(実施形態1)
(1)概要
本実施形態に係る測定システム1の概要について、図1及び図2を参照して説明する。
測定システム1は、対象空間A1内での伝送媒体の受信状況を測定するためのシステムである。本実施形態では一例として、測定システム1が、位置検知システム3のキャリブレーションに使用される場合について説明する。
位置検知システム3は、例えば、伝送媒体Rw1としての電波を用いて、対象空間A1での対象物(例えば「人」)の位置を検知するシステムである。この種の位置検知システム3は、例えば、対象空間A1の定位置に設置された送信機31から送信される伝送媒体Rw1を、対象物に付した受信機32で受信するときの、伝送媒体Rw1の受信状況(受信強度等)に基づいて、対象物の位置を推定可能である。要するに、送信機31の位置が固定であれば、送信機31と受信機32との間を伝送される伝送媒体Rw1の受信状況、つまり受信機32での伝送媒体Rw1の受信強度は、送信機31と受信機32との相対的な位置関係によって変動する。
したがって、位置検知システム3では、送信機31と受信機32との間を伝送される伝送媒体Rw1の受信状況(つまり受信機32での伝送媒体Rw1の受信強度)から、対象空間A1内での対象物の位置を推定できる。そのため、対象空間A1の各位置において、送信機31と受信機32との間を伝送される伝送媒体Rw1の受信状況を、正確に把握することは、対象物の位置の検知精度の向上につながる。よって、対象空間A1の各位置における実際の伝送媒体Rw1の受信状況を測定し、この測定結果に基づいて位置検知システム3の各種パラメータを設定又は調整するキャリブレーションを行うことで、位置検知システム3の検知精度の向上を図ることができる。
このような位置検知システム3のキャリブレーションに際して、対象空間A1の各位置における実際の伝送媒体Rw1の受信状況の測定を、作業者(人)が行うとすれば、作業者の多大な工数が必要になる。つまり、このような測定作業においては、作業者は、例えば、伝送媒体Rw1の受信状況の測定器を持って、対象空間A1内に設定される複数の測定点P0(図3A参照)の各々で、伝送媒体Rw1の受信状況を実際に測定する。この場合、作業者は、対象空間A1内において、各測定点P0での受信状況を順次測定しつつ、複数の測定点P0を巡回する。そのため、作業者は、少なくとも複数の測定点P0での受信状況の測定にかかる累計時間と、複数の測定点P0間の移動にかかる時間と、の合計時間を要することになる。さらに、作業者が、受信状況を測定する位置が測定点P0からずれていると、各測定点P0での受信状況を正確に測定することはできないので、作業者は、対象空間A1内の測定点P0を正確に見極めて、受信状況を測定する必要がある。そのため、作業者が各測定点P0での受信状況の測定には時間がかかり、かつ測定点P0の見極めを誤った場合等には測定結果の信頼性が低くなる。
本実施形態に係る測定システム1は、例えば、上記のような場面において、作業者に代えて又は作業者と共に、対象空間A1内の複数の測定点P0での伝送媒体Rw1の受信状況を測定するシステムである。すなわち、測定システム1は、図2に示すように、本体2と、伝送部11と、測定部12と、を備える。本体2は、複数の測定点P0が設定される対象空間A1内を自律移動可能である。伝送部11は、本体2に搭載され、対象機器4との間で伝送媒体Rw1の送信と受信との少なくとも一方を行う。測定部12は、複数の測定点P0を本体2が巡回する巡回期間において、各測定点P0に本体2が位置するときの対象機器4と伝送部11との間を伝送される伝送媒体Rw1の受信状況を、各測定点P0に対応付けて測定する。
このような構成によれば、各測定点P0での伝送媒体Rw1の受信状況の測定作業を、対象空間A1内を自律移動可能な本体2にて実行することができる。つまり、本体2には、対象機器4との間で伝送媒体Rw1の送信と受信との少なくとも一方を行う伝送部11が実装されており、測定部12は、対象機器4と伝送部11との間を伝送される伝送媒体Rw1の受信状況を測定する。そして、測定部12は、複数の測定点P0を本体2が巡回する巡回期間において、伝送媒体Rw1の受信状況を、各測定点P0に対応付けて測定する。このように、測定システム1では、作業者に代えて又は作業者と共に、対象空間A1内の複数の測定点P0での伝送媒体Rw1の受信状況を測定できるので、作業者の作業負担を減らすことができる。しかも、伝送部11を搭載した本体2は、対象空間A1内を自律移動するので、受信状況を測定する位置が測定点P0からずれにくく、測定結果の信頼性も低下しにくい。結果的に、対象空間A1内の各位置における伝送媒体Rw1の受信状況の把握が容易になる、という利点がある。
(2)詳細
以下、本実施形態に係る測定システム1について、詳しく説明する。
(2.1)定義
本開示でいう「対象機器」は、測定システム1の伝送部11との間で、伝送媒体Rw1の送信と受信との少なくとも一方を行う機器である。ここで、対象機器4は、伝送媒体Rw1を送信する送信機31であってもよいし、伝送媒体Rw1を受信する受信機32であってもよい。つまり、対象機器4は、例えば、位置検知システム3の送信機31又は受信機32からなる。本実施形態では一例として、位置検知システム3の送信機31が対象機器4であることと仮定する。この場合、測定システム1の伝送部11は、対象機器4である送信機31から送信される伝送媒体Rw1を受信する機能(受信機能)を少なくとも有している。
また、本開示でいう「伝送媒体」は、対象機器4と伝送部11との間を伝送される媒体を意味し、電磁波、音波及び超音波等を含む。ここでいう「電磁波」は、電波、並びに、赤外線、可視光及びX線等の光を含む。このような電磁波等からなる伝送媒体Rw1は、対象空間A1中を伝播され、対象機器4と伝送部11との間で送受信される。本実施形態では一例として、伝送媒体Rw1は電波であることと仮定する。
また、本開示でいう、対象機器4と伝送部11との間を伝送される伝送媒体Rw1の「受信状況」は、例えば、伝送媒体Rw1の受信強度、SN比(Signal-Noise Ratio)、減衰率、エラー率、到来方向又は伝送速度等である。つまり、伝送媒体Rw1の「受信状況」は、対象機器4と伝送部11とのうち伝送媒体Rw1を送信する側の機器(装置)から出力され、受信する側の機器(装置)で受信された、伝送媒体Rw1の状況を表す指標である。伝送媒体Rw1の「受信状況」が、伝送媒体Rw1の受信強度であれば、対象機器4と伝送部11とのうち伝送媒体Rw1(電波)を受信する側の機器(装置)での伝送媒体Rw1の受信強度が、「受信状況」に相当する。すなわち、対象機器4が伝送媒体Rw1を送信する送信機31である場合、伝送部11での伝送媒体Rw1の受信強度が、対象機器4と伝送部11との間を伝送される伝送媒体Rw1の「受信状況」となる。一方、対象機器4が伝送媒体Rw1を受信する受信機32である場合、受信機32での伝送媒体Rw1の受信強度が、対象機器4と伝送部11との間を伝送される伝送媒体Rw1の「受信状況」となる。このような「受信状況」は、伝送媒体Rw1の伝送距離、つまり対象機器4と伝送部11との間の距離に応じて、伝送媒体Rw1の減衰等に起因して変化する。上述したように、本実施形態では一例として、送信機31が対象機器4であって、かつ伝送媒体Rw1は電波であるので、伝送部11での伝送媒体Rw1の受信信号強度(RSSI:Received Signal Strength Indicator)が、上記「受信状況」であることとする。
また、本開示でいう「位置検知システム」は、上述したように、伝送媒体Rw1を用いて、対象空間A1での対象物の位置を検知するシステムであって、例えば、対象物である人H1(図4参照)の位置を検知するために用いられる。このような位置検知システム3は、例えば、対象空間A1を含む施設(建物を含む)で利用される。本開示でいう「施設」は、オフィス、工場、ビル、店舗、学校、福祉施設又は病院等の非住宅施設、及び戸建住宅、集合住宅、又は集合住宅の各住戸等の住宅施設を含む。非住宅施設には、劇場、映画館、公会堂、遊技場、複合施設、飲食店、百貨店、ホテル、旅館、幼稚園、図書館、博物館、美術館、地下街、駅及び空港等も含む。さらには、本開示でいう「施設」には、建物(建造物)だけでなく、球場、庭、駐車場、グランド及び公園等の屋外施設を含む。本実施形態では一例として、位置検知システム3は、オフィス等の屋内施設内の対象空間A1において対象物である人H1の位置を検知するために用いられる、ローカル測位システム(LPS:Local Positioning System)であると仮定する。
また、本開示でいう「搭載」は、内蔵(分離できないように一体化されている態様を含む)及び外付け(カプラー等を用いて取外し可能に固定されている態様を含む)の両方の態様を含む。すなわち、本体2に搭載される伝送部11は、本体2に内蔵されていてもよいし、本体2に外付けされていてもよい。
(2.2)測定システムの構成
まず、本実施形態に係る測定システム1の構成について、図1~図3Bを参照して説明する。
測定システム1は、上述したように、本体2と、伝送部11と、測定部12と、を備えている。また、本実施形態では、測定システム1は、本体2、伝送部11及び測定部12に加えて、図2に示すように、検知部13、推定部14、収集部15、取得部16、設定部17、変更部18、出力部19、記憶部20及び処理部5を更に備えている。
本実施形態では一例として、測定システム1の構成要素が全て本体2に集約されている。つまり、測定システム1における、伝送部11、測定部12、検知部13、推定部14、収集部15、取得部16、設定部17、変更部18、出力部19、記憶部20及び処理部5は、全て本体2に搭載されている。
また、本実施形態では、測定システム1での測定結果は位置検知システム3のキャリブレーションに用いられるので、測定システム1と位置検知システム3とは、通信可能に構成されている。本開示でいう「通信可能」とは、有線通信又は無線通信の適宜の通信方式により、直接的、又はネットワーク若しくは中継器等を介して間接的に、信号を授受できることを意味する。すなわち、測定システム1は、位置検知システム3との間で、互いに信号を授受することができる。
本体2は、図1に示すように、対象空間A1内を自律移動可能に構成されている。本実施形態では、本体2は、対象空間A1の床面等からなる平坦な走行面A11(図1参照)上を自律走行する。本体2は、複数の車輪24(図1参照)を有し、複数の車輪24を個別に駆動することにより、移動面上を自律的に移動(走行)する。また、本実施形態では一例として、本体2は、略円柱状に形成されており、その下面に複数の車輪24を有している。
本体2は、図2に示すように、駆動部21と、制御部22と、バッテリ23と、を有している。
駆動部21は、電動機(モータ)及び減速機等を含み、バッテリ23に蓄積された電気エネルギを用いて複数の車輪24を駆動する。制御部22は、後述する推定部14で推定される自己位置等に基づいて、駆動部21を制御し、本体2の自律走行を実現する。つまり、制御部22は、本体2の現在の位置である自己位置等に基づいて、少なくとも目的地(測定点P0)までの本体2の移動経路を決定し(経路計画)、この移動経路に沿って本体2が移動するように駆動部21を動作させる。これにより、本体2の自律走行が実現される。バッテリ23は、本体2(駆動部21及び制御部22)の動作用の電力だけでなく、伝送部11及び測定部12等、測定システム1の各構成要素の動作用の電力を供給する。バッテリ23は、充電及び放電が可能な、リチウムイオン電池(LIB:Lithium Ion Battery)等の二次電池である。
伝送部11は、本体2に搭載されている。伝送部11は、対象機器4との間で伝送媒体Rw1の送信と受信との少なくとも一方を行う。本実施形態では、上述したように、対象機器4は送信機31からなるので、伝送部11は、対象機器4(送信機31)から送信される伝送媒体Rw1を受信する機能(受信機能)を少なくとも有している。
伝送部11は、アンテナ111を有している。伝送部11は、対象機器4である送信機31から送信される伝送媒体Rw1としての電波を、アンテナ111にて受信する。本実施形態では一例として、アンテナ111は、少なくとも平面視における本体2の全周方向からの伝送媒体Rw1を受信できるように、本体2に搭載された検知部13の上面から上方に突出して設けられている。
測定部12は、複数の測定点P0を本体2が巡回する巡回期間において、各測定点P0に本体2が位置するときの対象機器4と伝送部11との間を伝送される伝送媒体Rw1の受信状況を、各測定点P0に対応付けて測定する。すなわち、測定部12は、基本的に、対象機器4と伝送部11との間を伝送される伝送媒体Rw1の受信状況(本実施形態では受信強度)を測定する機能を有している。本実施形態では、上述したように、対象機器4は送信機31からなるので、伝送部11での伝送媒体Rw1の受信強度(RSSI)を、測定部12は、「受信状況」として測定することになる。その上で、測定部12は、複数の測定点P0を本体2が巡回する巡回期間において、各測定点P0に本体2が位置するときの、上記「受信状況」を測定点P0ごとに対応付けて測定する。
検知部13は、本体2に搭載されている。検知部13は、本体2の周囲の状況を検知する。本開示でいう「本体2の周囲の状況」は、本体2の周囲における壁、床、柱若しくは天井等の構造体の有無及び配置、又は本体2の周囲にある机等の什器Ob1(図1参照)若しくはコピー機等の設備Ob2(図7参照)の有無及び配置の状況を含む。本開示でいう「什器」は、机に限らず、例えば、棚、椅子及びパーテーション等を含む。本開示でいう「設備」は、コピー機に限らず、例えば、空調設備、給湯設備及び防犯設備を含む。
検知部13は、例えば、イメージセンサ(カメラ)、ソナーセンサ、レーダ及びLiDAR(Light Detection and Ranging)等のセンサを含み、これらのセンサにて本体2の周囲の状況(構造体又は物体の有無等)を検知する。本実施形態では一例として、検知部13は、少なくとも平面視における本体2の全周方向について、状況を検知できるように、本体2の上面から突出したポールの上端部に配置されている。
推定部14は、対象空間A1内における本体2の現在の位置である自己位置を推定する。本実施形態では、対象空間A1には複数の測定点P0が設定されているため、推定部14は、少なくとも測定点P0単位で自己位置として推定する。言い換えれば、推定部14は、複数の測定点P0のうちの本体2が位置するいずれかの測定点P0を、自己位置として特定する。本実施形態では一例として、推定部14は、検知部13の検知結果に基づいて、自己位置を推定する。
本開示でいう「推定」は、おしはかって定める(決める)ことを意味し、特に、人があれこれ考えて決めることに限らず、ある事実に基づいて何らかの決定を行うこと全般を含む。そのため、例えば、コンピュータシステムに対して入力情報が入力された場合に、コンピュータシステムが、入力情報に基づいて演算を行って何らかの情報を出力情報として出力していれば、コンピュータシステムで出力情報が「推定」されたことになる。すなわち、推定部14であれば、検知部13の検知結果が入力され、この検知結果に基づいて本体2の現在位置(自己位置)を特定することにより、自己位置を推定することになる。
また、本実施形態では、推定部14は、SLAM(Simultaneous Localization and Mapping)のように、自己位置推定と環境地図作成とを同時に実行する機能を有している。推定部14の動作について詳しくは「(3.2)測定点の変更」の欄で説明する。
収集部15は、複数の測定点P0についての受信状況の測定結果を収集する。つまり、上述したように、測定部12は、複数の測定点P0を本体2が巡回する巡回期間において、各測定点P0に本体2が位置するときの「受信状況」を測定点P0ごとに対応付けて測定する。このようにして、巡回期間に測定部12にて複数回に分けて測定された、複数の測定点P0についての測定結果は、収集部15にて1まとまりのデータとして集計される。本実施形態では一例として、収集部15は、複数の測定点P0についての測定結果を、後述するテーブル形式(表1参照)で集計する。
取得部16は、対象空間A1に関する空間情報を取得する。本開示でいう「空間情報」は、例えば、対象空間A1の間取り、地図、地形、形状又は大きさ(広さ)等を表す情報である。本実施形態では、対象空間A1は、施設(ここではオフィス)の内部空間(室内空間)であるため、取得部16は、この施設の間取りに関する情報を、空間情報として取得する。本実施形態では一例として、空間情報は、BIM(Building Information Modeling)等の三次元のデータを含んでいる。ここで、空間情報は、例えば、対象空間A1に露出する、壁、床、柱又は天井等の構造体の部位ごとの情報、並びに属性及び材質等に関する情報を含んでいる。本実施形態では一例として、取得部16は、このような空間情報を、外部システムから通信又は非一時的記録媒体等を介して取得する。
設定部17は、空間情報に基づいて、対象空間A1に複数の測定点P0を設定する。すなわち、取得部16が取得した対象空間A1に関する空間情報は設定部17に入力される。そして、設定部17は、図3Aに示すように、空間情報が示す対象空間A1の間取り等の情報に基づいて、対象空間A1内に複数の測定点P0を自動的に設定する。本実施形態では、設定部17は、少なくとも測定点P0の数及び位置を決定することで、複数の測定点P0を設定する。ここで、測定点P0は、仮想的な点であって、対象空間A1(実空間)に実在するわけではなく、実体を伴わない。ただし、図3A等の図面においては、説明のために測定点P0を図示している。
変更部18は、対象空間A1に設定されている複数の測定点P0の少なくとも1つについて設定変更を行う。すなわち、本実施形態では、設定部17が決定した複数の測定点P0の数及び位置は固定的(不変)ではなく、変更部18により変更可能である。特に、本実施形態では、測定システム1が検知部13を備えているため、変更部18は、検知部13の検知結果に基づいて、設定変更を行う。
出力部19は、測定部12の測定結果に関連する測定データD1を出力する。本実施形態では一例として、測定データD1は、測定部12の測定結果そのものではなく、後述する処理部5にて所定の処理が施された後の測定部12の測定結果である。本実施形態では一例として、出力部19は、測定データD1を位置検知システム3のキャリブレーションに利用するべく、位置検知システム3に対して測定データD1を通信により出力(送信)する。
記憶部20は、測定部12の測定結果、設定部17での設定情報(複数の測定点P0に関する情報)、及び処理部5の処理結果等を記憶する。また、記憶部20は、推定部14又は処理部5等での演算に必要な情報等を更に記憶する。記憶部20は、EEPROM(Electrically Erasable Programmable Read-Only Memory)のような書き換え可能な不揮発性メモリを含む。
処理部5は、測定部12の測定結果に基づいて、所定の処理を実行する。本実施形態では、処理部5は、所定の処理として、少なくとも強度分布マップM1(図3B参照)の作成を実行する。強度分布マップM1は、図3Bに示すように、対象空間A1内における伝送媒体Rw1の受信状況(本実施形態では受信強度)の分布を表すデータである。図3Bの例では、強度分布マップM1は、対象機器4である複数の送信機311,312,313のうち、1つの送信機312から送信される伝送媒体Rw1(本実施形態では電波)についての、対象空間A1内での受信強度(RSSI)の分布を表している。図3Bでは一例として、強度分布マップM1は、網掛け(ドットハッチング)の「濃さ」にて受信強度を表しており、網掛けが濃い領域ほど受信強度が高い(大きい)ことを意味する。
また、本実施形態では、処理部5は、所定の処理として、強度分布マップM1の作成に代えて、又は加えて、対象空間A1内の什器Ob1等のレイアウト変更の提案を実行可能に構成されている。つまり、所定の処理は、対象空間A1内の物体(什器Ob1又は設備Ob2等)のレイアウトの提案を含む。
このような処理部5での処理が、測定部12の測定結果に施されることで、例えば、強度分布マップM1、及び物体のレイアウトの提案情報を含む測定データD1が生成される。そして、出力部19は、測定データD1を出力することで、測定部12の測定結果に関連する測定データD1を出力することになる。
本実施形態では、測定システム1は、1以上のメモリ及び1以上のプロセッサを含むコンピュータシステムを主構成とする。言い換えれば、コンピュータシステムのメモリに記録されたプログラムを、プロセッサが実行することにより、測定システム1の機能が実現される。特に、測定システム1のうちでも、測定部12、推定部14、収集部15、取得部16、設定部17、変更部18、出力部19、処理部5及び制御部22の機能については、コンピュータシステムが主構成となる。プログラムはメモリに予め記録されていてもよいし、インターネット等の電気通信回線を通して提供されてもよく、メモリカード等の非一時的記録媒体に記録されて提供されてもよい。
また、測定システム1は、上記構成に加えて、通信部及びユーザインタフェース等を更に備えていてもよい。ただし、通信部及びユーザインタフェース等は、測定システム1に必須の構成ではない。図2では、測定システム1の構成として、本体2、伝送部11、測定部12、検知部13、推定部14、収集部15、取得部16、設定部17、変更部18、出力部19、記憶部20及び処理部5以外の構成の図示を適宜省略している。
通信部は、直接的、又はネットワーク若しくは中継器等を介して間接的に、外部システム(位置検知システム3を含む)と通信するように構成されている。これにより、測定システム1は、外部システム(位置検知システム3を含む)との間で、測定データD1等のデータを授受することが可能である。
ユーザインタフェースは、例えば、タッチパネルディスプレイを含み、人(作業者等)の操作の受け付けと、人への情報の提示(表示)を行う。ユーザインタフェースは、タッチパネルディスプレイに限らず、例えば、キーボード、ポインティングデバイス、メカニカルなスイッチ、又はジェスチャセンサ等の入力装置を有していてもよい。また、ユーザインタフェースは、タッチパネルディスプレイに代えて、又はタッチパネルディスプレイと共に、音声入出力部を有していてもよい。
(2.3)位置検知システムの構成
次に、本実施形態に係る測定システム1の測定結果を用いてキャリブレーションが行われる位置検知システム3の構成について、図2及び図4を参照して説明する。図4は、位置検知システム3の運用中の対象空間A1の様子を示す概略図である。つまり、図4に示す場面では、既に、測定システム1による伝送媒体Rw1の受信状況の測定が終了し、かつ測定結果を用いた位置検知システム3のキャリブレーションも終了している。
位置検知システム3は、送信機31と、受信機32と、LPSサーバ30と、を備えている。本実施形態では一例として、位置検知システム3は、送信機311、送信機312及び送信機313(図3参照)の、計3台の送信機31を備えている。また、本実施形態では一例として、位置検知システム3は、受信機321及び受信機322を含む、複数の受信機32を備えている。本実施形態では、複数の送信機311,312,313を特に区別しない場合には、複数の送信機311,312,313の各々を「送信機31」と呼ぶ。同様に、複数の受信機321,322を特に区別しない場合には、複数の受信機321,322の各々を「受信機32」と呼ぶ。
送信機31は、対象空間A1の定位置に設置されている。つまり、図2中に「固定」と表記しているように、送信機31は、固定された状態で使用される。本実施形態では一例として、複数の送信機311,312,313は、それぞれ対象空間A1の天井の適当な位置に設置されている。このような送信機31の取り付けには工事を伴うため、送信機31は、例えば、対象空間A1を含む施設(本実施形態ではオフィス)の新築時又はリフォーム時に設置される。本開示でいう「リフォーム」は、経年劣化等により劣化した施設の修繕だけでなく、施設に新たな機能を追加したり、使い勝手を向上したりするために行うリノベーション(renovation)を含んでいる。
送信機31は、伝送媒体Rw1を送信する機能を有している。本実施形態では一例として、送信機31は、一定時間間隔で、伝送媒体Rw1としての電波を送信(間欠送信)する。さらに、複数の送信機311,312,313のそれぞれは、個別の周波数(チャネル)の電波を伝送媒体Rw1として送信する。送信機31は、アンテナ33を有している。送信機31は、伝送媒体Rw1としての電波を、アンテナ33から送信する。
受信機32は、対象空間A1内を移動し得る対象物である人H1に付されている。受信機32は、一例として、人H1と一体に移動し得る状態で人H1に付されている。受信機32が人H1に付される具体的な態様としては、様々な態様がある。本実施形態では一例として、受信機32は、電子タグであって、人H1の衣服のポケット等に収容されて、人H1に携帯されている。その他、受信機32は、例えば、紐等で人H1が首から提げていてもよいし、人H1が身に着ける装飾品(眼鏡等を含む)に一体化されていてもよい。つまり、図2中に「携帯」と表記しているように、受信機32は、人H1(対象物)に携帯された状態で使用される。したがって、対象物である人H1が対象空間A1内を移動すれば、これに伴って、この人H1が携帯する受信機32も対象空間A1内を移動する。そして、対象空間A1における受信機32の位置は、この受信機32を携帯する人H1(対象物)の位置に相当する。
受信機32は、伝送媒体Rw1を受信する機能を有している。本実施形態では一例として、受信機32は、伝送媒体Rw1としての電波を常時受信する。さらに、受信機32は、複数の送信機311,312,313のいずれから送信された伝送媒体Rw1であるかを、例えば、伝送媒体Rw1の周波数(チャネル)によって区別する。受信機32は、アンテナ34を有している。受信機32は、伝送媒体Rw1としての電波を、アンテナ34にて受信する。
ところで、本実施形態では、受信機32はLPSサーバ30と通信可能に構成されている。つまり、受信機32は、伝送媒体Rw1を受信する機能に加えて、LPSサーバ30との通信機能を有している。さらに、複数の受信機32の各々には、識別情報(ID:Identification)が割り当てられている。識別情報は、各受信機32に固有の情報であって、個々の受信機32を識別するための情報である。言い換えれば、識別情報は、受信機32を携帯する対象物(人H1)ごとに異なっている。
受信機32は、送信機31からの伝送媒体Rw1(無線信号)を受信すると、識別情報を含む位置検知データをLPSサーバ30に送信する。さらに、受信機32は、受信した伝送媒体Rw1の受信強度(RSSI)に関する受信情報を生成し、受信情報を位置検知データに含めてLPSサーバ30に送信する。ここで、受信機32は、複数の送信機311,312,313から伝送媒体Rw1を受信すると、複数の送信機311,312,313の各々についての受信情報を、位置検知データに含めてLPSサーバ30に送信する。
LPSサーバ30は、受信機32から送信された位置検知データに基づいて、対象空間A1内に存在する対象物である人H1の位置を推定する。すなわち、LPSサーバ30は、各受信機32から受信した識別情報及び受信情報の組み合わせを、メモリに記憶されている照合データと照合する。照合データは、例えば、対象空間A1内の各位置と、複数の送信機31の各々からの伝送媒体Rw1の受信状況(受信強度)と、の対応関係を表すデータである。
これにより、LPSサーバ30は、位置検知データに含まれる識別情報の受信機32の対象空間A1での位置を表す位置情報を求めることができる。本実施形態では一例として、位置情報は、対象空間A1内での受信機32の位置、つまり対象空間A1内のどの位置に受信機32があるか、ということを示す情報である。ただし、位置情報は、受信機32の位置に関する情報であればよく、対象空間A1における受信機32の位置を表す情報に限らない。例えば、位置情報は、受信機32がいずれかの送信機31からの無線信号を受信したか否かによって、受信機32が対象空間A1内にあるか対象空間A1外にあるか、という大雑把な受信機32の位置に関する情報であってもよい。
上述したような位置検知システム3においては、測定システム1による伝送媒体Rw1の受信状況の測定結果を用いて、キャリブレーションを行うことで、位置検知システム3の検知精度の向上を図ることができる。本実施形態では、一例として、測定システム1の出力部19から、位置検知システム3のLPSサーバ30に対して、測定データD1が送信されることで、位置検知システム3のキャリブレーションが可能になる。LPSサーバ30は、測定データD1に基づいて、例えば、照合データ内の各種パラメータを設定又は調整することで、キャリブレーションを実行する。
(3)動作
以下、本実施形態に係る測定システム1の動作、つまり本実施形態に係る測定方法について、図3A、図3B、及び図5~図8Bを参照して説明する。
ここで、測定システム1を使用する場面としては、位置検知システム3の運用が開始する前の状態、つまり、対象空間A1内に対象物である人H1が存在しない状態を想定する。この状態において、対象機器4である送信機31は稼働しており、送信機31からは間欠的に伝送媒体Rw1が送信されていることとする。
(3.1)測定方法
図5は、本実施形態に係る測定システム1にて対象空間A1内の各位置での伝送媒体Rw1の受信状況を測定する動作(つまり測定方法)の一例を示すフローチャートである。
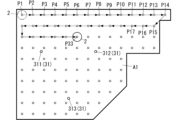
すなわち、測定システム1は、まず、取得部16にて、対象空間A1に関する空間情報を取得する(S1)。それから、測定システム1は、設定部17にて、空間情報が示す対象空間A1の間取り等の情報に基づいて、図3Aに示すように、対象空間A1内に複数の測定点P0を設定する(S2)。ここで、設定部17は、複数の測定点P0の標準的な配置(標準配置)として、格子点状の配置を採用する。つまり、処理S2においては、設定部17が標準配置を採用することにより、図3Aに示すように、平面視において、対象空間A1内に満遍なく測定点P0が配置される。特に、本実施形態では、標準配置としては、縦方向及び横方向に隣接する一対の測定点P0間の距離(間隔)は、一定である。結果的に、n個の測定点が対象空間A1内に設定される。
次に、測定システム1は、複数の測定点P0を本体2が巡回するように、本体2の自律移動を開始する。ここで、複数の測定点P0を本体2が巡回する巡回期間においては、本体2は、図6に示すように、制御部22によって求められた経路(図中で示す経路)に沿って、対象空間A1内を自律移動する。特に、本実施形態では、測定部12は、巡回期間において複数の測定点P0の各々について少なくとも1回は受信状況を測定する。つまり、巡回期間においては、複数の測定点P0の全てを通るように、本体2は、対象空間A1内を移動する。
すなわち、対象空間A1内に設定された複数の測定点P0を、図6に示すように、測定点P1,P2,P3,…Pn(nは自然数)として区別するとすれば、本体2は、これら複数の測定点P1,P2,P3,…Pnを、決められた順に巡回する。ここでは一例として、複数の測定点P1,P2,P3,…Pnの全てを本体2が1回ずつ通るように、図6のような経路が設定される。図6に示す経路によれば、本体2は、複数の測定点P1,P2,P3,…Pnを一筆書きのように通るので、複数の測定点P1,P2,P3,…Pnを効率的に巡回することができる。
具体的には、巡回期間が開始すると、測定システム1では、まずは変数mを「1」に設定し(S3)、対象空間A1内の測定点Pmに相当する位置に本体2を自律移動させる(S4)。測定点Pmに本体2が到達すると、測定点Pmに相当する位置にて本体2は停止(停車)し、この状態で、測定システム1は、対象機器4(送信機31)と伝送部11との間を伝送される伝送媒体Rw1の受信状況を、測定部12で測定する(S5)。このとき、測定部12では、送信機31からなる対象機器4から送信された伝送媒体Rw1の伝送部11での受信強度(RSSI)を、複数の送信機311,312,313の各々について、「受信状況」として測定する。測定部12で測定された受信状況(受信強度)は、測定点Pmに対応付けて記憶部20に記憶される。
受信状況の測定が終了すると、測定システム1では、変数mが「n」に達したか否かを判定する(S6)。ここで、「n」は、複数の測定点P0の個数である。変数mが「n」未満であれば(S6:No)、変数mをインクリメントし(S7)、処理S4に戻る。一方、変数mが「n」に達すると(S6:Yes)、測定システム1は、収集部15にて、複数の測定点P0についての受信状況の測定結果を収集(集計)する(S8)。
上述したような巡回期間における測定システム1の動作(S3~S8)を経て、例えば、下記表1のような、各測定点P1,P2,P3,…Pnでの受信状況(受信強度)を表すデータが生成される。表1において、「本体ID」は本体2に固有の識別子を表し、「送信元ID」は送信機31に固有の識別子を表す。
次に、測定システム1は、表1のようなデータに基づいて、処理部5にて強度分布マップM1を作成する(S9)。ここで、対象機器4として複数の送信機311,312,313がある場合、処理部5は、送信機311,312,313ごとに強度分布マップM1を作成する。つまり、図3Bに示すような強度分布マップM1は、送信機31の数(ここでは3つ)だけ、作成されることになる。そして、測定システム1は、強度分布マップM1を含む測定データD1を、出力部19にて、位置検知システム3(LPSサーバ30)に対して出力する(S10)。
図5のフローチャートは、測定システム1の動作の一例に過ぎず、処理を適宜省略又は追加してもよいし、処理の順番が適宜変更されていてもよい。
(3.2)測定点の変更
次に、測定点P0の変更に係る測定システム1の動作について説明する。
実際に、測定システム1にて対象空間A1内の各位置(測定点P0)での伝送媒体Rw1の受信状況を測定するに際しては、例えば、図7に示すように、対象空間A1内に什器Ob1及び設備Ob2等が設置されているケースがある。そして、このように対象空間A1内に設置された什器Ob1又は設備Ob2等の物体の影響で、本体2が、測定点P0に到達できない、つまり測定点P0に相当する位置に移動できないことがある。言い換えれば、什器Ob1又は設備Ob2等の物体が障害物となり、本体2の移動が妨げられることがある。そこで、本実施形態に係る測定システム1は、このような場合には、変更部18にて測定点P0の設定変更を行う。
変更部18は、基本的には、図7に示すように、什器Ob1又は設備Ob2等の物体を避けるように、測定点P0の移動、追加又は削除を行う。ここでいう「測定点P0の削除」は、測定点P0を無かったことにする態様と、測定点P0としては残しつつ、巡回期間において、削除された測定点P0をスキップする態様と、を含む。いずれの態様であっても、結果的に、削除された測定点P0における受信状況の測定は行われない。
本実施形態では特に、本体2が対象空間A1を実際に自律移動する際に、推定部14が、SLAMのように自己位置推定と環境地図作成とを同時に実行する。このような推定部14によれば、検知部13の検知結果、つまり本体2の周囲の状況(構造体又は物体の有無等)に基づいて、自己位置の推定に加えて、環境地図の作成が行われる。ここでいう「環境地図」は、検知部13の検知結果を反映して作成される対象空間A1の地図であって、例えば、図7に示すように、対象空間A1に配置された什器Ob1又は設備Ob2等の物体の配置を反映した地図である。本実施形態では、変更部18は、このような環境地図に基づいて、什器Ob1又は設備Ob2等の物体を避けるように、測定点P0の移動、追加又は削除を行う。環境地図は検知部13の検知結果を反映しているので、変更部18は、間接的に、検知部13の検知結果に基づいて、設定変更を行うことになる。
具体的には、変更部18は、本体2が対象空間A1を実際に自律移動しつつ、本体2の周囲をセンシングすることで得られた環境地図と、取得部16が取得した対象空間A1に関する空間情報と、を比較する。ここで、例えば、対象空間A1に什器Ob1又は設備Ob2等の物体が何ら設置されておらず、環境地図と空間情報との間にほとんど差異がない場合、変更部18は、測定点P1の変更を行わない。
一方、例えば、対象空間A1に什器Ob1又は設備Ob2等の物体が設置され、環境地図と空間情報との間に差異が生じている場合には、変更部18は、測定点P1の変更を行う。
このとき、変更部18は、以下のような変更条件に従って、測定点P1の設定変更を行う。変更条件の一例として、対象空間A1内に存在する什器Ob1又は設備Ob2等の物体と重複する測定点P1については、その物体の近傍であって、かつ本体2が到達し得る位置に移動するか、削除する。また、変更条件の他の例として、対象空間A1内に存在する什器Ob1又は設備Ob2等の物体が障害となり、本体2が到達し得ない領域にある測定点P1については、その領域の近傍であって、かつ本体2が到達し得る位置に移動するか、削除する。さらに、変更条件の他の例として、対象空間A1内に複数の物体(什器Ob1又は設備Ob2等)が存在し、これら複数の物体間での伝送媒体Rw1の反射が生じ得る場合には、これら複数の物体間であって、かつ本体2が到達し得る位置に測定点P0を追加する。
測定システム1は、上述のように変更された変更後の複数の測定点P0について、「(3.1)測定方法」の欄で説明した手順に従って、伝送媒体Rw1の受信状況を測定する。
そのため、本実施形態では、基本的に、変更部18は、巡回期間より前の変更期間において、複数の測定点P0を本体2が巡回する際に設定変更を行う。すなわち、測定部12による伝送媒体Rw1の受信状況の測定を行う巡回期間に先駆けて、変更期間にて、本体2が対象空間A1を実際に自律移動して環境地図を得る。環境地図を得るための変更期間には、測定部12による伝送媒体Rw1の受信状況の測定は実施しない。これにより、巡回期間よりも前の変更期間において、環境地図(検知部13の検知結果)に基づいて、測定点P0の設定変更が可能となる。これにより、巡回期間においては、事前に設定変更された複数の測定点P0を本体2が巡回しつつ、測定部12にて伝送媒体Rw1の受信状況の測定を行うことができる。
ただし、この例に限らず、変更部18は、巡回期間において設定変更を行ってもよい。この場合、測定部12による伝送媒体Rw1の受信状況の測定を行う巡回期間に、本体2が対象空間A1を自律移動しつつ環境地図を得ることになる。言い換えれば、測定システム1は、伝送媒体Rw1の受信状況を測定しながら、環境地図(検知部13の検知結果)に基づいて、変更部18にて測定点P0の設定変更を行う。これにより、1回の巡回期間において、測定点P0の設定変更と、伝送媒体Rw1の受信状況の測定と、をまとめて実行することが可能となる。
また、本実施形態では、上述したように、処理部5は、所定の処理として、強度分布マップM1の作成に代えて、又は加えて、物体(什器Ob1又は設備Ob2等)のレイアウト変更の提案を実行可能に構成されている。そこで、処理部5は、例えば、測定部12の測定結果を、上述した環境地図と照らし合わせることにより、什器Ob1又は設備Ob2等のレイアウトの変更を提案する提案情報を生成してもよい。提案情報は、什器Ob1又は設備Ob2等の物体のレイアウトの変更を示唆する情報であればよく、具体的には、例えば、伝送媒体Rw1の受信状況が改善するための、什器Ob1のレイアウト変更後の位置及び向きを示す情報である。この場合、出力部19は、提案情報を、測定データD1として、例えば、作業者(人)に提示する態様で出力する。
(3.3)測定点の設定条件
次に、測定点P0の設定条件について、もう少し詳しく説明する。
測定点の設定条件として、複数の測定点P0は、対象空間A1を規定する構造体(壁、床、柱又は天井等)及び対象空間A1内の物体(什器Ob1又は設備Ob2等)の少なくとも一方に応じて設定されてもよい。このような設定条件に基づいて設定される測定点P0の一例を、図8A及び図8Bに示す。図8A及び図8Bにおいて、測定点P0は標準配置の測定点であって、網掛け(ドットハッチング)を付した測定点Pr0は、上記設定条件に従って設定された測定点である。
図8Aの例では、対象空間A1を規定する構造体としての壁A12を基準として、複数の測定点Pr0が設定されている。ここでは特に、壁A12に沿って複数の測定点Pr0が並べて配置されている。設定条件に従って設定された複数の測定点Pr0は、標準配置の複数の測定点P0に比べて、隣接する一対の測定点Pr0間の間隔が狭い。これにより、標準配置では、対象空間A1を規定する構造体の周辺に測定点P0が存在しない場合であっても、構造体の周辺に測定点Pr0を設定することが可能である。
また、図8Bの例では、対象空間A1内の物体である什器Ob1(ここでは一例として机)を基準として、複数の測定点Pr0が設定されている。ここでは特に、什器Ob1の特徴点である四隅のそれぞれに測定点Pr0が配置されている。さらに、図8Bの例では、測定点P1の設定変更の場面を想定している。そのため、標準配置の複数の測定点P0のうち什器Ob1に重複する測定点Pd0については、変更条件に従って削除されている。これにより、標準配置では、対象空間A1内の物体(什器Ob1)の周辺に測定点P0が存在しない場合であっても、物体の周辺であって、特にその特徴点付近に測定点Pr0を設定することが可能である。
上述したように、構造体と物体との少なくとも一方を基準として測定点Pr0が設定されることで、伝送媒体Rw1の反射又は吸収が生じやすい構造体又は物体の周辺について、重点的に伝送媒体Rw1の受信状況を測定可能となる。
(4)その他
図9は、本実施形態に係る測定システム1が対象空間A1に配置されている状態の概略側面図である。
図9から明らかなように、測定システム1における検知部13の走行面A11(床面)からの高さL2は、什器Ob1の高さL1に比べて大きい(L2>L1)。対象空間A1が設定される施設がオフィスであれば、一般的な什器Ob1の高さは720mmである。そのため、本実施形態では一例として、検知部13は、走行面A11から720mmよりも高い位置(高さL2)に、配置されている。これにより、検知部13では、例えば、本体2と壁A12(図8B参照)等の構造物との間に什器Ob1がある場合でも、什器Ob1の奥にある壁A12等の構造物を検知可能となる。結果的に、推定部14での自己位置の推定精度が向上する。
さらに、本実施形態では、伝送部11のアンテナ111は検知部13の上面から突出している。そのため、検知部13の高さL2が什器Ob1の高さL1に比べて大きいことで、アンテナ111が什器Ob1の影響を受けにくいという利点もある。
(5)変形例
実施形態1は、本開示の様々な実施形態の一つに過ぎない。実施形態1は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。本開示において説明する各図は、模式的な図であり、各図中の各構成要素の大きさ及び厚さそれぞれの比が、必ずしも実際の寸法比を反映しているとは限らない。また、実施形態1に係る測定システム1と同様の機能は、測定方法、コンピュータプログラム、又はコンピュータプログラムを記録した非一時的記録媒体等で具現化されてもよい。一態様に係る測定方法は、伝送処理と、測定処理(図5の「S3~S8」に相当)と、を有する。伝送処理は、本体2に搭載された伝送部11にて、対象機器4との間で伝送媒体Rw1の送信と受信との少なくとも一方を行う処理である。本体2は、複数の測定点P0が設定される対象空間A1内を自律移動可能である。測定処理は、複数の測定点P0を本体2が巡回する巡回期間において、各測定点P0に本体2が位置するときの対象機器4と伝送部11との間を伝送される伝送媒体Rw1の受信状況を、各測定点P0に対応付けて測定する処理である。一態様に係る(コンピュータ)プログラムは、上記の測定方法を、1以上のプロセッサに実行させるためのプログラムである。
以下、実施形態1の変形例を列挙する。以下に説明する変形例は、適宜組み合わせて適用可能である。
本開示における測定システム1は、コンピュータシステムを含んでいる。コンピュータシステムは、ハードウェアとしてのプロセッサ及びメモリを主構成とする。コンピュータシステムのメモリに記録されたプログラムをプロセッサが実行することによって、本開示における測定システム1としての機能が実現される。プログラムは、コンピュータシステムのメモリに予め記録されてもよく、電気通信回線を通じて提供されてもよく、コンピュータシステムで読み取り可能なメモリカード、光学ディスク、ハードディスクドライブ等の非一時的記録媒体に記録されて提供されてもよい。コンピュータシステムのプロセッサは、半導体集積回路(IC)又は大規模集積回路(LSI)を含む1ないし複数の電子回路で構成される。ここでいうIC又はLSI等の集積回路は、集積の度合いによって呼び方が異なっており、システムLSI、VLSI(Very Large Scale Integration)、又はULSI(Ultra Large Scale Integration)と呼ばれる集積回路を含む。さらに、LSIの製造後にプログラムされる、FPGA(Field-Programmable Gate Array)、又はLSI内部の接合関係の再構成若しくはLSI内部の回路区画の再構成が可能な論理デバイスについても、プロセッサとして採用することができる。複数の電子回路は、1つのチップに集約されていてもよいし、複数のチップに分散して設けられていてもよい。複数のチップは、1つの装置に集約されていてもよいし、複数の装置に分散して設けられていてもよい。ここでいうコンピュータシステムは、1以上のプロセッサ及び1以上のメモリを有するマイクロコントローラを含む。したがって、マイクロコントローラについても、半導体集積回路又は大規模集積回路を含む1ないし複数の電子回路で構成される。
また、測定システム1の少なくとも一部の機能が、1つの筐体内に集約されていることは測定システム1に必須の構成ではなく、測定システム1の構成要素は、複数の筐体に分散して設けられていてもよい。例えば、測定システム1のうちの収集部15、取得部16、設定部17、変更部18、出力部19、記憶部20及び処理部5の少なくとも一部は、本体2とは別の筐体に設けられていてもよい。さらに、測定システム1の少なくとも一部の機能、例えば、収集部15、取得部16、設定部17、変更部18、出力部19、記憶部20及び処理部5の少なくとも一部の機能がクラウド(クラウドコンピューティング)等によって実現されてもよい。
反対に、実施形態1において、複数の装置に分散されている少なくとも一部の機能が、1つの筐体内に集約されていてもよい。例えば、本体2と検知部13とに分散されている機能が、1つの筐体内に集約されていてもよい。
実施形態1では、測定システム1は、対象機器4である送信機31を構成要素に含まない。ただし、対象機器4である送信機31は、測定システム1の構成要素に含まれていてもよい。
また、測定システム1は、本体2と、伝送部11と、測定部12と、検知部13と、推定部14と、収集部15と、取得部16と、設定部17と、変更部18と、出力部19と、記憶部20と、処理部5と、の全てを備えることは必須ではない。例えば、推定部14と出力部19と記憶部20とのうちの少なくとも1つは、適宜省略可能である。
一例として、推定部14が省略される場合、本体2は、例えば、予め定められた経路に沿って移動することで、自己位置を推定しなくても、複数の測定点P0を巡回することが可能である。例えば、対象空間A1の床面等からなる走行面A11上に、経路及び測定点を示す、光学的又は磁気的なマーカ等が設置(又は表記)されていれば、自己位置の推定を行わずとも、本体2は、自律移動可能である。つまり、この場合、本体2は、自己位置を推定しなくても、マーカを頼りに経路に沿って移動しつつ、複数の測定点P0を巡回することが可能である。
また、測定システム1の用途は、位置検知システム3のキャリブレーションに限らない。すなわち、測定システム1によれば、対象空間A1内の各位置における伝送媒体Rw1の受信状況を測定できるので、その測定結果は様々な用途に利用できる。一例として、測定システム1で生成される強度分布マップM1を用いて、位置検知システム3での対象物を検知可能な領域の推定が可能である。または、例えば、Wi-Fi(登録商標)等のアクセスポイントからの送信される電波(伝送媒体Rw1)の強度分布マップM1を測定システム1で生成することで、強度分布マップM1から、アクセスポイントに接続可能な領域の推定も可能となる。
また、本体2の動力源は電動機に限らず、例えば、原動機等、電気エネルギ以外のエネルギで動力を発生する装置であってもよい。
また、測定システム1の動作用の電力は、バッテリ23から供給される構成に限らず、例えば、本体2がケーブル等でコンセントに接続されることにより、測定システム1の動作用の電力が系統電源(商用電源)から供給される構成であってもよい。
また、推定部14は、検知部13の検知結果に基づいて、自己位置(本体2の現在位置)を推定する構成に限らない。例えば、推定部14は、GPS(Global Positioning System)等の衛星測位システムを用いて、自己位置(本体2の現在位置)を推定してもよい。あるいは、推定部14は、例えば、対象空間A1内での本体2の位置を俯瞰的に監視する上位システムからの通知等に基づいて、自己位置(本体2の現在位置)を推定してもよい。
また、測定部12は、複数の測定点P0を本体2が巡回する巡回期間において、各測定点P0に本体2が位置するときの「受信状況」を測定点P0ごとに対応付けて測定すればよく、1つの測定点P0について、複数回、受信状況を測定してもよい。この場合、1つの測定点P0についての複数回の測定に係る測定値の代表値、例えば、平均値、中央値又は最頻値等が、この測定点P0についての測定結果として採用されることが好ましい。
また、取得部16が取得する空間情報は、対象空間A1に配置される什器Ob1又は設備Ob2等の物体に関する情報を含んでいてもよい。この場合、設定部17は、空間情報に基づいて対象空間A1に複数の測定点P0を設定することで、例えば、什器Ob1及び設備Ob2等の、対象空間A1内の物体の配置等を考慮して、対象空間A1に複数の測定点P0を設定できる。具体的には、設定部17は、例えば、什器Ob1及び設備Ob2等と重複しないように、対象空間A1内の物体を避けた位置に複数の測定点P0を設定できる。
また、対象空間A1に設定される複数の測定点P0は、設定部17で自動的に設定される構成に限らず、人(作業者等)が手動で複数の測定点P0を設定してもよい。この場合、例えば、作業者は、スマートフォン又はタブレット端末等の情報端末の画面に、対象空間A1の間取り等の空間情報を表示させた状態で、対象空間A1の任意の位置に測定点P0を設定する。情報端末で設定された複数の測定点P0の、対象空間A1内での配置の情報が、例えば、空間情報と共に情報端末から測定システム1に送信されることにより、作業者が設定した複数の測定点P0が測定システム1に反映される。
また、出力部19による測定データD1の出力の態様は、位置検知システム3への出力(送信)に限らない。例えば、出力部19は、測定データD1を、位置検知システム3以外のシステムに対して通信により出力(送信)してもよいし、その他、非一時的記録媒体への書き出し及びプリントアウト等の態様で出力してもよい。さらに、出力部19は、例えば、表示、(作業者が所有する)情報端末への送信、音(音声及びアラーム音等を含む)出力、光出力(点滅等を含む)及びプリントアウト等の手段で、測定データD1を人(作業者等)に対して出力(提示)してもよい。
また、測定点P0の標準配置は、格子点状の配置に限らず、例えば、千鳥状(zigzag pattern)の配置であってもよい。さらに、標準配置において、縦方向及び横方向に隣接する一対の測定点P0間の距離(間隔)は、一定でなく、ばらつきがあってもよい。また、標準配置において、縦方向及び横方向に隣接する一対の測定点P0間の距離(間隔)、測定点P0の数等は、人(作業者)が調節可能であってもよい。
また、対象機器4(送信機31)の数は複数に限らず、1つだけであってもよい。
また、本体2は、対象空間A1内を自律移動する構成であればよく、走行面A11上を走行する構成に限らず、例えば、ドローンのように飛行により自律移動する構成であってもよい。
(実施形態2)
本実施形態に係る測定システム1Aは、図10に示すように、位置検知システム3Aの受信機32が対象機器4である点で、実施形態1に係る測定システム1と相違する。以下、実施形態1と同様の構成については共通の符号を付して適宜説明を省略する。
すなわち、本実施形態では、位置検知システム3Aは、送信機31ではなく受信機32が、対象空間A1の定位置に設置されている。一方、受信機32でなく送信機31が、対象空間A1内を移動し得る対象物である人H1に付されている。さらに、複数の送信機31の各々には、識別情報が割り当てられている。
受信機32は、送信機31からの伝送媒体Rw1(無線信号)を受信すると、識別情報を含む位置検知データをLPSサーバ30に送信する。さらに、受信機32は、受信した伝送媒体Rw1の受信強度(RSSI)に関する受信情報を生成し、受信情報を位置検知データに含めてLPSサーバ30に送信する。LPSサーバ30は、受信機32から送信された位置検知データに基づいて、対象空間A1内に存在する対象物である人H1の位置を推定する。
このような位置検知システム3Aのキャリブレーションの用途で用いられる測定システム1Aにおいては、伝送部11は、伝送媒体Rw1を送信する機能(送信機能)を少なくとも有している。つまり、伝送部11は、対象機器4である受信機32に対して、アンテナ111から伝送媒体Rw1を送信する機能を有している。
そして、対象機器4が伝送媒体Rw1を受信する受信機32であるため、受信機32での伝送媒体Rw1の受信強度が、対象機器4と伝送部11との間を伝送される伝送媒体Rw1の「受信状況」となる。つまり、本実施形態では、測定部12が測定する伝送媒体Rw1の受信状況は、対象機器4である受信機32での伝送媒体Rw1の受信強度となる。そのため、測定部12は、例えば、測定システム1Aと受信機32との間の通信により、伝送媒体Rw1の受信状況(受信強度)を受信機32から取得する。
また、実施形態2において、伝送部11は、伝送媒体Rw1を受信する機能(受信機能)を更に有していてもよい。この場合、測定システム1Aは、対象機器4が受信機32である場合にも、対象機器4が送信機31である場合にも、適用可能となる。
実施形態2で説明した種々の構成(変形例を含む)は、実施形態1で説明した種々の構成(変形例を含む)と適宜組み合わせて採用可能である。
(実施形態3)
本実施形態に係る測定システム1Bは、図11に示すように、その構成要素が下位システム101と上位システム102とに分散している点で、実施形態1に係る測定システム1と相違する。以下、実施形態1と同様の構成については共通の符号を付して適宜説明を省略する。
すなわち、本実施形態では、測定システム1Bは、下位システム101と、上位システム102と、を備えている。さらに、測定システム1Bは、下位システム101を複数(ここでは3つ)備えている。各下位システム101は、上位システム102と通信可能に構成されている。図11では、複数の下位システム101のうちの1つの下位システム101についてのみ内部構成を図示しているが、他の下位システム101についても同様の構成である。
下位システム101は、本体2と、伝送部11と、測定部12と、検知部13と、推定部14と、を備えている。上位システム102は、残りの構成要素、つまり、収集部15、取得部16、設定部17、変更部18、出力部19、記憶部20及び処理部5を備えている。下位システム101の構成要素は全て本体2に集約されている。つまり、下位システム101の外観は、実施形態1に係る測定システム1と同等である。上位システム102は、一例として、サーバにて実現される。ここで、上位システム102の「上位」、及び下位システム101の「下位」は、単に、両者を区別するためのラベルとして用いているのであって、各々の地位及び順位等を特定する意味ではない。
本実施形態のように、1つの上位システム102に対して、複数の下位システム101(本体2)が設けられている構成では、対象空間A1内に設定された複数の測定点P0を、複数の本体2で手分けして巡回することができる。例えば、複数の測定点P0を、第1グループ、第2グループ及び第3グループに3分割した場合に、第1グループに属する測定点P0と、第2グループに属する測定点P0と、第2グループに属する測定点P0と、を別々の本体2で巡回することができる。
この場合においても、複数の測定点P0の各々で測定された受信状況(受信強度)は、複数の下位システム101から1つの上位システム102に送信され、上位システム102の収集部15にて収集される。そのため、測定システム1B全体としてみれば、実施形態1に係る測定システム1と同等の機能を実現可能である。
実施形態3で説明した種々の構成(変形例を含む)は、実施形態1又は2で説明した種々の構成(変形例を含む)と適宜組み合わせて採用可能である。
(まとめ)
以上説明したように、第1の態様に係る測定システム(1,1A,1B)は、本体(2)と、伝送部(11)と、測定部(12)と、を備える。本体(2)は、複数の測定点(P0)が設定される対象空間(A1)内を自律移動可能である。伝送部(11)は、本体(2)に搭載される。伝送部(11)は、対象機器(4)との間で伝送媒体(Rw1)の送信と受信との少なくとも一方を行う。測定部(12)は、複数の測定点(P0)を本体(2)が巡回する巡回期間において、各測定点(P0)に本体(2)が位置するときの対象機器(4)と伝送部(11)との間を伝送される伝送媒体(Rw1)の受信状況を、各測定点(P0)に対応付けて測定する。
この態様によれば、各測定点(P0)での伝送媒体(Rw1)の受信状況の測定作業を、対象空間(A1)内を自律移動可能な本体(2)にて実行することができる。つまり、測定システム(1,1A,1B)では、作業者に代えて又は作業者と共に、対象空間(A1)内の複数の測定点(P0)での伝送媒体(Rw1)の受信状況を測定できるので、作業者の作業負担を減らすことができる。しかも、伝送部(11)を搭載した本体(2)は、対象空間(A1)内を自律移動するので、受信状況を測定する位置が測定点(P0)からずれにくく、測定結果の信頼性も低下しにくい。結果的に、対象空間(A1)内の各位置における伝送媒体(Rw1)の受信状況の把握が容易になる、という利点がある。
第2の態様に係る測定システム(1,1A,1B)は、第1の態様において、取得部(16)を更に備える。取得部(16)は、対象空間(A1)に関する空間情報を取得する。
この態様によれば、本体(2)が自律移動すべき対象空間(A1)の情報を把握することが可能である。
第3の態様に係る測定システム(1,1A,1B)は、第2の態様において、設定部(17)を更に備える。設定部(17)は、空間情報に基づいて、対象空間(A1)に複数の測定点(P0)を設定する。
この態様によれば、複数の測定点(P0)を設定する手間を軽減できる。
第4の態様に係る測定システム(1,1A,1B)は、第1~3のいずれかの態様において、処理部(5)を更に備える。処理部(5)は、測定部(12)の測定結果に基づいて、所定の処理を実行する。
この態様によれば、測定部(12)の測定結果を利用して、何らかの処理を実現することが可能となる。
第5の態様に係る測定システム(1,1A,1B)では、第4の態様において、所定の処理は、対象空間(A1)内の物体のレイアウトの提案を含む。
この態様によれば、対象空間(A1)内の物体のレイアウトの変更により、例えば、伝送媒体(Rw1)の受信状況の改善を支援できる。
第6の態様に係る測定システム(1,1A,1B)は、第1~5のいずれかの態様において、変更部(18)を更に備える。変更部(18)は、対象空間(A1)に設定されている複数の測定点(P0)の少なくとも1つについて設定変更を行う。
この態様によれば、測定点(P0)の配置を適切な配置に適宜変更可能となる。
第7の態様に係る測定システム(1,1A,1B)は、第6の態様において、検知部(13)を更に備える。検知部(13)は、本体(2)に搭載され、本体(2)の周囲の状況を検知する。変更部(18)は、検知部(13)の検知結果に基づいて、設定変更を行う。
この態様によれば、例えば、対象空間(A1)の実際の状況に応じて、測定点(P0)の配置を適切な配置に適宜変更可能となる。
第8の態様に係る測定システム(1,1A,1B)では、第7の態様において、変更部(18)は、巡回期間において設定変更を行う。
この態様によれば、測定点(P0)の設定変更と、伝送媒体(Rw1)の受信状況の測定と、をまとめて実行することが可能となる。
第9の態様に係る測定システム(1,1A,1B)では、第7の態様において、変更部(18)は、巡回期間より前の変更期間において、複数の測定点(P0)を本体(2)が巡回する際に設定変更を行う。
この態様によれば、巡回期間においては、事前に設定変更された複数の測定点(P0)を本体(2)が巡回しつつ、測定部(12)にて伝送媒体(Rw1)の受信状況の測定を行うことができる。
第10の態様に係る測定システム(1,1A,1B)では、第1~9のいずれかの態様において、複数の測定点(P0)は、対象空間(A1)を規定する構造体及び対象空間(A1)内の物体の少なくとも一方に応じて設定されている。
この態様によれば、例えば、伝送媒体(Rw1)の反射又は吸収が生じやすい構造体又は物体の周辺について、重点的に伝送媒体(Rw1)の受信状況を測定可能となる。
第11の態様に係る測定システム(1,1A,1B)では、第1~10のいずれかの態様において、測定部(12)は、巡回期間において複数の測定点(P0)の各々について少なくとも1回は受信状況を測定する。
この態様によれば、対象空間(A1)内に設定された複数の測定点(P0)での受信状況を満遍なく測定可能である。
第12の態様に係る測定システム(1,1A,1B)は、第1~11のいずれかの態様において、収集部(15)を更に備える。収集部(15)は、複数の測定点(P0)についての受信状況の測定結果を収集する。
この態様によれば、複数の測定点(P0)についての受信状況の測定結果を1つのデータにまとめることができる。
第13の態様に係る測定方法は、伝送処理と、測定処理と、を有する。伝送処理は、伝送部(11)にて、対象機器(4)との間で伝送媒体(Rw1)の送信と受信との少なくとも一方を行う処理である。伝送部(11)は、複数の測定点(P0)が設定される対象空間(A1)内を自律移動可能な本体(2)に搭載される。測定処理は、複数の測定点(P0)を本体(2)が巡回する巡回期間において、各測定点(P0)に本体(2)が位置するときの受信状況を、各測定点(P0)に対応付けて測定する処理である。受信状況は、対象機器(4)と伝送部(11)との間を伝送される伝送媒体(Rw1)の受信状況である。
この態様によれば、対象空間(A1)内の各位置における伝送媒体(Rw1)の受信状況の把握が容易になる、という利点がある。
第14の態様に係るプログラムは、第13の態様に係る測定方法を、1以上のプロセッサに実行させるためのプログラムである。
この態様によれば、対象空間(A1)内の各位置における伝送媒体(Rw1)の受信状況の把握が容易になる、という利点がある。
上記態様に限らず、実施形態1、実施形態2及び実施形態3に係る測定システム(1,1A,1B)の種々の構成(変形例を含む)は、測定方法又はプログラムにて具現化可能である。
第2~12の態様に係る構成については、測定システム(1,1A,1B)に必須の構成ではなく、適宜省略可能である。