JP7146491B2 - 抽出装置、制御システム、通信システム、学習モデル、情報処理装置、コンピュータプログラム、および、記憶媒体 - Google Patents
抽出装置、制御システム、通信システム、学習モデル、情報処理装置、コンピュータプログラム、および、記憶媒体 Download PDFInfo
- Publication number
- JP7146491B2 JP7146491B2 JP2018127822A JP2018127822A JP7146491B2 JP 7146491 B2 JP7146491 B2 JP 7146491B2 JP 2018127822 A JP2018127822 A JP 2018127822A JP 2018127822 A JP2018127822 A JP 2018127822A JP 7146491 B2 JP7146491 B2 JP 7146491B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- extraction
- vehicle
- learning model
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
Description
(第1実施形態)
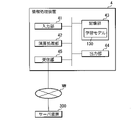
図1は第1実施形態に係る抽出装置1を説明する模式的説明図である。第1実施形態に係る抽出装置1は、例えば人力駆動車100に搭載されるコンピュータであり、人力駆動車100の周囲環境についての検出結果から、人力駆動車100の走行環境に関する情報を学習アルゴリズムによって抽出する。本実施形態において、人力駆動車100は、走行のための原動力に関して、少なくとも部分的に人力を用いる車両であり、人力を電動補助する車両を含む。内燃機関または電動機のみを原動力に用いる車両は、人力駆動車100からは除外される。本実施形態において、人力駆動車100は自転車である。人力駆動車100は、操舵装置Hを備える。操舵装置Hの一例は、ハンドルバーである。抽出装置1は、人力駆動車100に設けられる専用端末であってもよく、人力駆動車100の搭乗者が携帯するスマートフォンなどの携帯端末であってもよい。
第2実施形態では、抽出装置1による抽出結果に基づき、人力駆動車100のコンポーネントCを制御する制御システムについて説明する。
第3実施形態では、抽出装置1による抽出結果を外部サーバへ送信する通信システムについて説明する。
第4実施形態では、人力駆動車100の周囲環境についての検出結果を、学習モデルへ入力し、検出結果に関する推定結果を学習モデルから取得する演算処理部42を備える情報処理装置4について説明する。より具体的には、情報処理装置4が、サーバ装置300から学習モデル310をダウンロードすることよって、学習モデル130を更新する形態について説明する。サーバ装置300の構成は、第3実施形態と同様であるから、その説明を省略することとする。
11 入力部
12 演算処理部
13 記憶部
14 出力部
130 学習モデル
Claims (21)
- 人力駆動車の周囲環境についての検出結果から、前記人力駆動車の走行環境に関する情報として、前記人力駆動車の進行方向に沿って延び、設定高さよりも低い段差に関する情報を、学習アルゴリズムによって抽出する抽出部を備える抽出装置。
- 前記学習アルゴリズムは、深層学習アルゴリズムを含む、請求項1に記載の抽出装置。
- 前記検出結果は、前記人力駆動車の周囲の画像を含む、請求項1または2に記載の抽出装置。
- 前記走行環境に関する情報は、障害物に関する情報を含む、請求項1~3のいずれか一項に記載の抽出装置。
- 請求項1~4のいずれか一項に記載の抽出装置と、
前記抽出装置の抽出結果に基づいて、前記人力駆動車のコンポーネントを制御する制御装置と、を備える制御システム。 - 前記コンポーネントは、報知装置を含む、請求項5に記載の制御システム。
- 人力駆動車の周囲環境についての検出結果から、前記人力駆動車の走行環境に関する情報として、前記人力駆動車の進行方向に沿って延びる段差に関する情報を、学習アルゴリズムによって抽出する抽出部を備える抽出装置と、
前記抽出装置の抽出結果に基づいて、照明装置を含む前記人力駆動車のコンポーネントを制御する制御装置と
を備え、
前記制御装置は、前記段差への前記人力駆動車の進入角度と設定角度との比較結果に応じて、異なる照明態様にて前記段差を照明すべく、前記照明装置を制御する
制御システム。 - 人力駆動車の周囲環境についての検出結果から、前記人力駆動車の走行環境に関する情報として、前記人力駆動車の進行方向に沿って延びる段差に関する情報を、学習アルゴリズムによって抽出する抽出部を備える抽出装置と、
前記抽出装置の抽出結果に基づいて、操舵装置の支援装置を含む前記人力駆動車のコンポーネントを制御する制御装置と
を備え、
前記制御装置は、前記段差が前記人力駆動車の進行方向右側にある場合、進行方向を右方向に曲げ、前記段差が前記人力駆動車の進行方向左側にある場合、進行方向を左方向に曲げるように、前記操舵装置の支援装置を制御する
制御システム。 - 請求項1~4のいずれか一項に記載の抽出装置と、
外部装置と通信する通信部を含む通信装置と、を備え、
前記通信部は、前記抽出装置の抽出結果を前記外部装置へ送信する、通信システム。 - 前記通信装置は、位置情報を取得する位置情報取得部をさらに含み、
前記通信部は、前記位置情報取得部が取得した位置情報、および、前記抽出装置の抽出結果を外部装置へ送信する、請求項9に記載の通信システム。 - 前記外部装置は、前記通信装置からの前記位置情報、および、前記抽出結果から、地図に関する情報を生成する、請求項10に記載の通信システム。
- 前記通信装置は、前記外部装置から、他の人力駆動車の位置情報、および、他の人力駆動車における抽出結果を受信する、請求項10または11に記載の通信システム。
- 人力駆動車の周囲環境についての検出結果が入力される入力層と、
前記人力駆動車の進行方向に沿って延びる段差に関する情報を出力する出力層と、
前記周囲環境についての検出結果と前記段差に関する情報とを教師データに用いて、前記検出結果と前記段差に関する情報との関係を学習してある中間層と、を備え、
前記入力層に入力された前記周囲環境についての検出結果に基づき、前記中間層で演算し、前記人力駆動車の進行方向に沿って延びる段差に関する情報を前記出力層から出力する処理に用いられる学習モデル。 - 前記検出結果は、前記人力駆動車の周囲の画像を含む、請求項13に記載の学習モデル。
- 前記教師データは、前記段差を含まない検出結果および前記検出結果が前記段差を含まないことを示すラベルデータを含む、請求項13または14に記載の学習モデル。
- 前記教師データは、前記人力駆動車の走行中に検出される走行情報を含む、請求項13~15のいずれか一項に記載の学習モデル。
- 人力駆動車の周囲環境についての検出結果を、請求項13~16の何れか一項に記載の学習モデルへ入力し、前記検出結果に関する推定結果を前記学習モデルから取得する演算処理部を備える、情報処理装置。
- 人力駆動車の周囲環境についての検出結果に基づく追加学習によって更新された更新済学習モデルを受信する受信部、を備え、
前記更新済学習モデルへ更新する旨の選択を受け付けた場合に、前記学習モデルを前記更新済学習モデルに更新する、請求項17に記載の情報処理装置。 - 前記人力駆動車と前記学習モデルより出力される情報に基づき特定される段差との間の距離が設定距離未満であり、かつ、前記人力駆動車の前記段差への進入角度が設定角度未満である場合、警告情報を出力する出力部を備える、請求項17または18に記載の情報処理装置。
- コンピュータに、
人力駆動車の周囲環境についての検出結果を、請求項13~16の何れか一項に記載の学習モデルへ入力し、前記人力駆動車の走行環境に関する情報として、前記人力駆動車の進行方向に沿って延びる段差に関する情報を、前記学習モデルより取得する
処理を実行させるためのコンピュータプログラム。 - 請求項20に記載のコンピュータプログラムが記憶される記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018127822A JP7146491B2 (ja) | 2018-07-04 | 2018-07-04 | 抽出装置、制御システム、通信システム、学習モデル、情報処理装置、コンピュータプログラム、および、記憶媒体 |
| DE102019117753.7A DE102019117753A1 (de) | 2018-07-04 | 2019-07-02 | Extraktionsvorrichtung, steuersystem, kommunikationssystem, lernmodell, informationsverarbeitungsapparat,computerprogramm und aufzeichnungsmedium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018127822A JP7146491B2 (ja) | 2018-07-04 | 2018-07-04 | 抽出装置、制御システム、通信システム、学習モデル、情報処理装置、コンピュータプログラム、および、記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020006759A JP2020006759A (ja) | 2020-01-16 |
| JP7146491B2 true JP7146491B2 (ja) | 2022-10-04 |
Family
ID=68943954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018127822A Active JP7146491B2 (ja) | 2018-07-04 | 2018-07-04 | 抽出装置、制御システム、通信システム、学習モデル、情報処理装置、コンピュータプログラム、および、記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7146491B2 (ja) |
| DE (1) | DE102019117753A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006113836A (ja) | 2004-10-15 | 2006-04-27 | Fuji Heavy Ind Ltd | 道路情報提供システム |
| JP2006154961A (ja) | 2004-11-25 | 2006-06-15 | Sumitomo Electric Ind Ltd | 交通音識別装置、コンピュータを交通音識別装置として機能させるための交通音判定プログラム、記録媒体および交通音判定方法 |
| JP2007148835A (ja) | 2005-11-28 | 2007-06-14 | Fujitsu Ten Ltd | 物体判別装置、報知制御装置、物体判別方法および物体判別プログラム |
| JP2008204102A (ja) | 2007-02-19 | 2008-09-04 | Yokohama National Univ | 画像処理システム |
| JP2012232672A (ja) | 2011-05-02 | 2012-11-29 | Mitsubishi Motors Corp | 段差警報システム |
| JP2015014819A (ja) | 2013-07-03 | 2015-01-22 | クラリオン株式会社 | 接近物検出システム、及び車両 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1134731A (ja) * | 1994-12-15 | 1999-02-09 | Masatoshi Shintani | 移動体照明灯障害物照射装置 |
| JP2006123569A (ja) | 2004-10-26 | 2006-05-18 | Nissan Motor Co Ltd | 車両用障害物報知装置、および方法 |
| JP6873724B2 (ja) | 2017-02-08 | 2021-05-19 | オリエンタル白石株式会社 | 排土装置 |
-
2018
- 2018-07-04 JP JP2018127822A patent/JP7146491B2/ja active Active
-
2019
- 2019-07-02 DE DE102019117753.7A patent/DE102019117753A1/de active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006113836A (ja) | 2004-10-15 | 2006-04-27 | Fuji Heavy Ind Ltd | 道路情報提供システム |
| JP2006154961A (ja) | 2004-11-25 | 2006-06-15 | Sumitomo Electric Ind Ltd | 交通音識別装置、コンピュータを交通音識別装置として機能させるための交通音判定プログラム、記録媒体および交通音判定方法 |
| JP2007148835A (ja) | 2005-11-28 | 2007-06-14 | Fujitsu Ten Ltd | 物体判別装置、報知制御装置、物体判別方法および物体判別プログラム |
| JP2008204102A (ja) | 2007-02-19 | 2008-09-04 | Yokohama National Univ | 画像処理システム |
| JP2012232672A (ja) | 2011-05-02 | 2012-11-29 | Mitsubishi Motors Corp | 段差警報システム |
| JP2015014819A (ja) | 2013-07-03 | 2015-01-22 | クラリオン株式会社 | 接近物検出システム、及び車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102019117753A1 (de) | 2020-01-09 |
| JP2020006759A (ja) | 2020-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108571974B (zh) | 使用摄像机的车辆定位 | |
| JP6359825B2 (ja) | 車両のための装置及び方法、及び、その方法を実行するための命令を含む記憶媒体 | |
| US9308917B2 (en) | Driver assistance apparatus capable of performing distance detection and vehicle including the same | |
| US20200307616A1 (en) | Methods and systems for driver assistance | |
| US10807595B2 (en) | U-turn assistance based on difficulty in maneuvering | |
| CN111095291A (zh) | 由自动驾驶车辆实时检测车道和边界 | |
| EP3650285A1 (en) | Parking assistance method and parking assistance device | |
| CN109323708B (zh) | 电子装置及其控制方法 | |
| US20190163993A1 (en) | Method and apparatus for maintaining a lane | |
| CN112912294A (zh) | 车辆驾驶控制设备和由该车辆驾驶控制设备执行的校准方法 | |
| JP6678605B2 (ja) | 情報処理装置、情報処理方法、および情報処理プログラム | |
| EP3588007B1 (en) | Information processing method and information processing device | |
| CN113205088B (zh) | 障碍物图像展示方法、电子设备和计算机可读介质 | |
| JP2011230549A (ja) | 駐車支援装置 | |
| CN112092809A (zh) | 一种辅助倒车方法、装置、系统及车辆 | |
| US20210150904A1 (en) | Driver notification system | |
| CN113673403A (zh) | 行驶环境检测方法、系统、装置、计算机设备、计算机可读存储介质及汽车 | |
| US10864856B2 (en) | Mobile body surroundings display method and mobile body surroundings display apparatus | |
| JP7146491B2 (ja) | 抽出装置、制御システム、通信システム、学習モデル、情報処理装置、コンピュータプログラム、および、記憶媒体 | |
| WO2008038376A1 (fr) | Dispositif de reconnaissance de signal, procédé de reconnaissance de signal, programme de reconnaissance de signal, et support d'enregistrement | |
| JP7337617B2 (ja) | 推定装置、推定方法及びプログラム | |
| JP2007241470A (ja) | 車両用地図データ更新装置 | |
| JP6953088B2 (ja) | 電子装置および駐車支援方法 | |
| CN108428356B (zh) | 一种基于流体密度场的路况图展示及辅助驾驶应用方法 | |
| CN112970029A (zh) | 用于自主机器应用中传感器视盲检测的深度神经网络处理 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180709 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220119 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220803 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220803 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220810 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220816 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220906 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220921 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7146491 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |