JP7445642B2 - クロスリアリティシステム - Google Patents
クロスリアリティシステム Download PDFInfo
- Publication number
- JP7445642B2 JP7445642B2 JP2021507660A JP2021507660A JP7445642B2 JP 7445642 B2 JP7445642 B2 JP 7445642B2 JP 2021507660 A JP2021507660 A JP 2021507660A JP 2021507660 A JP2021507660 A JP 2021507660A JP 7445642 B2 JP7445642 B2 JP 7445642B2
- Authority
- JP
- Japan
- Prior art keywords
- map
- coordinate frame
- frame
- world
- head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 139
- 238000003860 storage Methods 0.000 claims description 89
- 238000001514 detection method Methods 0.000 claims description 39
- 238000009877 rendering Methods 0.000 claims description 22
- 238000005259 measurement Methods 0.000 claims description 20
- 238000004441 surface measurement Methods 0.000 claims description 18
- 230000033001 locomotion Effects 0.000 claims description 17
- 230000008859 change Effects 0.000 claims description 14
- 230000001131 transforming effect Effects 0.000 claims 1
- 210000003128 head Anatomy 0.000 description 195
- 230000002085 persistent effect Effects 0.000 description 159
- 101100400452 Caenorhabditis elegans map-2 gene Proteins 0.000 description 73
- 238000010586 diagram Methods 0.000 description 64
- 230000007613 environmental effect Effects 0.000 description 63
- 238000012545 processing Methods 0.000 description 47
- 238000001914 filtration Methods 0.000 description 42
- 230000000007 visual effect Effects 0.000 description 40
- 101150064138 MAP1 gene Proteins 0.000 description 27
- 230000008447 perception Effects 0.000 description 24
- 238000004458 analytical method Methods 0.000 description 18
- 230000008569 process Effects 0.000 description 17
- 210000001747 pupil Anatomy 0.000 description 17
- 230000009466 transformation Effects 0.000 description 14
- 210000001525 retina Anatomy 0.000 description 12
- 238000004422 calculation algorithm Methods 0.000 description 11
- 230000004807 localization Effects 0.000 description 11
- 230000036544 posture Effects 0.000 description 11
- 230000003190 augmentative effect Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 9
- 238000005516 engineering process Methods 0.000 description 9
- 238000011176 pooling Methods 0.000 description 9
- 238000000844 transformation Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 230000008901 benefit Effects 0.000 description 7
- 230000003993 interaction Effects 0.000 description 7
- 238000012549 training Methods 0.000 description 7
- 239000013598 vector Substances 0.000 description 7
- 230000005484 gravity Effects 0.000 description 6
- 230000010354 integration Effects 0.000 description 6
- 238000013528 artificial neural network Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 5
- 238000013500 data storage Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 4
- 101100082497 Oryza sativa subsp. japonica PCF3 gene Proteins 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 230000004418 eye rotation Effects 0.000 description 4
- 238000011084 recovery Methods 0.000 description 4
- 241000282994 Cervidae Species 0.000 description 3
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 3
- 230000004075 alteration Effects 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 229910001416 lithium ion Inorganic materials 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000013507 mapping Methods 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000002688 persistence Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 3
- 230000001960 triggered effect Effects 0.000 description 3
- 210000004556 brain Anatomy 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 238000013135 deep learning Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 210000000613 ear canal Anatomy 0.000 description 2
- 230000004438 eyesight Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 2
- 230000000717 retained effect Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- 241000256837 Apidae Species 0.000 description 1
- 101100206190 Arabidopsis thaliana TCP20 gene Proteins 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 101100082494 Oryza sativa subsp. japonica PCF1 gene Proteins 0.000 description 1
- XYFCBTPGUUZFHI-UHFFFAOYSA-N Phosphine Chemical compound P XYFCBTPGUUZFHI-UHFFFAOYSA-N 0.000 description 1
- 206010034962 Photopsia Diseases 0.000 description 1
- 101100260216 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) BRF1 gene Proteins 0.000 description 1
- 101100045761 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) TFC4 gene Proteins 0.000 description 1
- 230000004308 accommodation Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004931 aggregating effect Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000000744 eyelid Anatomy 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 210000000653 nervous system Anatomy 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 229910000065 phosphene Inorganic materials 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 238000007670 refining Methods 0.000 description 1
- 230000010076 replication Effects 0.000 description 1
- 230000015541 sensory perception of touch Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000002459 sustained effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000016776 visual perception Effects 0.000 description 1
Images


















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/006—Mixed reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/05—Geographic models
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0093—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for monitoring data relating to the user, e.g. head-tracking, eye-tracking
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B27/0172—Head mounted characterised by optical features
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/20—Scenes; Scene-specific elements in augmented reality scenes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0132—Head-up displays characterised by optical features comprising binocular systems
- G02B2027/0134—Head-up displays characterised by optical features comprising binocular systems of stereoscopic type
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/014—Head-up displays characterised by optical features comprising information/image processing systems
Description
本願は、参照することによってその全体として本明細書に組み込まれる、2018年8月13日に出願され、「VIEWING DEVICE OR VIEWING DEVICES HAVING ONE OR MORE COORDINATE FRAME TRANSFORMERS」と題された、米国仮特許出願第62/718,357号の優先権および利点を主張する。本特許出願はまた、参照することによってその全体として本明細書に組み込まれる、2018年10月5日に出願され、「COORDINATE FRAME PROCESSING AUGMENTED REALITY」と題された、米国仮特許出願第62/742,237号の優先権および利点を主張する。本特許出願はまた、参照することによってその全体として本明細書に組み込まれる、2019年3月1日に出願され、「MERGING A PLURALITY OF INDIVIDUALLY MAPPED ENVIRONMENTS」と題された、米国仮特許出願第62/812,935号の優先権および利点を主張し、参照することによってその全体として本明細書に組み込まれる、2019年3月8日に出願され、「VIEWING DEVICE OR VIEWING DEVICES HAVING ONE OR MORE COORDINATE FRAME TRANSFORMERS」と題された、米国仮特許出願第62/815,955号の優先権および利点を主張する。本特許出願はまた、参照することによってその全体として本明細書に組み込まれる、2019年6月28日に出願され、「RANKING AND MERGING A PLURALITY OF ENVIRONMENT MAPS」と題された、米国仮特許出願第62/868,786号の優先権および利点を主張する。本特許出願はまた、参照することによってその全体として本明細書に組み込まれる、2019年7月5日に出願され、「RANKING AND MERGING A PLURALITY OF ENVIRONMENT MAPS」と題された、米国仮特許出願第62/870,954号の優先権および利点を主張する。本特許出願はまた、参照することによってその全体として本明細書に組み込まれる、2019年8月8日に出願され、「A VIEWING SYSTEM」と題された、米国仮特許出願第62/884,109号の優先権および利点を主張する。
本発明は、例えば、以下を提供する。
(項目1)
座標フレーム変換
XRシステムであって、
第1のXRデバイスであって、前記第1のXRデバイスは、
第1のプロセッサと、
前記第1のプロセッサに接続される第1のコンピュータ可読媒体と、
前記第1のコンピュータ可読媒体上に記憶される第1の原点座標フレームと、
前記コンピュータ可読媒体上に記憶される第1の目的地座標フレームと、
ローカルコンテンツを表すデータを受信する第1のデータチャネルと、
第1の座標フレーム変換器であって、前記第1の座標フレーム変換器は、前記ローカルコンテンツの位置付けを前記第1の原点座標フレームから前記第1の目的地座標フレームに変換するように、前記第1のプロセッサによって実行可能である、第1の座標フレーム変換器と、
第1のディスプレイシステムであって、前記第1のディスプレイシステムは、前記ローカルコンテンツの位置付けを前記第1の原点座標フレームから前記第1の目的地座標フレームに変換後、ローカルコンテンツを第1のユーザに表示するように適合される、第1のディスプレイシステムと
を含む、第1のXRデバイス
を備える、XRシステム。
(項目2)
前記第1のXRデバイスはさらに、
実オブジェクトの位置付けを検出する第1の実オブジェクト検出デバイスと、
第1の世界表面決定ルーチンであって、前記第1の世界表面決定ルーチンは、前記実オブジェクトの表面上の少なくとも1つの点の位置付けを識別するように、前記第1のプロセッサによって実行可能である、第1の世界表面決定ルーチンと、
第1の世界フレーム決定ルーチンであって、前記第1の世界フレーム決定ルーチンは、前記少なくとも1つの点に基づいて、第1の世界座標フレームを計算するように、前記第1のプロセッサによって実行可能であり、前記第1の原点および第1の目的地座標フレームのうちの1つは、前記第1の世界座標フレームである、第1の世界フレーム決定ルーチンと、
第1の世界フレーム記憶命令であって、前記第1の世界フレーム記憶命令は、前記世界座標フレームを前記コンピュータ可読媒体上に記憶するように、前記第1のプロセッサによって実行可能である、第1の世界フレーム記憶命令と
を含む、項目1に記載のXRシステム。
(項目3)
前記第1の実オブジェクト検出デバイスは、カメラである、項目2に記載のXRシステム。
(項目4)
前記第1の実オブジェクト検出デバイスは、複数の実オブジェクトの位置付けを検出する、項目2に記載のXRシステム。
(項目5)
前記第1の世界表面決定ルーチンは、前記実オブジェクトの表面上の複数の点の位置付けを識別する、項目2に記載のXRシステム。
(項目6)
前記第1の世界フレーム決定ルーチンは、前記複数の点に基づいて、前記第1の世界座標フレームを計算する、項目5に記載のXRシステム。
(項目7)
前記第1のXRデバイスはさらに、
第1の頭部搭載可能フレームと、
第1の頭部フレーム決定ルーチンであって、前記第1の頭部フレーム決定ルーチンは、前記第1の頭部搭載可能フレームの移動に応じて変化する第1の頭部座標フレームを計算するように、前記第1のプロセッサによって実行可能であり、前記第1の原点および第1の目的地座標フレームのうちの1つは、前記第1の頭部座標フレームである、第1の頭部フレーム決定ルーチンと、
第1の頭部フレーム記憶命令であって、前記第1の頭部フレーム記憶命令は、前記第1の頭部座標フレームを前記第1のコンピュータ可読媒体上に記憶するように、前記第1のプロセッサによって実行可能である、第1の頭部フレーム記憶命令と
を含む、項目2に記載のXRシステム。
(項目8)
前記第1の座標フレーム変換器は、前記第1の世界座標フレームを前記第1の頭部座標フレームに変換する第1の世界/頭部座標変換器である、項目7に記載のXRシステム。
(項目9)
前記第1のXRデバイスはさらに、
前記第1の頭部搭載可能フレームに固着され、前記第1の頭部搭載可能フレームの移動を検出する第1の慣性測定ユニットを含み、前記第1の頭部フレーム決定ルーチンは、前記第1の慣性測定ユニットの測定に基づいて、前記第1の頭部座標フレームを計算する、項目7に記載のXRシステム。
(項目10)
前記第1のデバイスはさらに、
前記第1の頭部搭載可能フレームに固着され、前記第1の頭部搭載可能フレームの移動を検出する第1の移動追跡カメラを含み、前記第1の頭部フレーム決定ルーチンは、前記第1の移動追跡カメラによって捕捉された画像に基づいて、前記第1の頭部座標フレームを計算する、項目7に記載のXRシステム。
(項目11)
前記第1のXRデバイスはさらに、
第1のローカルフレーム決定ルーチンであって、前記第1のローカルフレーム決定ルーチンは、前記ローカルコンテンツの第1のローカル座標フレームを計算するように、前記第1のプロセッサによって実行可能であり、前記第1の原点および第1の目的地座標フレームのうちの1つは、前記ローカル座標フレームである、第1のローカルフレーム決定ルーチンと、
第1のローカルフレーム記憶命令であって、前記第1のローカルフレーム記憶命令は、前記ローカル座標フレームを前記コンピュータ可読媒体上に記憶するように、前記第1のプロセッサによって実行可能である、第1のローカルフレーム記憶命令と
を含む、項目2に記載のXRシステム。
(項目12)
前記第1の座標フレーム変換器は、前記第1のローカル座標フレームを前記第1の世界座標フレームに変換する第1のローカル/世界座標変換器である、項目11に記載のXRシステム。
(項目13)
前記第1のXRデバイスはさらに、
前記第1のコンピュータ可読媒体上に記憶される第1のカメラフレームを含み、前記第1のカメラフレームは、前記第1の頭部搭載可能フレームに対して移動する眼の複数の眼位置を含み、前記第1の座標フレーム変換器は、前記第1の頭部座標フレームを前記第1のカメラ座標フレームに変換する第1の頭部/カメラ座標変換器である、項目1に記載のXRシステム。
(項目14)
視認方法であって、
第1の原点座標フレームを記憶することと、
第1の目的地座標フレームを記憶することと、
ローカルコンテンツを表すデータを受信することと、
ローカルコンテンツの位置付けを前記第1の原点座標フレームから前記第1の目的地座標フレームに変換することと、
前記ローカルコンテンツの位置付けを前記第1の原点座標フレームから前記第1の目的地座標フレームに変換後、前記ローカルコンテンツを第1のユーザに表示することと
を含む、方法。
規準マップ
(項目15)
XRシステムであって、
複数のアンカを有する規準マップである第1のマップを記憶するマップ記憶ルーチンであって、前記第1のマップの各アンカは、座標のセットを有する、マップ記憶ルーチンと、
実オブジェクトの場所を検出するように位置付けられる実オブジェクト検出デバイスと、
前記実オブジェクト検出デバイスに接続され、前記実オブジェクトの場所に基づいて、第2のマップのアンカを検出するアンカ識別システムであって、前記第2のマップの各アンカは、座標のセットを有する、アンカ識別システムと、
位置特定モジュールであって、前記位置特定モジュールは、前記規準マップおよび前記第2のマップに接続され、前記第2のマップの第1のアンカを前記規準マップの第1のアンカにマッチングさせ、前記第2のマップの第2のアンカを前記規準マップの第2のアンカにマッチングさせることによって、前記第2のマップを前記規準マップに対して位置特定するように実行可能である、位置特定モジュールと
を備える、XRシステム。
(項目16)
実オブジェクト検出デバイスは、実オブジェクト検出カメラである、項目15に記載のXRシステム。
(項目17)
前記規準マップおよび前記第2のマップに接続され、前記規準マップの第3のアンカを前記第2のマップに組み込むように実行可能である規準マップ組込器をさらに備える、項目15に記載のXRシステム。
(項目18)
XRデバイスであって、前記XRデバイスは、
頭部ユニットであって、
頭部搭載可能フレームであって、前記実オブジェクト検出デバイスは、前記頭部搭載可能フレームに搭載される、頭部搭載可能フレームと、
ローカルコンテンツの画像データを受信するデータチャネルと、
前記データチャネルに接続され、前記ローカルコンテンツを前記規準マップの1つのアンカに関連させるように実行可能であるローカルコンテンツ位置付けシステムと、
前記ローカルコンテンツ位置付けシステムに接続され、前記ローカルコンテンツを表示するディスプレイシステムと
を備える、頭部ユニット
を含む、XRデバイス
をさらに備える、項目15に記載のXRシステム。
(項目19)
前記ローカルコンテンツのローカル座標フレームを前記第2のマップの世界座標フレームに変換するローカル/世界座標変換器をさらに備える、項目18に記載のXRシステム。
(項目20)
前記第2のマップのアンカに基づいて、第1の世界座標フレームを計算する第1の世界フレーム決定ルーチンと、
前記世界座標フレームを記憶する第1の世界フレーム記憶命令と、
前記頭部搭載可能フレームの移動に応じて変化する頭部座標フレームを計算する頭部フレーム決定ルーチンと、
前記第1の頭部座標フレームを記憶する頭部フレーム記憶命令と、
前記世界座標フレームを前記頭部座標フレームに変換する世界/頭部座標変換器と
をさらに備える、項目18に記載のXRシステム。
(項目21)
前記頭部座標フレームは、前記頭部搭載可能フレームが移動すると、前記世界座標フレームに対して変化する、項目20に記載のXRシステム。
(項目22)
前記第2のマップの少なくとも1つのアンカに関連する少なくとも1つの音要素をさらに備える、項目18に記載のXRシステム。
(項目23)
前記第1および第2のマップは、前記XRデバイスによって作成される、項目18に記載のXRシステム。
(項目24)
第1および第2のXRデバイスであって、各XRデバイスは、
頭部ユニットであって、
頭部搭載可能フレームであって、前記実オブジェクト検出デバイスは、前記頭部搭載可能フレームに搭載される、頭部搭載可能フレームと、
ローカルコンテンツの画像データを受信するデータチャネルと、
前記データチャネルに接続され、前記ローカルコンテンツを前記規準マップの1つのアンカに関連させるように実行可能であるローカルコンテンツ位置付けシステムと、
前記ローカルコンテンツ位置付けシステムに接続され、前記ローカルコンテンツを表示するディスプレイシステムと
を備える、頭部ユニット
を含む、第1および第2のXRデバイス
をさらに備える、項目15に記載のXRシステム。
(項目25)
前記第1のXRデバイスは、前記第1のマップのためのアンカを作成し、前記第2のXRデバイスは、前記第2のマップのためのアンカを作成し、前記位置特定モジュールは、前記第2のXRデバイスの一部を形成する、項目24に記載のXRシステム。
(項目26)
前記第1および第2のマップは、それぞれ、第1および第2のセッションにおいて作成される、項目25に記載のXRシステム。
(項目27)
前記第1および第2のマップは、同一セッションにおいて作成される、項目25に記載のXRシステム。
(項目28)
サーバと、
前記XRデバイスの一部を形成し、前記第1のマップをネットワークを経由してサーバからダウンロードするマップダウンロードシステムと
をさらに備える、項目18に記載のXRシステム。
(項目29)
前記位置特定モジュールは、前記第2のマップを前記規準マップに対して位置特定するように繰り返し試みる、項目15に記載のXRシステム。
(項目30)
前記第2のマップを前記ネットワークを経由して前記サーバにアップロードするマップ発行器をさらに備える、項目15に記載のXRシステム。
(項目31)
前記規準マップは、前記サーバ上に記憶され、
前記第2のマップと前記規準マップをマージする前記サーバ上のマップマージアルゴリズムと、
前記第2のマップが前記規準マップとマージされた後、前記規準マップを伝送するマップ伝送機と
をさらに備える、項目15に記載のXRシステム。
(項目32)
視認方法であって、
複数のアンカを有する規準マップである第1のマップを記憶することであって、前記規準マップの各アンカは、座標のセットを有する、ことと、
実オブジェクトの場所を検出することと、
前記実オブジェクトの場所に基づいて、第2のマップのアンカを検出することであって、前記第2のマップの各アンカは、座標のセットを有する、ことと、
前記第2のマップの第1のアンカを前記第1のマップの第1のアンカにマッチングさせ、前記第2のマップの第2のアンカを前記規準マップの第2のアンカにマッチングさせることによって、前記第2のマップを前記規準マップに対して位置特定することと
を含む、方法。
規準マップフィルタリング
(項目33)
XRシステムであって、
サーバであって、
プロセッサと、
前記プロセッサに接続されるコンピュータ可読媒体と、
前記コンピュータ可読媒体上の複数の規準マップと、
各個別の規準マップと関連付けられる前記コンピュータ可読媒体上の個別の規準マップ識別子であって、前記規準マップ識別子は、相互に異なり、前記規準マップを一意に識別する、規準マップ識別子と、
位置検出器であって、前記位置検出器は、前記コンピュータ可読媒体上にあり、位置識別子をXRデバイスから受信し、記憶するように、前記プロセッサによって実行可能である、位置検出器と、
第1のフィルタであって、前記第1のフィルタは、前記コンピュータ可読媒体上にあり、前記位置識別子と前記規準マップ識別子を比較し、第1のフィルタリングされた選択を形成する1つ以上の規準マップを決定するように、前記プロセッサによって実行可能である、第1のフィルタと、
マップ伝送機であって、前記マップ伝送機は、前記コンピュータ可読媒体上にあり、前記第1のフィルタリングされた選択に基づいて、前記規準マップのうちの1つ以上のものを前記XRデバイスに伝送するように、前記プロセッサによって実行可能である、マップ伝送機と
を有する、サーバ
を備える、XRシステム。
(項目34)
前記規準マップ識別子はそれぞれ、経度および緯度を含み、前記位置識別子は、経度および緯度を含む、項目33に記載のXRシステム。
(項目35)
前記第1のフィルタは、近傍エリアフィルタであり、前記近傍エリアフィルタは、前記位置識別子の経度および緯度を含む経度および緯度を網羅する少なくとも1つのマッチング規準マップと、前記第1のマッチング規準マップに隣接する経度および緯度を網羅する少なくとも1つの近傍マップとを選択する、項目34に記載のXRシステム。
(項目36)
前記位置識別子は、WiFiフィンガプリントを含み、
第2のフィルタであって、前記第2のフィルタは、WiFiフィンガプリントフィルタであり、前記コンピュータ可読媒体上にあり、前記プロセッサによって、
前記WiFiフィンガプリントに基づいて、緯度および経度を決定することと、
前記WiFiフィンガプリントフィルタからの緯度および経度と前記規準マップの緯度および経度を比較し、前記第1のフィルタリングされた選択内の第2のフィルタリングされた選択を形成する1つ以上の規準マップを決定することであって、前記マップ伝送機は、前記第2の選択に基づいて、1つ以上の規準マップを伝送し、前記第2の選択外の前記第1の選択に基づく規準マップを伝送しない、ことと
を行うように実行可能である、第2のフィルタ
をさらに備える、項目35に記載のXRシステム。
(項目37)
前記第1のフィルタは、WiFiフィンガプリントフィルタであり、前記WiFiフィンガプリントフィルタは、前記コンピュータ可読媒体上にあり、前記プロセッサによって、
前記WiFiフィンガプリントに基づいて、緯度および経度を決定することと、
前記WiFiフィンガプリントフィルタからの緯度および経度と前記規準マップの緯度および経度を比較し、前記第1のフィルタリングされた選択を形成する1つ以上の規準マップを決定することと
を行うように実行可能である、項目33に記載のXRシステム。
(項目38)
多層知覚ユニットであって、前記多層知覚ユニットは、前記コンピュータ可読媒体上にあり、前記プロセッサによって実行可能であり、画像の複数の特徴を受信し、各特徴を個別の数列に変換する、多層知覚ユニットと、
最大プールユニットであって、前記最大プールユニットは、前記コンピュータ可読媒体上にあり、前記プロセッサによって実行可能であり、各数列の最大値を前記画像を表すグローバル特徴列に組み合わせ、各規準マップは、前記グローバル特徴列のうちの少なくとも1つを有し、前記XRデバイスから受信された前記位置識別子は、前記多層知覚ユニットおよび前記最大プールユニットによって、前記画像のグローバル特徴列を決定するために進展される前記XRデバイスによって捕捉された画像の特徴を含む、最大プールユニットと、
キーフレームフィルタであって、前記キーフレームフィルタは、前記画像のグローバル特徴列と前記規準マップのグローバル特徴列を比較し、前記第2のフィルタリングされた選択内の第3のフィルタリングされた選択を形成する1つ以上の規準マップを決定し、前記マップ伝送機は、前記第3の選択に基づいて、1つ以上の規準マップを伝送し、前記第3の選択外の前記第2の選択に基づく規準マップを伝送しない、キーフレームフィルタと
をさらに備える、項目36に記載のXRシステム。
(項目39)
多層知覚ユニットであって、前記多層知覚ユニットは、前記コンピュータ可読媒体上にあり、前記プロセッサによって実行可能であり、画像の複数の特徴を受信し、各特徴を個別の数列に変換する、多層知覚ユニットと、
最大プールユニットであって、前記最大プールユニットは、前記コンピュータ可読媒体上にあり、前記プロセッサによって実行可能であり、各数列の最大値を前記画像を表すグローバル特徴列に組み合わせ、各規準マップは、前記グローバル特徴列のうちの少なくとも1つを有し、前記XRデバイスから受信された前記位置識別子は、前記多層知覚ユニットおよび前記最大プールユニットによって、前記画像のグローバル特徴列を決定するために進展される前記XRデバイスによって捕捉された画像の特徴を含む、最大プールユニットと
をさらに備え、
前記第1のフィルタは、前記画像のグローバル特徴列と前記規準マップのグローバル特徴列を比較し、1つ以上の規準マップを決定するキーフレームフィルタである、項目33に記載のXRシステム。
(項目40)
XRデバイスであって、前記XRデバイスは、
頭部ユニットであって、
頭部搭載可能フレームであって、前記実オブジェクト検出デバイスは、前記頭部搭載可能フレームに搭載される、頭部搭載可能フレームと、
ローカルコンテンツの画像データを受信するデータチャネルと、
ローカルコンテンツ位置付けシステムであって、前記ローカルコンテンツ位置付けシステムは、前記データチャネルに接続され、前記ローカルコンテンツを前記規準マップの1つのアンカに関連させるように実行可能である、ローカルコンテンツ位置付けシステムと、
ディスプレイシステムであって、前記ディスプレイシステムは、前記ローカルコンテンツ位置付けシステムに接続され、前記ローカルコンテンツを表示する、ディスプレイシステムと
を備える、頭部ユニット
を含む、XRデバイス
をさらに備える、項目33に記載のXRシステム。
(項目41)
前記XRデバイスは、
複数のアンカを有する規準マップである第1のマップを記憶するマップ記憶ルーチンであって、前記第1のマップの各アンカは、座標のセットを有する、マップ記憶ルーチンと、
実オブジェクトの場所を検出するように位置付けられる実オブジェクト検出デバイスと、
前記実オブジェクト検出デバイスに接続され、前記実オブジェクトの場所に基づいて、第2のマップのアンカを検出するアンカ識別システムであって、前記第2のマップの各アンカは、座標のセットを有する、アンカ識別システムと、
位置特定モジュールであって、前記位置特定モジュールは、前記規準マップおよび前記第2のマップに接続され、前記第2のマップの第1のアンカを前記規準マップの第1のアンカにマッチングさせ、前記第2のマップの第2のアンカを前記規準マップの第2のアンカにマッチングさせることによって、前記第2のマップを前記規準マップに対して位置特定するように実行可能である、位置特定モジュールと
を含む、項目40に記載のXRシステム。
(項目42)
実オブジェクト検出デバイスは、実オブジェクト検出カメラである、項目41に記載のXRシステム。
(項目43)
前記規準マップおよび前記第2のマップに接続され、前記規準マップの第3のアンカを前記第2のマップに組み込むように実行可能である規準マップ組込器をさらに備える、項目41に記載のXRシステム。
(項目44)
視認方法であって、
複数の規準マップをコンピュータ可読媒体上に記憶することであって、各規準マップは、前記個別の規準マップと関連付けられる個別の規準マップを有し、前記規準マップ識別子は、相互に異なり、前記規準マップを一意に識別する、ことと、
前記コンピュータ可読媒体に接続されるプロセッサを用いて、位置識別子をXRデバイスから受信し、記憶することと、
前記プロセッサを用いて、前記位置識別子と前記規準マップ識別子を比較し、第1のフィルタリングされた選択を形成する1つ以上の規準マップを決定することと、
前記プロセッサを用いて、前記第1のフィルタリングされた選択に基づいて、複数の前記規準マップを前記XRデバイスに伝送することと
を含む、方法。
キーフレーム
(項目45)
XRシステムであって、
プロセッサと、
前記プロセッサに接続されるコンピュータ可読媒体と、
多層知覚ユニットであって、前記多層知覚ユニットは、前記コンピュータ可読媒体上にあり、前記プロセッサによって実行可能であり、画像の複数の特徴を受信し、各特徴を個別の数列に変換する、多層知覚ユニットと、
最大プールユニットであって、前記最大プールユニットは、前記コンピュータ可読媒体上にあり、前記プロセッサによって実行可能であり、各数列の最大値を前記画像を表すグローバル特徴列に組み合わせる、最大プールユニットと
を備える、XRシステム。
(項目46)
前記コンピュータ可読媒体上の複数の規準マップであって、各規準マップは、それと関連付けられる前記グローバル特徴列のうちの少なくとも1つを有する、複数の規準マップと、
位置検出器であって、前記位置検出器は、前記コンピュータ可読媒体上にあり、前記画像のグローバル特徴列を決定するために、前記多層知覚ユニットおよび前記最大プールユニットによって処理されるXRデバイスによって捕捉された画像の特徴を前記XRデバイスから受信するように、前記プロセッサによって実行可能である、位置検出器と、
キーフレームフィルタであって、前記キーフレームフィルタは、前記画像のグローバル特徴列と前記規準マップのグローバル特徴列を比較し、フィルタリングされた選択の一部を形成する1つ以上の規準マップを決定する、キーフレームフィルタと、
マップ伝送機であって、前記マップ伝送機は、前記コンピュータ可読媒体上にあり、前記フィルタリングされた選択に基づいて、前記規準マップのうちの1つ以上のものを前記XRデバイスに伝送するように、前記プロセッサによって実行可能である、マップ伝送機と
をさらに備える、項目45に記載のXRシステム。
(項目47)
XRデバイスであって、前記XRデバイスは、
頭部ユニットであって、
頭部搭載可能フレームであって、前記実オブジェクト検出デバイスは、前記頭部搭載可能フレームに搭載される、頭部搭載可能フレームと、
ローカルコンテンツの画像データを受信するデータチャネルと、
ローカルコンテンツ位置付けシステムであって、前記ローカルコンテンツ位置付けシステムは、前記データチャネルに接続され、前記ローカルコンテンツを前記規準マップの1つのアンカに関連させるように実行可能である、ローカルコンテンツ位置付けシステムと、
ディスプレイシステムであって、前記ディスプレイシステムは、前記ローカルコンテンツ位置付けシステムに接続され、前記ローカルコンテンツを表示する、ディスプレイシステムと
を備える、頭部ユニット
を含む、XRデバイス
をさらに備える、項目45に記載のXRシステム。
(項目48)
XRデバイスであって、前記XRデバイスは、
頭部ユニットであって、
頭部搭載可能フレームであって、前記実オブジェクト検出デバイスは、前記頭部搭載可能フレームに搭載される、頭部搭載可能フレームと、
ローカルコンテンツの画像データを受信するデータチャネルと、
ローカルコンテンツ位置付けシステムであって、前記ローカルコンテンツ位置付けシステムは、前記データチャネルに接続され、前記ローカルコンテンツを前記規準マップの1つのアンカに関連させるように実行可能である、ローカルコンテンツ位置付けシステムと、
前記ローカルコンテンツ位置付けシステムに接続され、前記ローカルコンテンツを表示するディスプレイシステムであって、前記マッチングさせることは、前記第2のマップのグローバル特徴列を前記規準マップのグローバル特徴列にマッチングさせることによって実行される、ディスプレイシステムと
を備える、頭部ユニット
を含む、XRデバイス
をさらに備える、項目47に記載のXRシステム。
(項目49)
視認方法であって、
プロセッサを用いて、画像の複数の特徴を受信することと、
前記プロセッサを用いて、各特徴を個別の数列に変換することと、
前記プロセッサを用いて、各数列の最大値を前記画像を表すグローバル特徴列に組み合わせることと
を含む、方法。
ランク付けおよびマージマップ(第‘823号から)
(項目50)
コンピューティングシステムを動作させ、データベース内に記憶される1つ以上の環境マップを識別し、ユーザによって装着されるデバイスによって収集されたセンサデータに基づいて算出された追跡マップとマージする方法であって、前記デバイスは、前記追跡マップを算出する間、コンピュータネットワークへのアクセスポイントの信号を受信し、前記方法は、
前記アクセスポイントとの通信の特性に基づいて、前記追跡マップの少なくとも1つのエリア属性を決定することと、
前記少なくとも1つのエリア属性に基づいて、前記追跡マップの地理的場所を決定することと、
前記決定された地理的場所に対応する前記データベース内に記憶される環境マップのセットを識別することと、
前記追跡マップおよび環境マップのセットの環境マップと関連付けられるネットワークアクセスポイントの1つ以上の識別子の類似性に基づいて、環境マップのセットをフィルタリングすることと、
前記追跡マップおよび環境マップのセットの環境マップのコンテンツを表すメトリックの類似性に基づいて、環境マップのセットをフィルタリングすることと、
前記追跡マップの一部と環境マップのセットの環境マップの一部との間のマッチング度に基づいて、環境マップのセットをフィルタリングすることと
を含む、方法。
(項目51)
前記ネットワークアクセスポイントの1つ以上の識別子の類似性に基づいて、環境マップのセットをフィルタリングすることは、環境マップのセット内に、前記ネットワークアクセスポイントの1つ以上の識別子に基づいて、前記追跡マップの少なくとも1つのエリア属性との最高Jaccard類似性を伴う環境マップを留保することを含む、項目50に記載の方法。
(項目52)
前記追跡マップおよび環境マップのセットの環境マップのコンテンツを表すメトリックの類似性に基づいて、環境マップのセットをフィルタリングすることは、環境マップのセット内に、前記追跡マップの特性のベクトルと環境マップのセット内の環境マップを表すベクトルとの間に最小ベクトル距離を伴う環境マップを留保することを含む、項目50に記載の方法。
(項目53)
前記追跡マップおよび前記環境マップのコンテンツを表すメトリックは、前記マップのコンテンツから算出された値のベクトルを含む、項目50に記載の方法。
(項目54)
前記追跡マップの一部と環境マップのセットの環境マップの一部との間のマッチング度に基づいて、環境マップのセットをフィルタリングすることは、
環境マップのセットの環境マップ内にもまた表される前記追跡マップによって表される物理的世界の体積を算出することと、
環境マップのセット内に、前記セットからフィルタリング除去された環境マップより大きい算出された体積を伴う環境マップを留保することと
を含む、項目50に記載の方法。
(項目55)
環境マップのセットは、
最初に、前記1つ以上の識別子の類似性に基づいて、
続いて、コンテンツを表す前記メトリックの類似性に基づいて、
続いて、前記追跡マップの一部と前記環境マップの一部との間のマッチング度に基づいて、
フィルタリングされる、項目50に記載の方法。
(項目56)
前記1つ以上の識別子の類似性と、
コンテンツを表す前記メトリックの類似性と、
前記追跡マップの一部と前記環境マップの一部との間のマッチング度と
に基づく環境マップのセットのフィルタリングは、前記フィルタリングを実施するために要求される処理に基づく順序で実施される、
項目50に記載の方法。
(項目57)
環境マップは、
前記1つ以上の識別子の類似性と、
コンテンツを表す前記メトリックの類似性と、
前記追跡マップの一部と前記環境マップの一部との間のマッチング度と
に基づく環境マップのセットのフィルタリングに基づいて選択され、
情報は、前記選択された環境マップから前記ユーザデバイス上にロードされる、
項目50に記載の方法。
(項目58)
環境マップは、
前記1つ以上の識別子の類似性と、
コンテンツを表す前記メトリックの類似性と、
前記追跡マップの一部と前記環境マップの一部との間のマッチング度と、
に基づく環境マップのセットのフィルタリングに基づいて選択され、
前記追跡マップは、前記選択された環境マップとマージされる、
項目50に記載の方法。
(項目59)
センサを備える複数のユーザデバイスとの通信のために構成される拡張現実システムのためのクラウドコンピューティング環境であって、
前記複数のユーザデバイスが使用されたエリアを示すエリア識別を記憶するユーザデータベースであって、前記エリア識別は、使用時にユーザデバイスによって検出された無線ネットワークのパラメータを備える、ユーザデータベースと、
前記複数のユーザデバイスによって供給されるデータおよび関連付けられるメタデータから構築された複数の環境マップを記憶するマップデータベースであって、前記関連付けられるメタデータは、そこから前記マップが構築されたデータを供給した前記複数のユーザデバイスのエリア識別から導出されたエリア識別を備え、前記エリア識別は、そこから前記マップが構築されたデータを供給したユーザデバイスによって検出された無線ネットワークのパラメータを備える、マップデータベースと、
コンピュータ実行可能命令を記憶する非一過性コンピュータ記憶媒体であって、前記コンピュータ実行可能命令は、前記クラウドコンピューティング環境内の少なくとも1つのプロセッサによって実行されると、
メッセージを、ユーザデバイスによって検出された無線ネットワークのパラメータを備える前記複数のユーザデバイスから受信し、前記ユーザデバイスのためのエリア識別子を算出し、前記受信されたパラメータおよび/または前記算出されたエリア識別子に基づいて、前記ユーザデータベースを更新することと、
環境マップのための要求を前記複数のユーザデバイスから受信し、前記環境マップを要求するユーザデバイスと関連付けられるエリア識別子を決定し、少なくとも部分的に、前記エリア識別子に基づいて、環境マップのセットを前記マップデータベースから識別し、環境マップのセットをフィルタリングし、前記フィルタリングされた環境マップのセットを前記ユーザデバイスに伝送することと
を行い、
環境マップのセットをフィルタリングすることは、そこから前記環境マップのための要求が生じた、ユーザデバイスによって検出された無線ネットワークのパラメータと、環境マップのセット内の環境マップのための前記マップデータベース内の無線ネットワークのパラメータとの類似性に基づく、
非一過性コンピュータ記憶媒体と
を備える、クラウドコンピューティング環境。
(項目60)
前記コンピュータ実行可能命令はさらに、前記クラウドコンピューティング環境内の少なくとも1つのプロセッサによって実行されると、追跡マップを環境マップを要求するユーザデバイスから受信するように構成され、
環境マップのセットをフィルタリングすることはさらに、前記追跡マップおよび環境マップのセットの環境マップのコンテンツを表すメトリックの類似性に基づく、
項目59に記載のクラウドコンピューティング環境。
(項目61)
前記コンピュータ実行可能命令はさらに、前記クラウドコンピューティング環境内の少なくとも1つのプロセッサによって実行されると、追跡マップを環境マップを要求するユーザデバイスから受信するように構成され、
環境マップのセットをフィルタリングすることはさらに、前記追跡マップの一部と環境マップのセットの環境マップの一部との間のマッチング度に基づく、
項目59に記載のクラウドコンピューティング環境。
(項目62)
前記無線ネットワークのパラメータは、それに前記ユーザデバイスが接続されるネットワークの基本サービスセット識別子(BSSID)を備える、項目59に記載のクラウドコンピューティング環境。
(項目63)
無線ネットワークのパラメータの類似性に基づいて、環境マップのセットをフィルタリングすることは、前記環境マップを要求するユーザデバイスと関連付けられるユーザデータベース内に記憶される複数のBSSIDと、前記環境マップのセットの環境マップと関連付けられるマップデータベース内に記憶されるBSSIDとの類似性を算出することを含む、項目62に記載のクラウドコンピューティング環境。
(項目64)
前記エリア識別子は、経度および緯度によって、地理的場所を示す、項目59に記載のクラウドコンピューティング環境。
(項目65)
エリア識別子を決定することは、前記ユーザデータベースからのエリア識別子にアクセスすることを含む、項目59に記載のクラウドコンピューティング環境。
(項目66)
エリア識別子を決定することは、前記複数のユーザデバイスから受信されたメッセージ内のエリア識別子を受信することを含む、項目59に記載のクラウドコンピューティング環境。
(項目67)
前記無線ネットワークのパラメータは、Wi-Fiおよび5GNRを含むプロトコルに準拠する、項目59に記載のクラウドコンピューティング環境。
(項目68)
前記コンピュータ実行可能命令はさらに、前記クラウドコンピューティング環境内の少なくとも1つのプロセッサによって実行されると、追跡マップをユーザデバイスから受信するように構成され、
環境マップのセットをフィルタリングすることはさらに、前記追跡マップの一部と環境マップのセットの環境マップの一部との間のマッチング度に基づく、
項目59に記載のクラウドコンピューティング環境。
(項目69)
前記コンピュータ実行可能命令はさらに、前記クラウドコンピューティング環境内の少なくとも1つのプロセッサによって実行されると、
追跡マップをユーザデバイスから受信し、前記追跡マップを供給するユーザデバイスに基づいて、前記追跡マップと関連付けられるエリア識別子を決定することと、
少なくとも部分的に、前記追跡マップと関連付けられるエリア識別子に基づいて、第2の環境マップのセットを前記マップデータベースから選択することと、
前記受信された追跡マップに基づいて、前記マップデータベースを更新することであって、前記更新することは、前記受信された追跡マップと前記第2の環境マップのセット内の1つ以上の環境マップをマージすることを含む、ことと
を行うように構成される、項目59に記載のクラウドコンピューティング環境。
(項目70)
前記コンピュータ実行可能命令はさらに、前記クラウドコンピューティング環境内の少なくとも1つのプロセッサによって実行されると、前記受信された追跡マップの一部と前記第2の環境マップのセットの環境マップの一部との間のマッチング度に基づいて、前記第2の環境マップのセットをフィルタリングするように構成され、
前記追跡マップと前記第2の環境マップのセット内の1つ以上の環境マップをマージすることは、前記追跡マップと前記フィルタリングされた第2の環境マップのセット内の1つ以上の環境マップをマージすることを含む、
項目69に記載のクラウドコンピューティング環境。
PCF共有
(項目71)
XRシステムであって、
実世界オブジェクトの複数の表面を検出する実オブジェクト検出デバイスと、
アンカ識別システムであって、前記アンカ識別システムは、前記実オブジェクト検出デバイスに接続され、前記実世界オブジェクトに基づいてマップを生成する、アンカ識別システムと、
PCF生成システムであって、前記PCF生成システムは、前記マップに基づいて、第1のPCFを生成し、前記第1のPCFと前記マップを関連付ける、PCF生成システムと、
第1および第2の記憶媒体であって、前記第1および第2の記憶媒体は、それぞれ、第1および第2のXRデバイス上にある、第1および第2の記憶媒体と、
前記第1および第2のXRデバイスの少なくとも第1および第2のプロセッサであって、前記第1のPCFを、それぞれ、前記第1および第2のXRデバイスの第1および第2の記憶媒体内に記憶する、前記第1および第2のXRデバイスの少なくとも第1および第2のプロセッサと
を備える、XRシステム。
(項目72)
キーフレーム生成器であって、前記キーフレーム生成器は、複数のカメラ画像を複数の個別のキーフレームに変換するように、前記少なくとも1つのプロセッサによって実行可能である、キーフレーム生成器と、
持続姿勢計算機であって、前記持続姿勢計算機は、前記複数のキーフレームを平均することによって持続姿勢を生成するように、前記少なくとも1つのプロセッサによって実行可能である、持続姿勢計算機と、
追跡マップおよび持続姿勢変換器であって、前記追跡マップおよび持続姿勢変換器は、追跡マップを前記持続姿勢に変換し、前記追跡マップに対する原点における前記持続姿勢を決定するように、前記少なくとも1つのプロセッサによって実行可能である、追跡マップおよび持続姿勢変換器と、
持続姿勢およびPCF変換器であって、前記持続姿勢およびPCF変換器は、前記持続姿勢を前記第1のPCFに変換し、前記持続姿勢に対する前記第1のPCFを決定するように、前記少なくとも1つのプロセッサによって実行可能である、持続姿勢およびPCF変換器と、
PCFおよび画像データ変換器であって、前記PCFおよび画像データ変換器は、前記第1のPCFを画像データに変換するように、前記少なくとも1つのプロセッサによって実行可能である、PCFおよび画像データ変換器と、
前記第1のPCFに対する前記画像データを前記ユーザに表示するディスプレイデバイスと
をさらに備える、項目71に記載のXRシステム。
(項目73)
前記検出デバイスは、前記第1のXRデバイスプロセッサに接続される前記第1のXRデバイスの検出デバイスである、項目71に記載のXRシステム。
(項目74)
前記マップは、前記第1のXRデバイス上の第1のマップであり、前記第1のマップを生成するプロセッサは、前記第1のXRデバイスの第1のXRデバイスプロセッサである、項目72に記載のXRシステム。
(項目75)
前記第1のPCFを生成するプロセッサは、前記第1のXRデバイスの第1のXRデバイスプロセッサである、項目74に記載のXRシステム。
(項目76)
前記第1のPCFと前記第1のマップを関連付けるプロセッサは、前記第1のXRデバイスの第1のXRデバイスプロセッサである、項目75に記載のXRシステム。
(項目77)
前記第1のXRデバイスプロセッサによって実行可能であるアプリケーションと、
第1のPCF追跡器であって、前記第1のPCF追跡器は、前記第1のXRデバイスプロセッサによって実行可能であり、前記第1のPCF追跡器を前記アプリケーションからオンに切り替えるためのオンプロンプトを含み、前記第1のPCF追跡器は、前記第1のPCF追跡器がオンに切り替えられる場合のみ、前記第1のPCFを生成する、第1のPCF追跡器と
をさらに備える、項目76に記載のXRシステム。
(項目78)
前記第1のPCF追跡器は、前記第1のPCF追跡器を前記アプリケーションからオフに切り替えるためのオフプロンプトを有し、前記第1のPCF追跡器は、前記第1のPCF追跡器がオフに切り替えられると、第1のPCF生成を終了すること
をさらに含む、項目77に記載のXRシステム。
(項目79)
マップ発行器であって、前記マップ発行器は、前記第1のPCFをサーバに伝送するように、前記第1のXRデバイスプロセッサによって実行可能である、マップ発行器と、
マップ記憶ルーチンであって、前記マップ記憶ルーチンは、前記第1のPCFを前記サーバの記憶デバイス上に記憶するように、前記サーバのサーバプロセッサによって実行可能である、マップ記憶ルーチンと、
前記サーバのサーバプロセッサを用いて、前記第1のPCFを前記第2のXRデバイスに伝送することと、
マップダウンロードシステムであって、前記マップダウンロードシステムは、前記第1のPCFを前記サーバからダウンロードするように、前記第2のXRデバイスの第2のXRデバイスプロセッサによって実行可能である、マップダウンロードシステムと
をさらに備える、項目76に記載のXRシステム。
(項目80)
前記第2のXRデバイスプロセッサによって実行可能であるアプリケーションと、
第2のPCF追跡器であって、前記第2のPCF追跡器は、前記第2のXRデバイスプロセッサによって実行可能であり、前記第2のPCF追跡器を前記アプリケーションからオンに切り替えるためのオンプロンプトを含み、前記第2のPCF追跡器は、前記第2のPCF追跡器がオンに切り替えられる場合のみ、第2のPCFを生成する、第2のPCF追跡器と
をさらに備える、項目79に記載のXRシステム。
(項目81)
前記第2のPCF追跡器は、前記第2のPCF追跡器を前記アプリケーションからオフに切り替えるためのオフプロンプトを有し、前記第2のPCF追跡器は、前記第2のPCF追跡器がオフに切り替えられると、第2のPCF生成を終了すること
をさらに含む、項目80に記載のXRシステム。
(項目82)
マップ発行器をさらに備え、前記マップ発行器は、前記第2のPCFを前記サーバに伝送するように、前記第2のXRデバイスプロセッサによって実行可能である、項目79に記載のXRシステム。
(項目83)
持続姿勢入手器であって、前記持続姿勢入手器は、持続姿勢を前記サーバからダウンロードするように、前記第1のXRデバイスプロセッサによって実行可能である、持続姿勢入手器と、
PCF確認器であって、前記PCF確認器は、前記持続姿勢に基づいて、PCFを前記第1のXRデバイスの第1の記憶デバイスから読み出すように、前記第1のXRデバイスプロセッサによって実行可能である、PCF確認器と、
座標フレーム計算機であって、前記座標フレーム計算機は、前記第1の記憶デバイスから読み出された前記PCFに基づいて、座標フレームを計算するように、前記第1のXRデバイスプロセッサによって実行可能である、座標フレーム計算機と
をさらに備える、項目76に記載のXRシステム。
(項目84)
視認方法であって、
少なくとも1つの検出デバイスを用いて、実世界オブジェクトの複数の表面を検出することと、
少なくとも1つのプロセッサを用いて、前記実世界オブジェクトに基づいて、マップを生成することと、
少なくとも1つのプロセッサを用いて、前記マップに基づいて、第1のPCFを生成することと、
前記少なくとも1つのプロセッサを用いて、前記第1のPCFと前記マップを関連付けることと、
第1および第2のXRデバイスの少なくとも第1および第2のプロセッサを用いて、前記第1のPCFを、それぞれ、前記第1および第2のXRデバイスの第1および第2の記憶媒体内に記憶することと
を含む、方法。
(項目85)
前記少なくとも1つのプロセッサを用いて、複数のカメラ画像を複数の個別のキーフレームに変換することと、
前記少なくとも1つのプロセッサを用いて、前記複数のキーフレームを平均することによって、持続姿勢を生成することと、
前記少なくとも1つのプロセッサを用いて、追跡マップを前記持続姿勢に変換し、前記追跡マップに対する原点における前記持続姿勢を決定することと、
前記少なくとも1つのプロセッサによって、前記持続姿勢を前記第1のPCFに変換し、前記持続姿勢に対する前記第1のPCFを決定することと、
前記少なくとも1つのプロセッサを用いて、前記第1のPCFを画像データに変換することと、
ディスプレイデバイスを用いて、前記第1のPCFに対する前記画像データを前記ユーザに表示することと
をさらに含む、項目84に記載の視認方法。
(項目86)
前記検出デバイスは、前記第1のXRデバイスプロセッサに接続される前記第1のXRデバイスの検出デバイスである、項目84に記載の視認方法。
(項目87)
前記マップは、前記第1のXRデバイス上の第1のマップであり、前記第1のマップを生成するプロセッサは、前記第1のXRデバイスの第1のXRデバイスプロセッサである、項目85に記載の視認方法。
(項目88)
前記第1のPCFを生成するプロセッサは、前記第1のXRデバイスの第1のXRデバイスプロセッサである、項目87に記載の視認方法。
(項目89)
前記第1のPCFと前記第1のマップを関連付けるプロセッサは、前記第1のXRデバイスの第1のXRデバイスプロセッサである、項目88に記載の視認方法。
(項目90)
前記第1のXRデバイスプロセッサを用いて、アプリケーションを実行することと、
前記第1のXRデバイスプロセッサを用いて、前記アプリケーションからのオンプロンプトで、第1のPCF追跡器をオンに切り替えることであって、前記第1のPCF追跡器は、前記第1のPCF追跡器がオンに切り替えられる場合のみ、前記第1のPCFを生成する、ことと、
をさらに含む、項目89に記載の視認方法。
(項目91)
前記第1のXRデバイスプロセッサを用いて、前記アプリケーションからのオフプロンプトで、前記第1のPCF追跡器をオフに切り替えることであって、前記第1のPCF追跡器は、前記第1のPCF追跡器がオフに切り替えられると、第1のPCF生成を終了すること
をさらに含む、項目90に記載の視認方法。
(項目92)
前記第1のXRデバイスプロセッサを用いて、前記第1のPCFをサーバに伝送することと、
前記サーバのサーバプロセッサを用いて、前記第1のPCFを前記サーバの記憶デバイス上に記憶することと、
前記サーバのサーバプロセッサを用いて、前記第1のPCFを前記第2のXRデバイスに伝送することと、
前記第2のXRデバイスの第2のXRデバイスプロセッサを用いて、前記第1のPCFを前記サーバから受信することと
をさらに含む、項目89に記載の視認方法。
(項目93)
前記第2のXRデバイスプロセッサを用いて、アプリケーションを実行することと、
前記第2のXRデバイスプロセッサを用いて、前記アプリケーションからのオンプロンプトで、第2のPCF追跡器をオンに切り替えることであって、前記第2のPCF追跡器は、前記第2のPCF追跡器がオンに切り替えられる場合のみ、第2のPCFを生成する、ことと
をさらに含む、項目92に記載の視認方法。
(項目94)
前記第1のXRデバイスプロセッサを用いて、前記アプリケーションからのオフプロンプトで、前記第2のPCF追跡器をオフに切り替えることであって、前記第2のPCF追跡器は、前記第2のPCF追跡器がオフに切り替えられると、第2のPCF生成を終了すること
をさらに含む、項目93に記載の視認方法。
(項目95)
前記第2のXRデバイスプロセッサを用いて、前記第2のPCFを前記サーバにアップロードすること
をさらに含む、項目92に記載の視認方法。
(項目96)
前記第1のXRデバイスプロセッサを用いて、持続姿勢を前記サーバから決定することと、
前記第1のXRデバイスプロセッサを用いて、前記持続姿勢に基づいて、PCFを前記第1のXRデバイスの第1の記憶デバイスから読み出すことと、
前記第1のXRデバイスプロセッサを用いて、前記第1の記憶デバイスから読み出された前記PCFに基づいて、座標フレームを計算することと
をさらに含む、項目89に記載の視認方法。
PCFダウンロード
(項目97)
XRシステムであって、
第1のXRデバイスであって、
第1のXRデバイスプロセッサと、
前記第1のXRデバイスプロセッサに接続される第1のXRデバイス記憶デバイスと、
前記第1のXRデバイスプロセッサ上の命令のセットであって、
ダウンロードシステムであって、前記ダウンロードシステムは、持続姿勢をサーバからダウンロードするように、前記第1のXRデバイスプロセッサによって実行可能である、ダウンロードシステムと、
PCF読出器であって、前記PCF読出器は、前記持続姿勢に基づいて、PCFを前記第1のXRデバイスの第1の記憶デバイスから読み出すように、前記第1のXRデバイスプロセッサによって実行可能である、PCF読出器と、
座標フレーム計算機であって、前記座標フレーム計算機は、前記第1の記憶デバイスから読み出された前記PCFに基づいて、座標フレームを計算するように、前記第1のXRデバイスプロセッサによって実行可能である、座標フレーム計算機と
を含む、命令のセットと
を含む、第1のXRデバイス
を備える、XRシステム。
(項目98)
視認方法であって、
第1のXRデバイスの第1のXRデバイスプロセッサを用いて、持続姿勢をサーバからダウンロードすることと、
前記第1のXRデバイスプロセッサを用いて、前記持続姿勢に基づいて、PCFを前記第1のXRデバイスの第1の記憶デバイスから読み出すことと、
前記第1のXRデバイスプロセッサを用いて、前記第1の記憶デバイスから読み出された前記PCFに基づいて、座標フレームを計算することと
を含む、方法。
PCFサーバ
(項目99)
視認方法であって、
サーバであって、
サーバプロセッサと、
前記サーバプロセッサに接続されるサーバ記憶デバイスと、
マップ記憶ルーチンであって、前記マップ記憶ルーチンは、マップと関連付けられた前記第1のPCFを前記サーバのサーバ記憶デバイス上に記憶するように、前記サーバのサーバプロセッサを用いて実行可能である、マップ記憶ルーチンと、
マップ伝送機であって、前記マップ伝送機は、前記サーバプロセッサを用いて、前記マップおよび前記第1のPCFを第1のXRデバイスに伝送するように、サーバプロセッサを用いて実行可能である、マップ伝送機と
を含む、サーバ
を備える、方法。
(項目100)
視認方法であって、
前記サーバのサーバプロセッサを用いて、マップと関連付けられた前記第1のPCFを前記サーバのサーバ記憶デバイス上に記憶することと、
前記サーバのサーバプロセッサを用いて、前記マップおよび前記第1のPCFを第1のXRデバイスに伝送することと
を含む、方法。
頭部姿勢復元およびリセット
(項目101)
視認方法であって、
XRデバイスのプロセッサによって、ユーザの頭部に固着される頭部搭載型フレーム上の捕捉デバイスを用いて、環境の表面を捕捉し、前記表面に対する前記頭部搭載型フレームの配向を決定することによって、頭部姿勢の追跡に入ることと、
前記プロセッサによって、前記表面に対する前記頭部搭載型フレームの配向決定不能に起因して、頭部姿勢が喪失されたかどうかを決定することと、
頭部姿勢が、喪失された場合、前記プロセッサによって、姿勢復元モードに入り、前記表面に対する前記頭部搭載型フレームの配向を決定することによって、前記頭部姿勢を確立することと
を含む、方法。
(項目102)
前記頭部姿勢が、喪失されていない場合、前記プロセッサによって、頭部姿勢の追跡に入る、項目101に記載の視認方法。
(項目103)
姿勢復元は、
前記プロセッサによって、表面の捕捉を改良するための提案とともに、メッセージを前記ユーザに表示することを含む、
項目101に記載の視認方法。
(項目104)
前記提案は、光を増加させることおよびテクスチャを精緻化することのうちの少なくとも1つである、項目103に記載の視認方法。
(項目105)
前記プロセッサによって、復元が失敗したかどうかを決定することと、
復元が、失敗した場合、前記プロセッサによって、頭部姿勢を確立することを含む新しいセッションを開始することと
をさらに含む、項目101に記載の視認方法。
(項目106)
プロセッサによって、新しいセッションが開始されるであろうことのメッセージを前記ユーザに表示することをさらに含む、項目105に記載の視認方法。
(項目107)
頭部姿勢が、喪失されていない場合、前記プロセッサによって、頭部姿勢の追跡に入ることをさらに含む、項目101に記載の視認方法。
(項目108)
ユーザによって携行可能な電子システムであって、
場面内の1つ以上の物理的オブジェクトについての画像を捕捉するように構成される1つ以上のセンサであって、前記画像は、第1の座標フレーム内にある、1つ以上のセンサと、
コンピュータ実行可能命令を実行し、仮想コンテンツを前記場面内にレンダリングするように構成されるアプリケーションであって、前記アプリケーションは、前記仮想コンテンツの表示が、前記ユーザの頭部内の眼回転および/または前記1つ以上のセンサの変形から独立するように、仮想コンテンツを前記第1の座標フレームと異なる第2の座標フレーム内に表示する、アプリケーションと
を備える、電子システム。
(項目109)
前記第1の座標フレームは、世界原点を有する世界座標フレームであり、
前記世界原点は、前記電子システムが前記画像を捕捉するために電源投入されるときの前記電子システムの第1の姿勢である、
項目108に記載の電子システム。
(項目110)
前記第2の座標フレームは、カメラ原点を有するカメラ座標フレームであり、
前記カメラ原点は、少なくとも部分的に、前記電子システムの寸法と、前記画像を捕捉するときの前記電子システムの1つ以上のセンサの1つ以上の姿勢とに基づいて決定される、
項目108に記載の電子システム。
(項目111)
コンピュータ実行可能命令を実行し、前記仮想コンテンツを前記アプリケーションに提供するように構成される少なくとも1つのプロセッサであって、前記コンピュータ実行可能命令は、
少なくとも部分的に、前記場面内の1つ以上の物理的オブジェクトに基づいて、前記仮想コンテンツのためのローカル座標フレームを決定することと、
前記ローカル座標フレーム内の仮想コンテンツについての画像データを前記第2の座標フレーム内の仮想コンテンツについての画像データに変換することと
を行うための命令を備える、少なくとも1つのプロセッサ
を備える、項目108に記載の電子システム。
(項目112)
前記ローカル座標フレームは、少なくとも部分的に、前記仮想コンテンツを包囲するプリズムまたは境界ボックスの外側表面上の1つ以上のノードに基づいて決定される、項目108に記載の電子システム。
(項目113)
前記ローカル座標フレーム内の仮想コンテンツについての画像データを前記第2の座標フレーム内の仮想コンテンツについての画像データに変換することは、
前記ローカル座標フレーム内の仮想コンテンツについての画像データを前記第1の座標フレーム内の仮想コンテンツについての画像データに変換することと、
前記第1の座標フレーム内の仮想コンテンツについての画像データを前記第2の座標フレーム内の仮想コンテンツについての画像データに変換することと
を含む、項目111に記載の電子システム。
(項目114)
前記第1の座標フレーム内の仮想コンテンツについての画像データを前記第2の座標フレーム内の仮想コンテンツについての画像データに変換することは、
前記第1の座標フレーム内の仮想コンテンツについての画像データを頭部座標フレーム内の仮想コンテンツについての画像データに変換することと、
前記頭部座標フレーム内の仮想コンテンツについての画像データを前記第2の座標フレーム内の仮想コンテンツについての画像データに変換することと
を含み、
前記頭部座標フレームは、少なくとも部分的に、前記画像を捕捉するときの前記電子システムの1つ以上のセンサの1つ以上の姿勢に基づいて決定された頭部原点を有する、
項目111に記載の電子システム。
(項目115)
前記コンピュータ実行可能命令は、
前記PCFが、前記世界座標フレームと異なるが、それと関連付けられるように、少なくとも部分的に、前記場面内の前記1つ以上の物理的オブジェクトを中心として捕捉された画像に基づいて、持続座標フレーム(PCF)を決定するための命令
を備える、項目111に記載の電子システム。
(項目116)
コンピューティングシステムを動作させ、仮想オブジェクトを、1つ以上の物理的オブジェクトを備える場面内にレンダリングする方法であって、前記方法は、
前記場面を中心とする複数の画像をユーザによって装着される第1のデバイスの1つ以上のセンサから捕捉することと、
少なくとも部分的に、前記複数の画像に基づいて、1つ以上の持続姿勢を算出することと、
前記複数の画像の情報が、前記持続座標フレームを介して、前記第1のデバイスおよび/または第2のデバイス上で起動する1つ以上のアプリケーションによって、異なる時間にアクセスされ得るように、少なくとも部分的に、前記算出された1つ以上の持続姿勢に基づいて、持続座標フレームを生成することと
を含む、方法。
(項目117)
少なくとも部分的に、前記複数の画像に基づいて、前記1つ以上の持続姿勢を算出することは、
1つ以上の特徴を前記複数の画像のそれぞれから抽出することと、
前記1つ以上の特徴毎に、記述子を生成することと、
少なくとも部分的に、前記記述子に基づいて、前記複数の画像毎に、キーフレームを生成することと、
少なくとも部分的に、前記1つ以上のキーフレームに基づいて、前記1つ以上の持続姿勢を生成することと
を含む、項目116に記載の方法。
(項目118)
少なくとも部分的に、前記算出された1つ以上の持続姿勢に基づいて、前記持続座標フレームを生成することは、
前記第1のデバイスが前記複数の画像が捕捉された場所から所定の距離を進行すると、前記持続座標フレームを生成すること
を含む、項目116に記載の方法。
(項目119)
前記所定の距離は、前記デバイスの算出リソースの消費および前記仮想オブジェクトの設置誤差の両方が、前記1つ以上の持続姿勢を生成するために制御されるように、2~20メートルである、項目118に記載の方法。
(項目120)
前記第1のデバイスが電源投入されると、初期持続姿勢を生成することと、
前記第1のデバイスが、円形の中心としての前記初期持続姿勢および閾値距離に等しい半径を伴う、円形の周に到達すると、前記第1のデバイスの現在の場所において第1の持続姿勢を生成することと
を含む、項目117に記載の方法。
(項目121)
前記円形は、第1の円形であり、
前記方法はさらに、前記デバイスが、円形の中心としての前記第1の持続姿勢および前記閾値距離の2倍に等しい半径を伴う第2の円形の周に到達すると、前記第1のデバイスの現在の場所で第2の持続姿勢を生成することを含む、
項目120に記載の方法。
(項目122)
前記第1のデバイスが、既存の持続姿勢を前記第1のデバイスの現在の位置からの前記閾値距離内に見出すとき、前記第1の持続姿勢は、生成されない、項目120に記載の方法。
(項目123)
前記第1のデバイスは、前記第1の持続姿勢に、前記第1の持続姿勢までの所定の距離内にある前記複数のキーフレームのうちの1つ以上のものを結び付ける、項目120に記載の方法。
(項目124)
前記第1のデバイス上で起動するアプリケーションが持続姿勢を要求しないとき、前記第1の持続姿勢は、生成されない、項目120に記載の方法。
(項目125)
ユーザによって携行可能な電子システムであって、
場面内の1つ以上の物理的オブジェクトについての画像を捕捉するように構成される1つ以上のセンサと、
コンピュータ実行可能命令を実行し、仮想コンテンツを前記場面内にレンダリングするように構成されるアプリケーションと、
コンピュータ実行可能命令を実行し、前記仮想コンテンツについての画像データを前記アプリケーションに提供するように構成される少なくとも1つのプロセッサであって、前記コンピュータ実行可能命令は、
少なくとも部分的に、前記捕捉された画像に基づいて、持続座標フレームを生成するための命令を備える、
少なくとも1つのプロセッサと
を備える、電子システム。
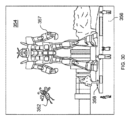
図6は、いくつかの実施形態による、第1のXRデバイス12.1と、第2のXRデバイス12.2およびサーバ20の視覚データおよびアルゴリズムとをさらに詳細に図示する。図示されないが、第1のXRデバイス12.1は、第2のXRデバイス12.2と同一に構成されてもよい。
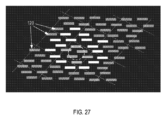
図27は、サーバ20のコンピュータ可読媒体上のデータ記憶装置内に記憶される、複数の規準マップ120を示す。各規準マップ120は、それと関連付けられる複数の規準マップ識別子を有する。これらの規準マップ識別子は、経度および緯度の範囲によって表される、惑星である地球上のエリアを含む。規準マップ識別子はまた、グローバル特徴列を含む。
本明細書に説明されるものは、複数の環境マップ(例えば、規準マップ)をXリアリティ(XR)システム内でランク付けおよびマージするための方法および装置である。現実的XR体験をユーザに提供するために、XRシステムは、実オブジェクトに関連して仮想オブジェクトの場所を正しく相関させるために、ユーザの物理的周囲を把握しなければならない。ユーザの物理的周囲についての情報は、ユーザの場所に関する環境マップから取得されてもよい。環境マップは、XRシステムのユーザによって装着されるXRデバイスの一部である、センサを用いて収集された画像および深度情報から作成されてもよい。環境マップは、種々の場所および時間においてシステムのユーザによって装着されるセンサによって収集された情報を用いて構築されてもよい。各環境マップは、それぞれ、環境内の実オブジェクトの3次元(3D)世界再構築物と関連付けられる、マッピングされた点を含んでもよい。
頭部姿勢追跡復元およびリセット
Claims (18)
- 電子システムであって、
電子デバイスであって、前記電子デバイスは、
プロセッサと、
前記プロセッサに接続されるコンピュータ可読媒体であって、前記コンピュータ可読媒体は、第1の座標フレームと、前記第1の座標フレームと異なる第2の座標フレームとを備える、コンピュータ可読媒体と、
仮想コンテンツを表すデータを受信するデータチャネルであって、前記プロセッサは、前記仮想コンテンツの位置付けを前記第1の座標フレームから前記第2の座標フレームに変換するように、座標フレーム変換器を実行するように構成される、データチャネルと、
前記第2の座標フレーム内の前記仮想コンテンツの位置付けに少なくとも部分的に基づいて、前記仮想コンテンツを表示するように適合されるディスプレイシステムと
を含む、電子デバイス
を備え、
前記コンピュータ可読媒体は、頭部搭載可能フレームに対して移動する眼の複数の眼位置を含むカメラ座標フレームをさらに含み、
前記座標フレーム変換器は、頭部座標フレームを前記カメラ座標フレームに変換することを含む、電子システム。 - 前記電子デバイスは、オブジェクトの位置付けを検出するオブジェクト検出デバイスをさらに含み、
前記プロセッサは、
前記オブジェクトの表面上の少なくとも1つの点の位置付けを識別する世界表面決定ルーチンと、
前記少なくとも1つの点に基づいて世界座標フレームを算出する世界フレーム決定ルーチンと、
前記世界座標フレームを前記コンピュータ可読媒体上に記憶する世界フレーム記憶命令と
を実行するようにさらに構成される、請求項1に記載の電子システム。 - 前記オブジェクト検出デバイスは、カメラである、請求項2に記載の電子システム。
- 前記オブジェクト検出デバイスは、複数のオブジェクトの位置付けを検出する、請求項2に記載の電子システム。
- 前記世界表面決定ルーチンは、前記オブジェクトの表面上の複数の点の位置付けを識別する、請求項2に記載の電子システム。
- 前記世界フレーム決定ルーチンは、前記複数の点に基づいて、前記世界座標フレームを算出する、請求項5に記載の電子システム。
- 電子システムであって、
電子デバイスであって、前記電子デバイスは、
プロセッサと、
前記プロセッサに接続されるコンピュータ可読媒体であって、前記コンピュータ可読媒体は、第1の座標フレームと、前記第1の座標フレームと異なる第2の座標フレームとを備える、コンピュータ可読媒体と、
仮想コンテンツを表すデータを受信するデータチャネルであって、前記プロセッサは、前記仮想コンテンツの位置付けを前記第1の座標フレームから前記第2の座標フレームに変換するように、座標フレーム変換器を実行するように構成される、データチャネルと、
前記第2の座標フレーム内の前記仮想コンテンツの位置付けに少なくとも部分的に基づいて、前記仮想コンテンツを表示するように適合されるディスプレイシステムと
を含む、電子デバイスと、
オブジェクトの位置付けを検出するオブジェクト検出デバイスと、
頭部搭載可能フレームと
を備え、
前記プロセッサは、
前記オブジェクトの表面上の少なくとも1つの点の位置付けを識別する世界表面決定ルーチンと、
前記少なくとも1つの点に基づいて世界座標フレームを算出する世界フレーム決定ルーチンと、
前記世界座標フレームを前記コンピュータ可読媒体上に記憶する世界フレーム記憶命令と
を実行するようにさらに構成され、
前記プロセッサは、
前記頭部搭載可能フレームの移動に応じて変化する頭部座標フレームを算出する頭部フレーム決定ルーチンと、
前記頭部座標フレームを前記コンピュータ可読媒体上に記憶する頭部フレーム記憶命令と
を実行するようにさらに構成される、電子システム。 - 前記座標フレーム変換器は、前記世界座標フレームを前記頭部座標フレームに変換するように構成される、請求項7に記載の電子システム。
- 前記電子デバイスは、前記第1の頭部搭載可能フレームに固着され、前記頭部搭載可能フレームの移動を検出する慣性測定ユニットをさらに含み、前記頭部フレーム決定ルーチンは、前記慣性測定ユニットの測定に基づいて、前記頭部座標フレームを算出する、請求項7に記載の電子システム。
- 前記電子デバイスは、前記頭部搭載可能フレームに固着される移動追跡カメラをさらに含み、
前記移動追跡カメラは、前記頭部搭載可能フレームの移動を検出し、
前記頭部フレーム決定ルーチンは、前記移動追跡カメラによって捕捉された画像に基づいて、前記頭部座標フレームを算出する、請求項7に記載の電子システム。 - 前記プロセッサは、
前記仮想コンテンツのローカル座標フレームを算出するローカルフレーム決定ルーチンと、
前記ローカル座標フレームを前記コンピュータ可読媒体上に記憶するローカルフレーム記憶命令と
を実行するように構成される、請求項2に記載の電子システム。 - 前記座標フレーム変換器は、前記ローカル座標フレームを前記世界座標フレームに変換することを含む、請求項11に記載の電子システム。
- ポータブルデバイスを備える3D環境内に仮想コンテンツをレンダリングするように電子システムを作動させる方法であって、前記方法は、1つ以上のプロセッサを用いて、
前記電子システムがセッションのために電源投入されるとき、前記電子システムの姿勢に少なくとも部分的に基づいて、第1の座標フレームを提供することと、
センサが前記3D環境についての情報を捕捉しているとき、前記電子システムの前記センサの姿勢に少なくとも部分的に基づいて、第2の座標フレームを提供することと、
前記仮想コンテンツを表すデータを取得することと、
前記仮想コンテンツの位置付けを前記第1の座標フレームから前記第2の座標フレームに変換することと、
前記第2の座標フレーム内の前記仮想コンテンツの位置付けを使用して、前記仮想コンテンツをレンダリングすることと
を含む、方法。 - 電子システムであって、
ユーザによって携行可能なデバイスであって、前記デバイスは、場面内の1つ以上の物理的オブジェクトについてのセンサデータを捕捉するように構成される1つ以上のセンサを備え、前記センサデータは、第1の座標フレーム内にある、デバイスと、
前記第1の座標フレーム内の前記センサデータから導出される情報に少なくとも部分的に基づいて、前記場面内に仮想コンテンツの場所を規定するためのコンピュータ実行可能命令を備えるアプリケーションであって、前記アプリケーションは、前記仮想コンテンツの表示が、眼位置、および/または、前記1つ以上のセンサの位置を変化させる前記ユーザによって携行可能な前記デバイスの変形から独立するように、前記第1の座標フレームと異なる第2の座標フレーム内に前記仮想コンテンツの場所を規定する、アプリケーションと、
付加的コンピュータ実行可能命令を実行し、前記仮想コンテンツを前記アプリケーションに提供するように構成される少なくとも1つのプロセッサと
を備え、
前記付加的コンピュータ実行可能命令は、
前記場面内の前記1つ以上の物理的オブジェクトに少なくとも部分的に基づいて、前記第1の座標フレームを決定することと、
前記第2の座標フレーム内の前記仮想コンテンツの前記規定された場所を前記第1の座標フレームに変換することと
を行うための命令を備える、電子システム。 - 電子システムであって、
ユーザによって携行可能なデバイスであって、前記デバイスは、場面内の1つ以上の物理的オブジェクトについてのセンサデータを捕捉するように構成される1つ以上のセンサを備え、前記センサデータは、第1の座標フレーム内にある、デバイスと、
前記第1の座標フレーム内の前記センサデータから導出される情報に少なくとも部分的に基づいて、前記場面内に仮想コンテンツの場所を規定するためのコンピュータ実行可能命令を備えるアプリケーションであって、前記アプリケーションは、前記仮想コンテンツの表示が、眼位置、および/または、前記1つ以上のセンサの位置を変化させる前記ユーザによって携行可能な前記デバイスの変形から独立するように、前記第1の座標フレームと異なる第2の座標フレーム内に前記仮想コンテンツの場所を規定する、アプリケーションと
を備え、
前記第1の座標フレームは、前記電子システムが前記センサデータを捕捉するために電源投入されるときの前記電子システムの第1の姿勢である、電子システム。 - 電子システムであって、
ユーザによって携行可能なデバイスであって、前記デバイスは、場面内の1つ以上の物理的オブジェクトについてのセンサデータを捕捉するように構成される1つ以上のセンサを備え、前記センサデータは、第1の座標フレーム内にある、デバイスと、
前記第1の座標フレーム内の前記センサデータから導出される情報に少なくとも部分的に基づいて、前記場面内に仮想コンテンツの場所を規定するためのコンピュータ実行可能命令を備えるアプリケーションであって、前記アプリケーションは、前記仮想コンテンツの表示が、眼位置、および/または、前記1つ以上のセンサの位置を変化させる前記ユーザによって携行可能な前記デバイスの変形から独立するように、前記第1の座標フレームと異なる第2の座標フレーム内に前記仮想コンテンツの場所を規定する、アプリケーションと
を備え、
前記第1の座標フレームは、前記電子システムの寸法と、前記センサデータを捕捉するときの前記電子システムの1つ以上のセンサの1つ以上の姿勢とに少なくとも部分的に基づいて決定される原点を有する、電子システム。 - 前記第1の座標フレームは、前記仮想コンテンツを包囲する境界ボックスの外側表面上の1つ以上のノードに少なくとも部分的に基づいて決定される、請求項14に記載の電子システム。
- 前記第1の座標フレーム内の前記センサデータから導出される情報に少なくとも部分的に基づいて、前記場面内に前記仮想コンテンツの場所を規定することは、前記アプリケーションによって使用される座標フレーム内の前記ユーザによって携行可能な前記デバイスの場所を決定することを含む、請求項14に記載の電子システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023193577A JP2024009071A (ja) | 2018-08-13 | 2023-11-14 | クロスリアリティシステム |
Applications Claiming Priority (15)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862718357P | 2018-08-13 | 2018-08-13 | |
| US62/718,357 | 2018-08-13 | ||
| US201862742237P | 2018-10-05 | 2018-10-05 | |
| US62/742,237 | 2018-10-05 | ||
| US201962812935P | 2019-03-01 | 2019-03-01 | |
| US62/812,935 | 2019-03-01 | ||
| US201962815955P | 2019-03-08 | 2019-03-08 | |
| US62/815,955 | 2019-03-08 | ||
| US201962868786P | 2019-06-28 | 2019-06-28 | |
| US62/868,786 | 2019-06-28 | ||
| US201962870954P | 2019-07-05 | 2019-07-05 | |
| US62/870,954 | 2019-07-05 | ||
| US201962884109P | 2019-08-07 | 2019-08-07 | |
| US62/884,109 | 2019-08-07 | ||
| PCT/US2019/046240 WO2020036898A1 (en) | 2018-08-13 | 2019-08-12 | A cross reality system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023193577A Division JP2024009071A (ja) | 2018-08-13 | 2023-11-14 | クロスリアリティシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021534491A JP2021534491A (ja) | 2021-12-09 |
| JPWO2020036898A5 JPWO2020036898A5 (ja) | 2022-08-12 |
| JP7445642B2 true JP7445642B2 (ja) | 2024-03-07 |
Family
ID=69525776
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021507660A Active JP7445642B2 (ja) | 2018-08-13 | 2019-08-12 | クロスリアリティシステム |
| JP2023193577A Pending JP2024009071A (ja) | 2018-08-13 | 2023-11-14 | クロスリアリティシステム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023193577A Pending JP2024009071A (ja) | 2018-08-13 | 2023-11-14 | クロスリアリティシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US10957112B2 (ja) |
| EP (1) | EP3837674A4 (ja) |
| JP (2) | JP7445642B2 (ja) |
| CN (1) | CN112805750A (ja) |
| WO (1) | WO2020036898A1 (ja) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10140392B1 (en) | 2017-06-29 | 2018-11-27 | Best Apps, Llc | Computer aided systems and methods for creating custom products |
| US10254941B2 (en) | 2017-06-29 | 2019-04-09 | Best Apps, Llc | Computer aided systems and methods for creating custom products |
| CN112805750A (zh) * | 2018-08-13 | 2021-05-14 | 奇跃公司 | 跨现实系统 |
| US11227435B2 (en) | 2018-08-13 | 2022-01-18 | Magic Leap, Inc. | Cross reality system |
| CN113196209A (zh) | 2018-10-05 | 2021-07-30 | 奇跃公司 | 在任何位置渲染位置特定的虚拟内容 |
| US10922449B2 (en) | 2018-11-21 | 2021-02-16 | Best Apps, Llc | Computer aided systems and methods for creating custom products |
| US11625806B2 (en) * | 2019-01-23 | 2023-04-11 | Qualcomm Incorporated | Methods and apparatus for standardized APIs for split rendering |
| GB2582657B (en) * | 2019-03-29 | 2021-09-15 | Sony Interactive Entertainment Inc | User tracking system using a camera mounted on the user and an external camera |
| US11748445B1 (en) * | 2019-04-30 | 2023-09-05 | Apple Inc. | Techniques for managing feature maps |
| US11470017B2 (en) * | 2019-07-30 | 2022-10-11 | At&T Intellectual Property I, L.P. | Immersive reality component management via a reduced competition core network component |
| JP7207549B2 (ja) * | 2019-07-31 | 2023-01-18 | 日本電信電話株式会社 | 複合現実空間共有システム、サーバ、複合現実端末、複合現実空間共有方法および共有情報管理プログラム |
| JP2022551735A (ja) | 2019-10-15 | 2022-12-13 | マジック リープ, インコーポレイテッド | 無線フィンガプリントを用いたクロスリアリティシステム |
| JP2022551734A (ja) | 2019-10-15 | 2022-12-13 | マジック リープ, インコーポレイテッド | 複数のデバイスタイプをサポートするクロスリアリティシステム |
| JP2022551733A (ja) | 2019-10-15 | 2022-12-13 | マジック リープ, インコーポレイテッド | 位置特定サービスを伴うクロスリアリティシステム |
| CN114730546A (zh) | 2019-11-12 | 2022-07-08 | 奇跃公司 | 具有定位服务和基于位置的共享内容的交叉现实系统 |
| US11562542B2 (en) | 2019-12-09 | 2023-01-24 | Magic Leap, Inc. | Cross reality system with simplified programming of virtual content |
| US11816757B1 (en) * | 2019-12-11 | 2023-11-14 | Meta Platforms Technologies, Llc | Device-side capture of data representative of an artificial reality environment |
| WO2021156977A1 (ja) * | 2020-02-05 | 2021-08-12 | マクセル株式会社 | 空間認識システム、空間認識方法、情報端末、およびサーバ装置 |
| US11830149B2 (en) | 2020-02-13 | 2023-11-28 | Magic Leap, Inc. | Cross reality system with prioritization of geolocation information for localization |
| WO2021163306A1 (en) | 2020-02-13 | 2021-08-19 | Magic Leap, Inc. | Cross reality system with accurate shared maps |
| JP2023514208A (ja) | 2020-02-13 | 2023-04-05 | マジック リープ, インコーポレイテッド | マルチ分解能フレーム記述子を使用したマップ処理を伴うクロスリアリティシステム |
| CN115461787A (zh) | 2020-02-26 | 2022-12-09 | 奇跃公司 | 具有快速定位的交叉现实系统 |
| WO2021178221A1 (en) | 2020-03-03 | 2021-09-10 | Best Apps, Llc | Computer aided systems and methods for creating custom products |
| US11688073B2 (en) * | 2020-04-14 | 2023-06-27 | Samsung Electronics Co., Ltd. | Method and system for depth map reconstruction |
| US11900547B2 (en) | 2020-04-29 | 2024-02-13 | Magic Leap, Inc. | Cross reality system for large scale environments |
| US11514203B2 (en) * | 2020-05-18 | 2022-11-29 | Best Apps, Llc | Computer aided systems and methods for creating custom products |
| CN111815779A (zh) * | 2020-06-29 | 2020-10-23 | 浙江商汤科技开发有限公司 | 对象展示方法及装置、定位方法及装置以及电子设备 |
| SE2030252A1 (en) * | 2020-08-13 | 2022-02-14 | Nagoon AB | Method performed by a computer system for creation of augmented reality experiences and connection of these to the real world |
| CN114190922B (zh) * | 2020-09-18 | 2023-04-21 | 四川大学 | Tms头动检测方法 |
| EP4226334A1 (en) * | 2020-10-06 | 2023-08-16 | Nokia Technologies Oy | Network-based spatial computing for extended reality (xr) applications |
| EP4015996A1 (en) * | 2020-12-17 | 2022-06-22 | Siemens Aktiengesellschaft | Method for generating a map for augmented reality devices in an industrial facility |
| US11615594B2 (en) | 2021-01-21 | 2023-03-28 | Samsung Electronics Co., Ltd. | Systems and methods for reconstruction of dense depth maps |
| JPWO2023026700A1 (ja) * | 2021-08-26 | 2023-03-02 | ||
| WO2023052485A1 (en) * | 2021-09-30 | 2023-04-06 | Siemens Aktiengesellschaft | Processing a picture section with an augmented reality device |
| EP4160521A1 (en) * | 2021-09-30 | 2023-04-05 | Siemens Aktiengesellschaft | Processing a picture section with an augmented reality device |
| WO2023102552A1 (en) * | 2021-12-03 | 2023-06-08 | Hover Inc. | System and methods for validating imagery pipelines |
| US11682180B1 (en) * | 2021-12-09 | 2023-06-20 | Qualcomm Incorporated | Anchoring virtual content to physical surfaces |
| WO2024010220A1 (ko) * | 2022-07-06 | 2024-01-11 | 삼성전자 주식회사 | 거리 센서 활성화 방법 및 전자 장치 |
| EP4336458A1 (de) * | 2022-09-08 | 2024-03-13 | Viewlicity GmbH | Verfahren und systeme zum betreiben einer anzeigeeinrichtung einer simulation |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110254950A1 (en) | 2008-10-09 | 2011-10-20 | Isis Innovation Limited | Visual tracking of objects in images, and segmentation of images |
| JP2013141049A (ja) | 2010-03-24 | 2013-07-18 | Hitachi Ltd | 世界座標系データベースを利用したサーバ及び端末 |
| US20140267234A1 (en) | 2013-03-15 | 2014-09-18 | Anselm Hook | Generation and Sharing Coordinate System Between Users on Mobile |
| US20150049201A1 (en) | 2013-08-19 | 2015-02-19 | Qualcomm Incorporated | Automatic calibration of scene camera for optical see-through head mounted display |
| JP2015079490A (ja) | 2013-10-04 | 2015-04-23 | キヤノン株式会社 | フレームを選択する方法、装置、及びシステム |
| US20160148433A1 (en) | 2014-11-16 | 2016-05-26 | Eonite, Inc. | Systems and methods for augmented reality preparation, processing, and application |
| JP2017529635A (ja) | 2014-06-14 | 2017-10-05 | マジック リープ, インコーポレイテッドMagic Leap,Inc. | 仮想および拡張現実を作成する方法およびシステム |
Family Cites Families (157)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100483806B1 (ko) | 2002-07-18 | 2005-04-20 | 한국과학기술원 | 예제동작을 이용한 영상기반 동작복원방법 |
| US20050228849A1 (en) | 2004-03-24 | 2005-10-13 | Tong Zhang | Intelligent key-frame extraction from a video |
| US7542034B2 (en) | 2004-09-23 | 2009-06-02 | Conversion Works, Inc. | System and method for processing video images |
| US7583858B2 (en) | 2004-10-12 | 2009-09-01 | Eastman Kodak Company | Image processing based on direction of gravity |
| US20080303787A1 (en) | 2005-10-21 | 2008-12-11 | Zheng Yu Brian | Touch Screen Apparatus And Methods |
| CA2659672A1 (en) | 2006-06-26 | 2008-01-03 | Icosystem Corporation | Methods and systems for interactive customization of avatars and other animate or inanimate items in video games |
| US8781162B2 (en) | 2011-01-05 | 2014-07-15 | Ailive Inc. | Method and system for head tracking and pose estimation |
| US20080090659A1 (en) | 2006-10-12 | 2008-04-17 | Maximino Aguilar | Virtual world event notification from a persistent world game server in a logically partitioned game console |
| JP4292426B2 (ja) | 2007-05-15 | 2009-07-08 | ソニー株式会社 | 撮像装置および撮像データ補正方法 |
| US9448072B2 (en) | 2007-05-31 | 2016-09-20 | Trx Systems, Inc. | System and method for locating, tracking, and/or monitoring the status of personnel and/or assets both indoors and outdoors |
| US9812096B2 (en) | 2008-01-23 | 2017-11-07 | Spy Eye, Llc | Eye mounted displays and systems using eye mounted displays |
| US20100208033A1 (en) | 2009-02-13 | 2010-08-19 | Microsoft Corporation | Personal Media Landscapes in Mixed Reality |
| US8839121B2 (en) | 2009-05-06 | 2014-09-16 | Joseph Bertolami | Systems and methods for unifying coordinate systems in augmented reality applications |
| KR20100138725A (ko) | 2009-06-25 | 2010-12-31 | 삼성전자주식회사 | 가상 세계 처리 장치 및 방법 |
| US9119027B2 (en) | 2009-10-06 | 2015-08-25 | Facebook, Inc. | Sharing of location-based content item in social networking service |
| US8185596B2 (en) | 2010-02-22 | 2012-05-22 | Samsung Electronics Co., Ltd. | Location-based communication method and system |
| US8667487B1 (en) | 2010-05-18 | 2014-03-04 | Google Inc. | Web browser extensions |
| KR101686171B1 (ko) | 2010-06-08 | 2016-12-13 | 삼성전자주식회사 | 영상 및 거리 데이터를 이용한 위치 인식 장치 및 방법 |
| WO2012006578A2 (en) | 2010-07-08 | 2012-01-12 | The Regents Of The University Of California | End-to-end visual recognition system and methods |
| EP3654147A1 (en) | 2011-03-29 | 2020-05-20 | QUALCOMM Incorporated | System for the rendering of shared digital interfaces relative to each user's point of view |
| US8526368B2 (en) | 2011-05-17 | 2013-09-03 | Qualcomm Incorporated | Wi-Fi access point characteristics database |
| US20120314031A1 (en) | 2011-06-07 | 2012-12-13 | Microsoft Corporation | Invariant features for computer vision |
| US9082214B2 (en) | 2011-07-01 | 2015-07-14 | Disney Enterprises, Inc. | 3D drawing system for providing a real time, personalized, and immersive artistic experience |
| US10019962B2 (en) | 2011-08-17 | 2018-07-10 | Microsoft Technology Licensing, Llc | Context adaptive user interface for augmented reality display |
| WO2013029674A1 (en) | 2011-08-31 | 2013-03-07 | Metaio Gmbh | Method of matching image features with reference features |
| US8243102B1 (en) | 2011-10-12 | 2012-08-14 | Google Inc. | Derivative-based selection of zones for banded map display |
| US20130141419A1 (en) * | 2011-12-01 | 2013-06-06 | Brian Mount | Augmented reality with realistic occlusion |
| WO2013101753A1 (en) | 2011-12-30 | 2013-07-04 | Mako Surgical Corp. | Systems and methods for customizing interactive haptic boundaries |
| US9530221B2 (en) | 2012-01-06 | 2016-12-27 | Pelco, Inc. | Context aware moving object detection |
| EP2812089B1 (en) | 2012-02-06 | 2019-04-10 | Sony Interactive Entertainment Europe Limited | Book object for augmented reality |
| US9386297B2 (en) | 2012-02-24 | 2016-07-05 | Casio Computer Co., Ltd. | Image generating apparatus generating reconstructed image, method, and computer-readable recording medium |
| KR20130110907A (ko) | 2012-03-30 | 2013-10-10 | 삼성전자주식회사 | 가상 현실과 증강 현실을 이용한 원격 제어 장치 및 방법 |
| US9293118B2 (en) * | 2012-03-30 | 2016-03-22 | Sony Corporation | Client device |
| US9122321B2 (en) | 2012-05-04 | 2015-09-01 | Microsoft Technology Licensing, Llc | Collaboration environment using see through displays |
| WO2013167864A1 (en) * | 2012-05-11 | 2013-11-14 | Milan Momcilo Popovich | Apparatus for eye tracking |
| US9311750B2 (en) | 2012-06-05 | 2016-04-12 | Apple Inc. | Rotation operations in a mapping application |
| US9671566B2 (en) | 2012-06-11 | 2017-06-06 | Magic Leap, Inc. | Planar waveguide apparatus with diffraction element(s) and system employing same |
| WO2013188464A1 (en) | 2012-06-11 | 2013-12-19 | Magic Leap, Inc. | Multiple depth plane three-dimensional display using a wave guide reflector array projector |
| US9111135B2 (en) | 2012-06-25 | 2015-08-18 | Aquifi, Inc. | Systems and methods for tracking human hands using parts based template matching using corresponding pixels in bounded regions of a sequence of frames that are a specified distance interval from a reference camera |
| GB2506338A (en) | 2012-07-30 | 2014-04-02 | Sony Comp Entertainment Europe | A method of localisation and mapping |
| US8829409B2 (en) | 2012-10-10 | 2014-09-09 | Thermo Fisher Scientific Inc. | Ultra-high speed imaging array with orthogonal readout architecture |
| CN105188516B (zh) | 2013-03-11 | 2017-12-22 | 奇跃公司 | 用于增强和虚拟现实的系统与方法 |
| US9349072B2 (en) | 2013-03-11 | 2016-05-24 | Microsoft Technology Licensing, Llc | Local feature based image compression |
| US10025486B2 (en) | 2013-03-15 | 2018-07-17 | Elwha Llc | Cross-reality select, drag, and drop for augmented reality systems |
| WO2014169238A1 (en) | 2013-04-11 | 2014-10-16 | Digimarc Corporation | Methods for object recognition and related arrangements |
| US9154919B2 (en) | 2013-04-22 | 2015-10-06 | Alcatel Lucent | Localization systems and methods |
| EP2808842B1 (en) * | 2013-05-31 | 2017-08-16 | Technische Universität München | An apparatus and method for tracking and reconstructing three-dimensional objects |
| US10262462B2 (en) | 2014-04-18 | 2019-04-16 | Magic Leap, Inc. | Systems and methods for augmented and virtual reality |
| US9874749B2 (en) | 2013-11-27 | 2018-01-23 | Magic Leap, Inc. | Virtual and augmented reality systems and methods |
| US9406137B2 (en) | 2013-06-14 | 2016-08-02 | Qualcomm Incorporated | Robust tracking using point and line features |
| US9329682B2 (en) | 2013-06-18 | 2016-05-03 | Microsoft Technology Licensing, Llc | Multi-step virtual object selection |
| WO2014202258A1 (en) | 2013-06-21 | 2014-12-24 | National University Of Ireland, Maynooth | A method for mapping an environment |
| US9779548B2 (en) | 2013-06-25 | 2017-10-03 | Jordan Kent Weisman | Multiuser augmented reality system |
| US9646384B2 (en) | 2013-09-11 | 2017-05-09 | Google Technology Holdings LLC | 3D feature descriptors with camera pose information |
| CN107219628B (zh) | 2013-11-27 | 2020-05-01 | 奇跃公司 | 虚拟和增强现实系统与方法 |
| WO2015094360A1 (en) | 2013-12-20 | 2015-06-25 | Intel Corporation | Wi-fi scan scheduling and power adaptation for low-power indoor location |
| US10586395B2 (en) | 2013-12-30 | 2020-03-10 | Daqri, Llc | Remote object detection and local tracking using visual odometry |
| US10203762B2 (en) | 2014-03-11 | 2019-02-12 | Magic Leap, Inc. | Methods and systems for creating virtual and augmented reality |
| US9830679B2 (en) | 2014-03-25 | 2017-11-28 | Google Llc | Shared virtual reality |
| US10380410B2 (en) | 2014-04-07 | 2019-08-13 | Eyeways Systems Ltd. | Apparatus and method for image-based positioning, orientation and situational awareness |
| US9754167B1 (en) * | 2014-04-17 | 2017-09-05 | Leap Motion, Inc. | Safety for wearable virtual reality devices via object detection and tracking |
| WO2015161307A1 (en) * | 2014-04-18 | 2015-10-22 | Magic Leap, Inc. | Systems and methods for augmented and virtual reality |
| GB2526263B (en) | 2014-05-08 | 2019-02-06 | Sony Interactive Entertainment Europe Ltd | Image capture method and apparatus |
| US10068373B2 (en) | 2014-07-01 | 2018-09-04 | Samsung Electronics Co., Ltd. | Electronic device for providing map information |
| CN104143212A (zh) | 2014-07-02 | 2014-11-12 | 惠州Tcl移动通信有限公司 | 基于穿戴设备的增强现实方法及系统 |
| US10198865B2 (en) | 2014-07-10 | 2019-02-05 | Seiko Epson Corporation | HMD calibration with direct geometric modeling |
| US10509865B2 (en) | 2014-09-18 | 2019-12-17 | Google Llc | Dress form for three-dimensional drawing inside virtual reality environment |
| US20200252233A1 (en) | 2014-09-24 | 2020-08-06 | James Thomas O'Keeffe | System and method for user profile enabled smart building control |
| US10719727B2 (en) | 2014-10-01 | 2020-07-21 | Apple Inc. | Method and system for determining at least one property related to at least part of a real environment |
| CN107209247B (zh) | 2014-12-04 | 2021-06-18 | 赫尔环球有限公司 | 支持数据的协作收集 |
| US10335677B2 (en) | 2014-12-23 | 2019-07-02 | Matthew Daniel Fuchs | Augmented reality system with agent device for viewing persistent content and method of operation thereof |
| US9685005B2 (en) | 2015-01-02 | 2017-06-20 | Eon Reality, Inc. | Virtual lasers for interacting with augmented reality environments |
| US9852546B2 (en) | 2015-01-28 | 2017-12-26 | CCP hf. | Method and system for receiving gesture input via virtual control objects |
| US20160300389A1 (en) | 2015-04-08 | 2016-10-13 | Exactigo, Inc. | Correlated immersive virtual simulation for indoor navigation |
| US9467718B1 (en) | 2015-05-06 | 2016-10-11 | Echostar Broadcasting Corporation | Apparatus, systems and methods for a content commentary community |
| KR101725478B1 (ko) | 2015-05-21 | 2017-04-11 | 주식회사 맥스트 | 3d 점군 인식 기반의 증강 현실 출력 방법과 이를 수행하기 위한 장치 및 시스템 |
| US20160381118A1 (en) | 2015-06-23 | 2016-12-29 | Microsoft Technology Licensing, Llc | Extracting and formatting content from web-resources |
| US20170061696A1 (en) * | 2015-08-31 | 2017-03-02 | Samsung Electronics Co., Ltd. | Virtual reality display apparatus and display method thereof |
| CN108351217B (zh) | 2015-09-10 | 2022-03-01 | 欧里伊恩特新媒体有限公司 | 在全球定位系统拒绝访问的导航、追踪及定位的移动装置 |
| US10311511B2 (en) | 2015-09-14 | 2019-06-04 | The Toronto-Dominion Bank | Connected device-based property evaluation |
| AU2016327985B2 (en) | 2015-09-25 | 2021-07-29 | Magic Leap, Inc. | Methods and systems for detecting and combining structural features in 3D reconstruction |
| US20170094227A1 (en) | 2015-09-25 | 2017-03-30 | Northrop Grumman Systems Corporation | Three-dimensional spatial-awareness vision system |
| GB201517101D0 (en) | 2015-09-28 | 2015-11-11 | Univ Essex Entpr Ltd | Mixed-reality system |
| US10471355B2 (en) * | 2015-10-21 | 2019-11-12 | Sharp Kabushiki Kaisha | Display system, method of controlling display system, image generation control program, and computer-readable storage medium |
| US9706366B2 (en) | 2015-11-06 | 2017-07-11 | International Business Machines Corporation | WiFi-fingerprint based indoor localization map |
| US10254845B2 (en) | 2016-01-05 | 2019-04-09 | Intel Corporation | Hand gesture recognition for cursor control |
| US10523865B2 (en) | 2016-01-06 | 2019-12-31 | Texas Instruments Incorporated | Three dimensional rendering for surround view using predetermined viewpoint lookup tables |
| CN108700939B (zh) * | 2016-02-05 | 2022-07-05 | 奇跃公司 | 用于增强现实的系统和方法 |
| WO2017143303A1 (en) | 2016-02-17 | 2017-08-24 | Meta Company | Apparatuses, methods and systems for sharing virtual elements |
| US10373380B2 (en) | 2016-02-18 | 2019-08-06 | Intel Corporation | 3-dimensional scene analysis for augmented reality operations |
| JP6776609B2 (ja) | 2016-02-22 | 2020-10-28 | デクセリアルズ株式会社 | 異方性導電フィルム |
| US20180122143A1 (en) | 2016-03-15 | 2018-05-03 | Sutherland Cook Ellwood, JR. | Hybrid photonic vr/ar systems |
| US10115234B2 (en) | 2016-03-21 | 2018-10-30 | Accenture Global Solutions Limited | Multiplatform based experience generation |
| US10802147B2 (en) | 2016-05-18 | 2020-10-13 | Google Llc | System and method for concurrent odometry and mapping |
| US10586391B2 (en) | 2016-05-31 | 2020-03-10 | Accenture Global Solutions Limited | Interactive virtual reality platforms |
| CN109804334B (zh) | 2016-08-11 | 2022-07-15 | 奇跃公司 | 用于三维空间中虚拟对象的自动放置的系统和方法 |
| WO2018039270A1 (en) | 2016-08-22 | 2018-03-01 | Magic Leap, Inc. | Virtual, augmented, and mixed reality systems and methods |
| US10162362B2 (en) | 2016-08-29 | 2018-12-25 | PerceptIn, Inc. | Fault tolerance to provide robust tracking for autonomous positional awareness |
| US10007868B2 (en) | 2016-09-19 | 2018-06-26 | Adobe Systems Incorporated | Font replacement based on visual similarity |
| US10354129B2 (en) | 2017-01-03 | 2019-07-16 | Intel Corporation | Hand gesture recognition for virtual reality and augmented reality devices |
| US10812936B2 (en) | 2017-01-23 | 2020-10-20 | Magic Leap, Inc. | Localization determination for mixed reality systems |
| US11275163B2 (en) | 2017-01-25 | 2022-03-15 | Korea Institute Of Science And Technology | Slam method and apparatus robust to wireless environment change |
| US10460489B2 (en) | 2017-03-15 | 2019-10-29 | Facebook, Inc. | Visual editor for designing augmented-reality effects and configuring scaling parameters |
| KR102384232B1 (ko) | 2017-03-17 | 2022-04-06 | 매직 립, 인코포레이티드 | 증강 현실 데이터를 레코딩하기 위한 기술 |
| IL269545B2 (en) | 2017-03-30 | 2023-10-01 | Magic Leap Inc | centralized processing |
| US10600252B2 (en) | 2017-03-30 | 2020-03-24 | Microsoft Technology Licensing, Llc | Coarse relocalization using signal fingerprints |
| US9754397B1 (en) | 2017-04-07 | 2017-09-05 | Mirage Worlds, Inc. | Systems and methods for contextual augmented reality sharing and performance |
| KR102555443B1 (ko) | 2017-05-01 | 2023-07-12 | 매직 립, 인코포레이티드 | 콘텐츠를 공간 3d 환경에 매칭 |
| US11417091B2 (en) | 2017-05-30 | 2022-08-16 | Ptc Inc. | Use of coordinated local user devices during a shared augmented reality session |
| CN109145927A (zh) | 2017-06-16 | 2019-01-04 | 杭州海康威视数字技术股份有限公司 | 一种对形变图像的目标识别方法及装置 |
| JP6585665B2 (ja) * | 2017-06-29 | 2019-10-02 | ファナック株式会社 | 仮想オブジェクト表示システム |
| US10503955B2 (en) | 2017-08-29 | 2019-12-10 | Synaptics Incorporated | Device with improved circuit positioning |
| WO2019046774A1 (en) | 2017-09-01 | 2019-03-07 | Memorial Sloan Kettering Cancer Center | SYSTEMS AND METHODS FOR GENERATING 3D MEDICAL IMAGES BY SCANNING A WHOLE TISSUE BLOCK |
| US10546387B2 (en) | 2017-09-08 | 2020-01-28 | Qualcomm Incorporated | Pose determination with semantic segmentation |
| US10685456B2 (en) | 2017-10-12 | 2020-06-16 | Microsoft Technology Licensing, Llc | Peer to peer remote localization for devices |
| US10422648B2 (en) | 2017-10-17 | 2019-09-24 | AI Incorporated | Methods for finding the perimeter of a place using observed coordinates |
| IL304881B1 (en) | 2017-11-14 | 2024-03-01 | Magic Leap Inc | Discovering and describing a fully complex point of interest using homographic processing |
| WO2019118886A1 (en) | 2017-12-15 | 2019-06-20 | Magic Leap, Inc. | Enhanced pose determination for display device |
| AU2018388581A1 (en) | 2017-12-22 | 2020-07-23 | Magic Leap, Inc. | Methods and system for managing and displaying virtual content in a mixed reality system |
| US11237004B2 (en) | 2018-03-27 | 2022-02-01 | Uatc, Llc | Log trajectory estimation for globally consistent maps |
| US10838574B2 (en) | 2018-04-09 | 2020-11-17 | Spatial Systems Inc. | Augmented reality computing environments—workspace save and load |
| US10803671B2 (en) | 2018-05-04 | 2020-10-13 | Microsoft Technology Licensing, Llc | Authoring content in three-dimensional environment |
| US11202006B2 (en) | 2018-05-18 | 2021-12-14 | Samsung Electronics Co., Ltd. | CMOS-assisted inside-out dynamic vision sensor tracking for low power mobile platforms |
| CN110515452B (zh) | 2018-05-22 | 2022-02-22 | 腾讯科技(深圳)有限公司 | 图像处理方法、装置、存储介质和计算机设备 |
| US10706629B2 (en) | 2018-06-15 | 2020-07-07 | Dell Products, L.P. | Coordinate override in virtual, augmented, and mixed reality (xR) applications |
| JP7309849B2 (ja) | 2018-07-24 | 2023-07-18 | マジック リープ, インコーポレイテッド | 画像ディスプレイデバイスの位置特定マップを決定および/または評価するための方法および装置 |
| US11227435B2 (en) | 2018-08-13 | 2022-01-18 | Magic Leap, Inc. | Cross reality system |
| CN112805750A (zh) | 2018-08-13 | 2021-05-14 | 奇跃公司 | 跨现实系统 |
| JP7361763B2 (ja) | 2018-09-04 | 2023-10-16 | アクティーア・ソシエテ・アノニム | 1人又は複数人のユーザの血圧を決定するシステム |
| CN113196209A (zh) | 2018-10-05 | 2021-07-30 | 奇跃公司 | 在任何位置渲染位置特定的虚拟内容 |
| US10854007B2 (en) | 2018-12-03 | 2020-12-01 | Microsoft Technology Licensing, Llc | Space models for mixed reality |
| US20200211290A1 (en) | 2018-12-26 | 2020-07-02 | Lg Electronics Inc. | Xr device for providing ar mode and vr mode and method for controlling the same |
| EP3895416A4 (en) | 2019-03-27 | 2022-03-02 | Guangdong Oppo Mobile Telecommunications Corp., Ltd. | THREE-DIMENSIONAL LOCATION USING LIGHT DEPTH IMAGERY |
| US11151792B2 (en) | 2019-04-26 | 2021-10-19 | Google Llc | System and method for creating persistent mappings in augmented reality |
| US10748302B1 (en) | 2019-05-02 | 2020-08-18 | Apple Inc. | Multiple user simultaneous localization and mapping (SLAM) |
| US11010921B2 (en) | 2019-05-16 | 2021-05-18 | Qualcomm Incorporated | Distributed pose estimation |
| US20200364937A1 (en) | 2019-05-16 | 2020-11-19 | Subvrsive, Inc. | System-adaptive augmented reality |
| US11145083B2 (en) | 2019-05-21 | 2021-10-12 | Microsoft Technology Licensing, Llc | Image-based localization |
| US10854012B1 (en) | 2019-05-29 | 2020-12-01 | Dell Products, L.P. | Concealing loss of distributed simultaneous localization and mapping (SLAM) data in edge cloud architectures |
| US20200380263A1 (en) | 2019-05-29 | 2020-12-03 | Gyrfalcon Technology Inc. | Detecting key frames in video compression in an artificial intelligence semiconductor solution |
| US10852828B1 (en) | 2019-07-17 | 2020-12-01 | Dell Products, L.P. | Automatic peripheral pairing with hand assignments in virtual, augmented, and mixed reality (xR) applications |
| US10936874B1 (en) | 2019-08-13 | 2021-03-02 | Dell Products, L.P. | Controller gestures in virtual, augmented, and mixed reality (xR) applications |
| KR20190104928A (ko) | 2019-08-22 | 2019-09-11 | 엘지전자 주식회사 | Xr 디바이스 및 xr 디바이스 제어 방법 |
| US11270515B2 (en) | 2019-09-04 | 2022-03-08 | Qualcomm Incorporated | Virtual keyboard |
| WO2021050595A1 (en) | 2019-09-09 | 2021-03-18 | Apple Inc. | Multimodal inputs for computer-generated reality |
| JP2022551733A (ja) | 2019-10-15 | 2022-12-13 | マジック リープ, インコーポレイテッド | 位置特定サービスを伴うクロスリアリティシステム |
| JP2022551734A (ja) | 2019-10-15 | 2022-12-13 | マジック リープ, インコーポレイテッド | 複数のデバイスタイプをサポートするクロスリアリティシステム |
| JP2022551735A (ja) | 2019-10-15 | 2022-12-13 | マジック リープ, インコーポレイテッド | 無線フィンガプリントを用いたクロスリアリティシステム |
| EP4052086A4 (en) | 2019-10-31 | 2023-11-15 | Magic Leap, Inc. | EXTENDED REALITY SYSTEM PROVIDING QUALITY INFORMATION ABOUT PERSISTENT COORDINATE FRAMES |
| CN114730546A (zh) | 2019-11-12 | 2022-07-08 | 奇跃公司 | 具有定位服务和基于位置的共享内容的交叉现实系统 |
| US11562542B2 (en) | 2019-12-09 | 2023-01-24 | Magic Leap, Inc. | Cross reality system with simplified programming of virtual content |
| WO2021163306A1 (en) | 2020-02-13 | 2021-08-19 | Magic Leap, Inc. | Cross reality system with accurate shared maps |
| JP2023514208A (ja) | 2020-02-13 | 2023-04-05 | マジック リープ, インコーポレイテッド | マルチ分解能フレーム記述子を使用したマップ処理を伴うクロスリアリティシステム |
| WO2021163289A1 (en) | 2020-02-13 | 2021-08-19 | Magic Leap, Inc. | Cross reality system for large scale environments |
| US11830149B2 (en) | 2020-02-13 | 2023-11-28 | Magic Leap, Inc. | Cross reality system with prioritization of geolocation information for localization |
| CN115461787A (zh) | 2020-02-26 | 2022-12-09 | 奇跃公司 | 具有快速定位的交叉现实系统 |
| US11900547B2 (en) | 2020-04-29 | 2024-02-13 | Magic Leap, Inc. | Cross reality system for large scale environments |
-
2019
- 2019-08-12 CN CN201980066842.8A patent/CN112805750A/zh active Pending
- 2019-08-12 US US16/538,759 patent/US10957112B2/en active Active
- 2019-08-12 JP JP2021507660A patent/JP7445642B2/ja active Active
- 2019-08-12 EP EP19849090.6A patent/EP3837674A4/en active Pending
- 2019-08-12 WO PCT/US2019/046240 patent/WO2020036898A1/en unknown
-
2021
- 2021-03-22 US US17/208,844 patent/US11386629B2/en active Active
-
2023
- 2023-11-14 JP JP2023193577A patent/JP2024009071A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110254950A1 (en) | 2008-10-09 | 2011-10-20 | Isis Innovation Limited | Visual tracking of objects in images, and segmentation of images |
| JP2013141049A (ja) | 2010-03-24 | 2013-07-18 | Hitachi Ltd | 世界座標系データベースを利用したサーバ及び端末 |
| US20140267234A1 (en) | 2013-03-15 | 2014-09-18 | Anselm Hook | Generation and Sharing Coordinate System Between Users on Mobile |
| US20150049201A1 (en) | 2013-08-19 | 2015-02-19 | Qualcomm Incorporated | Automatic calibration of scene camera for optical see-through head mounted display |
| JP2015079490A (ja) | 2013-10-04 | 2015-04-23 | キヤノン株式会社 | フレームを選択する方法、装置、及びシステム |
| JP2017529635A (ja) | 2014-06-14 | 2017-10-05 | マジック リープ, インコーポレイテッドMagic Leap,Inc. | 仮想および拡張現実を作成する方法およびシステム |
| US20160148433A1 (en) | 2014-11-16 | 2016-05-26 | Eonite, Inc. | Systems and methods for augmented reality preparation, processing, and application |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3837674A4 (en) | 2022-05-18 |
| US20210209859A1 (en) | 2021-07-08 |
| JP2021534491A (ja) | 2021-12-09 |
| WO2020036898A1 (en) | 2020-02-20 |
| US10957112B2 (en) | 2021-03-23 |
| JP2024009071A (ja) | 2024-01-19 |
| EP3837674A1 (en) | 2021-06-23 |
| CN112805750A (zh) | 2021-05-14 |
| US11386629B2 (en) | 2022-07-12 |
| US20200090407A1 (en) | 2020-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7445642B2 (ja) | クロスリアリティシステム | |
| US11227435B2 (en) | Cross reality system | |
| US11568605B2 (en) | Cross reality system with localization service | |
| US11257294B2 (en) | Cross reality system supporting multiple device types | |
| US20230119217A1 (en) | Cross reality system with fast localization | |
| JP2023504570A (ja) | 仮想コンテンツの簡略化されたプログラミングを伴うクロスリアリティシステム | |
| JP2023514206A (ja) | 大規模環境のためのクロスリアリティシステム | |
| JP2023514205A (ja) | 正確な共有マップを伴うクロスリアリティシステム | |
| JP2023504775A (ja) | 位置特定サービスおよび共有場所ベースのコンテンツを伴うクロスリアリティシステム | |
| JP2023514207A (ja) | 位置特定に関するジオロケーション情報の優先順位化を伴うクロスリアリティシステム | |
| JP2023501952A (ja) | 持続座標フレームについての品質情報を伴うクロスリアリティシステム | |
| JP2022551735A (ja) | 無線フィンガプリントを用いたクロスリアリティシステム | |
| JP2023524446A (ja) | 大規模環境のためのクロスリアリティシステム | |
| JP2023514208A (ja) | マルチ分解能フレーム記述子を使用したマップ処理を伴うクロスリアリティシステム | |
| JP2023515796A (ja) | Wifi/gpsベースのマップマージを伴うクロスリアリティシステム | |
| JP2023515577A (ja) | 大規模環境再構築のためのクロスリアリティシステム | |
| JP2022509731A (ja) | クロスリアリティシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220803 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220803 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230713 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230814 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7445642 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |