変換部と、前記直動軸の直線運動を回転運動に変換して、前記回転翼のピッチ角を変更する第2の運動変換部とを備える。
この態様においては、第1の運動変換部が複数のピッチ角変更モータの回転運動を単一の直動軸の直線運動に変換可能であり、いずれかのピッチ角変更モータが故障した場合、他のピッチ角変更モータの回転運動を用いて、回転翼のピッチ角を変更することが可能である。したがって、推力発生装置は高い信頼性を有する。
A thrust generating device according to one aspect of the present invention comprises a thrust generating motor that generates thrust by rotating a plurality of rotors, a plurality of pitch angle changing motors that change the pitch angle of the rotors, a plurality of rotation transmission units respectively connected to the plurality of pitch angle changing motors, a first motion conversion unit having a single linear shaft and a motion conversion mechanism, the motion conversion mechanism being connectable to the plurality of rotation transmission units and the linear shaft and converting rotation of at least one rotation transmission unit into linear motion of the linear shaft, and a second motion conversion unit that converts the linear motion of the linear shaft into rotational motion to change the pitch angle of the rotors.
In this embodiment, the first motion conversion unit can convert the rotational motion of the multiple pitch angle change motors into linear motion of a single linear shaft, and if any of the pitch angle change motors fails, it is possible to change the pitch angle of the rotor using the rotational motion of the other pitch angle change motors, thus providing a thrust generating system with high reliability.
好ましくは、前記第1の運動変換部の前記運動変換機構は、前記複数の回転伝達部に常時連結されており、前記複数の回転伝達部の回転を前記直動軸の直線運動に変換可能である。
この場合には、いずれかのピッチ角変更モータが故障した場合、即座に他のピッチ角変更モータによって、回転翼のピッチ角を変更することが可能である。
Preferably, the motion converting mechanism of the first motion converting part is constantly connected to the plurality of rotation transmitting parts and is capable of converting rotation of the plurality of rotation transmitting parts into linear motion of the linear motion shaft.
In this case, if any of the pitch angle changing motors fails, it is possible to immediately change the pitch angle of the rotor blades by the other pitch angle changing motor.
好ましくは、前記ピッチ角変更モータは、前記推力発生モータの内部に配置され、前記推力発生モータの静止部材に固定されている。
この場合には、推力発生装置の大型化を抑制することができる。
Preferably, the pitch angle changing motor is disposed inside the thrust generating motor and fixed to a stationary member of the thrust generating motor.
In this case, it is possible to prevent the thrust generating device from becoming large.
以下、添付の図面を参照しながら、本発明の実施形態を詳細に説明する。以下の実施形態は本発明を限定するものではなく、実施形態で説明されている特徴の組み合わせの全てが本発明の構成に必須のものとは限らない。実施形態の構成は、本発明が適用される装置の仕様や各種条件(使用条件、使用環境等)によって適宜修正または変更され得る。本発明の技術的範囲は、特許請求の範囲によって確定され、以下の個別の実施形態によって限定されない。図面の縮尺は必ずしも正確ではなく、一部の特徴は誇張または省略されることもある。 The following describes in detail the embodiments of the present invention with reference to the accompanying drawings. The following embodiments do not limit the present invention, and not all of the combinations of features described in the embodiments are necessarily essential to the configuration of the present invention. The configuration of the embodiments may be modified or changed as appropriate depending on the specifications of the device to which the present invention is applied and various conditions (conditions of use, environment of use, etc.). The technical scope of the present invention is determined by the claims and is not limited by the individual embodiments below. The drawings are not necessarily drawn to scale, and some features may be exaggerated or omitted.
以下の説明では、推力発生装置で駆動される回転翼が3枚の場合を例にとるが、推力発生装置で駆動される回転翼は、必ずしも3枚に限定されることなく、N(Nは正の整数)枚であればよい。 In the following explanation, we will use an example in which the rotor driven by the thrust generating device has three blades, but the number of blades driven by the thrust generating device is not necessarily limited to three, and may be N (N is a positive integer).
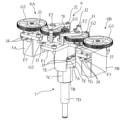
図1は、回転翼が取り付けられた実施形態に係る推力発生装置を示す斜視図である。図2および図3は、回転翼が取り付けられた実施形態に係る推力発生装置を示す側面図であり、回転翼のピッチ角が異なる。 Figure 1 is a perspective view showing a thrust generating device according to an embodiment in which rotors are attached. Figures 2 and 3 are side views showing thrust generating devices according to an embodiment in which rotors are attached, with the rotors having different pitch angles.
図1から図3に示すように、推力発生装置1は、複数の回転翼H1~H3を有するロータまたはプロペラRを回転させる。プロペラRは推力発生装置1の真下に配置されている。プロペラRは、グリップP1~P3を有し、グリップP1~P3は、推力発生装置1から水平方向に放射状に延びるように回転翼H1~H3を支持する。
As shown in Figures 1 to 3, the thrust generating
推力発生装置1は、上方の装着部1Aを介して飛翔体の機体に装着される。推力発生装置1が装着された飛翔体は、例えば、モータで飛行するマルチコプター、飛行機、回転翼機および飛行機能を備える自動車などの飛行可能な機体または車体である。図示しないが、飛翔体の機体には、プロペラRが取り付けられた複数の推力発生装置1が装着されてよい。
The
推力発生装置1は、推力発生モータ2、2つのピッチ角変更モータ5A,5B、および運動伝達ユニット6を備える。推力発生モータ2は、プロペラRを回転させて、飛翔体に与えられる推力を発生させる。2つのピッチ角変更モータ5A,5Bの各々は、回転翼H1~H3のピッチ角θ1~θ3を変更する。回転翼H1~H3のピッチ角θ1~θ3を変更することにより、飛翔体に与えられる推力を変化させることができる。運動伝達ユニット6は、ピッチ角変更モータ5A,5Bの回転運動を回転翼H1~H3に伝達する。
The
図4および図5は、推力発生装置1の分解斜視図である。図6は推力発生装置1の平面図であり、図7は図6のVII-VII線矢視断面図である。図4から図7に示すように、推力発生モータ2は、ステータ2A、ロータ2Bおよびフレーム2Cを備える。ロータ2Bは、径方向内側にロータ軸4および中空部3A,3B,3Cを備える。
Figures 4 and 5 are exploded perspective views of the thrust generating
ステータ2Aは、電磁鋼鈑と巻線により構成され、ロータ2Bの外側に位置する。ステータ2Aは、ステータ2Aの外側に配置されたフレーム2Cの円環部に固定されている。推力発生装置1の装着部1Aは、フレーム2Cの中央に設けることができる。装着部1Aは開口1Bを備え、開口1Bには運動伝達ユニット6が挿入される。装着部1Aは、放射状に延びる複数のスポーク1Cを介して円環部に連結されている。フレーム2Cには内側円筒部1Dが形成されており、内側円筒部1Dは軸受U1を介してロータ軸4を回転自在に支持する。円環部、装着部1A、スポーク1Cおよび内側円筒部1Dを含むフレーム2Cは、例えば、ジュラルミンなどの合金の切削加工で形成することができる。
The
推力発生モータ2のロータ2Bは、放射状に延びる複数のスポーク2Dを介してロータ軸4に連結されている。ロータ2Bは、中心軸線S0(図2および図3参照)を中心としてロータ軸4とともに回転する。ロータ2Bとロータ軸4は、軸受U1を介して、フレーム2Cに支持されている。
The
中空部3A,3Bは、ロータ2Bとロータ軸4の間に設けられている。中空部3A,3Bには、ピッチ角変更モータ5A,5Bがそれぞれ配置されている。ピッチ角変更モータ5A,5Bはフレーム2Cに固定されている。但し、理解の容易のため、図4および図5では、ピッチ角変更モータ5Bの図示が省略されている。
The
中空部3Cは、ロータ軸4の中心孔であり、ロータ軸4の軸線方向に沿って延びている。中空部3Cには、運動伝達ユニット6の一部が挿入されている。
The
推力発生モータ2のロータ軸4の下端面には、中空円筒であるエクステンション9が固定され、エクステンション9は、ロータRのハブ10に固定されている。したがって、ハブ10は、中心軸線S0周りに回転可能な状態でフレーム2Cに支持される。ハブ10には、回転翼H1~H3を支持するグリップP1~P3が取り付けられている。このようにして、推力発生モータ2は、回転翼H1~H3を有するプロペラRを回転させる。すなわち、推力発生モータ2が動作して、ロータ2Bが回転すると、ロータ軸4が回転し、中心軸線S0を中心として回転翼H1~H3が回転する。回転翼H1~H3の回転に伴って、飛翔体に与えられる推力が発生する。
A hollow
エクステンション9は、推力発生装置1の軸線方向において、推力発生モータ2と回転翼H1~H3との間の間隔を保つためのスペーサであって、回転翼H1~H3が推力発生モータ2に衝突するのを防止する。エクステンション9の材料は、例えば、ジュラルミンである。
The
回転翼H1~H3のピッチ角を変更するピッチ角変更モータ5A,5Bは、推力発生モータ2のフレーム2Cに固定されており、推力発生モータ2の内部、具体的には、中空部3A,3Bにそれぞれ配置されている。ピッチ角変更モータ5A,5Bの回転軸は、推力発生モータ2のロータ軸4と同様に鉛直方向に延びる。すなわち、ピッチ角変更モータ5A,5Bの回転軸とロータ軸4は平行な異なる軸である。
Pitch
次に、ピッチ角変更モータ5A,5Bの回転運動を回転翼H1~H3に伝達する運動伝達ユニット6を説明する。運動伝達ユニット6は、回転伝達部6A,6B、回転直動変換部7、および直動回転変換部8を備える。
Next, we will explain the
回転伝達部6Aは、ピッチ角変更モータ5Aの回転軸の回転を回転直動変換部7のボールねじ軸7Fに伝達する。回転伝達部6Bは、ピッチ角変更モータ5Bの回転軸の回転を回転直動変換部7のボールねじ軸7Fに伝達する。ボールねじ軸7Fは、推力発生装置1の中心軸線S0に沿って鉛直方向に延び、ロータ軸4の中心孔である中空部3C内に配置されている。したがって、回転伝達部6Aはピッチ角変更モータ5Aの回転運動を中心軸線S0上の軸に伝達し、回転伝達部6Bはピッチ角変更モータ5Bの回転運動を中心軸線S0上の軸に伝達する。各回転伝達部は、ピッチ角変更モータの回転軸の回転に伴って回転する回転部材を有する。回転伝達部6A,6Bはフレーム2Cに固定される。
The
回転直動変換部(第1の運動変換部)7は、推力発生装置1の中心軸線S0に沿って鉛直方向に延びる直動伝達軸(直動軸)7Dと、回転伝達部6A,6Bの回転を直動伝達軸7Dの直線運動に変換する運動変換機構を有する。回転直動変換部7の運動変換機構は、回転伝達部6A,6Bと直動伝達軸7Dに連結されている。この運動変換機構は、直動伝達軸7Dの上方に同軸に配置されたボールねじ軸7Fを有する。回転直動変換部7の上部は、推力発生モータ2内に収容されているが、回転直動変換部7の下部は、推力発生モータ2から下方に突出する。回転直動変換部7は、フレーム2Cに固定される。
The rotary-linear motion conversion unit (first motion conversion unit) 7 has a linear motion transmission shaft (linear motion shaft) 7D that extends vertically along the central axis S0 of the
直動回転変換部(第2の運動変換部)8は、回転直動変換部7の直動伝達軸7Dの直線運動を回転運動に変換して、回転翼H1~H3のピッチ角を変更する。直動回転変換部8は、推力発生用モータ2の下方に位置する。
The linear motion-rotation conversion unit (second motion conversion unit) 8 converts the linear motion of the linear
ピッチ角変更モータ5A,5B、回転伝達部6A,6Bおよび回転直動変換部7は、推力発生モータ2のフレーム(静止部材)2Cに固定される。このため、ロータ軸4が回転しても、ピッチ角変更モータ5A,5B、回転伝達部6A,6Bおよび回転直動変換部7は、ロータ軸4の周りに回転しない。一方、直動回転変換部8は、ロータ軸4に支持される。このため、直動回転変換部8は、ロータ軸4の回転に伴ってロータ軸4の周りに回転する。
The pitch
図8~図11に示すように、回転直動変換部7のボールねじ軸7Fの上端には、歯車G1が固定されている。回転伝達部6Aは、歯車G2,G3を有しており、歯車G3はピッチ角変更モータ5Aの回転軸に固定され、歯車G2は歯車G3と歯車G1に噛み合わせられている。回転伝達部6Bも歯車G2,G3を有しており、歯車G3はピッチ角変更モータ5Bの回転軸に固定され、歯車G2は歯車G3と歯車G1に噛み合わせられている。したがって、回転伝達部6Aにおいて、歯車G3,G2はピッチ角変更モータ5Aの回転運動を歯車G1に固定されたボールねじ軸7Fに伝達することが可能であり、回転伝達部6Bにおいて、歯車G3,G2はピッチ角変更モータ5Bの回転運動を歯車G1に固定されたボールねじ軸7Fに伝達することが可能である。歯車G1~G3の材料は、例えば、炭素鋼である。
As shown in Figures 8 to 11, a gear G1 is fixed to the upper end of the
回転直動変換部7は支持部材F1に支持されている。図4、図6および図7に示すように、支持部材F1は、推力発生モータ2のフレーム2Cの装着部1Aの開口1Bの中に配置されている。支持部材F1は、例えば4つのボルトJ1(図8~図11参照)によってフレーム2Cに支持されている。ボルトJ1は、例えば、支持部材F1の四隅に配置することができる。また、推力発生モータ2の中空部3A,3Bには、2つの支持部材F3がそれぞれ配置されている。これらの支持部材F3もボルトJ3(図8、図9、図11参照)によってフレーム2Cに支持されている。中空部3A内の支持部材F3にはボルトJ4によってピッチ角変更モータ5Aが固定され、中空部3B内の支持部材F3にはボルトJ4によってピッチ角変更モータ5Bが固定されている(図8~図11参照)。
The rotary-
図8~図11に示すように、支持部材F1には2つの支持部材F2がボルトJ2によって支持されており、支持部材F1と一方の支持部材F2は、回転伝達部6Aの歯車G2を回転可能に支持し、支持部材F1と他方の支持部材F2は、回転伝達部6Bの歯車G2を回転可能に支持する。支持部材F1~F3の材料は、例えば、アルミニウム合金である。
As shown in Figures 8 to 11, two support members F2 are supported by bolts J2 on the support member F1, and the support member F1 and one of the support members F2 rotatably support the gear G2 of the
この実施形態では、回転伝達部6Aにおいて、歯車がピッチ角変更モータ5Aの回転運動を回転直動変換部7のボールねじ軸7Fに伝達し、回転伝達部6Bにおいて、歯車がピッチ角変更モータ5Bの回転運動を回転直動変換部7のボールねじ軸7Fに伝達する。しかし、各回転伝達部は、ベルト・プーリ機構またはチェーン・スプロケットを有してもよい。具体的には、ボールねじ軸7Fに複数のプーリを固定し、1つのプーリとピッチ角変更モータ5Aの回転軸に固定されたプーリにベルトを巻き、他の1つのプーリとピッチ角変更モータ5Bの回転軸に固定されたプーリにベルトを巻いてもよい。ベルトとしてタイミングベルトを使用してもよい。ボールねじ軸7Fに複数のスプロケットを固定し、1つのスプロケットとピッチ角変更モータ5Aの回転軸に固定されたスプロケットにチェーンを巻き、他の1つのスプロケットとピッチ角変更モータ5Bの回転軸に固定されたスプロケットにチェーンを巻いてもよい。
In this embodiment, in the
この実施形態では、回転直動変換部7は、運動変換機構としてボールねじを用いて、ボールねじ軸7Fの回転運動を直動伝達軸7Dの直線運動に変換する。運動変換機構は、ボールねじ軸7F、ボールねじナット7Gおよび一対の直動案内部7Eを備える。但し、ボールねじの代わりに、すべりねじ、またはその他の送りねじを用いてもよい。この実施形態では、回転直動変換部7の運動変換機構としてボールねじを用いることにより、すべりねじを用いた場合に比べて、ピッチ角変更に要する駆動トルクを低減することができ、ピッチ角変更モータ5A,5Bの省電力化を図ることができる。
In this embodiment, the rotary-
ボールねじ軸7Fは、鉛直方向に延びている。ボールねじ軸7Fは、図7に示すように、支持部材F1に固定された軸受U2によって回転可能に支持されており、歯車G1の回転に伴ってボールねじ軸7Fの長手軸線を中心にして回転する。
The
図9および図10に示すように、ボールねじナット7Gは、ボールねじ軸7Fに噛み合わせられている。ボールねじナット7Gも鉛直方向に延びており、ボールねじナット7Gの下方に配置された鉛直方向に延びる直動伝達軸7Dに固定されている。
As shown in Figures 9 and 10, the
図9から図11に示すように、ボールねじナット7Gと直動伝達軸7Dは、支持部材F1から突出する一対の平行な長尺な板壁である直動案内部7Eに挟まれており、一対の直動案内部7Eによって回転しないように規制されている。ボールねじ軸7Fの回転に伴って、ボールねじナット7Gと直動伝達軸7Dは、ボールねじ軸7Fの軸線方向に沿って鉛直方向に直線運動する。直動案内部7Eは、ボールねじナット7Gと直動伝達軸7Dの直線運動を許容する。換言すれば、直動案内部7Eは、ボールねじナット7Gと直動伝達軸7Dを直線運動するよう案内する。したがって、歯車G1とともにボールねじ軸7Fが回転すると、直動案内部7Eに案内されて、ボールねじナット7Gと直動伝達軸7Dが鉛直方向に直線運動する。直動案内部7Eは支持部材F1と一体的に設けることができる。
As shown in Figures 9 to 11, the
図9および図10に示すように、直動伝達軸7Dの上部には、鉛直方向に延びる空洞が形成されており、この空洞に、ボールねじ軸7Fに噛み合わせられたボールねじナット7Gが挿入されている。
As shown in Figures 9 and 10, a vertically extending cavity is formed at the top of the linear
図10および図11に示すように、直動伝達軸7Dの上部の外周面には、2つの被案内平坦面7Cが形成されている。2つの被案内平坦面7Cは、互いに平行であり、2つの直動案内部7Eに対してそれぞれ対向する。
As shown in Figures 10 and 11, two guided
図10に示すように、被案内平坦面7Cの各々には凹部が形成され、凹部には低摩擦材料、例えばフッ素樹脂から形成された摺動部材7Hが嵌め込まれている。摺動部材7Hの一部は凹部から突出し、直動案内部7Eに摺動可能に接触する。したがって、ボールねじナット7Gと直動伝達軸7Dが鉛直方向に直線運動する時、摺動部材7Hは直動案内部7Eとの摩擦を減少させる。摺動部材7Hは凹部に接着剤などで固定してもよい。
As shown in FIG. 10, a recess is formed in each of the guided
図9から図11に示すように、ボールねじナット7Gの上端にはフランジ7Aが形成され、直動伝達軸7Dの上端にもフランジ7Bが形成されている。フランジ7A,7Bは、円筒を平行な二平面で切り取った形状であり、フランジ7A,7Bの円弧状の突出部分は、一対の直動案内部7Eの間から露出している。フランジ7A,7BはボルトJ5によって固定されており、したがって直動伝達軸7Dはボールねじナット7Gに固定されている。
As shown in Figures 9 to 11, a
一方、図10に示すように、フランジ7A,7Bの平面部分は、2つの直動案内部7Eに対してそれぞれ対向する。フランジ7Aの平面部分は、被案内平坦面7Cと面一である。フランジ7Bの平面部分は、被案内平坦面7Cの一部であり、ここに形成された凹部に摺動部材7Hが嵌め込まれている。このように、フランジ7A,7Bに平面部分を設けることにより、一対の直動案内部7Eの外径を小さくすることができ、ロータ軸4の径の増大を抑制しつつ、回転直動変換部7をロータ軸4内に収納することが可能である。
On the other hand, as shown in FIG. 10, the flat surfaces of the
図7に示すように、直動伝達軸7Dの上部を含む回転直動変換部7の大部分は推力発生モータ2の内部に配置されている一方、直動伝達軸7Dの下部は中空円筒であるエクステンション9の内部空間を貫通し、さらにプロペラRのハブ10の内部に到達する。
As shown in FIG. 7, most of the rotary-
直動伝達軸7Dの下部は、回転翼H1~H3のピッチ角を変更するために、回転直動変換部7の直線運動を回転運動に変換する直動回転変換部8に連結されている。この実施形態では、直動回転変換部8は、運動変換機構としてラックピニオンを用いて、回転直動変換部7の直動伝達軸7Dの直線運動を回転運動に変換する。
The lower part of the linear
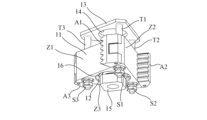
図4および図5に示すように、直動回転変換部8は、直動体11、ラックA1~A3、ケース21、支持軸M1~M3、軸受E1~E3、シャフトアダプタD1~D3およびピニオンB1~B3を備える。
As shown in Figures 4 and 5, the linear motion
直動体11は正三角柱の形状を有し、その中央には空洞が形成されている。図7に示すように、直動伝達軸7Dの下端は、軸受U3の内輪に嵌め込まれており、軸受U3の外輪は直動体11の空洞に嵌め込まれている。したがって、直動体11は直動伝達軸7Dの周りを回転可能であり、直動伝達軸7Dとともに鉛直方向に直線運動する。軸受U3としては、例えば、複列アンギュラ玉軸受を用いることができる。
The
ラックA1~A3は、直動体11の3つのコーナーに固定されており、直動体11とともに直線運動する。ラックA1~A3は、それぞれピニオンB1~B3と噛み合わせられ、ピニオンB1~B3は、直動体11とラックA1~A3の直線運動に伴って、同時に回転運動させられる。
The racks A1 to A3 are fixed to three corners of the
支持軸M1~M3は、プロペラRの回転翼H1~H3を支持するグリップP1~P3の延長線上にそれぞれ配置されている。すなわち、支持軸M1~M3は、推力発生装置1から水平方向に放射状に延びるようにグリップP1~P3をそれぞれ支持する。グリップP1と支持軸M1は一体的に設け、グリップP2と支持軸M2は一体的に設け、グリップP3と支持軸M3は一体的に設けることができる。グリップP1~P3と支持軸M1~M3の材料は、例えば、ジュラルミンである。但し、グリップP1~P3と支持軸M1~M3の耐久性を増大させるため、グリップP1~P3と支持軸M1~M3の材料として、例えば、チタンを用いてもよい。
The support shafts M1 to M3 are arranged on the extensions of the grips P1 to P3 that support the rotors H1 to H3 of the propeller R. That is, the support shafts M1 to M3 support the grips P1 to P3 so as to extend horizontally radially from the
支持軸M1~M3は、ケース21に固定された軸受E1~E3によって、支持軸M1~M3の軸回りに回転可能に支持されている。E1~E3としては、例えば、複列アンギュラ玉軸受を用いることができる。
The support shafts M1 to M3 are supported by bearings E1 to E3 fixed to the
ピニオンB1~B3は、それぞれ支持軸M1~M3の先端に固定されている。したがって、直動体11とラックA1~A3の直線運動に伴って、ピニオンB1~B3が回転すると、支持軸M1~M3もグリップP1~P3とともに回転する。ピニオンB1~B3およびラックA1~A3の材料は、例えば、クロムモリブデン鋼である。
The pinions B1 to B3 are fixed to the tips of the support shafts M1 to M3, respectively. Therefore, when the pinions B1 to B3 rotate in accordance with the linear motion of the
ケース21は、プロペラRのハブ10の一部である。ケース21は、直動体11、ラックA1~A3、支持軸M1~M3、軸受E1~E3、シャフトアダプタD1~D3およびピニオンB1~B3を収容する。したがって、ケース21は、直動回転変換部8のケースであるとみなすこともできる。
The
ケース21の上部は、中空円筒であるエクステンション9の下端に固定され、エクステンション9の上端は、推力発生モータ2のロータ軸4に固定されている。したがって、ケース21はロータ2Bとロータ軸4とともに、推力発生装置1の軸線周りに回転する。
The upper part of the
ケース21に固定された軸受E1~E3は、推力発生装置1の軸線周りの回転時に、回転翼H1~H3にかかる遠心力に対抗して支持軸M1~M3を支持することができる。
The bearings E1 to E3 fixed to the
シャフトアダプタD1~D3は、それぞれ支持軸M1~M3の外側、かつ軸受E1~E3の内側に配置され、それぞれ支持軸M1~M3に支持される。各シャフトアダプタD1~D3の内周面は、径が変化する支持軸M1~M3の外周面にフィットするように形成され、各シャフトアダプタD1~D3の外周面は、円柱形の軸受E1~E3の内周面にフィットするように形成される。シャフトアダプタD1~D3により、各支持軸M1~M3の径の変化に対応しつつ、軸受E1~E3は支持軸M1~M3を支持することができる。ケース21およびシャフトアダプタD1~D3の材料は、例えば、ジュラルミンである。
The shaft adapters D1 to D3 are disposed outside the support shafts M1 to M3 and inside the bearings E1 to E3, respectively, and are supported by the support shafts M1 to M3. The inner circumferential surface of each shaft adapter D1 to D3 is formed to fit the outer circumferential surface of the support shafts M1 to M3, which vary in diameter, and the outer circumferential surface of each shaft adapter D1 to D3 is formed to fit the inner circumferential surface of the cylindrical bearings E1 to E3. The shaft adapters D1 to D3 allow the bearings E1 to E3 to support the support shafts M1 to M3 while accommodating changes in the diameter of each support shaft M1 to M3. The
ケース21に収容された、直動体11、ラックA1~A3、支持軸M1~M3、軸受E1~E3、シャフトアダプタD1~D3およびピニオンB1~B3は、ケース21とともに、推力発生装置1の軸線周りに回転する。上記の通り、直動体11は軸受U3の外輪に固定され、軸受U3の内輪に固定された直動伝達軸7Dとは独立して、推力発生装置1の軸線周りに回転することが可能である。図7に示すように、軸受U3の内輪は、例えば、ナット15によって直動伝達軸7Dの下端に固定することができ、軸受U3の外輪は、例えば、C型留め輪16にて直動体11に固定することができる。
The
図12は、図2の回転翼のピッチ角に対応した直動体11の位置を示し、図13は、図3の回転翼のピッチ角に対応した直動体11の位置を示す。図12および図13に示すように、直動回転変換部8は、直動体11の直動方向の移動範囲を制限するため、ベース13、リフトガイドT1~T3およびナットS1~S3を備える。ベース13は、輪郭が直動体11の輪郭と同じ正三角形の板であり、ベース13の中央には、直動伝達軸7Dの下端が通過可能な貫通した開口14が形成されている。ベース13は、鉛直方向に延びる棒である互いに平行なリフトガイドT1~T3を支持する。リフトガイドT1~T3は、ベース13と一体的に設けることができる。
Figure 12 shows the position of the
正三角柱の形状を有する直動体11は、3つの側面Z1~Z3を有する。側面Z1~Z3には、ラックA1~A3がそれぞれ固定されている。直動体11の中央には、空洞12が形成され、空洞12には、軸受U3(図7参照)が配置されている。
The
直動体11の3つのコーナーには、開口V1~V3がそれぞれ形成されている。開口V1~V3には、ベース13に固定されたリフトガイドT1~T3がそれぞれ挿入される。リフトガイドT1~T3の下端には、ナットS1~S3がそれぞれ装着される。
Openings V1 to V3 are formed at the three corners of the
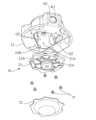
図14はハブ10の分解斜視図である。ハブ10は、ケース21、外蓋22および中蓋23を備える。ケース21は、収容部21A、開口21B、中空部Q1~Q3および開口K1~K3(図4および図5参照)を備える。
Figure 14 is an exploded perspective view of the
収容部21Aは、ケース21の中央に形成されており、ラックA1~A3が取り付けられた直動体11をベース13とともに収容する。収容部21Aは、例えば、ケース21内に設けられた中空部または凹部である。収容部21Aの平面形状は、ベース13の平面形状に対応し、ほぼ正三角形にすることができる。開口21Bは、開口21Bを通じて、収容部21AにラックA1~A3が取り付けられた直動体11とベース13を配備するために形成されている。
The accommodation section 21A is formed in the center of the
中空部Q1~Q3は、収容部21Aの外側に120度の角間隔をおいて配置され、収容部21Aに連通する。中空部Q1には、支持軸M1、ピニオンB1、軸受E1およびシャフトアダプタD1が配置され、中空部Q2には、支持軸M2、ピニオンB2、軸受E2およびシャフトアダプタD2が配置され、中空部Q3には、支持軸M3、ピニオンB3、軸受E3およびシャフトアダプタD3が配置される。これらの中空部Q1~Q3には、開口21Bと収容部21Aを通じて、ピニオンB1~B3、軸受E1~E3およびシャフトアダプタD1~D3を配備することが可能である。
The hollow sections Q1 to Q3 are arranged at angular intervals of 120 degrees outside the housing section 21A and communicate with the housing section 21A. The support shaft M1, pinion B1, bearing E1 and shaft adapter D1 are arranged in the hollow section Q1, the support shaft M2, pinion B2, bearing E2 and shaft adapter D2 are arranged in the hollow section Q2, and the support shaft M3, pinion B3, bearing E3 and shaft adapter D3 are arranged in the hollow section Q3. The pinions B1 to B3, bearings E1 to E3 and shaft adapters D1 to D3 can be arranged in these hollow sections Q1 to Q3 through the
開口K1~K3は、ケース21の外側面に120度の角間隔をおいて形成されており、それぞれ中空部Q1~Q3に連通する。支持軸M1~M3をそれぞれ開口K1~K3に挿入することにより、支持軸M1~M3を収容部21A内に配備することが可能である。
Openings K1 to K3 are formed on the outer surface of
中蓋23は、複数のボルトJ7によってケース21に固定される。さらに中蓋23をカバーする外蓋22が中蓋23に固定される。中蓋23の材料は、例えば、ジュラルミンであり、外蓋22の材料は、例えば、樹脂である。
The
中蓋23には、複数の貫通孔23Aが形成されている。リフトガイドT1~T3(図12および図13参照)の下端は、中蓋23の貫通孔23Aにそれぞれ挿入されて、中蓋23の外側に突出する。中蓋23の外側において、リフトガイドT1~T3の下端にはナットS1~S3が装着される。これにより、ケース21の収容部21Aに配置されたベース13をケース21の上壁に固定することができる。
The
上記の構成の下、ピッチ角変更モータ5A,5Bが回転すると、回転伝達部6Aにおいて、歯車G3,G2がピッチ角変更モータ5Aの回転運動を歯車G1に伝達し、回転伝達部6Bにおいて、歯車G3,G2がピッチ角変更モータ5Bの回転運動を回転直動変換部7の歯車G1に伝達する(図8~図11参照)。歯車G1は、回転直動変換部7のボールねじ軸7Fに固定されているので、ピッチ角変更モータ5A,5Bの回転運動はボールねじ軸7Fに伝達される。ボールねじ軸7Fが回転すると、ボールねじナット7Gと直動伝達軸7Dは、直動案内部7Eに案内されて、鉛直方向に直線運動する(図9~図11参照)。
When the pitch
直動伝達軸7Dの直線運動は、直動体11に伝達される。直動伝達軸7Dの直線運動に伴って、直動体11とともに直動体11に固定されたラックA1~A3が鉛直方向に直線運動する。直動体11とともにラックA1~A3が直線運動するとき、リフトガイドT1~T3は、直動体11を案内する(図12および図13参照)。直動体11の移動範囲は、ベース13およびナットS1~S3にて制限される。ラックA1~A3には、それぞれピニオンB1~B3が噛み合わせられており、ラックA1~A3が直線運動すると、支持軸M1~M3に固定されたピニオンB1~B3が同時に回転する(図4および図5参照)。したがって、ピニオンB1~B3の回転運動に伴って、支持軸M1~M3がそれぞれの軸線周りに回転する。支持軸M1~M3には、回転翼H1~H3を支持するグリップP1~P3が取り付けられており、支持軸M1~M3の回転運動は回転翼H1~H3に伝達される。したがって、回転翼H1~H3のピッチ角が同時に変更される。例えば、直動体11が図12の位置にあるときは、回転翼H1~H3のピッチ角が図2に示すように設定され、直動体11が図13の位置にあるときは、回転翼H1~H3のピッチ角が図3に示すように設定される。
The linear motion of the
推力発生装置1は、ピッチ角変更モータ5A,5Bの回転角ひいては回転翼H1~H3のピッチ角を変更することにより、飛翔体に与えられる推力を変化させることができる。ピッチ角の変更により推力を変化させることで、推力発生モータ2の回転数を変えて推力を変化させる方法に比べ、推力変化の応答速度を高めることができ、飛翔体の安定性を向上させることが可能である。また、回転翼H1~H3のピッチ角を変更することにより、飛翔体に与えられる推力を変更できるので、回転翼H1~H3を大きくする必要がなく、推力発生モータ2の回転数を過剰に増加させる必要もない。回転翼H1~H3を大きくする必要がないので、飛翔体の大型化および重量増を抑制することができる。また、推力発生モータ2の回転数の増加が抑制されるので、回転数に依存する騒音を抑制することができる。
The
また、推力発生装置1では、回転翼H1~H3のピッチ角を電動で変更することにより、油圧を用いる必要がなくなる。このため、油の給排を制御する油圧制御ユニットおよび回転体に対してオイルシールを行うための複雑な回転シール機構を設ける必要がなくなり、推力発生装置1の大型化を抑制することが可能となるとともに、推力発生装置1の維持および修理を容易にすることができる。
In addition, in the
この実施形態では、直動回転変換部8の運動変換機構として、ラックピニオンを用いることにより、ラックA1~A3の各々の長手方向を直動体11の直動方向に揃えることが可能であり、ピニオンB1~B3の各々を支持軸と同心に揃えることが可能である。このため、3個のラックピニオンの配置をコンパクトにまとめることができ、ハブ10の大型化を抑制しつつ、直動回転変換部8をハブ10内に収容することが可能である。
In this embodiment, by using a rack and pinion as the motion conversion mechanism of the linear motion
この実施形態では、2つのピッチ角変更モータ5A,5Bの回転運動を回転伝達部6A,6Bが単一の歯車G1に伝達し、回転直動変換部7がその回転運動を単一の直動伝達軸7Dの直線運動に変換可能である。このため、いずれかのピッチ角変更モータが故障した場合、他のピッチ角変更モータの回転運動を用いて、回転翼H1~H3のピッチ角を変更することが可能である。したがって、推力発生装置は高い信頼性を有する。
In this embodiment, the rotational motion of the two pitch
回転直動変換部7の運動機構は、2つのピッチ角変更モータ5A,5Bにそれぞれ連結された回転伝達部6A,6Bに常時連結されている。すなわち、回転直動変換部7のボールねじ軸7Fに固定された歯車G1は、回転伝達部6A,6Bの歯車G2に常時噛み合わせられ、2つのピッチ角変更モータ5A,5Bの回転に伴って回転可能な状態にある。したがって、いずれかのピッチ角変更モータ5A,5Bが故障した場合、即座に他のピッチ角変更モータ5A,5Bによって、回転翼H1~H3のピッチ角を変更することが可能である。
The motion mechanism of the rotary-
2つのピッチ角変更モータ5A,5Bが正常である場合、2つのピッチ角変更モータ5A,5Bを同じ回転角度となるよう駆動してもよい。あるいは、いずれかのピッチ角変更モータのみを駆動し、他のピッチ角変更モータを非駆動としてもよい。後者の場合、非駆動のピッチ角変更モータは、歯車G1によって従動回転させられる。
When the two pitch
いずれの場合も、ピッチ角変更モータ5A,5Bは、角度制御によって駆動されるのが好ましい。角度制御によれば、いずれかのピッチ角変更モータが故障した際に、自動的に他のピッチ角変更モータの負荷動力が増えるため、制御系を簡便に構成することが可能である。
In either case, it is preferable that the pitch
この実施形態では、ピッチ角変更モータ5A,5Bは、推力発生モータ2の内部に配置され、推力発生モータ2のフレーム2Cに固定されている。したがって、推力発生装置1の大型化を抑制することができる。
In this embodiment, the pitch
以上、本発明の好ましい実施形態を参照しながら本発明を図示して説明したが、当業者にとって特許請求の範囲に記載された発明の範囲から逸脱することなく、形式および詳細の変更が可能であることが理解されるであろう。このような変更、改変および修正は本発明の範囲に包含されるはずである。 Although the present invention has been shown and described with reference to preferred embodiments thereof, it will be understood by those skilled in the art that changes in form and detail may be made therein without departing from the scope of the invention as set forth in the appended claims. Such changes, modifications and alterations are intended to be within the scope of the present invention.
例えば、上記の実施形態においては、ピッチ角変更モータの数は2であるが、3以上のピッチ角変更モータを推力発生装置1に設けて、これらのピッチ角変更モータの回転運動を直動伝達軸7Dの直線運動に変換してもよい。
For example, in the above embodiment, the number of pitch angle change motors is two, but three or more pitch angle change motors may be provided in the
上記の実施形態においては、プロペラRは推力発生装置1の真下に配置され、推力発生装置1は飛翔体の機体の下部に装着されるが、プロペラRは推力発生装置1の真上に配置され、推力発生装置1は飛翔体の機体の上部に装着されてもよい。
In the above embodiment, the propeller R is disposed directly below the
1 推力発生装置
2 推力発生モータ
2A ステータ
2B ロータ
2C フレーム
R プロペラ
H1~H3 回転翼
P1~P3 グリップ
4 ロータ軸
5A,5B ピッチ角変更モータ
6 運動伝達ユニット
6A,6B 回転伝達部
7 回転直動変換部
7D 直動伝達軸
7F ボールねじ軸
8 直動回転変換部
1
Claims (2)
前記回転翼のピッチ角を変更する複数のピッチ角変更モータと、
前記複数のピッチ角変更モータにそれぞれ連結された複数の回転伝達部と、
単一の直動軸と運動変換機構を有し、前記運動変換機構が前記複数の回転伝達部と前記直動軸に連結可能であって、少なくとも1つの回転伝達部の回転を前記直動軸の直線運動に変換する、第1の運動変換部と、
前記直動軸の直線運動を回転運動に変換して、前記回転翼のピッチ角を変更する第2の運動変換部とを
備え、
前記ピッチ角変更モータは、前記推力発生モータの内部に配置され、前記推力発生モータの静止部材に固定されていることを特徴とする推力発生装置。 a thrust generating motor that rotates a plurality of rotors to generate thrust;
A plurality of pitch angle changing motors for changing the pitch angle of the rotor blades;
a plurality of rotation transmission units respectively connected to the plurality of pitch angle changing motors;
a first motion conversion unit having a single linear motion shaft and a motion conversion mechanism, the motion conversion mechanism being connectable to the plurality of rotation transmission units and the linear motion shaft, and converting rotation of at least one of the rotation transmission units into linear motion of the linear motion shaft;
a second motion conversion unit that converts the linear motion of the linear motion shaft into rotational motion to change the pitch angle of the rotor ,
13. A thrust generating apparatus , comprising: a pitch angle changing motor arranged inside the thrust generating motor and fixed to a stationary member of the thrust generating motor .
ことを特徴とする請求項1に記載の推力発生装置。 2. The thrust generating device according to claim 1, wherein the motion conversion mechanism of the first motion conversion unit is constantly connected to the plurality of rotation transmission units and is capable of converting rotations of the plurality of rotation transmission units into linear motion of the linear motion shaft.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020047048A JP7468018B2 (en) | 2020-03-17 | 2020-03-17 | Thrust generating device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020047048A JP7468018B2 (en) | 2020-03-17 | 2020-03-17 | Thrust generating device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021146821A JP2021146821A (en) | 2021-09-27 |
| JP7468018B2 true JP7468018B2 (en) | 2024-04-16 |
Family
ID=77850618
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020047048A Active JP7468018B2 (en) | 2020-03-17 | 2020-03-17 | Thrust generating device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7468018B2 (en) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060049304A1 (en) | 2002-01-07 | 2006-03-09 | Sanders John K Jr | Quiet vertical takeoff and landing aircraft using ducted, magnetic induction air-impeller rotors |
| US20100021295A1 (en) | 2008-07-15 | 2010-01-28 | Perkinson Robert H | Controllable pitch propeller with electrical power generation |
| JP2013139247A (en) | 2011-12-28 | 2013-07-18 | Eurocopter Deutschland Gmbh | Electrical powered tail rotor of helicopter |
| JP2013193565A (en) | 2012-03-19 | 2013-09-30 | Showa Corp | Electric power steering device |
| JP2017109726A (en) | 2015-10-08 | 2017-06-22 | ロッキード マーティン コーポレイションLockheed Martin Corporation | Reduced-complexity ring motor design for propeller driven vehicles |
| JP2018052227A (en) | 2016-09-27 | 2018-04-05 | アダマンド並木精密宝石株式会社 | Pitch change mechanism and variable pitch type rotary vane mechanism |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57194193A (en) * | 1981-05-22 | 1982-11-29 | Kogyo Gijutsuin | Variable pitch mechanism for rotor |
| JPS5957096A (en) * | 1982-09-28 | 1984-04-02 | 社団法人 日本航空宇宙工業会 | Low pitch stop mechanism of rotor blade variable pitch mech anism |
| JPS5950900U (en) * | 1982-09-28 | 1984-04-04 | 社団法人日本航空宇宙工業会 | Rotary blade pitch conversion device |
| US4753572A (en) * | 1986-10-02 | 1988-06-28 | United Technologies Corporation | Propeller pitch change actuation system |
| US4927329A (en) * | 1988-10-21 | 1990-05-22 | General Electric Company | Aircraft engine unducted fan blade pitch control system |
| JP3363163B2 (en) * | 1991-09-30 | 2003-01-08 | 東芝エンジニアリング株式会社 | Variable pitch propeller drive |
-
2020
- 2020-03-17 JP JP2020047048A patent/JP7468018B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060049304A1 (en) | 2002-01-07 | 2006-03-09 | Sanders John K Jr | Quiet vertical takeoff and landing aircraft using ducted, magnetic induction air-impeller rotors |
| US20100021295A1 (en) | 2008-07-15 | 2010-01-28 | Perkinson Robert H | Controllable pitch propeller with electrical power generation |
| JP2013139247A (en) | 2011-12-28 | 2013-07-18 | Eurocopter Deutschland Gmbh | Electrical powered tail rotor of helicopter |
| JP2013193565A (en) | 2012-03-19 | 2013-09-30 | Showa Corp | Electric power steering device |
| JP2017109726A (en) | 2015-10-08 | 2017-06-22 | ロッキード マーティン コーポレイションLockheed Martin Corporation | Reduced-complexity ring motor design for propeller driven vehicles |
| JP2018052227A (en) | 2016-09-27 | 2018-04-05 | アダマンド並木精密宝石株式会社 | Pitch change mechanism and variable pitch type rotary vane mechanism |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021146821A (en) | 2021-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2890716C (en) | Three point harmonic drive | |
| US3203275A (en) | Mechanical actuator | |
| US5807202A (en) | Differential speed transmission | |
| JP7307559B2 (en) | rotator and aircraft | |
| RU2716718C2 (en) | Airborne vehicle and planetary gear systems | |
| EP1881176A2 (en) | An engine arrangement | |
| CN112109878A (en) | Folding mechanism suitable for folding morphing wing | |
| JPS6050639B2 (en) | coaxial twin-rotating helicopter | |
| JP7468018B2 (en) | Thrust generating device | |
| US20080056897A1 (en) | Counter rotating rotor head | |
| JPS591895B2 (en) | Decelerator | |
| JP7468019B2 (en) | Thrust generating device | |
| JP7354890B2 (en) | thrust generator | |
| JP7468020B2 (en) | Thrust generating device | |
| JP2022032942A (en) | Flight device | |
| JP7521318B2 (en) | Thrust generating device | |
| JP7409177B2 (en) | thrust generator | |
| JP7392532B2 (en) | thrust generator | |
| JP7428102B2 (en) | thrust generator | |
| US11718387B2 (en) | Propellant force generator | |
| CN111377050B (en) | Coaxial rotor wing control device | |
| JP2022033690A (en) | Thrust generator | |
| EP3137377B1 (en) | Radially compliant quill shaft | |
| JP2021147036A (en) | Thrust generator | |
| JP2021147038A (en) | Thrust generator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230301 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231024 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240318 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7468018 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |