JP7281500B2 - 画像データの取得方法および取得システム - Google Patents
画像データの取得方法および取得システム Download PDFInfo
- Publication number
- JP7281500B2 JP7281500B2 JP2021083227A JP2021083227A JP7281500B2 JP 7281500 B2 JP7281500 B2 JP 7281500B2 JP 2021083227 A JP2021083227 A JP 2021083227A JP 2021083227 A JP2021083227 A JP 2021083227A JP 7281500 B2 JP7281500 B2 JP 7281500B2
- Authority
- JP
- Japan
- Prior art keywords
- image data
- photographing
- estimation model
- photographing device
- estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 31
- 239000007788 liquid Substances 0.000 claims description 48
- 239000002245 particle Substances 0.000 claims description 23
- 238000009826 distribution Methods 0.000 claims description 16
- 238000005259 measurement Methods 0.000 claims description 16
- 238000012545 processing Methods 0.000 claims description 13
- 239000002689 soil Substances 0.000 claims description 13
- 238000005286 illumination Methods 0.000 claims description 10
- 230000003746 surface roughness Effects 0.000 claims description 10
- 239000004576 sand Substances 0.000 claims description 9
- 238000003860 storage Methods 0.000 claims description 7
- 239000000203 mixture Substances 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 239000013049 sediment Substances 0.000 description 6
- 238000010276 construction Methods 0.000 description 5
- 238000009792 diffusion process Methods 0.000 description 5
- 230000004308 accommodation Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000007667 floating Methods 0.000 description 3
- 238000010801 machine learning Methods 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000013135 deep learning Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000010998 test method Methods 0.000 description 2
- 238000009825 accumulation Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000000123 paper Substances 0.000 description 1
- 229920003217 poly(methylsilsesquioxane) Polymers 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 238000004062 sedimentation Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images





Landscapes
- Studio Devices (AREA)
Description
本発明の別の画像データの取得方法は、推定モデルの生成および使用に用いられる画像データを撮影装置によって撮影して取得するそれぞれの撮影工程で、それぞれの前記画像データの対象物および前記撮影装置の少なくとも画像取得部を、遮光性を有する収容部の内部に配置し、前記収容部の外部の光を遮った状態にして、前記収容部の内部を照らす照明手段を用いて前記対象物に対する照度を同一に設定するとともに、撮影背景仕様を同一に設定し、前記推定モデルによる推定結果と、前記推定モデルの推定に対応する実測結果との差異に基づいて、前記撮影背景仕様のうち背景色を変更して、前記背景色を前記差異をより小さくさせる色に設定することを特徴とする。
本発明のさらに別の画像データの取得方法は、推定モデルの生成および使用に用いられる画像データを撮影装置によって撮影して取得するそれぞれの撮影工程で、それぞれの前記画像データの対象物および前記撮影装置の少なくとも画像取得部を、遮光性を有する収容部の内部に配置し、前記収容部の外部の光を遮った状態にして、前記収容部の内部を照らす照明手段を用いて前記対象物に対する照度を同一に設定するとともに、撮影背景仕様を同一に設定し、前記推定モデルによる推定結果と推定モデルの推定に対応する実測結果との差異に基づいて、前記撮影背景仕様のうち背景面の表面粗さを変更して、前記表面粗さを前記差異をより小さくさせる粗さに設定することを特徴とする。
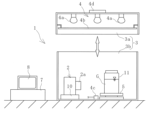
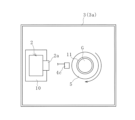
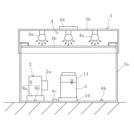
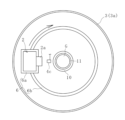
2 撮影装置
2a 画像取得部
3 収容部
3a 本体
3b 開閉蓋
4 照明手段
4a 発光部(電灯)
4b 拡散板
4c 照度計
4d コントローラ
5 回転台
6 移動機構
6a 移動台
6b ガイド
7 演算部
8 モニタ
9 背景板
9a 表面(背景面)
10 固定台
11 容器
12 入力層
13(13a、13b、13c) 中間層
14 出力層
15 ノード
G 対象物(混合液)
Claims (7)
- 推定モデルの生成および使用に用いられる画像データを撮影装置によって撮影して取得するそれぞれの撮影工程で、それぞれの前記画像データの対象物および前記撮影装置の少なくとも画像取得部を、遮光性を有する収容部の内部に配置し、前記収容部の外部の光を遮った状態にして、前記収容部の内部を照らす照明手段を用いて前記対象物に対する照度を同一に設定するとともに、撮影背景仕様を同一に設定し、前記対象物が透明性を有する容器に収容された、規定の混合率で土砂を液体に混合させた混合液であり、前記混合液が収容された前記容器を統一した条件で加振した後に所定位置に載置して規定時間経過時にそれぞれの前記画像データを前記容器の側方から撮影して取得することを特徴とする土砂の粒度分布を推定するための画像データの取得方法。
- 前記撮影装置を基準にして前記対象物の背面側に前記収容部とは別体の背景板を設置して、この背景板の表面を前記画像データを撮影する際の背景面として使用する請求項1に記載の画像データの取得方法。
- 推定モデルの生成および使用に用いられる画像データを撮影装置によって撮影して取得するそれぞれの撮影工程で、それぞれの前記画像データの対象物および前記撮影装置の少なくとも画像取得部を、遮光性を有する収容部の内部に配置し、前記収容部の外部の光を遮った状態にして、前記収容部の内部を照らす照明手段を用いて前記対象物に対する照度を同一に設定するとともに、撮影背景仕様を同一に設定し、前記推定モデルによる推定結果と、前記推定モデルの推定に対応する実測結果との差異に基づいて、前記撮影背景仕様のうち背景色を変更して、前記背景色を前記差異をより小さくさせる色に設定することを特徴とする画像データの取得方法。
- 推定モデルの生成および使用に用いられる画像データを撮影装置によって撮影して取得するそれぞれの撮影工程で、それぞれの前記画像データの対象物および前記撮影装置の少なくとも画像取得部を、遮光性を有する収容部の内部に配置し、前記収容部の外部の光を遮った状態にして、前記収容部の内部を照らす照明手段を用いて前記対象物に対する照度を同一に設定するとともに、撮影背景仕様を同一に設定し、前記推定モデルによる推定結果と推定モデルの推定に対応する実測結果との差異に基づいて、前記撮影背景仕様のうち背景面の表面粗さを変更して、前記表面粗さを前記差異をより小さくさせる粗さに設定することを特徴とする画像データの取得方法。
- 前記収容部に内部に設置された回転台に前記対象物を載置して、前記対象物を前記回転台によって回転させながら前記画像データを撮影することで、それぞれの1つの前記対象物に対して周方向位置を異ならせた複数の前記画像データを取得する請求項1~4のいずれかに記載の画像データの取得方法。
- 前記撮影装置の全体を前記収容部の内部に配置し、平面視で前記対象物を中心にして前記撮影装置を回転させながら前記画像データを撮影することで、それぞれの1つの前記対象物に対して周方向位置を異ならせた複数の前記画像データを取得する請求項1~5のいずれかに記載の画像データの取得方法。
- 推定モデルの生成および使用に用いられる画像データを撮影して取得する撮影装置と、遮光性を有する収容部と、前記収容部の内部を照らす照明手段と、前記画像データが記憶されて前記画像データを用いたデータ処理を行う演算部とを有し、
それぞれの前記画像データが前記撮影装置により取得されるそれぞれの撮影工程では、それぞれの前記画像データの対象物および前記撮影装置の少なくとも画像取得部が前記収容部の内部に配置されて、前記収容部の外部の光を遮った状態で、前記照明手段によって前記対象物に対する照度が同一に設定されるとともに、撮影背景仕様が同一に設定され、前記対象物が透明性を有する容器に収容された、規定の混合率で土砂を液体に混合させた混合液であり、前記混合液が収容された前記容器が統一した条件で加振された後に所定位置に載置されて規定時間経過時にそれぞれの前記画像データが前記容器の側方から撮影して取得されることを特徴とする土砂の粒度分布を推定するための画像データの取得システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021083227A JP7281500B2 (ja) | 2021-05-17 | 2021-05-17 | 画像データの取得方法および取得システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021083227A JP7281500B2 (ja) | 2021-05-17 | 2021-05-17 | 画像データの取得方法および取得システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022176681A JP2022176681A (ja) | 2022-11-30 |
| JP7281500B2 true JP7281500B2 (ja) | 2023-05-25 |
Family
ID=84234158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021083227A Active JP7281500B2 (ja) | 2021-05-17 | 2021-05-17 | 画像データの取得方法および取得システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7281500B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003195394A (ja) | 2001-12-25 | 2003-07-09 | Raax Co Ltd | 外周画像記録装置 |
| JP2005257492A (ja) | 2004-03-12 | 2005-09-22 | Hitachi Industries Co Ltd | 容器内異物検出装置 |
| JP2013088116A (ja) | 2011-10-13 | 2013-05-13 | Yonden Gijutsu Consultant:Kk | ボーリングコアの電子化システム |
| JP2016085117A (ja) | 2014-10-27 | 2016-05-19 | 国立研究開発法人農業・食品産業技術総合研究機構 | デジタルカメラ画像データを用いた鮮度判定方法 |
| JP2017187882A (ja) | 2016-04-04 | 2017-10-12 | セイコーエプソン株式会社 | 画像処理に用いられるコンピュータープログラム |
| JP2019120501A (ja) | 2017-12-28 | 2019-07-22 | 日本ビジュアルサイエンス株式会社 | 撮影システム及び画像処理装置並びに画像処理方法 |
| WO2019171121A1 (en) | 2018-03-05 | 2019-09-12 | Omron Corporation | Method, device, system and program for setting lighting condition and storage medium |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10132736B2 (en) * | 2012-05-24 | 2018-11-20 | Abbvie Inc. | Methods for inspection of protein particles in a liquid beneficial agent |
