[第1実施形態]
以下、図1~図6を参照して、第1実施形態に係るレシプロソー101について説明する。レシプロソー101は、取り外し可能に装着された薄板状のブレード91を、駆動軸A1に沿って往復動することで、被加工材(例えば、木材)の切断作業を遂行するように構成された手持ち式の電動工具である。なお、レシプロソーは、セーバーソーとも称される。
まず、レシプロソー101の概略構成について説明する。
図1に示すように、レシプロソー101の外郭は、主として、本体ハウジング11と、ハンドル18とによって形成されている。
本体ハウジング11は、長尺の矩形箱状の中空体であって、モータ21、駆動機構3等を収容する。本体ハウジング11の長軸方向における一端部からは、ブレード装着部353が突出している。ブレード装着部353は、ブレード91を取り外し可能に保持するように構成されている。なお、ブレード91の駆動軸A1は、本体ハウジング11の長軸と平行に延在する。
ハンドル18は、長尺の筒状体である。ハンドル18は、本体ハウジング11の長軸方向における他端部(ブレード装着部353とは反対側の端部)から、本体ハウジング11の長軸に対して斜めに延びている。ハンドル18は、使用者がハンドル18の概ね全体を把持できるように構成されている。ハンドル18のうち、ハンドル18の突出側(本体ハウジング11とは反対側)の端部には、バッテリ装着部187が設けられている。バッテリ装着部187は、レシプロソー101の電源としての充電式のバッテリ(バッテリパックともいう)93を着脱可能に構成されている。
本実施形態では、ハンドル18が、使用者が片手で把持できるように構成されているのに加え、本体ハウジング11も、使用者が片手で把持できるように構成されている。そして、本体ハウジング11およびハンドル18の夫々に、モータ21の起動用のスイッチレバー119およびトリガ181が設けられている。使用者がスイッチレバー119およびトリガ181の何れか一方を押圧操作すると、モータ21が通電されて、駆動機構3によって、ブレード91が駆動軸A1に沿って往復動される。
以下、レシプロソー101の詳細構成について説明する。なお、以下の説明では、便宜上、駆動軸A1の延在方向(本体ハウジング11の長軸方向でもある)を、レシプロソー101の前後方向と規定する。前後方向において、ブレード装着部353が設けられている一端部側をレシプロソー101の前側、反対側(ハンドル18側)を後側と規定する。駆動軸A1に直交し、且つ、薄板状のブレード91の板面に略平行な方向を、レシプロソー101の上下方向と規定する。上下方向において、通常使用時にブレード91の刃先が配置される側(スイッチレバー119、ハンドル18の突出端が配置される側でもある)を下側、反対側を上側と規定する。更に、前後方向および上下方向に直交する方向を、レシプロソー101の左右方向と規定する。
まず、本体ハウジング11の内部構造について説明する。図1に示すように、本体ハウジング11の内部には、モータ21と、駆動機構3とが収容されている。より詳細には、モータ21は、本体ハウジング11の後半部分に収容され、駆動機構3は、モータ21の前側で本体ハウジング11の前半部分に収容されている。以下、本体ハウジング11のうち、駆動機構3が収容される前半部分を駆動機構収容部111といい、モータ21が収容される後半部分をモータ収容部116という。
本実施形態では、モータ21には、ブラシを有する直流モータが採用されている。詳細は図示しないが、モータ21は、ケース22に収容されたステータと、ステータの内側に配置され、出力シャフト23(図2参照)を有するロータとを含む。モータ21は、出力シャフト23の回転軸が前後方向に延在するように配置されている。出力シャフト23の前端部には、小ベベルギヤ231が固定されている。小ベベルギヤ231は、駆動機構収容部111内に突出している。
駆動機構3は、モータ21の出力シャフト23の回転運動を直線運動に変換し、ブレード91を往復動させるように構成された運動変換機構である。本実施形態の駆動機構3の構成は公知であるため、詳細な図示は省略するが、簡単に説明する。図2に示すように、駆動機構3は、大ベベルギヤ31と、偏心ピン33と、スライダ35とを含む。
大ベベルギヤ31は、小ベベルギヤ231に対して右側で、左右方向に延在する回転軸周りに回転可能に支持され、小ベベルギヤ231に噛合している。偏心ピン33は、大ベベルギヤ31の回転軸から偏心した位置に設けられ、大ベベルギヤ31から左方へ突出している。長尺状のスライダ35は、駆動軸A1に沿って、前後方向に延在するように配置されている。スライダ35は、筒状のガイドスリーブ36によって、前後方向に摺動可能に保持されている。スライダ35の後端部には、左右方向に延在する長穴351が設けられている。偏心ピン33は、長穴351内を移動可能に配置されている。スライダ35の前端部は、ブレード装着部353として構成されており、本体ハウジング11から前方へ突出している。
モータ21が駆動されると、小ベベルギヤ231を介して大ベベルギヤ31が回転され、偏心ピン33が、大ベベルギヤ31の回転軸周りを周回する。これに伴い、長穴351を介して偏心ピン33に連結されたスライダ35が、ガイドスリーブ36に案内され、駆動軸A1に沿って前後方向に往復動される。よって、ブレード装着部353に装着されたブレード91も、スライダ35と一体的に、駆動軸A1に沿って前後方向に往復動される。
次に、ハンドル18の内部構造について説明する。
図1に示すように、ハンドル18の基端部(本体ハウジング11に接続する側の端部)内には、モータ21の起動用のスイッチ183が収容されている。スイッチ183は、常時にはオフ状態で維持されている。本体ハウジング11に設けられたスイッチレバー119、および、ハンドル18の基端部に設けられたトリガ181の何れか一方が押圧操作されると、スイッチ183のプランジャが作動レバー184を介して押し込まれ、スイッチ183は、オン状態となる。スイッチ183がオン状態となると、モータ21が通電される。
このように、本実施形態のレシプロソー101は、モータ21の起動用に、スイッチレバー119およびトリガ181という2つの操作部材を有する。よって、使用者は、本体ハウジング11を片手で把持してもよいし、ハンドル18を片手で把持してもよい。また、使用者は、一方の手でハンドル18を把持し、もう一方の手で本体ハウジング11の前端部を補助的に把持することもできる。つまり、本体ハウジング11の前端部は、補助的なグリップ部115としても機能する。このため、グリップ部115は、片手で握りやすい太さとされている。なお、本実施形態では、グリップ部115の外周面はエラストマで被覆されている。
ハンドル18の先端部(突出側の端部)は、矩形箱状に形成されており、バッテリ装着部187を有する。バッテリ装着部187は、バッテリ93にスライド係合可能な係合構造と、バッテリ93に電気的に接続可能な端子等を有する。このようなバッテリ装着部187の構成は周知であるため、詳細な図示および説明は省略する。
なお、本実施形態では、本体ハウジング11およびハンドル18は、連続的に形成されている。より詳細には、本体ハウジング11およびハンドル18は、合成樹脂製の左右一対の半割体がネジで互いに連結されることで形成されている。
ところで、レシプロソー101では、モータ21および駆動機構3の駆動に伴って、モータ21および駆動機構3には振動が生じる。そこで、本実施形態のレシプロソー101は、この振動が、使用者によって把持される本体ハウジング11およびハンドル18に伝達されることを抑制するための防振構造を備えている。以下、レシプロソー101の防振構造について説明する。
図2に示すように、本実施形態では、上述の駆動機構3は、ギヤハウジング15に収容された状態で、本体ハウジング11内(より詳細には、駆動機構収容部111内)に配置されている。更に、複数の弾性体51~54が、本体ハウジング11とギヤハウジング15との間に介在配置されている。言い換えると、本体ハウジング11とギヤハウジング15とは、相対移動可能に弾性連結されている。以下、ギヤハウジング15の弾性連結構造について説明する。
ギヤハウジング15は、長尺の中空体である。本実施形態では、ギヤハウジング15は、金属製の左右一対の半割体が、ネジで互いに連結されることで形成されている。ギヤハウジング15は、本体ハウジング11内で、モータ21の前側に(つまり、駆動機構収容部111内に)、駆動軸A1に沿って前後方向に延在するように配置されている。ギヤハウジング15の前半部分は、グリップ部115内に配置されている。ギヤハウジング15の前半部分は、スライダ35を前後方向に摺動案内するガイドスリーブ36を保持する。ギヤハウジング15の後半部分は、大ベベルギヤ31および偏心ピン33、ならびに小ベベルギヤ231を収容する。以下、ギヤハウジング15の前半部分および後半部分を、夫々、ガイド収容部151およびギヤ収容部156という。
ガイド収容部151およびギヤ収容部156の周囲には、夫々2箇所ずつ、弾性体51~54の受け部511、521、531および541が設けられている。より詳細には、ガイド収容部151の後端部には、上下一対の受け部511および521が設けられている。受け部511および521は、ガイド収容部151の外周部の一部であって、断面略半円状に形成されている。上側の受け部511は上方へ突出する一方、下側の受け部521は下方へ突出している。ギヤ収容部156の後端部には、上下一対の受け部531および541が設けられている。受け部531および541は、ギヤ収容部156の外周部の一部であって、断面略半円状に形成されている。上側の受け部531は上方へ突出する一方、下側の受け部541は下方へ突出している。
一方、本体ハウジング11の内部には、ガイド収容部151の受け部511および521に夫々対向するように、受け部512および522が設けられている。受け部512および522は、本体ハウジング11の内側に(ギヤハウジング15に向けて)突出するリブであって、夫々、受け部511および521に対応する形状を有する。また、ギヤ収容部156の受け部531および541に夫々対向するように、受け部532および542が設けられている。受け部532および542は、夫々、受け部531および541に対応する形状のリブとして構成されている。
弾性体51は、受け部511と受け部512の間の隙間に対応する形状を有し、僅かに圧縮された状態(荷重がかけられた状態)で、受け部511と受け部512の間に配置されている。弾性体52は、受け部521と受け部522の間の隙間に対応する形状を有し、僅かに圧縮された状態で、受け部521と受け部522の間に配置されている。弾性体53は、受け部531と受け部532の間の隙間に対応する形状を有し、僅かに圧縮された状態で、受け部531と受け部532の間に配置されている。弾性体54は、受け部541と受け部542の間の隙間に対応する形状を有し、僅かに圧縮された状態で、受け部541と受け部542の間に配置されている。なお、本実施形態では、弾性体51~54はゴム製である。
また、本実施形態では、モータ21は、ギヤハウジング15に固定され、ギヤハウジング15と一体化された状態で、本体ハウジング11内(より詳細には、モータ収容部116内)に配置されている。更に、モータ21と本体ハウジング11との間には、弾性体55が配置されている。つまり、モータ21は、ギヤハウジング15と一体的に、本体ハウジング11に対して相対移動可能である。以下、モータ21の配置について説明する。
図2に示すように、モータ21の出力シャフト23の前端部に固定された小ベベルギヤ231は、軸受232によって回転可能に支持されている。軸受232は、カップ状の軸受ホルダ233によって保持されている。軸受ホルダ233は、ギヤハウジング15の後端部に設けられた凹部に嵌め込まれ、圧入固定されている。これにより、モータ21は、ギヤハウジング15と一体化されている。
更に、図1に示すように、モータ21は、後端部に軸受ホルダ551を有する。軸受ホルダ551は、後方へ突出する円形ドーム状の部分であって、出力シャフト23の後端部を回転可能に支持する軸受(図示略)を保持する。一方、本体ハウジング11(モータ収容部116)内には、軸受ホルダ551に後方から対向するように、受け部552が設けられている。受け部552は、軸受ホルダ551に対応する円形ドーム状に形成されている。弾性体55は、軸受ホルダ551の外周と後端とを覆うキャップ状に形成されている。なお、弾性体55はゴム製である。弾性体55は、僅かに圧縮された状態で、軸受ホルダ551と受け部552の間に配置されている。
以上のような構成により、弾性体51~55は、弾性変形によって、ギヤハウジング15およびモータ21が、本体ハウジング11に対して上下方向および前後方向に移動することを許容する。これにより、モータ21および駆動機構3の駆動に伴って生じる振動が、モータ21およびギヤハウジング15から本体ハウジング11へ伝達されることが抑制される。なお、弾性体51~54は、大ベベルギヤ31の周囲の4箇所にバランスよく配置されており、振動の伝達を効果的に抑制することができる。
更に、本実施形態では、レシプロソー101には、本体ハウジング11に対するギヤハウジング15の相対移動量を規定する構造が設けられている。より詳細には、図2に示すように、本体ハウジング11の内部には、ギヤハウジング15に当接することで、本体ハウジング11に対するギヤハウジング15の上下方向および前後方向の相対移動量を規定するストッパ61~64が設けられている。なお、本実施形態では、ストッパ61~64は、夫々、本体ハウジング11の内側に(ギヤハウジング15に向けて)突出するリブの少なくとも一部で構成されている。
図2および図3に示すように、ストッパ61は、本体ハウジング11(駆動機構収容部111)の前端部(つまり、グリップ部115)の内部に、ギヤハウジング15の上前端部(ガイド収容部151の上前端部)に当接可能に配置されている。ギヤハウジング15の上前端部は、上面711と前面712とで規定される断面L字状の段差部71を有する。ストッパ61は、段差部71に対応する断面L字状に形成されており、上面711に対向する下面611と、前面712に対向する後面612とを有する。
初期状態(駆動機構3が駆動していない状態)では、ストッパ61の下面611と後面612は、夫々、段差部71の上面711と前面712から、僅かに離間している。なお、本実施形態では、ストッパ61の下面611と段差部71の上面711との間の隙間よりも、ストッパ61の後面612と段差部71の前面712との間の隙間の方が大きい。
図2および図4に示すように、ストッパ62は、グリップ部115の内部において、ストッパ61の下側に配置されている。なお、ストッパ61とストッパ62とは、上下方向において、駆動軸A1から概ね等距離離間した位置に配置されている。また、ストッパ61とストッパ62とは、前後方向においては、概ね同じ位置に配置されている。ストッパ62は、ギヤハウジング15の前端部(ガイド収容部151の前端部)に当接可能に配置されている。より詳細には、ギヤハウジング15の前端部は、後方に凹む凹部72を有する。ストッパ62は、前後方向に延在するリブの後端部であって、凹部72内に配置されている。
初期状態では、ストッパ62の上面621と下面622と後面623は、夫々、凹部72を規定する上壁面721と下壁面722と後壁面723から僅かに離間している。なお、本実施形態では、ストッパ62の上面621と凹部72の上壁面721との間の隙間、および、下面622と下壁面722との間の隙間の大きさは、何れもストッパ61の下面611と段差部71の上面711との間の隙間と同一である。また、これらの上下方向の隙間よりも、ストッパ62の後面623と凹部72の後壁面723との間の前後方向の隙間の方が大きい。
図2および図5に示すように、ストッパ63は、本体ハウジング11の略中央部(駆動機構収容部111の後端部)の内部に配置されている。ストッパ63は、ギヤハウジング15の後部(ギヤ収容部156の後部)に当接可能に設けられている。ギヤ収容部156の後部は、上面731と後面732とで規定される断面L字状の角部73を有する。ストッパ63は、角部73に対応する断面L字状の角部であって、上面731に対向する下面631と、後面732に対向する前面632とを有する。
初期状態では、ストッパ63の下面631と前面632は、夫々、角部73の上面731と後面732から、僅かに離間している。なお、本実施形態では、ストッパ63の下面631と角部73の上面731との間の隙間の大きさは、ストッパ61の下面611と段差部71の上面711との間の隙間と同一である。また、ストッパ63の下面631と角部73の上面731との間の上下方向の隙間よりも、ストッパ63の前面632と角部73の後面732との間の前後方向の隙間の方が大きい。
図2および図6に示すように、ストッパ64は、本体ハウジング11の略中央部の内部に配置され、本体ハウジング11の内側に突出するリブである。ストッパ64は、ギヤハウジング15の下後端部(ギヤ収容部156の下後端部)に当接可能に設けられている。ギヤハウジング15の下後端部は、下面741と後面742とで規定される断面L字状の角部74を有する。ストッパ64は、角部74に対応する断面L字状の角部であって、下面741に対向する上面641と、後面732に対向する前面642とを有する。
初期状態では、ストッパ64の上面641と前面642は、夫々、角部74の下面741と後面742から、僅かに離間している。なお、本実施形態では、ストッパ64の上面641と角部74の下面741との間の隙間の大きさは、ストッパ61の下面611と段差部71の上面711との間の隙間と同一である。また、本実施形態では、ストッパ64の上面641と角部74の下面741との間の上下方向隙間よりも、ストッパ64の前面642と角部74の後面742との間の前後方向の隙間の方が大きい。
ストッパ61~64とギヤハウジング15との間の隙間は、何れの方向においても、弾性体51~55が弾性変形可能な距離よりも小さく設定されている。よって、ギヤハウジング15が本体ハウジング11に対して移動すると、弾性体51~55が限界まで変形する前に、ストッパ61~64の少なくとも1つが、ギヤハウジング15に当接することになる。これにより、弾性体51~55の耐久性を維持することができる。
なお、図1に示すように、本体ハウジング11のモータ収容部116の内部には、本体ハウジング11の内側に突出する複数のリブ117が設けられている。複数のリブ117は、モータ21の上側および下側に配置されている。各リブ117とモータ21(ケース22)の外表面との間には隙間が設けられているが、これらの隙間の大きさは、上述のストッパ61~64とギヤハウジング15との間の上下方向の隙間と同等かそれ以上に設定されている。
以上のような構成により、ストッパ61は、本体ハウジング11に対するギヤハウジング15の上方への相対移動量および前方への相対移動量を規定する。ストッパ62は、本体ハウジング11に対するギヤハウジング15の上方への相対移動量、下方への相対移動量、および前方への相対移動量を規定する。ストッパ63は、本体ハウジング11に対するギヤハウジング15の上方への相対移動量および後方への相対移動量を規定する。ストッパ64は、本体ハウジング11に対するギヤハウジング15の下方への相対移動量および後方への相対移動量を規定する。
以下、ストッパ61~64の作用について説明する。
上述のように、本実施形態では、本体ハウジング11とギヤハウジング15の間に介在する弾性体51~54と、本体ハウジング11とモータ21の間に介在する弾性体55によって、本体ハウジング11への振動伝達が抑制される。一方で、本体ハウジング11内でギヤハウジング15およびモータ21が移動可能とすると、ハンドル18および/または本体ハウジング11を把持する使用者が、ブレード91に荷重をかけにくくなりやすい。
これに対し、本実施形態では、特に、使用者がグリップ部115を把持し、ブレード91の刃先を被加工材に押し付けるというレシプロソー101に特有の使用者の動作に着目し、グリップ115内部(スライダ35に対応する領域)に、ギヤハウジング15の上方への相対移動量を規定するストッパ61が設けられている。使用者が、グリップ部115を把持して本体ハウジング11に対して上方からある程度の荷重をかけると、ストッパ61(詳細には、下面611)が、ギヤハウジング15の上前端部(詳細には、段差部71の上面711)に当接し、ギヤハウジング15の上方への相対移動を規制するため、刃先を被加工材にしっかりと押付けることができる。このように、本実施形態では、防振性および操作性の両方に優れたレシプロソー101が実現されている。
また、本実施形態では、グリップ部115の内部には、ストッパ61に加え、ストッパ61の下側にギヤハウジング15の下方への相対移動量を規定するストッパ62が設けられている。レシプロソー101では、ブレード91は、通常使用時には、刃先が下向きになるように装着される。しかしながら、作業環境によっては、ブレード91は、刃先が上向きになるように取り付けられる場合がある。この場合、使用者が、グリップ部115を把持して本体ハウジング11に対して下方から荷重をかけると、ストッパ62(詳細には、下面622)が、ギヤハウジング15(詳細には、凹部72の下壁面722)に当接し、ギヤハウジング15の下方への相対移動を規制するため、刃先を被加工材にしっかりと押付けることができる。このように、レシプロソー101は、ブレード91をどちら向きに装着しても、良好な操作性を発揮することができる。
なお、本実施形態では、ストッパ62は、ストッパ61と同様、ギヤハウジング15の上方への相対移動量を規定する機能も有する。より詳細には、ストッパ62(詳細には、上面621)は、ギヤハウジング15の前端部(詳細には、凹部72の上壁面721)に当接し、ギヤハウジング15の上方への相対移動を規制する。このように、本実施形態では、ストッパ61および62が、ギヤハウジング15の前端部の上側と下側で確実にギヤハウジング15の上方への相対移動を規制する構成が採用されている。
更に、本実施形態では、ストッパ61が、ギヤハウジング15の前部の上側に配置されているのに加え、ストッパ64が、ギヤハウジング15の後部の下側に配置されている。このような配置により、使用者がグリップ部115を把持して押し付けたとき、ストッパ61および64は、本体ハウジング11に対するギヤハウジング15およびモータ21の相対的な回動を効果的に規制する。これにより、より安定した操作性を実現することができる。
更に、本実施形態では、ストッパ61および63が、前後方向に離間して配置され、ギヤハウジング15の上方への相対移動量を規定するとともに、ストッパ62および64が、前後方向に離間して配置され、ギヤハウジング15の上方への相対移動量を規定する。このような配置により、ストッパ61~64がギヤハウジング15およびモータ21の相対移動を効果的に規制するため、更に安定した操作性を実現することができる。
また、本実施形態では、弾性体51~55は、本体ハウジング11に対するギヤハウジング15およびモータ21の上下方向および前後方向の移動を許容するように配置されている。レシプロソー101では、ブレード91の往復動の方向(駆動軸A1の延在方向、前後方向)に主たる振動が生じる。また、ブレード91が被加工材へ押し付けられることで、上下方向の振動も生じる。弾性体51~55は、これら2方向の振動がアウタハウジングに伝達されるのを効果的に抑制することができる。なお、弾性体51~55は何れも、単体で上下方向および前後方向に対応可能であることから、弾性体51~55の数を抑制しつつ、効果的な防振構造が実現されている。
本実施形態では、ストッパ61~64は、夫々、上方または下方のみならず、前方または後方へのギヤハウジング15の相対移動にも対応している。よって、使用者が、本体ハウジング11に対して前方へある程度の荷重をかけた場合、ブレード91を前方へ安定して押し付けることが可能となる。更に、ストッパ61~64によって規定されるギヤハウジング15の前方への相対移動量および後方への相対移動量は、夫々、上方および下方への相対移動量よりも大きい。レシプロソー101では、ブレード91の往復動によって生じる前後方向の振動は、上下方向の振動よりも大きい傾向にある。ストッパ61~64によれば、比較的大きな前後方向の振動を逃がしつつ、ブレード91の刃先の押付けには良好に対応することができる。このように、本実施形態では、前後方向および上下方向振動の大きさに応じた適切な防振性と良好な操作性とが実現されている。
第1実施形態の各構成要素と本発明の各構成要素の対応関係を以下に示す。但し、実施形態の各構成要素は単なる一例であって、本発明の各構成要素を限定するものではない。レシプロソー101は、「レシプロソー」の一例である。ブレード91は、「ブレード」の一例である。モータ21は、「モータ」の一例である。駆動機構3は、「駆動機構」の一例である。駆動軸A1は、「駆動軸」の一例である。ギヤハウジング15は、「インナハウジング」の一例である。本体ハウジング11は、「アウタハウジング」の一例である。弾性体51~54の各々は、「弾性体」の一例である。ストッパ61~64の各々は、「当接部」の一例である。グリップ部115は、「グリップ部」の一例である。ストッパ61は、「第1当接部」の一例である。ストッパ62および64の各々は、「第2当接部」の一例である。ストッパ61~64は、夫々、「第1当接部」、「第2当接部」、「第3当接部」、「第4当接部」の一例である。スライダ35は、「スライダ」の一例である。ブレード装着部353は、「ブレード装着部」の一例である。
[第2実施形態]
以下、図7~図12を参照して、第2実施形態に係るレシプロソー102について説明する。なお、以下の説明では、第1実施形態で説明した構成と実質的に同一の構成については、同一の符号を付して、その説明を省略または簡略化する。
まず、レシプロソー102の概略構成について説明する。レシプロソー102は、第1実施形態のレシプロソー101と同様、取り外し可能に装着された薄板状のブレード91を、駆動軸A1に沿って往復動することで、被加工材(例えば、木材)の切断作業を遂行するように構成された手持ち式の電動工具である。
図7に示すように、レシプロソー101の外郭は、主として、本体ハウジング12と、ハンドル19とによって形成されている。
本体ハウジング12は、側面視L字状の中空体であって、モータ26、駆動機構4等を収容する。本体ハウジング12のうち、駆動機構4を収容する駆動機構収容部121は、駆動軸A1に沿って延在する。駆動機構収容部121の前端部からは、ブレード91を着脱可能なブレード装着部453が突出している。なお、本実施形態でも、駆動機構収容部121の前端部は、使用者によって補助的に把持されるグリップ部115を構成している。本体ハウジング12のうち、モータ26を収容するモータ収容部126は、駆動機構収容部121の後端部に接続し、下方に延在する。
ハンドル19は、側面視略C字状に形成された中空体であって、グリップ部191と、上側連結部196と、下側連結部197とを含む。グリップ部191は、使用者によって把持される部分であって、本体ハウジング12の後方で、概ね上下方向に延在する。上側連結部196および下側連結部197は、夫々、グリップ部191の上端部および下端部から前方に延在し、本体ハウジング12の上後端部および下後端部に接続している。下側連結部197の下端部には、バッテリ93を着脱可能なバッテリ装着部187が設けられている。
なお、本実施形態のレシプロソー102は、第1実施形態のレシプロソー101よりも大型であって、使用者は、基本的に、本体ハウジング12ではなく、主にグリップ部191を把持し、更に、必要に応じてグリップ部115を補助的に把持して作業を行う。よって、モータ26の起動用の操作部材は、グリップ部191の上端部に設けられたトリガ192のみである。使用者がトリガ192を押圧操作すると、モータ26が通電されて、駆動機構4によって、ブレード91が駆動軸A1に沿って往復動される。
以下、レシプロソー102の詳細構成について説明する。
まず、本体ハウジング12の内部構造について説明する。
本実施形態では、モータ26には、ブラシレス直流モータが採用されている。図7に示すように、モータ26は、ステータ27と、ステータ27の内側に配置され、出力シャフト29を有するロータ28とを含む。モータ26は、出力シャフト29の回転軸が上下方向(駆動軸A1に直交する方向)に延在するように配置されている。出力シャフト29の上端部には、小ベベルギヤ291が固定されている。小ベベルギヤ291は、駆動機構収容部121内に突出している。
駆動機構4は、モータ26の出力シャフト29の回転運動を直線運動に変換し、ブレード91を往復動させるように構成された運動変換機構であるという点で、第1実施形態の駆動機構3と共通する。本実施形態の駆動機構4の構成も公知であるため、簡単に説明する。図8に示すように、駆動機構4は、大ベベルギヤ41と、偏心ピン43と、連結ロッド44と、スライダ45とを含む。
大ベベルギヤ41は、小ベベルギヤ291に対して左側で、左右方向に延在する回転軸周りに回転可能に支持され、小ベベルギヤ291に噛合している。偏心ピン43は、大ベベルギヤ41の回転軸から偏心した位置に設けられ、大ベベルギヤ41から右方へ突出している。連結ロッド44の一端部は、偏心ピン43に軸受を介して回転可能に連結されている。連結ロッド44の他端部は、連結ピンを介してスライダ45に連結されている。長尺状のスライダ45は、駆動軸A1に沿って、前後方向に延在するように配置されている。スライダ45は、筒状のガイドスリーブ46によって、前後方向に摺動可能に保持されている。スライダ45の前端部は、ブレード装着部453として構成されており、本体ハウジング12から前方へ突出している。
モータ21が駆動されると、小ベベルギヤ291を介して大ベベルギヤ41が回転され、偏心ピン43が、大ベベルギヤ41の回転軸周りを周回する。これに伴い、連結ロッド44を介して偏心ピン43に連結されたスライダ45が、ガイドスリーブ46に案内され、駆動軸A1に沿って前後方向に往復動される。よって、ブレード装着部453に装着されたブレード91も、スライダ45と一体的に、駆動軸A1に沿って前後方向に往復動される。
次に、ハンドル19の内部構造について説明する。
図7に示すように、グリップ部191の内部には、常時にはオフ状態で維持され、トリガ192の押圧操作に応じてオン状態とされるスイッチ193が配置されている。また、下側連結部197の内部(バッテリ装着部187の上側)には、コントローラ198が収容されている。コントローラ198は、制御回路を含み、スイッチ193から入力される信号に基づいて、モータ26の駆動を制御するように構成されている。
なお、本実施形態でも、本体ハウジング12およびハンドル19は、連続的に形成されている。より詳細には、本体ハウジング12およびハンドル19は、合成樹脂製の左右一対の半割体がネジで互いに連結されることで形成されている。
本実施形態でも、レシプロソー102は、モータ26および駆動機構4の駆動に伴って生じる振動が、本体ハウジング12およびハンドル19に伝達されることを抑制するための防振構造を備えている。以下、レシプロソー102の防振構造について説明する。
本実施形態では、上述の駆動機構4は、ギヤハウジング16に収容された状態で、本体ハウジング12内(より詳細には、駆動機構収容部121内)に配置されている。更に、複数の弾性体56~58が、本体ハウジング12とギヤハウジング16との間に介在配置されている。言い換えると、本体ハウジング12とギヤハウジング16とは、相対移動可能に弾性連結されている。以下、ギヤハウジング16の弾性連結構造について説明する。
図8に示すように、ギヤハウジング16は、長尺の中空体である。本実施形態でも、ギヤハウジング16は、金属製の左右一対の半割体が、ネジで互いに連結されることで形成されている。ギヤハウジング16は、駆動機構収容部121内に、駆動軸A1に沿って前後方向に延在するように配置されている。ギヤハウジング16の前半部分は、グリップ部115内に配置されている。ギヤハウジング16の前半部分は、スライダ45を前後方向に摺動案内するガイドスリーブ46を保持する。ギヤハウジング16の後半部分は、大ベベルギヤ41および偏心ピン43、ならびに小ベベルギヤ291を収容する。以下、ギヤハウジング16の前半部分および後半部分を、夫々、ガイド収容部161およびギヤ収容部166という。
本実施形態では、ギヤ収容部166の外周部の3箇所に、弾性体56~58の受け部561、571および581が設けられている。より詳細には、受け部561、571および581は、夫々、ギヤ収容部166の上後端部、下後端部、および下前端部に設けられている。受け部561、571および581の各々は、ギヤ収容部166を左右方向に貫通する断面円形の貫通孔として構成されている。なお、受け部561、571および581は同一の径を有する。
一方、本体ハウジング12の内部には、受け部561、571および581に対応する受け部562、572および582が設けられている。より詳細には、受け部562、572および582は、本体ハウジング12から突出して左右方向に延在する円柱状の突起として構成されており、受け部(貫通孔)561、571および581に挿通されている。なお、受け部562、572および582は、同一の径を有する。
弾性体56~58は、円筒状に形成された同一の部材である。弾性体56は、夫々、僅かに圧縮された状態(荷重がかけられた状態)で、受け部561と受け部562の間に嵌め込まれている。弾性体57は、夫々、僅かに圧縮された状態で、受け部571と受け部572の間に嵌め込まれている。弾性体58は、夫々、僅かに圧縮された状態で、受け部581と受け部582の間に嵌め込まれている。なお、本実施形態では、弾性体56~58はゴム製である。
本実施形態では、図7に示すように、モータ26は、モータハウジング17に収容された状態で、本体ハウジング12内に配置されている。モータハウジング17は、有底筒状に構成されており、ステータ27およびロータ28を収容する。モータ26の出力シャフト29の下端部は、モータハウジング17の下端部中央に保持された軸受292によって回転可能に支持されている。出力シャフト29の上端部は、ギヤハウジング16(ギヤ収容部166)の下端部に保持された軸受293によって回転可能に支持されている。
モータハウジング17の上端部は、ネジ171によって、ギヤハウジング16に固定されている。このような構成により、モータ26は、モータハウジング17と共に、ギヤハウジング16に一体化されている。なお、モータハウジング17は、本体ハウジング12(モータ収容部126)内で、本体ハウジング12の内面には非接触で保持される。
以上のような構成により、弾性体56~58は、弾性変形によって、ギヤハウジング16およびモータハウジング17が、本体ハウジング12に対して、左右方向以外の全方向(弾性体56~58の径方向)に移動することを許容する。これにより、モータ26および駆動機構4の駆動に伴って生じる振動が、モータハウジング17およびギヤハウジング16から本体ハウジング12へ伝達されることが効果的に抑制される。なお、弾性体56~58は、大ベベルギヤ41の周囲の3箇所にバランスよく配置されており、振動の伝達を効果的に抑制することができる。
更に、本実施形態でも、レシプロソー102には、本体ハウジング12に対するギヤハウジング16の相対移動量を規定する構造が設けられている。より詳細には、図8に示すように、本体ハウジング12の内部には、ギヤハウジング16に当接することで、本体ハウジング11に対するギヤハウジング15の上下方向および前後方向の相対移動量を規定するストッパ66~69が設けられている。なお、本実施形態では、ストッパ66~69は、夫々、本体ハウジング12の内側に(ギヤハウジング16に向けて)突出するリブの少なくとも一部で構成されている。
図8および図9に示すように、ストッパ66は、本体ハウジング12(駆動機構収容部121)の前端部(つまり、グリップ部115)の内部に、ギヤハウジング16の上前端部(ガイド収容部161の上前端部)に当接可能に配置されている。より詳細には、ギヤハウジング16の上前端部は、上方に突出する湾曲面761を有する断面半円状の突出部76を有する。ストッパ66は、突出部76に対応する円弧状のリブであって、湾曲面761に対向する湾曲面661を有する。初期状態(駆動機構4が駆動していない状態)では、ストッパ66の湾曲面661は、突出部76の湾曲面761から僅かに離間している。なお、本実施形態では、湾曲面661と湾曲面761との間の隙間は、概ね均一である。
図8および図10に示すように、ストッパ67は、グリップ部115の後端部の内部に、ガイド収容部161の下端部に当接可能に配置されている。より詳細には、ガイド収容部161の下端部は、前面771と下面772とで規定される角部77を有する。ストッパ67は、角部77に対応する断面L字状のリブであって、前面771に対向する後面671と、下面772に対向する上面672とを有する。初期状態では、ストッパ67の後面671と上面672は、夫々、角部77の前面771と下面772から僅かに離間している。なお、本実施形態では、ストッパ67の後面671と角部77の前面771との間の隙間、および、上面672と下面772との間の隙間は略同一である。
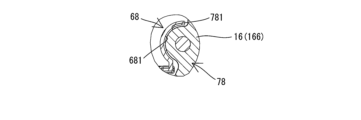
図8および図11に示すように、ストッパ68は、本体ハウジング12の上後端部(駆動機構収容部121の上後端部)の内部に、ギヤハウジング16の上後端部(ギヤ収容部166の上後端部)に当接可能に設けられている。より詳細には、ギヤ収容部166の上後端部は、後方に突出する湾曲面781を有する断面半円状の突出部78を有する。ストッパ68は、突出部78に対応する円弧状のリブであって、湾曲面781に対向する湾曲面681を有する。初期状態では、ストッパ68の湾曲面681は、突出部78の湾曲面781から僅かに離間している。なお、本実施形態では、湾曲面681と湾曲面781との間の隙間は、概ね均一である。
図8および図12に示すように、ストッパ69は、本体ハウジング12の下後端部(駆動機構収容部121の下後端部)の内部に、ギヤハウジング16の下後端部(ギヤ収容部166の下後端部)に当接可能に設けられている。より詳細には、ギヤ収容部166の下後端部は、後方に突出する湾曲面791を有する断面半円状の突出部79を有する。ストッパ69は、突出部79に対応する円弧状のリブであって、湾曲面791に対向する湾曲面691を有する。初期状態では、ストッパ69の湾曲面691は、突出部79の湾曲面791から僅かに離間している。なお、本実施形態では、湾曲面691と湾曲面791との間の隙間は、概ね均一である。
ストッパ66~69とギヤハウジング16との間の隙間は、何れの方向においても、弾性体56~58が弾性変形可能な長さよりも小さく設定されている。よって、ギヤハウジング16が本体ハウジング12に対して移動すると、弾性体56~58が限界まで変形する前に、ストッパ66~69の少なくとも1つが、ギヤハウジング16に当接することになる。なお、上述のように、モータハウジング17は、本体ハウジング12に対してギヤハウジング16と一体的に移動可能であるが、本体ハウジング12に当接することはない。
以上のような構成により、ストッパ66は、本体ハウジング12に対するギヤハウジング16の上方への相対移動量、ならびに前方および後方への相対移動量を規定する。ストッパ67は、本体ハウジング12に対するギヤハウジング16の下方への相対移動量、および前方への相対移動量を規定する。ストッパ68は、本体ハウジング12に対するギヤハウジング16の上方および下方への相対移動量、ならびに後方への相対移動量を規定する。ストッパ69は、本体ハウジング12に対するギヤハウジング16の下方への相対移動量および後方への相対移動量を規定する。
以下、ストッパ66~69の作用について説明する。なお、ストッパ66~69の作用は、基本的には第1実施形態のストッパ61~64と同じであるため、以下では簡単に説明する。
本実施形態でも、グリップ115内部(スライダ45に対応する領域)には、ギヤハウジング16の上方への相対移動量を規定するストッパ66が設けられている。これにより、本実施形態でも、防振性および操作性の両方に優れたレシプロソー102が実現されている。また、グリップ部115の内部には、ストッパ66に加え、ギヤハウジング16の下方への相対移動量を規定するストッパ67が設けられている。これにより、レシプロソー102は、ブレード91をどちら向きに装着しても、良好な操作性を発揮することができる。
更に、本実施形態でも、ストッパ66が、ギヤハウジング16の前部の上側に配置されているのに加え、ストッパ69が、後部の下側に配置されている。このような配置により、ストッパ66および69は、本体ハウジング12に対するギヤハウジング16およびモータハウジング17の相対的な回動を効果的に規制するため、より安定した操作性を実現することができる。更に、ギヤハウジング16の周囲に離間して配置された4つのストッパ66~69が、ギヤハウジング16およびモータハウジング17の相対移動を効果的に規制するため、更に安定した操作性を実現することができる。
第2実施形態の各構成要素と本発明の各構成要素の対応関係を以下に示す。但し、実施形態の各構成要素は単なる一例であって、本発明の各構成要素を限定するものではない。レシプロソー102は、「レシプロソー」の一例である。モータ26は、「モータ」の一例である。駆動機構4は、「駆動機構」の一例である。駆動軸A1は、「駆動軸」の一例である。ギヤハウジング16およびモータハウジング17は、「インナハウジング」の一例である。本体ハウジング12は、「アウタハウジング」の一例である。弾性体56~58の各々は、「弾性体」の一例である。ストッパ66~69の各々は、「当接部」の一例である。グリップ部115は、「グリップ部」の一例である。ストッパ66は、「第1当接部」の一例である。ストッパ67および69の各々は、「第2当接部」の一例である。ストッパ66~69は、夫々、「第1当接部」、「第2当接部」、「第3当接部」、「第4当接部」の一例である。スライダ45は、「スライダ」の一例である。ブレード装着部453は、「ブレード装着部」の一例である。
なお、上記実施形態は単なる例示であり、本発明に係るレシプロソーは、例示されたレシプロソー101および102の構成に限定されるものではない。例えば、下記に例示される変更を加えることができる。なお、これらの変更は、これらのうちいずれか1つのみ、あるいは複数が、実施形態に示すレシプロソー101または102、あるいは各請求項に記載された発明と組み合わされて採用されうる。
例えば、レシプロソー101、102は、バッテリ93ではなく、電源ケーブルを介して外部の交流電源から供給される電力によって動作してもよい。モータ21、26には、直流モータではなく、交流モータが採用されてもよい。
ブレード91を駆動軸A1に沿って往復動させる機構は、駆動機構3および4に限られない。モータの出力シャフトの回転運動を直線状の往復動に変換してブレード91に伝達可能であれば、いかなる公知の機構が採用されてもよい。例えば、運動変換には、回転体の回転に伴って揺動する揺動部材(いわゆるスワッシュベアリング)が採用されてもよい。各種シャフトやギヤの組み合わせおよび配置も、適宜変更されうる。また、ブレード91を駆動軸A1に沿って往復動させる機構は、必ずしもブレード91を駆動軸A1上または駆動軸A1に平行な軸上で直線状に往復動させる必要はない。例えば、駆動軸A1上または駆動軸A1に平行な軸上の往復動と、揺動運動との複合動作によって、ブレード91を楕円軌道上で往復動させる機構(いわゆるオービタル機構)であってもよい。更に、レシプロソー101、102は、スライダ35、45と逆位相で動作するカウンタウェイトを備えてもよい。
本体ハウジング11、12、およびハンドル18、19の形状、構成部材、本体ハウジング11、12とハンドル18、19との連結態様等は、適宜変更可能である。また、ギヤハウジング15、16の形状、構成部材、モータ21、26の保持態様等についても、適宜変更可能である。例えば、レシプロソー101(図1参照)においても、モータ21は、ギヤハウジング15に固定された(一体化された)モータハウジングに収容されていてもよい。レシプロソー102(図7参照)において、モータ26は、出力シャフト29の回転軸が駆動軸A1に対して斜めに延在するように配置されてもよい。
本体ハウジング11、12と、ギヤハウジング15、16の間に介在する弾性体51~54、56~58、および本体ハウジング11とモータ21との間に介在する弾性体55の数、配置位置、形状、材質等は、適宜変更されてよい。例えば、ゴム製の弾性体51~58に代えて、例えば、各種バネ、弾性を有する合成樹脂(例えば、ウレタン発泡体)、またはフェルト等で形成された弾性体が採用されてもよい。また、本体ハウジング11、12に対するギヤハウジング15、16の上下方向の移動を許容する少なくとも1つの第1の弾性体と、前後方向の移動を許容する少なくとも1つの第2の弾性体とが設けられてもよい。
同様に、ギヤハウジング15、16に当接することで、本体ハウジング11、12に対するギヤハウジング15、16の相対移動量を規定するストッパ61~64、66~69の数、配置位置、形状、材質等は、適宜変更されてよい。更に、ストッパ61~64、66~69と、ギヤハウジング15、16との間の隙間の大きさも、変更されうる。
例えば、レシプロソー101には、ストッパ61のみが設けられてもよいし、ストッパ61および62のみが設けられてもよいし、ストッパ61および64のみが設けられてもよい。ストッパ61は、グリップ部115の内部において、より後方の位置に配置されてもよい。また、ストッパ61~64は、必ずしもギヤハウジング15の2方向の相対移動を規制する必要はなく、1方向のみに対応してもよい。例えば、ストッパ61および63は、ギヤハウジング15の上方向の相対移動のみを規制し、ストッパ62および64は、ギヤハウジング15の下方向の相対移動のみを規制してもよい。つまり、ギヤハウジング15の前後方向の相対移動量は規定されなくてもよい。また、レシプロソー102のストッパ66~69についても同様の変更が可能である。
更に、本発明および上記実施形態の趣旨に鑑み、以下の態様が構築される。以下の態様のうち少なくとも1つが、上述の実施形態とその変形例、および各請求項に記載された発明の1つまたは複数と組み合わされて採用されうる。
[態様1]
前記第1当接部は、前記駆動軸に対して上側に配置されている。
[態様2]
前記第2当接部は、前記駆動軸に対して下側に配置されている。
[態様3]
前記モータは、前記インナハウジングに固定されており、前記アウタハウジングに対して前記インナハウジングと一体的に移動可能である。
[態様4]
態様3において、
前記アウタハウジングと前記モータの間に介在する弾性体を更に備える。
[態様5]
前記インナハウジングは、前記駆動機構を収容する第1部分と、前記モータを収容する第2部分とを含む。
ギヤハウジング16およびモータハウジング17は、夫々、本態様の「第1部分」および「第2部分」の一例である。
[態様6]
前記駆動機構は、前記モータの出力シャフトに固定された小ベベルギヤと、
前記小ベベルギヤに噛合して第1回転軸周りに回転するように構成され、前記第1回転軸に対して偏心した位置にある偏心シャフトを有する大ベベルギヤと、
前記偏心シャフトに直接的または間接的に連結され、前記大ベベルギヤの回転に伴って、前記駆動軸に沿って前記前後方向に往復動するように構成されたスライダを含み、
前記少なくとも1つの弾性体は、前記大ベベルギヤの周囲に互いから離間して配置された複数の弾性体を含む。
小ベベルギヤ231および291は、夫々、本態様の「小ベベルギヤ」の一例である。大ベベルギヤ31および41は、夫々、本態様の「大ベベルギヤ」の一例である。偏心ピン33および43は、夫々、本態様の「偏心シャフト」の一例である。スライダ35および45は、夫々、本態様の「スライダ」の一例である。