1.実施形態
以下、本発明の一実施形態に係る内燃機関の制御装置について説明する。なお、各図において共通の部材には、同一の符号を付している。
[内燃機関システム]
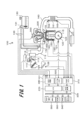
まず、本実施形態によるバルブタイミング制御装置を搭載する内燃機関システムの構成について説明する。図1は、本発明の一実施形態に係る内燃機関の基本構成例を示す全体構成図である。
図1に示す内燃機関100は、単気筒でも複数気筒を有するものでもよいが、実施形態では、4気筒を有する内燃機関100を例示して説明する。図1に示すように、内燃機関100では、外部から吸引した空気はエアクリーナ110、吸気管111、吸気マニホールド112を通流し、各気筒150に流入する。各気筒150に流入する空気量は、スロットル弁113により調整される。スロットル弁113で調整された空気量は、流量センサ114により測定される。
スロットル弁113には、スロットルの開度を検出するスロットル開度センサ113aが設けられている。スロットル開度センサ113aで検出されたスロットル弁113の開度情報は、制御装置(Electronic Control Unit:ECU)101に出力される。
本実施形態では、スロットル弁113として、電動機で駆動される電子スロットル弁を適用する。しかし、本発明に係るスロットル弁としては、空気の流量を適切に調整できるものであれば、その他の方式によるものを適用してもよい。
各気筒150に流入したガスの温度は、吸気温センサ115で検出される。
クランクシャフト123に取り付けられたリングギア120の径方向外側には、クランク角センサ121が設けられている。クランク角センサ121は、クランクシャフト123の回転角度を検出する。本実施形態では、クランク角センサ121は、10°毎及び燃焼周期毎のクランクシャフト123の回転角度を検出する。
シリンダヘッドのウォータジャケット(図示せず)には、水温センサ122が設けられている。水温センサ122は、内燃機関100の冷却水の温度を検出する。
また、車両には、アクセルペダル125の変位量(踏み込み量)を検出するアクセルポジションセンサ(Accelerator Position Sensor:APS)126が設けられている。アクセルポジションセンサ126は、運転者の要求トルクを検出する。アクセルポジションセンサ126で検出された運転者の要求トルクは、後述する制御装置101に出力される。制御装置101は、この要求トルクに基づいて、スロットル弁113を制御する。
燃料タンク130に貯留された燃料は、燃料ポンプ131によって吸引及び加圧される。燃料ポンプ131によって吸引及び加圧された燃料は、燃料配管133に設けられたプレッシャレギュレータ132で所定の圧力に調整される。そして、所定の圧力に調整された燃料は、燃料噴射装置(インジェクタ)400から各気筒150内に噴射される。
燃料噴射装置400の制御は、後述する制御装置101の燃料噴射制御部382の燃料噴射パルス(制御信号)に基づいて行われる。
プレッシャレギュレータ132で圧力調整された後の余分な燃料は、戻り配管(図示せず)を介して燃料タンク130に戻される。
各気筒150には、燃焼後のガス(排気ガス)を、気筒150の外側に排出する排気マニホールド160が取り付けられている。この排気マニホールド160の排気側には、三元触媒161が設けられている。三元触媒161は、排気ガスを浄化する。三元触媒161により浄化された排気ガスは、大気に排出される。
三元触媒161の上流側には、上流側空燃比センサ162が設けられている。上流側空燃比センサ162は、各気筒150から排出された排気ガスの空燃比を連続的に検出する。
また、三元触媒161の下流側には、下流側空燃比センサ163が設けられている。下流側空燃比センサ163は、理論空燃比近傍でスイッチ的な検出信号を出力する。本実施形態の下流側空燃比センサ163は、O2センサである。
各気筒150の上部には、点火プラグ200が各々設けられている。点火プラグ200は、放電(点火)により火花を発生させ、その火花が、気筒150内の空気と燃料との混合気に着火する。これにより、気筒150内で爆発が起こり、ピストン170が押し下げられる。ピストン170が押し下げられることにより、クランクシャフト123が回転する。
前述したスロットル開度センサ113a、流量センサ114、クランク角センサ121、アクセルポジションセンサ126、水温センサ122、筒内圧センサ140等の各種センサからの出力信号は、制御装置101に出力される。制御装置101は、これら各種センサからの出力信号に基づいて、内燃機関100の運転状態を検出する。そして、制御装置101は、気筒150内に送出する空気量、燃料噴射装置400からの燃料噴射量、点火プラグ200の点火タイミング等の制御を行う。
[制御装置のハードウェア構成]
次に、制御装置101のハードウェアの全体構成を説明する。
図1に示すように、制御装置101は、アナログ入力部310と、デジタル入力部320と、A/D(Analog/Digita)変換部330と、RAM(Random Access Memory)340と、MPU(Micro-Processing Unit)350と、ROM(Read Only Memory)360と、I/O(Input/Output)ポート370と、出力回路380と、を有する。
アナログ入力部310には、スロットル開度センサ113a、流量センサ114、アクセルポジションセンサ126、上流側空燃比センサ162、下流側空燃比センサ163、筒内圧センサ140、水温センサ122等の各種センサからのアナログ出力信号が入力される。
アナログ入力部310には、A/D変換部330が接続されている。アナログ入力部310に入力された各種センサからのアナログ出力信号は、ノイズ除去等の信号処理が行われた後、A/D変換部330でデジタル信号に変換される。そして、A/D変換部330により変換されたデジタル信号は、RAM340に記憶される。
デジタル入力部320には、クランク角センサ121からのデジタル出力信号が入力される。
デジタル入力部320には、I/Oポート370が接続されている。デジタル入力部320に入力されたデジタル出力信号は、I/Oポート370を介してRAM340に記憶される。
RAM340に記憶された各出力信号は、MPU350で演算処理される。
MPU350は、ROM360に記憶された制御プログラム(図示せず)を実行することで、RAM340に記憶された出力信号を、制御プログラムに従って演算処理する。MPU350は、制御プログラムに従って、内燃機関100を駆動する各アクチュエータ(例えば、スロットル弁113、プレッシャレギュレータ132、点火プラグ200等)の作動量を規定する制御値を算出し、その制御値をRAM340に一時的に記憶する。
RAM340に記憶されたアクチュエータの作動量を規定する制御値は、I/Oポート370を介して出力回路380に出力される。
出力回路380には、各種センサ(例えば、筒内圧センサ140)からの出力信号に基づいて内燃機関の全体制御を行う全体制御部381(図2参照)と、燃料噴射装置400のプランジャロッド(不図示)の駆動を制御する燃料噴射制御部382(図2参照)と、点火プラグ200に印加する電圧を制御する点火制御部383(図3参照)の機能などが設けられている。
[制御装置の機能ブロック]
次に、制御装置101の機能構成を説明する。
図2は、制御装置101の機能構成を説明する機能ブロック図である。
制御装置101の各機能は、MPU350がROM360記憶された制御プログラムを実行することにより、出力回路380における各種機能として実現される。出力回路380における各種機能は、例えば、燃料噴射制御部382による燃料噴射装置400の制御や、点火制御部383による点火プラグ200の放電制御がある。
図4に示すように、制御装置101の出力回路380は、全体制御部381と、燃料噴射制御部382と、点火制御部383と、バルブタイミング制御部390とを有する。
[全体制御部]
全体制御部381は、アクセルポジションセンサ126と、筒内圧センサ140(CPS)に接続されており、アクセルポジションセンサ126からの要求トルク(加速信号S1)と、筒内圧センサ140からの出力信号S2とを受け付ける。全体制御部381は、筒内圧センサ140からの出力信号S2の所定の補正期間に応じて補正を行う。
全体制御部381は、アクセルポジションセンサ126からの要求トルク(加速信号S1)と、筒内圧センサ140からの出力信号S2とに基づいて、燃料噴射制御部382と、点火制御部383と、バルブタイミング制御部390の全体的な制御を行う。
[点火制御部]
点火制御部383は、全体制御部381のほか、気筒判別部384と、角度情報生成部385と、回転数情報生成部386と、負荷情報生成部388と、水温計測部389とに接続されており、これらからの各情報を受け付ける。
点火制御部383は、受け付けた各情報に基づいて、点火コイル300の1次側コイルに通電する電流量(通電角)と、通電開始時間と、1次側コイルに通電した電流を遮断する時間(点火時間)を算出する。
点火制御部383は、算出した通電量と、通電開始時間と、点火時間とに基づいて、点火コイル300の1次側コイルに点火信号SAを出力することで、点火プラグ200による放電制御を行う。
[燃料噴射制御部]
燃料噴射制御部382は、内燃機関100の各気筒150を判別する気筒判別部384と、クランクシャフト123のクランク角を計測する角度情報生成部385と、エンジン回転数を計測する回転数情報生成部386と、に接続されている。燃料噴射制御部382は、気筒判別部384からの気筒判別情報S3と、角度情報生成部385からのクランク角度情報S4と、回転数情報生成部386からのエンジン回転数情報S5と、を受け付ける。
また、燃料噴射制御部382は、気筒150内に吸気される空気の吸気量を計測する吸気量計測部387と、エンジン負荷を計測する負荷情報生成部388と、エンジン冷却水の温度を計測する水温計測部389と、に接続されている。燃料噴射制御部382は、吸気量計測部387からの吸気量情報S6と、負荷情報生成部388からのエンジン負荷情報S7と、水温計測部389からの冷却水温度情報S8と、を受け付ける。
燃料噴射制御部382は、受け付けた各情報に基づいて、燃料噴射装置400から噴射される燃料の噴射量と噴射時間を算出する。そして、燃料噴射制御部382は、算出した燃料の噴射量と噴射時間とに基づいて生成した燃料噴射パルスS9を燃料噴射装置400に送信する。
[バルブタイミング制御部]
バルブタイミング制御部390は、内燃機関100の各気筒150を判別する気筒判別部384と、クランクシャフト123のクランク角を計測する角度情報生成部385と、エンジン回転数を計測する回転数情報生成部386と、に接続されている。バルブタイミング制御部390は、気筒判別部384からの気筒判別情報S3と、角度情報生成部385からのクランク角度情報S4と、回転数情報生成部386からのエンジン回転数情報S5と、を受け付ける。
また、バルブタイミング制御部390は、気筒150内に吸気される空気の吸気量を計測する吸気量計測部387と、エンジン負荷を計測する負荷情報生成部388と、エンジン冷却水の温度を計測する水温計測部389と、に接続されている。バルブタイミング制御部390は、吸気量計測部387からの吸気量情報S6と、負荷情報生成部388からのエンジン負荷情報S7と、水温計測部389からの冷却水温度情報S8と、を受け付ける。
バルブタイミング制御部390は、受け付けた各情報に基づいて、後述する吸気カムシャフト2の作動角を遅角にするタイミング(遅角タイミング)と進角にするタイミング(進角タイミング)を決定する。そして、燃料噴射制御部382は、決定した遅角タイミングや進角タイミングに基づいて生成したモータ駆動電流(制御電流)S10を後述するバルブタイミング制御装置500の電動モータ12(図5参照)に供給する。
[内燃機関の要部構成]
次に、本実施形態に係る制御装置101を適用した内燃機関100(車両用筒内噴射式4気筒ガソリンエンジン)の要部構成を説明する。
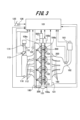
図3は、制御装置101を適用した内燃機関100(車両用筒内噴射式4気筒ガソリンエンジン)の要部構成を説明する模式図である。
図4は、各気筒150の配列を説明する平面図である。
図3に示すように、本実施形態の内燃機関100は、火花点火式燃焼を実施する車両用の直列4気筒ガソリンエンジンである場合を例示して説明する。
内燃機関100では、第1気筒151、第2気筒152、第3気筒153、第4気筒154が、シリンダブロック(図示せず)に直列に設けられている。以下、これら第1気筒151~第4気筒154を特に区別しない場合、単に気筒150と言う。
各気筒150の燃焼室150a内には、点火プラグ200と、筒内圧センサ140と、燃料噴射装置400とが取り付けられている(図4参照)。内燃機関100が、直列4気筒の場合、各気筒150の燃焼室150aでは、クランクシャフト123の回転角度が180度周期で、点火プラグ200による点火と燃焼が行われる。各気筒150における燃焼は、第1気筒151、第3気筒153、第4気筒154、第2気筒152の順番で行われる。
各気筒150に流入する空気の圧力は、吸気マニホールド112に設けられた吸気圧センサ116により測定される。
各気筒150の上方には、シリンダヘッド180が設けられている。シリンダヘッド180には、吸気カムシャフト2と、排気カムシャフト105とが設けられている。吸気カムシャフト2は、気筒150内への混合気(空気と燃料との混合気)の吸入量を調整する吸気弁106aを稼働させる。排気カムシャフト105は、気筒150内から排出する排気ガスの排出量を調整する排気弁106bを稼働させる。
図3に示すように、吸気カムシャフト2には、バルブタイミング制御装置500が接続されている。また、バルブタイミング制御装置500は、制御装置101と電気的に接続されている。
図4に示すように、内燃機関100では、第1気筒151~第4気筒154に、筒内圧センサ140A~140Dと、対応する燃料噴射装置400A~400Dとが設けられている。筒内圧センサ140A~140Dと、対応する燃料噴射装置400A~400Dとは、それぞれ近距離に配置されている。
以下、筒内圧センサ140A~140Dを特に区別しない場合、単に筒内圧センサ140と表記する。また、燃料噴射装置400A~400Dを特に区別しない場合、単に燃料噴射装置400と表記する。
内燃機関100では、燃料噴射装置400A~400Dのプランジャロッドの駆動に伴う振動や歪がシリンダヘッド180などの内燃機関100の構成部品を伝播して筒内圧センサ140A~140Dに伝達される恐れがある。この場合、筒内圧センサ140A~140Dは、プランジャロッド410の振動や歪の影響を受け、筒内圧センサ140A~140Dによる振動の検出誤差が大きくなってしまう。
さらに、内燃機関100では、筒内圧センサ140A~140Dの信号線140a~140d(図6の実線)と、燃料噴射装置400A~400Dの電力線400a~400d(図6の破線)と、が共に制御装置101に接続されている。このため、電力線400a~400dの電流変化により電磁誘導が発生し、筒内圧センサ140A~140Dの信号線140a~140dの出力信号S2に影響を与える。よって、この電力線400a~400dの電磁誘導もまた、筒内圧センサ140A~140Dによる振動の検出誤差の要因となる。
[バルブタイミング制御装置]
次に、バルブタイミング制御装置500の構成について説明する。本実施形態では、バルブタイミング制御装置500を吸気側に適用したものを示している。すなわち、バルブタイミング制御装置500は、クランクシャフト123の回転と吸気カムシャフト2の回転の相対回転位相を変更して、吸気カムシャフト2により開閉される吸気弁106aのリフト量を可変する。しかし、本発明に係るバルブタイミング制御装置としては、排気側に適用することも可能である。
図5は、本実施形態に係るバルブタイミング制御装置を示す一部縦断面図である。図6は、本実施形態に供される主要な構成部材を示す分解図である。図7は、図5に示すバルブタイミング制御装置の要部拡大図である。図8は、図5に示すA-A線断面図である。
図1及び図2に示すように、バルブタイミング制御装置500は、駆動回転体であるタイミングスプロケット1(以下、スプロケット1という。)と、吸気カムシャフト2(以下、カムシャフト2という。)と、スプロケット1とカムシャフト2との間に配置された位相変更機構3と、を備えている。カムシャフト2は、シリンダヘッド180上に軸受181を介して回転自在に支持されている。位相変更機構3は、内燃機関100の運転状態に応じて両者1,2の相対回転位相を変更する。
スプロケット1は、全体が金属材である鉄系金属によって環状一体に形成されている。スプロケット1は、円環状のスプロケット本体1aと、該スプロケット本体1aの外周に一体に設けられた歯車部1bとを備えている。歯車部1bには、不図示のタイミングチェーンが巻回されている。歯車部1bは、タイミングチェーンを介して、内燃機関100のクランクシャフト123(図1参照)からの回転力を受ける。
なお、スプロケット1の外周には、内燃機関100のシリンダブロック(不図示)とシリンダヘッド180に結合された不図示のチェーンケースが設けられている。
スプロケット本体1aの前端側には、後述する減速機構13の一部を構成する円環状の内歯構成部5が一体に設けられている。この内歯構成部5は、スプロケット本体1aに回転軸方向から一体に結合されている。内歯構成部5の内周には、波形状の複数の内歯5aが形成されている。
スプロケット本体1aの内周面と従動回転体である後述する従動部材9の外周面との間には、滑り軸受機構6が設けられている。従動部材9は、カムシャフト2の回転軸方向の一端部2aに固定されている。滑り軸受機構6は、従動部材9(カムシャフト2)の外周でスプロケット1を相対回転自在に軸受けしている。
さらに、スプロケット本体1aの内歯構成部5と反対側の後端面には、保持プレート8が固定されている。この保持プレート8は、図5、図6及び図8に示すように、金属材である鉄系金属の板材によって円環状に形成されている。保持プレート8の外径は、スプロケット本体1aの外径とほぼ同一に設定されている。また、保持プレート8は、中央に形成された中央孔8a側の内周部8bが滑り軸受機構6の後述する軸受凹部10のカムシャフト2側の一端開口を覆うように配置されている。この内周部8bは、中央孔8aの孔縁となる部位が、内歯構成部5の内歯5aの歯底面よりも内側に位置している。
また、保持プレート8は、中央孔8aの内周縁の所定位置に、径方向内側、つまり中心軸方向に向かって突出したストッパ凸部8cが一体に設けられている。このストッパ凸部8cは、ほぼ逆台形状に形成されて、先端面が従動部材9の後述する固定端部9bのストッパ凹溝9fの円弧状内周面に沿った円弧状に形成されている。
図9は、図5に示すB矢視図である。
また、スプロケット1の内歯構成部5側の前端面には、フロントプレート15が設けられている。このフロントプレート15は、図5、図6及び図9に示すように、例えば鉄系金属板を円環状にプレス成形で打ち抜き形成されたものである。フロントプレート15の肉厚tは、保持プレート8の肉厚t1よりも小さく設定されている。フロントプレート15は、中央に挿入孔15aが貫通形成されている。フロントプレート15の挿入孔15aには、後述する偏心軸21が挿入される。
内歯構成部5を含むスプロケット本体1aとフロントプレート15の各外周部には、6つのボルト挿通孔1c、15bが周方向のほぼ等間隔位置にそれぞれ貫通形成されている。各ボルト挿通孔1c、15bには、ボルト7が挿通する。また、保持プレート8における各ボルト挿通孔1c、15bに対応する位置には、6つの雌ねじ孔8dが形成されている。6つの雌ねじ孔8dには、各ボルト7の先端部に設けられた雄ねじ部7aが螺着する。
図6に示すように、スプロケット本体1aの2つのボルト挿通孔1cと保持プレート8の対応する2つの雌ねじ孔8dの各側部には、位置決め用の小孔1d、8eがそれぞれ設けられている。位置決め用の小孔1d、8eには、2つの位置決め用のピン28a、28bが挿入される。これにより、保持プレート8は、スプロケット1に対して周方向及び軸方向で位置決めされる。
カムシャフト2は、外周に吸気弁106a(図3参照)を開作動させる一気筒当たり2つの駆動カムを有している。また、カムシャフト2において、回転軸方向の位相変更機構3側の一端部2aには、フランジ部2bが一体に設けられている。フランジ部2bは、軸受181を介してカムシャフト2の軸方向の位置決めを行う。また、カムシャフト2の一端部2aにおける内部軸心方向には、雌ねじ部2cが形成されている。雌ねじ部2cには、後述のカムボルト14が螺着する。カムボルト14は、カムシャフト2に従動部材9を軸方向から締結固定する。さらに、カムシャフト2の一端部2aの前端には、従動部材9との回転方向の位置決めを行う位置決め用のピン2dが圧入固定されている。
従動部材9は、鉄系金属によって一体に形成されている。図5、図6及び図8に示すように、従動部材9は、円盤状本体9aと、該円盤状本体9aの後端側(カムシャフト2側)に有する円環状の固定端部9bと、から主として構成されている。
円盤状本体9aは、外周面に滑り軸受機構6の一部を構成するジャーナル部11が一体に設けられている。また、円盤状本体9aは、固定端部9bを含む内部軸心方向にカムボルト14の軸部14bが挿通するボルト挿通孔9cが貫通形成されている。このボルト挿通孔9cは、内径がカムシャフト2の雌ねじ部2cの内径よりも大きく形成されている。
固定端部9bは、一定の肉厚を有しており、円盤状本体9aからカムシャフト2方向へ突出している。また、固定端部9bにおけるカムシャフト2側の外側面のほぼ中央(ボルト挿通孔9cの外周側)には、円環状の嵌合溝9dが形成されている。固定端部9bの嵌合溝9dには、カムシャフト2の一端部2aにおける先端部が嵌合する。嵌合溝9dの底面には、位置決め用の孔9eが形成されている。位置決め用の孔9eには、前述したカムシャフト2の位置決め用のピン2dが軸方向から挿入される。
また、固定端部9bの外周面には、ストッパ凹溝9fが円周方向に沿って形成されている。ストッパ凹溝9fは、円周方向へ延びる所定長さの円弧状に形成されている。ストッパ凹溝9fには、保持プレート8のストッパ凸部8cが入り込む。ストッパ凸部8cは、ストッパ凹溝9fの範囲内で円周方向へ回動する。ストッパ凸部8cの2つの側面が、ストッパ凹溝9fの対向面にそれぞれ当接することにより、ストッパ凸部8cの回動が規制される。このように、本実施形態では、スプロケット1に対するカムシャフト2の最大進角側、あるいは最大遅角側の相対回転位置を機械的に規制するようになっている。
従動部材9は、嵌合溝9dにカムシャフト2の一端部2aの先端部が軸方向から嵌合した状態で、カムボルト14によってカムシャフト2の一端部2aに軸方向から固定される。
滑り軸受機構6は、図5及び図6に示すように、スプロケット本体1aの内周面に形成された円環状の軸受凹部10と、円盤状本体9aの外周面に設けられ、軸受凹部10の内部に配置されたジャーナル部11と、軸受凹部10の一端開口を覆う保持プレート8と、を有している。
軸受凹部10は、スプロケット本体1aの保持プレート8側の一方側面から内歯構成部5まで延びることなく、カムシャフト2側に寄ったスプロケット本体1aの内周面側のみに配置形成されている。また、軸受凹部10は、図5に示すように、スプロケット1の回転軸心から径方向に沿った断面形状がほぼ矩形状に形成されている。そして、軸受凹部10は、その一部が各歯車部1bの形成位置と軸方向でオーバーラップするように配置されている。
さらに、軸受凹部10の円環状の底面には、滑り軸受面10aが形成されている。また、軸受凹部10は、軸方向で保持プレート8と反対側の他端側に有する内側面10bが滑り軸受面10aから径方向へほぼ直角に切欠されている。また、軸受凹部10は、前述したように、カムシャフト2側の他端部が開口されて外部に解放され、この解放された他端開口が保持プレート8の内周部8bの内側面8fによって覆われている。
ジャーナル部11は、円盤状本体9aの外周面から径方向外側へ突出している。ジャーナル部11の断面形状は、軸受凹部10の断面形状とほぼ相似形の矩形状に形成されている。また、ジャーナル部11は、軸受凹部10が各歯車部1bと軸方向でオーバーラップしていることから、同じく一部がスプロケット1の各歯車部1bと軸方向でオーバーラップ配置されている。
さらに、ジャーナル部11の基部11aにおける軸方向両側には、それぞれ円環溝が形成されている。また、ジャーナル部11の環状の外周面は、軸受凹部10の滑り軸受面10a全体に摺動可能になっている。各円環溝は、従動部材9の回転時においてジャーナル部が、保持プレート8の内側面8fと軸受凹部10の内側面10bと接触するのを回避するようになっている。
ジャーナル部11は、軸方向のフロントプレート15側の一端面が軸受凹部10の内側面10bに摺動可能になっている。この軸受凹部10の内側面10bが、スプロケット1の傾動時においてジャーナル部11の一端面に当接して一方のスラスト移動を規制するようになっている。
また、ジャーナル部11は、軸方向の保持プレート8側の他端面が保持プレート8の内周部8bの内側面8fに摺動可能になっている。この保持プレート8の内側面8fが、スプロケット1の傾動時においてジャーナル部11の他端面に当接して他方のスラスト移動を規制するようになっている。
カムボルト14は、図5及び図7に示すように、ほぼ円柱状の頭部14aと、該頭部14aに一体に固定された軸部14bと、を有している。
頭部14aの先端部には、六角レンチなどの工具が挿入される六角形の工具穴14cが形成されている。また、頭部14aの外周面には、ニードルベアリング25の各ニードルローラ25aが転動可能に保持されている。
軸部14bは、頭部14aとの結合部に一体に設けられた大径部14dを有する。また、大径部14dよりも先端部側の小径部の外周には、カムシャフト2の雌ねじ部2cに螺着する雄ねじ部14eが形成されている。
大径部14dは、従動部材9のボルト挿通孔9cに挿入される。大径部14dの軸方向の長さは、ボルト挿通孔9cの軸方向の長さとほぼ同一に設定されている。また、大径部14dは、外径がボルト挿通孔9cの内径より僅かに小さく設定されている。これにより、大径部14dは、ボルト挿通孔9cに微小クリアランスをもって挿入される。
位相変更機構3は、図5及び図6示すように、従動部材9の固定端部9bにおける前端側に配置された電動モータ12と、この電動モータ12の回転速度を減速してカムシャフト2に伝達する減速機構13と、から主として構成されている。
図10は、電動モータ12の正面図である。図11は、電動モータ12の斜視図である。
電動モータ12は、いわゆるブラシレスの直流型モータである。電動モータ12は、チェーンケースに固定される有底円筒状のモータハウジング16と、モータハウジング16の後端部に設けられて、内部にステータコイルなどが収容されたモータステータと、ステータコイルの内周側に配置されたモータ出力軸17と、モータ出力軸17の外周に固定された円筒状の永久磁石と、モータハウジング16のスプロケット1と反対側の前端部に設けられた給電機構18と、を有している。
モータハウジング16は、ほぼカップ状に形成されている。モータハウジング16の前端部(底壁)におけるほぼ中央には、モータ出力軸17が挿通する貫通孔(不図示)が形成されている。一方、モータハウジング16の後端部における外周には、径方向外側に突出したフランジ部16aが一体に設けられている。フランジ部16aは、円周方向の約120°位置に3つのブラケット片16bが一体に設けられている。また、この3つのブラケット片16bには、ボルト挿通孔16cが貫通形成されている。ボルト挿通孔16cには、不図示のチェーンケースに結合されるボルトが挿通される。
さらに、フランジ部16aの円周方向の各ブラケット片16bの間には、3つのボルト29が挿通する3つのボルト挿通孔が形成されている。各ボルト29は、モータハウジング16に給電機構18を結合する。
なお、ボルト挿通孔16cやボルト29などは、さらに増加することも可能である。
モータステータは、主として合成樹脂材の樹脂部によって一体に形成されている。モータステータの内部には、ステータコイルがモールド固定されている。
給電機構18は、合成樹脂材によってボックス状に形成されている。この給電機構18の内部には、電動モータ12へ給電するバスバーなどの通電回路やモータ出力軸17の回転位置を検出する回転センサなどが収容されている。また、給電機構18の外周部には、通電回路に電気的に接続される給電用コネクタ18aと、不図示の信号用コネクタが設けられている。
給電用コネクタ18aの端子は、雌端子を介して電源であるバッテリーに接続されている。一方、信号用コネクタの端子は、雌端子を介して制御装置101(図3参照)に接続されている。上述の回転センサで検出した回転角信号は、信号用コネクタから制御装置101へ出力される。
モータ出力軸17は、金属材によって円柱状に形成されている。モータ出力軸17における減速機構13側の先端部17aの外面には、接線方向に沿って形成された二面幅部17b、17cが設けられている。また、先端部17aの先端側には、図10に示すように、二面幅部17b、17cに対して直交する方向から切り欠かれた一対の嵌着溝17d、17eが形成されている。嵌着溝17d、17eには、ストッパ部材19が径方向から嵌着固定されている。ストッパ部材19は、後述する中間部材30のカムボルト14方向の移動を規制する規制部である。
図7に示すように、モータ出力軸17は、カムボルト14に近接配置されている。これにより、モータ出力軸17の先端部17aとカムボルト14の頭部14aとの間には、僅かな隙間Cが形成されている。また、先端部17aは、ストッパ部材19を含めた全体が工具穴14cの内部に軸方向から挿入可能になっている。
つまり、先端部17aは、回転軸の直角断面が工具穴14cの直角断面の大きさよりも小さく形成されている。換言すれば、先端部17aの回転軸の直角断面の回転軸を中心とする径方向距離の最大が、工具穴14cの直角断面の回転軸を中心とする径方向距離の最小よりも小さくなっている。また、隙間Cは、内燃機関100の振動などによってモータ出力軸17やカムシャフト2(従動部材9)などが回転軸方向へ移動した際に、モータ出力軸17の先端部17aが工具穴14c内に入ることが可能な大きさになっている。
ストッパ部材19は、Cリング状に形成されている。ストッパ部材19は、拡径方向及び縮径方向へ弾性変形可能になっている。
また、モータ出力軸17の先端部17aには、中間部材30が設けられている。中間部材30は、減速機構13に接続される継手機構であるオルダム継手20の一部を構成する。図10及び図11に示すように、中間部材30は、モータ出力軸17の先端部17aに固定される筒状基部31を有している。筒状基部31は、円形状の外面の両側、つまり円周方向の180°位置に二面幅状の一対の平面部31a、31bを有している。これにより、筒状基部31の外形は、ほぼ長円状に形成されている。
また、筒状基部31の中央には、モータ出力軸17の先端部17aが挿通される貫通孔32が形成されている。
筒状基部31の貫通孔32は、円孤状の一対の内周面と、二面幅状の一対の対向面32a、32bとを有している。これにより、貫通孔32は、筒状基部31の外形と相似形の径方向に長い長円形状に形成されている。したがって、中間部材30は、長円状の貫通孔32を介してモータ出力軸17の先端部17aに対して径方向へ移動可能になっている。
筒状基部31は、一対の平面部31a、31bの長手方向(図10の上下方向)のほぼ中央位置に一対の突出部である2つの伝達キー33a、33bが設けられている。各伝達キー33a、33bは、ほぼ矩形板状に形成されている。各伝達キー33a、33bは、筒状基部31の2つの平面部31a、31bから径方向外側に向かって突出している。
制御装置101(図3参照)は、クランク角センサ121や流量センサ114、水温センサ122、スロットル開度センサ113aなど各種のセンサ類からの情報信号に基づいて現在の内燃機関100の運転状態を検出する。そして、制御装置101は、検出した運転状態に基づいて内燃機関100の制御を行っている。また、制御装置101は、各情報信号や回転位置検出機構に基づいて、コイル部に通電してモータ出力軸17の回転制御を行う。これにより、制御装置101は、減速機構13によってカムシャフト2のスプロケット1に対する相対回転位相を制御する。
減速機構13は、図5に示すように、電動モータ12とは軸方向から分離独立して設けられている。減速機構13の各構成部材は、保持プレート8とフロントプレート15との間のスプロケット1の内部に収容配置されている。
図12は、図1に示すC-C線断面図である。
減速機構13は、図5~図7及び図12に示すように、スプロケット本体1aの内部に一部が配置された入力部材である円筒状の偏心軸21と、偏心軸21の外周に設けられたボールベアリング22と、ボールベアリング22の外周に設けられ、内歯構成部5の各内歯5a内に転動自在に保持された伝達部材であるローラ23と、ローラ23を転動方向に保持しつつ径方向の移動を許容する伝達部(突出部)である保持器24と、保持器24と一体の前述した従動部材9と、から主として構成されている。
偏心軸21は、ニードルベアリング25の外周に配置された偏心軸部21aと、偏心軸部21aの電動モータ12側に設けられた大径円筒部21bと、を有している。ニードルベアリング25は、カムボルト14の頭部14aの外周に設けられた軸受である。
偏心軸部21aは、周方向の肉厚が厚薄変化している。これにより、偏心軸部21aの軸心Xは、カムボルト14の軸心Yに対して僅かに偏心している。
大径円筒部21bは、偏心軸部21aよりも肉厚に形成されている。大径円筒部21bは、中間部材30と共にオルダム継手20を構成している。この大径円筒部21bは、スプロケット本体1aの内部からフロントプレート15の挿入孔15aを介して電動モータ12方向へ突出している。また、大径円筒部21bは、図9に示すように、二面幅状の嵌合孔21cが形成されている。嵌合孔21cには、中間部材30の二面幅状の筒状基部31が軸方向から嵌合可能である。また、大径円筒部21bは、電動モータ12側の先端面の円周方向の約180°の位置に、一対のキー溝21d、21eが形成されている。一対のキー溝21d、21eには、2つの伝達キー33a、33bが回転軸方向から嵌合可能である。
ニードルベアリング25は、複数のニードルローラ25aと、円筒状のシェル25bと、を有している。複数のニードルローラ25aは、カムボルト14の頭部14aの外周面を転動する。シェル25bは、偏心軸部21aの内周面に形成された段差面に固定されている。シェル25bは、内周面にニードルローラ25aを転動可能に保持する複数の溝部を有する。
ボールベアリング22は、図5に示すように、ニードルベアリング25の径方向位置で全体がほぼオーバーラップする状態に配置されている。また、ボールベアリング22は、内輪22aと、外輪22b、これら両輪22a、22bとの間に介装されたボール22cと、ボール22cを保持するケージ22dと、から構成されている。
内輪22aは、偏心軸部21aの外周面に圧入固定されている。外輪22bは、軸方向で固定されることなくフリーな状態になっている。つまり、外輪22bは、軸方向の電動モータ12側の一端面がフロントプレート15の内側面に微小クリアランスを介して非接触状態になっている。また、外輪22bの軸方向の他端面は、これに対向する従動部材9の円盤状本体9aの背面に微小なクリアランスを介して非接触状態になっている。
外輪22bは、外周面に各ローラ23の外周面が転動可能に当接している。また、外輪22bの外周面と保持器24の内面との間には、円環状のクリアランスが形成されている。したがって、ボールベアリング22は、クリアランスを介して全体が偏心軸部21aの偏心回転に伴って径方向へ偏心動可能になっている。
保持器24は、円環板状に形成されている。保持器24は、円盤状本体9aの外周部に一体に設けられている。つまり、保持器24は、円盤状本体9aのジャーナル部11の基部11aからフロントプレート15方向へ直線状に突出している。保持器24の先端面24aとフロントプレート15の内側面15cとの間には、所定のクリアランスが形成されている。
また、保持器24は、複数のローラ保持孔24bを有している。複数のローラ保持孔24bは、複数のローラ23をそれぞれ転動自在に保持する。このローラ保持孔24bは、保持器24の円周方向の等間隔位置に設けられ、先端部側が閉塞されて前後方向に細長い長方形状に形成されている。また、ローラ保持孔24bは、その全体の数(ローラ23の数)が内歯構成部5の内歯5aの全体の歯数よりも少なくなっている。これにより、所定の減速比を得ることができる。
各ローラ23は、鉄系金属によって形成されている。各ローラ23は、ボールベアリング22の偏心動に伴って径方向へ移動しつつ内歯構成部5の内歯5aに嵌入している。また各ローラ23は、保持器24のローラ保持孔24bの両側縁によって周方向にガイドされつつ径方向へ揺動運動する。
また、減速機構13は、図3に示すように、潤滑油供給通路を介して内部に潤滑油が供給されるようになっている。潤滑油供給通路は、内燃機関100のメインオイルギャラリーから分岐されてシリンダヘッド180内からカムシャフト2の内部に形成された油通路26と、従動部材9の円盤状本体9aをカムシャフト2の軸方向に沿って貫通形成された油孔27と、を有している。
油孔27は、上流側の大径な一端部27aと、下流側の小径な他端部27bを有している。油孔27の一端部27aは、油通路26と連通している。油孔27の他端部27bは、ニードルベアリング25のシェル25bにおける側部付近に開口している。
また、油孔27から減速機構13の内部に流入した潤滑油は、ボールベアリング22の内部や外周側の保持器24内などを通り、軸受凹部10とジャーナル部11との間に流入する。つまり、潤滑油は、ジャーナル部11の両端面や外周面と軸受凹部10の内側面10bや滑り軸受面10aとの間を通って潤滑に供される。そして、潤滑油は、フロントプレート15の挿入孔15aから外部に排出される。
なお、メインオイルギャラリーには、不図示のオイルポンプの吐出通路から潤滑油が圧送されるようになっている。
[バルブタイミング制御装置の作用]
以下、本実施形態におけるバルブタイミング制御装置500の作用について説明する。
まず、内燃機関100のクランクシャフト123が回転駆動すると、その回転力がタイミングチェーンを介してスプロケット1に伝達される。これにより、スプロケット1が回転し、この回転力が内歯構成部5に伝達される。内歯構成部5の回転力は、各ローラ23から保持器24及び従動部材9を経由してカムシャフト2に伝達される。その結果、カムシャフト2の駆動カムが各吸気弁106a(図3参照)を開閉作動させる。
内燃機関100の始動後の所定の機関運転時には、制御装置101からの制御電流が電動モータ12のコイル部に通電される。これにより、モータ出力軸17が正逆回転駆動される。このモータ出力軸17の回転力は、偏心軸21に伝達されて、減速機構13の作動により減速された回転力がカムシャフト2に伝達される。
これによって、カムシャフト2が、スプロケット1に対して正逆相対回転して相対回転位相が変換される。したがって、各吸気弁106aは、開閉タイミングを進角側あるいは遅角側に変換制御される。
このように、吸気弁106aの開閉タイミングが進角側あるいは遅角側へ連続的に変換されることによって、内燃機関100の燃費や出力などの性能の向上を図ることができる。
[バルブタイミング制御]
次に、バルブタイミング制御について説明する。本実施形態では、制御装置101のバルブタイミング制御部390がバルブタイミング制御装置500の駆動を制御して、吸気弁106aのリフト量を可変する。
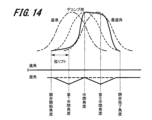
図13は、従来のバルブタイミング制御におけるバルブリフト量の変化について示した図である。図14は、本実施形態に係るバルブタイミング制御におけるバルブリフト量の変化について示した図である。
図13に示すように、従来のバルブタイミング制御では、気筒150(図1参照)内への吸入空気量を減じるために、カムシャフト2の作動角を遅角とする。この時、カムシャフト2の作動角の変化速度は一定である。このため、吸気弁106aのリフト量が少ない(低リフト)期間は、開弁開始初期の短期間に限られる。
図14に示すように、本実施形態に係るバルブタイミング制御では、吸気量を減じるようにカムシャフト2の作動角を遅角させる。また、吸気弁106aの開弁中に、クランクシャフト123に対するカムシャフト2の位相角を変化させる。カムシャフト2の作動角は、遅角、進角の順に動作し、吸気弁106aの1度の開弁中に遅角と進角の動作を2回繰り返す。また、1回目の遅角と進角の動作が行われる期間と、2回目の遅角と進角の動作が行われる期間が同じである。
ここで、吸気弁106aが開弁を開始するクランク角度を開弁開始角度とする。また、吸気弁106aが閉弁を完了するクランク角度を閉弁完了角度とする。また、開弁開始角度と閉弁完了角度との中間を中間角度とする。さらに、開弁開始角度と中間角度との中間を第1中間角度とする。そして、中間角度と閉弁完了角度との中間を第2中間角度とする。
図14に示すように、制御装置101は、吸気弁が開弁を開始する開弁開始角度から第1中間角度を超えるまで、カムシャフト2の作動角を遅角に動作させて、吸気弁106aのリフト量を抑制する。すなわち、カムシャフト2の作動角を遅角に動作させて、吸気弁106aを低リフト位置に維持する。これにより、本実施形態に係るバルブタイミング制御では、吸気弁106aのリフト量が少ない(低リフト)期間が従来のバルブタイミング制御よりも長くなる。開弁開始角度から第1中間角度を超えるまで、カムシャフト2の作動角を遅角に動作させる制御は、本発明に係る第1制御に対応する。
次に、制御装置101は、第1中間角度を超えてから中間角度に至るタイミングでカムシャフト2の作動角を進角に動作させて、吸気弁106aを最大リフト位置に変化させる。開弁開始角度から中間角度まで、カムシャフト2の作動角を遅角と進角の順に動作させる制御は、本発明に係る第1作動角制御に対応する。
次に、制御装置101は、吸気弁106aが最大リフト位置に到達した中間角度から第2中間角度を超えるまで、カムシャフト2の作動角を遅角に動作させて、吸気弁106aを最大リフト位置に維持させる。これにより、吸気弁106aの閉弁が完了するまでに気筒150内へ適切な量の空気を吸入することができる。その結果、吸入空気量が不足しないようにすることができる。中間角度から第2中間角度を超えるまで、カムシャフト2の作動角を遅角に動作させる制御は、本発明に係る第2制御に対応する。
次に、制御装置101は、第2中間角度から閉弁完了角度までカムシャフト2の作動角を進角に動作させる。なお、中間角度から閉弁完了角度まで、カムシャフト2の作動角を遅角と進角の順に動作させる制御は、本発明に係る第2作動角制御に対応する。第1作動角制御を実行する期間と、第2作動角制御を実行する期間は等しい。
図15は、従来のバルブタイミング制御と本実施形態に係るバルブタイミング制御における筒内の乱流エネルギーの変化について示した図である。なお、乱流エネルギーの算出には、CFD(computational fluid dynamics)を用いた。また、開弁時期は、上死点で統一した。
図15に示すように、クランクシャフト123(カムシャフト2)の回転に伴って生じる気筒150内の負圧に対して、吸気弁106aのリフト量が少ない(低リフト)期間が長くなると、乱流エネルギーが大きくなる。したがって、本実施形態に係るバルブタイミング制御における乱流エネルギーは、従来のバルブタイミング制御における乱流エネルギーよりも大きい。
乱流エネルギーが増大すると、気筒150内の空気と燃料が撹拌され易くなる。これにより、混合ガスが均質化されるため、点火プラグ200の電極周りのガスが最適となる。その結果、混合ガスの着火性が改善し、失火を防止することができる。
図16は、本実施形態に係る制御方法を示すタイミングチャートである。
図16に示すように、エンジン(内燃機関100)の再始動要求が行われた時点であるt5において、吸気弁106a(吸気バルブ)の開弁タイミングは、遅角が最大である。そして、t5において、気筒150内への吸入空気量はゼロである。エンジンの再始動要求と同時に吸気弁106aの開弁タイミングが進角し、吸入空気量が増加する。
エンジンの再始動の開始直後における吸入空気流量は少ない。しかし、本実施形態に係るバルブタイミング制御を実施することにより、カムシャフト2の作動角の変化速度を可変する。これにより、吸気弁106aのリフト量が少ない(低リフト)期間を従来のバルブタイミング制御よりも長くすることができる。その結果、気筒150内の乱流エネルギーを従来のバルブタイミング制御よりも大きくして、着火に必要な流動を得ることができる。
2.まとめ
以上説明したように、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)は、クランクシャフト(クランクシャフト123)の回転とカムシャフト(カムシャフト2)の回転の相対回転位相を変更して、カムシャフトにより開閉される吸気弁(吸気弁106a)のリフト量を可変するバルブタイミング制御装置(バルブタイミング制御装置500)と、クランクシャフトの回転角度であるクランク角度を検出するクランク角センサ(クランク角センサ121)とを備える内燃機関を制御する。ここで、吸気弁が開弁を開始するクランク角度を開弁開始角度、吸気弁が閉弁を完了するクランク角度を閉弁完了角度、開弁開始角度と閉弁完了角度との中間を中間角度、開弁開始角度と中間角度との中間を第1中間角度と定義する。内燃機関の制御装置は、バルブタイミング制御装置を制御し、吸気弁が開弁を開始した後、第1中間角度を超えるまで吸気弁のリフト量を抑制し、その後、中間角度に至るタイミングで吸気弁を最大リフト位置に変化させるバルブタイミング制御部(バルブタイミング制御部390)を有する。
これにより、吸気弁のリフト量が少ない(低リフト)期間を、従来のバルブタイミング制御よりも長くすることができる。その結果、従来のバルブタイミング制御によりも乱流エネルギーを大きくすることができる。したがって、気筒(気筒150)内の空気と燃料が撹拌され易くなり、混合ガスが均質化される。そのため、混合ガスの着火性が改善し、失火を防止することができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)において、中間角度と閉弁完了角度との中間を第2中間角度と定義する。バルブタイミング制御部(バルブタイミング制御部390)は、吸気弁(吸気弁106a)が最大リフト位置に到達した後、第2中間角度を超えるまで吸気弁を最大リフト位置に維持させる。これにより、吸気弁の閉弁が完了するまでに気筒(気筒150)内へ適切な量の空気を吸入することができる。その結果、吸入空気量が不足しないようにすることができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)におけるバルブタイミング制御部(バルブタイミング制御部390)は、吸気弁(吸気弁106a)の開弁開始から閉弁完了するまでの期間に、(カムシャフト2)を遅角側に制御する第1制御を実施することにより、吸気弁が開弁開始した後、吸気弁のリフト量を抑制する。これにより、吸気弁のリフト量が少ない(低リフト)期間を、従来のバルブタイミング制御よりも長くすることができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)におけるバルブタイミング制御部(バルブタイミング制御部390)は、第1制御を実施してから、カムシャフト(カムシャフト2)を進角側に戻す制御を行った後、吸気弁(吸気弁106a)が最大リフト位置に到達するタイミングで、カムシャフトを遅角側に制御する第2制御を実施することにより、吸気弁を最大リフト位置に維持させる。これにより、吸入空気量が不足しないようにすることができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)は、クランクシャフト(クランクシャフト123)の回転とカムシャフト(カムシャフト2)の回転の相対回転位相を変更して、カムシャフトにより開閉される吸気弁(吸気弁106a)のリフト量を可変するバルブタイミング制御装置(バルブタイミング制御装置500)と、クランクシャフトの回転角度であるクランク角度を検出するクランク角センサ(クランク角センサ121)とを備える内燃機関を制御する。内燃機関の制御装置は、バルブタイミング制御装置を制御し、吸気弁が開弁を開始してから閉弁を完了するまでの間に、カムシャフトの作動角を遅角と進角の順に制御する第1作動角制御を実施するバルブタイミング制御部(バルブタイミング制御部390)を有する。これにより、従来のバルブタイミング制御によりも乱流エネルギーを大きくすることができる。その結果、混合ガスの着火性を改善して、失火を防止することができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)におけるバルブタイミング制御部(バルブタイミング制御部390)は、第1作動角制御の後に、カムシャフト(カムシャフト2)の作動角を遅角と進角の順に制御する第2作動角制御を実施する。これにより、吸気弁の閉弁が完了するまでに気筒(気筒150)内へ適切な量の空気を吸入することができる。その結果、吸入空気量が不足しないようにすることができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)において、第1作動角制御と第2作動角制御の実施期間は等しい。これにより、乱流エネルギーを大きくすることと、吸入空気量が不足しないようにすることの両立を図ることができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)において、吸気弁が開弁を開始するクランク角度を開弁開始角度、吸気弁が閉弁を完了するクランク角度を閉弁完了角度、開弁開始角度と閉弁完了角度との中間を中間角度、開弁開始角度と中間角度との中間を第1中間角度と定義する。第1作動角制御は、開弁開始角度から中間角度となる期間に実施する。第2作動角制御は、中間角度から閉弁完了角度となる期間に実施する。これにより、第1作動角制御と第2作動角制御の実施期間を等しくすることができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御装置(制御装置101)において、吸気弁(吸気弁106a)の開弁は、内燃機関の始動時におけるクランクシャフト(クランクシャフト123)の回転開始から最初の開弁である。これにより、内燃機関の始動時における気筒(気筒150)内の圧縮圧力の変化を小さくすることができる。その結果、内燃機関の始動時における振動を抑制することができる。また、混合ガスの着火性が改善し、失火を防止することができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御方法は、クランクシャフト(クランクシャフト123)の回転とカムシャフト(カムシャフト2)の回転の相対回転位相を変更して、カムシャフトにより開閉される吸気弁(吸気弁106a)のリフト量を可変するバルブタイミング制御装置(バルブタイミング制御装置500)と、クランクシャフトの回転角度であるクランク角度を検出するクランク角センサ(クランク角センサ121)と、を備える内燃機関の制御方法である。ここで、吸気弁が開弁を開始するクランク角度を開弁開始角度、吸気弁が閉弁を完了するクランク角度を閉弁完了角度、開弁開始角度と閉弁完了角度との中間を中間角度、開弁開始角度と中間角度との中間を第1中間角度と定義する。内燃機関の制御方法は、吸気弁が開弁を開始した後、第1中間角度を超えるまで吸気弁のリフト量を抑制し、その後、中間角度に至るタイミングで吸気弁を最大リフト位置に変化させる。これにより、従来のバルブタイミング制御によりも乱流エネルギーを大きくすることができる。その結果、混合ガスの着火性を改善して、失火を防止することができる。
また、上述した実施形態に係る内燃機関(内燃機関100)の制御方法は、クランクシャフト(クランクシャフト123)の回転とカムシャフト(カムシャフト2)の回転の相対回転位相を変更して、カムシャフトにより開閉される吸気弁(吸気弁106a)のリフト量を可変するバルブタイミング制御装置(バルブタイミング制御装置500)と、クランクシャフトの回転角度であるクランク角度を検出するクランク角センサ(クランク角センサ121)と、を備える内燃機関の制御方法である。この内燃機関の制御方法は、吸気弁が開弁を開始してから閉弁を完了するまでの間に、カムシャフトの作動角を遅角と進角の順に制御する第1作動角制御を実施する。これにより、従来のバルブタイミング制御によりも乱流エネルギーを大きくすることができる。その結果、混合ガスの着火性を改善して、失火を防止することができる。
以上、本発明の内燃機関の制御装置、及び内燃機関の制御方法の実施形態について、その作用効果も含めて説明した。しかしながら、本発明の内燃機関の制御装置、及び内燃機関の制御方法は、上述の実施形態に限定されるものではなく、請求の範囲に記載した発明の要旨を逸脱しない範囲内で種々の変形実施が可能である。
また、上述した実施形態は、本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施形態の構成の一部を他の実施形態の構成に置き換えることが可能であり、また、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
例えば、上述した実施形態では、開弁開始角度から第1中間角度を超えるまで、カムシャフト2の作動角を遅角に動作させる第1制御と、中間角度から第2中間角度を超えるまで、カムシャフト2の作動角を遅角に動作させる第2制御を実施する。しかし、本発明に係るバルブタイミング制御としては、少なくとも第1制御を実施すればよい。第1制御を実施することにより、吸気弁のリフト量が少ない(低リフト)期間を、従来のバルブタイミング制御よりも長くすることができる。その結果、従来のバルブタイミング制御によりも乱流エネルギーを大きくすることができため、混合ガスの着火性が改善し、失火を防止することができる。
また、上述した実施形態では、吸気弁106aの1度の開弁中に遅角と進角の動作を2回繰り返すようにした。しかし、本発明に係るバルブタイミング制御としては、吸気弁の1度の開弁中に遅角と進角の動作を3回以上繰り返すようにしてもよい。