-
2021
- 2021-05-17 JP JP2021083227A patent/JP7281500B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003195394A (ja) | 2001-12-25 | 2003-07-09 | Raax Co Ltd | 外周画像記録装置 |
| JP2005257492A (ja) | 2004-03-12 | 2005-09-22 | Hitachi Industries Co Ltd | 容器内異物検出装置 |
| JP2013088116A (ja) | 2011-10-13 | 2013-05-13 | Yonden Gijutsu Consultant:Kk | ボーリングコアの電子化システム |
| JP2016085117A (ja) | 2014-10-27 | 2016-05-19 | 国立研究開発法人農業・食品産業技術総合研究機構 | デジタルカメラ画像データを用いた鮮度判定方法 |
| JP2017187882A (ja) | 2016-04-04 | 2017-10-12 | セイコーエプソン株式会社 | 画像処理に用いられるコンピュータープログラム |
| JP2019120501A (ja) | 2017-12-28 | 2019-07-22 | 日本ビジュアルサイエンス株式会社 | 撮影システム及び画像処理装置並びに画像処理方法 |
| WO2019171121A1 (en) | 2018-03-05 | 2019-09-12 | Omron Corporation | Method, device, system and program for setting lighting condition and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022176681A (ja) | 2022-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Paixão et al. | Photogrammetry for digital reconstruction of railway ballast particles–A cost-efficient method | |
| US7782451B2 (en) | Device for and method of inspecting surface condition having different curvatures | |
| JP2023140336A (ja) | コーティング欠陥のためコーティング表面を検査する方法 | |
| US20160171748A1 (en) | Method and Apparatus for Digitizing the Appearance of A Real Material | |
| CN1808056A (zh) | 利用二维检测器测量薄膜特性的装置及测量方法 | |
| Dellepiane et al. | High Quality PTM Acquisition: Reflection Transformation Imaging for Large Objects. | |
| JP2005128535A (ja) | カメラおよびストロボに使用される支持装置および支持方法 | |
| US20200049631A1 (en) | System and Method to Automatically Generate Valuable Cutting Plans for a Rough Gemstone | |
| Pauly et al. | Lessons from a space lab: An image acquisition perspective | |
| JP6392922B1 (ja) | 検査システムの検査対象外となる領域を算出する装置、および検査対象外となる領域を算出する方法 | |
| JP7281500B2 (ja) | 画像データの取得方法および取得システム | |
| Sebar et al. | A low-cost automatic acquisition system for photogrammetry | |
| JP2024119748A (ja) | 自動視覚検査システムの柔軟で直感的な配置システム | |
| JP2021521495A (ja) | 商品情報収集装置 | |
| Havran et al. | Lightdrum—Portable light stage for accurate BTF measurement on site | |
| CN114441450A (zh) | 一种多金属结核典型特征模拟分析装置及方法 | |
| CN109813726A (zh) | 一种用于线路板信息集成的装置 | |
| JP2025081514A (ja) | 自動外観検査ステーションのためのオフライントラブルシューティング及び開発 | |
| CN114152410A (zh) | 一种视觉光源检测系统及检测方法 | |
| US20240319107A1 (en) | Automated Photography and Inspection Station | |
| JP2010223933A (ja) | 色空間判別条件生成装置及びこれを使用した画像検査装置 | |
| Suchan et al. | Controlled photogrammetry system for determination of volume and surface features in soils | |
| CN104865047B (zh) | 复合式物距的光学检测装置 | |
| Sitnik et al. | Integrated shape, color, and reflectivity measurement method for 3D digitization of cultural heritage objects | |
| CN114682524B (zh) | 一种信号校正方法、装置及分选设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220802 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230203 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230502 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230515 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7281500 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |