JP7286586B2 - 測距システム及び測距センサのキャリブレーション方法 - Google Patents
測距システム及び測距センサのキャリブレーション方法 Download PDFInfo
- Publication number
- JP7286586B2 JP7286586B2 JP2020085253A JP2020085253A JP7286586B2 JP 7286586 B2 JP7286586 B2 JP 7286586B2 JP 2020085253 A JP2020085253 A JP 2020085253A JP 2020085253 A JP2020085253 A JP 2020085253A JP 7286586 B2 JP7286586 B2 JP 7286586B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- person
- sensors
- sensor
- distance measuring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/50—Systems of measurement based on relative movement of target
- G01S17/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/87—Combinations of systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/51—Display arrangements
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
図5A(1)は、反射テープ8を測定空間の床面4に配置(貼り付け)した状態を示す。センサ1a,1bは、測定空間(xyz座標で示す)の水平位置(x1,y1)、(x2,y2)に設置している。両者の設置高さzは簡単のために同一としているが、異なっていても演算で補正が可能である。また、センサ1a,1bの測定方向(視野角の中心方向)の方位角をθ1,θ2で表す。なお、両者の仰俯角は同一としているが、異なっていても演算で補正が可能である。反射テープ8は、入射した光を入射方向に向けて反射する特性を持つ再帰性反射材からなり、例えば床面4に十字状に貼り付ける。
図6A(1)は、人物9が測定空間の床面4を移動している状態を示す。なお、センサ1a,1bの設定位置(x1,y1)、(x2,y2)と測定方向(方位角)θ1,θ2は前記図5Aと同様である。人物9は時刻t0からt2にかけて、床面4上を破線のように移動したものとする。
図7は、動線データの信頼度の評価とその表示例を示す図である。センサ1aで測定した動線データとして4つの例91~94を示す。動線91はセンサ1aから近い位置にあり、動線92は検出位置が視野角の端部にある場合である。また、動線93はセンサ1aから遠い位置にあり、動線94は移動経路の手前に障害物95が存在する場合である。動線91を基準に比較すると、動線92は視野角の端部にあるため受光量が少なく、動線93は遠い位置にあるため点群量が少なく、動線94は動線の一部が欠落している。よってこれらの動線91~94を表示するとき、信頼度の高い動線91は濃く表示し、信頼度の低い他の動線92~94は薄く表示する。あるいは、信頼度に応じて動線の色を変えて表示してもよい。これにより作業者は、複数の動線から信頼度の高い動線を選択し、キャリブレーションに使用することができる。
S102:連携処理装置2からの指示で、各センサ1は測定空間の距離データを所定時間にわたって取得し、連携処理装置2に送信する。
S104:さらに人物検知部25では、検出した人物(動線データ)についてその信頼度を評価する。これは、キャリブレーション処理に用いる上で最も確度の高いデータを抽出するための評価であって、センサからの距離が近い人物、点群量が多い人物、また検出方向が視野角の中央寄りであること、などを条件に評価する。
S106:座標変換した人物データは十分であるか否かを判定する。すなわち、各センサで検出した人物の付随情報(時刻、身長)がセンサ間で互いに一致しているかどうかを判定する。データが十分であればS107へ進み、十分でなければS102に戻り、再度距離データを取得する。
S108:キャリブレーション部26は、各センサで取得された動線の類似度を算出する。すなわち、動線の形状(パターン)が互いに類似している箇所を抽出する。そのため、時刻が対応する各センサからの動線部分を比較し、パターンマッチング法により動線の類似度を求める。
S110:キャリブレーション結果は、座標変換部22により再度動線位置を座標変換し、表示部24に描画される。作業者は修正後の動線位置を見て十分かどうかを判定する。十分であればこれでキャリブレーション処理を終了し、不十分であればS107に戻り、位置合わせを繰り返し行う。
2:連携処理装置、
3:ネットワーク、
4:床面、
8:反射テープ、
9:対象物(人物)、
9a,9b、91~94:動線、
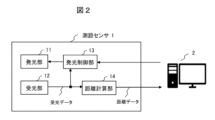
11:発光部、
12:受光部、
13:発光制御部、
14:距離計算部、
21:データ入力部、
22:座標変換部、
23:画像合成部、
24:表示部、
25:人物検知部、
26:キャリブレーション部。
Claims (12)
- 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する測距システムにおいて、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行い、前記複数の測距センサからの距離データを合成して対象物の距離画像を表示する連携処理装置を備え、
前記連携処理装置は、前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物の軌跡(以下、動線と呼ぶ)を取得し、各測距センサで取得した動線が共通の座標系で一致するように各測距センサの設置位置のキャリブレーションを行い、
前記連携処理装置は、
前記複数の測距センサのセンサ設置情報を用いて、前記複数の測距センサからの距離データを共通の座標系の位置データに変換する座標変換部と、
各測定データを合成して1つの距離画像を生成する画像合成部と、
合成した距離画像を表示する表示部と、
前記複数の測距センサから入力した距離データからキャリブレーションに有効な人物の動線を検知する人物検知部と、
前記人物の動線を合成した距離画像の結果を基に、前記座標変換部で用いる前記センサ設置情報を修正するキャリブレーション部と、
を備え、
前記人物検知部は、検知した人物の付随情報として人物の身長情報を取得し、
前記キャリブレーション部は、前記複数の測距センサで取得した人物の動線の位置合わせを行うとき、動線の類似度を算出するとともに、前記人物検知部で取得した人物の身長情報と距離データを取得した時刻情報とを参照し、該身長情報または該時刻情報が一致する動線の間で位置合わせを行うことを特徴とする測距システム。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する測距システムにおいて、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行い、前記複数の測距センサからの距離データを合成して対象物の距離画像を表示する連携処理装置を備え、
前記連携処理装置は、前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物の軌跡(以下、動線と呼ぶ)を取得し、各測距センサで取得した動線が共通の座標系で一致するように各測距センサの設置位置のキャリブレーションを行い、
前記連携処理装置は、
前記複数の測距センサのセンサ設置情報を用いて、前記複数の測距センサからの距離データを共通の座標系の位置データに変換する座標変換部と、
各測定データを合成して1つの距離画像を生成する画像合成部と、
合成した距離画像を表示する表示部と、
前記複数の測距センサから入力した距離データからキャリブレーションに有効な人物の動線を検知する人物検知部と、
前記人物の動線を合成した距離画像の結果を基に、前記座標変換部で用いる前記センサ設置情報を修正するキャリブレーション部と、
を備え、
前記人物検知部は、検知した人物の付随情報として前記測距センサから人物までの距離を取得するとともに、検知した人物について、前記測距センサから人物までの距離に応じて動線の信頼度を評価し、
前記キャリブレーション部は、前記人物検知部により信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距システム。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する測距システムにおいて、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行い、前記複数の測距センサからの距離データを合成して対象物の距離画像を表示する連携処理装置を備え、
前記連携処理装置は、前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物の軌跡(以下、動線と呼ぶ)を取得し、各測距センサで取得した動線が共通の座標系で一致するように各測距センサの設置位置のキャリブレーションを行い、
前記連携処理装置は、
前記複数の測距センサのセンサ設置情報を用いて、前記複数の測距センサからの距離データを共通の座標系の位置データに変換する座標変換部と、
各測定データを合成して1つの距離画像を生成する画像合成部と、
合成した距離画像を表示する表示部と、
前記複数の測距センサから入力した距離データからキャリブレーションに有効な人物の動線を検知する人物検知部と、
前記人物の動線を合成した距離画像の結果を基に、前記座標変換部で用いる前記センサ設置情報を修正するキャリブレーション部と、
を備え、
前記人物検知部は、検知した人物の付随情報として人物領域に含まれる点群量を取得するとともに、検知した人物について、人物領域に含まれる点群量に応じて動線の信頼度を評価し、
前記キャリブレーション部は、前記人物検知部により信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距システム。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する測距システムにおいて、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行い、前記複数の測距センサからの距離データを合成して対象物の距離画像を表示する連携処理装置を備え、
前記連携処理装置は、前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物の軌跡(以下、動線と呼ぶ)を取得し、各測距センサで取得した動線が共通の座標系で一致するように各測距センサの設置位置のキャリブレーションを行い、
前記連携処理装置は、
前記複数の測距センサのセンサ設置情報を用いて、前記複数の測距センサからの距離データを共通の座標系の位置データに変換する座標変換部と、
各測定データを合成して1つの距離画像を生成する画像合成部と、
合成した距離画像を表示する表示部と、
前記複数の測距センサから入力した距離データからキャリブレーションに有効な人物の動線を検知する人物検知部と、
前記人物の動線を合成した距離画像の結果を基に、前記座標変換部で用いる前記センサ設置情報を修正するキャリブレーション部と、
を備え、
前記人物検知部は、検知した人物の付随情報として視野角内の人物の検出方向を取得するとともに、検知した人物について、視野角内の人物の検出方向に応じて動線の信頼度を評価し、
前記キャリブレーション部は、前記人物検知部により信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距システム。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する測距システムにおいて、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行い、前記複数の測距センサからの距離データを合成して対象物の距離画像を表示する連携処理装置を備え、
前記連携処理装置は、前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物の軌跡(以下、動線と呼ぶ)を取得し、各測距センサで取得した動線が共通の座標系で一致するように各測距センサの設置位置のキャリブレーションを行い、
前記連携処理装置は、
前記複数の測距センサのセンサ設置情報を用いて、前記複数の測距センサからの距離データを共通の座標系の位置データに変換する座標変換部と、
各測定データを合成して1つの距離画像を生成する画像合成部と、
合成した距離画像を表示する表示部と、
前記複数の測距センサから入力した距離データからキャリブレーションに有効な人物の動線を検知する人物検知部と、
前記人物の動線を合成した距離画像の結果を基に、前記座標変換部で用いる前記センサ設置情報を修正するキャリブレーション部と、
を備え、
前記人物検知部は、検知した人物の付随情報として人物の手前に障害物が存在するか否かを取得するとともに、検知した人物について、人物の手前に障害物が存在するか否かに応じて動線の信頼度を評価し、
前記キャリブレーション部は、前記人物検知部により信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距システム。 - 請求項2~5のいずれか1項に記載の測距システムにおいて、
前記人物検知部にて評価した動線の信頼度に応じて、前記表示部には、動線の濃度または色を変えて表示することを特徴とする測距システム。 - 請求項1に記載の測距システムにおいて、
前記人物検知部により検知した人物の動線からキャリブレーションに有効な動線をユーザが選択し、前記キャリブレーション部により前記センサ設置情報を修正するときにユーザが微調整するためのユーザ調整部を備えることを特徴とする測距システム。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する際の前記測距センサのキャリブレーション方法において、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物を検知しその軌跡(以下、動線と呼ぶ)を取得するステップと、
各測距センサで取得した動線が共通の座標系で一致するように各測距センサのセンサ設置情報のキャリブレーションを行うステップと、
を備え、
前記動線を取得するステップでは、検知した人物の付随情報として人物の身長情報を取得し、
前記キャリブレーションを行うステップでは、前記複数の測距センサで取得した動線の類似度を算出するとともに、前記検知した人物の身長情報と距離を測定した時刻情報とを参照し、該身長情報または該時刻情報が一致する動線の間で位置合わせを行うことを特徴とする測距センサのキャリブレーション方法。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する際の前記測距センサのキャリブレーション方法において、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物を検知しその軌跡(以下、動線と呼ぶ)を取得するステップと、
各測距センサで取得した動線が共通の座標系で一致するように各測距センサのセンサ設置情報のキャリブレーションを行うステップと、
を備え、
前記動線を取得するステップでは、検知した人物の付随情報として前記測距センサから人物までの距離を取得するとともに、検知した人物について、前記測距センサから人物までの距離に応じて動線の信頼度を評価し、
前記キャリブレーションを行うステップでは、前記動線を取得するステップにて信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距センサのキャリブレーション方法。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する際の前記測距センサのキャリブレーション方法において、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物を検知しその軌跡(以下、動線と呼ぶ)を取得するステップと、
各測距センサで取得した動線が共通の座標系で一致するように各測距センサのセンサ設置情報のキャリブレーションを行うステップと、
を備え、
前記動線を取得するステップでは、検知した人物の付随情報として人物領域に含まれる点群量を取得するとともに、検知した人物について、人物領域に含まれる点群量に応じて動線の信頼度を評価し、
前記キャリブレーションを行うステップでは、前記動線を取得するステップにて信頼度
が高いと評価された動線の間で位置合わせを行うことを特徴とする測距センサのキャリブレーション方法。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する際の前記測距センサのキャリブレーション方法において、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物を検知しその軌跡(以下、動線と呼ぶ)を取得するステップと、
各測距センサで取得した動線が共通の座標系で一致するように各測距センサのセンサ設置情報のキャリブレーションを行うステップと、
を備え、
前記動線を取得するステップでは、検知した人物の付随情報として視野角内の人物の検出方向を取得するとともに、検知した人物について、視野角内の人物の検出方向に応じて動線の信頼度を評価し、
前記キャリブレーションを行うステップでは、前記動線を取得するステップにて信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距センサのキャリブレーション方法。 - 複数の測距センサを設置して測定領域内の対象物の距離画像を生成する際の前記測距センサのキャリブレーション方法において、
前記測距センサは、光の伝達時間に基づいて対象物までの距離を測定する方式のものであって、
前記測距センサ間の位置合わせを行うため、前記複数の測距センサにより測定領域内を移動する人物を検知しその軌跡(以下、動線と呼ぶ)を取得するステップと、
各測距センサで取得した動線が共通の座標系で一致するように各測距センサのセンサ設置情報のキャリブレーションを行うステップと、
を備え、
前記動線を取得するステップでは、検知した人物の付随情報として人物の手前に障害物が存在するか否かを取得するとともに、検知した人物について、人物の手前に障害物が存在するか否かに応じて動線の信頼度を評価し、
前記キャリブレーションを行うステップでは、前記動線を取得するステップにて信頼度が高いと評価された動線の間で位置合わせを行うことを特徴とする測距センサのキャリブレーション方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020085253A JP7286586B2 (ja) | 2020-05-14 | 2020-05-14 | 測距システム及び測距センサのキャリブレーション方法 |
| US17/215,221 US20210356593A1 (en) | 2020-05-14 | 2021-03-29 | Distance measurement system and method for calibrating distance measurement sensor |
| CN202110382150.3A CN113671513B (zh) | 2020-05-14 | 2021-04-09 | 测距系统以及测距传感器的校准方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020085253A JP7286586B2 (ja) | 2020-05-14 | 2020-05-14 | 測距システム及び測距センサのキャリブレーション方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021179376A JP2021179376A (ja) | 2021-11-18 |
| JP7286586B2 true JP7286586B2 (ja) | 2023-06-05 |
Family
ID=78511259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020085253A Active JP7286586B2 (ja) | 2020-05-14 | 2020-05-14 | 測距システム及び測距センサのキャリブレーション方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20210356593A1 (ja) |
| JP (1) | JP7286586B2 (ja) |
| CN (1) | CN113671513B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7245767B2 (ja) * | 2019-12-23 | 2023-03-24 | 株式会社日立エルジーデータストレージ | 全方位測距装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009020800A (ja) | 2007-07-13 | 2009-01-29 | Casio Comput Co Ltd | 特徴点追跡装置及びプログラム |
| JP2009140060A (ja) | 2007-12-04 | 2009-06-25 | Sony Computer Entertainment Inc | 画像処理装置、画像評価方法、プログラム及び情報記憶媒体 |
| JP2012088135A (ja) | 2010-10-19 | 2012-05-10 | Advanced Telecommunication Research Institute International | 距離センサのキャリブレーション装置、キャリブレーションプログラムおよびキャリブレーション方法 |
| JP2017106749A (ja) | 2015-12-07 | 2017-06-15 | 株式会社Hielero | 点群データ取得システム及びその方法 |
| JP2018159693A (ja) | 2017-03-24 | 2018-10-11 | 富士通株式会社 | 情報処理プログラム、情報処理方法、および情報処理装置 |
| US20190253621A1 (en) | 2018-02-10 | 2019-08-15 | Goodrich Corporation | Distributed aperture systems for obstacle avoidance |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001056853A (ja) * | 1999-08-19 | 2001-02-27 | Matsushita Electric Ind Co Ltd | 挙動検出装置および種類識別装置、並びに挙動検出方法および挙動検出用プログラムが記録された記録媒体 |
| JP2009143722A (ja) * | 2007-12-18 | 2009-07-02 | Mitsubishi Electric Corp | 人物追跡装置、人物追跡方法及び人物追跡プログラム |
| US20120020518A1 (en) * | 2009-02-24 | 2012-01-26 | Shinya Taguchi | Person tracking device and person tracking program |
| JP5756709B2 (ja) * | 2011-08-03 | 2015-07-29 | 綜合警備保障株式会社 | 身長推定装置、身長推定方法、及び身長推定プログラム |
| JP5950296B2 (ja) * | 2012-01-27 | 2016-07-13 | 国立研究開発法人産業技術総合研究所 | 人物追跡属性推定装置、人物追跡属性推定方法、プログラム |
| JP5950122B2 (ja) * | 2013-12-27 | 2016-07-13 | 株式会社国際電気通信基礎技術研究所 | キャリブレーション装置、キャリブレーション方法およびキャリブレーションプログラム |
| JP2016162409A (ja) * | 2015-03-05 | 2016-09-05 | 沖電気工業株式会社 | 画像処理装置、画像処理システム、画像処理方法及びプログラム |
| CN107590439B (zh) * | 2017-08-18 | 2020-12-15 | 湖南文理学院 | 基于监控视频的目标人物识别追踪方法和装置 |
| CA3028659C (en) * | 2017-12-11 | 2021-10-12 | Beijing Didi Infinity Technology And Development Co., Ltd. | Systems and methods for identifying and positioning objects around a vehicle |
| JP7339485B2 (ja) * | 2018-10-22 | 2023-09-06 | 国立大学法人大阪大学 | 計測システム |
| CN109671101A (zh) * | 2018-11-30 | 2019-04-23 | 江苏文化投资管理集团有限公司 | 行为轨迹采集装置及智能终端 |
| CN111046834B (zh) * | 2019-12-24 | 2021-07-06 | 南京烽火星空通信发展有限公司 | 一种基于自动学习分析的监控视频人物比例矫正方法 |
-
2020
- 2020-05-14 JP JP2020085253A patent/JP7286586B2/ja active Active
-
2021
- 2021-03-29 US US17/215,221 patent/US20210356593A1/en active Pending
- 2021-04-09 CN CN202110382150.3A patent/CN113671513B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009020800A (ja) | 2007-07-13 | 2009-01-29 | Casio Comput Co Ltd | 特徴点追跡装置及びプログラム |
| JP2009140060A (ja) | 2007-12-04 | 2009-06-25 | Sony Computer Entertainment Inc | 画像処理装置、画像評価方法、プログラム及び情報記憶媒体 |
| JP2012088135A (ja) | 2010-10-19 | 2012-05-10 | Advanced Telecommunication Research Institute International | 距離センサのキャリブレーション装置、キャリブレーションプログラムおよびキャリブレーション方法 |
| JP2017106749A (ja) | 2015-12-07 | 2017-06-15 | 株式会社Hielero | 点群データ取得システム及びその方法 |
| JP2018159693A (ja) | 2017-03-24 | 2018-10-11 | 富士通株式会社 | 情報処理プログラム、情報処理方法、および情報処理装置 |
| US20190253621A1 (en) | 2018-02-10 | 2019-08-15 | Goodrich Corporation | Distributed aperture systems for obstacle avoidance |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113671513B (zh) | 2024-02-23 |
| US20210356593A1 (en) | 2021-11-18 |
| CN113671513A (zh) | 2021-11-19 |
| JP2021179376A (ja) | 2021-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9967545B2 (en) | System and method of acquiring three-dimensional coordinates using multiple coordinate measurment devices | |
| US9322654B2 (en) | Laser tracker with a target sensing unit for target tracking and orientation detection | |
| JP5073256B2 (ja) | 位置測定装置及び位置測定方法及び位置測定プログラム | |
| CN103415780B (zh) | 用于确定测量仪的位置和定向的方法和系统 | |
| JP2011530209A (ja) | 走査された光線のオーバーレイ投影 | |
| JP6753107B2 (ja) | 距離測定装置、距離測定方法及びプログラム | |
| JP6863185B2 (ja) | 距離測定装置、距離測定方法及びプログラム | |
| WO2020156299A1 (zh) | 基于三维光学成像传感器的三维超声成像方法和系统 | |
| JP7064163B2 (ja) | 3次元情報取得システム | |
| JP2008165800A (ja) | カーソル制御方法及び装置 | |
| US12025468B2 (en) | Optical sensor with overview camera | |
| CN113406655B (zh) | 测距装置的测量值修正方法和测距装置 | |
| CN113884081B (zh) | 测定定位点三维坐标的方法及设备 | |
| JP6955203B2 (ja) | 物体検出システム及び物体検出プログラム | |
| US11692812B2 (en) | System and method for measuring three-dimensional coordinates | |
| JP7286586B2 (ja) | 測距システム及び測距センサのキャリブレーション方法 | |
| JP2009092535A (ja) | 光学式変位計 | |
| CN102401901B (zh) | 测距系统及测距方法 | |
| JP2023159835A (ja) | 測距システム及び測距センサのキャリブレーション方法 | |
| KR102290218B1 (ko) | 복수의 카메라를 이용한 위치추적 시스템 및 이를 이용한 위치추적 방법 | |
| JP4024124B2 (ja) | 位置特定装置、その方法およびそのプログラム | |
| JP7411539B2 (ja) | 測距システム及びその座標キャリブレーション方法 | |
| KR20080101570A (ko) | 물체의 외곽 단면과 입체 형상을 측정하는 장치 및 방법 | |
| EP1379833B1 (en) | Method for indicating a point in a measurement space | |
| WO2020179382A1 (ja) | 監視装置、及び監視方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220601 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230516 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230524 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7286586 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |