以下、この技術的思想の実施の形態について図面を参照しながら詳細に説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰り返さない。本開示において示される1以上の実施形態において、各実施形態が含む要素を互いに組み合わせることができ、かつ、当該組み合わせられた結果物も本開示が示す実施形態の一部をなすものとする。
[HMDシステムの構成]
図1を参照して、HMD(Head-Mounted Device)システム100の構成について説明する。図1は、本実施の形態に従うHMDシステム100の構成の概略を表す図である。HMDシステム100は、家庭用のシステムとしてあるいは業務用のシステムとして提供される。
HMDシステム100は、サーバ600と、HMDセット110A,110B,110C,110Dと、外部機器700と、ネットワーク2とを含む。HMDセット110A,110B,110C,110Dの各々は、ネットワーク2を介してサーバ600や外部機器700と通信可能に構成される。以下、HMDセット110A,110B,110C,110Dを総称して、HMDセット110とも言う。HMDシステム100を構成するHMDセット110の数は、4つに限られず、3つ以下でも、5つ以上でもよい。HMDセット110は、HMD120と、コンピュータ200と、HMDセンサ410と、ディスプレイ430と、コントローラ300とを備える。HMD120は、モニタ130と、注視センサ140と、第1カメラ150と、第2カメラ160と、マイク170と、スピーカ180とを含む。コントローラ300は、モーションセンサ420を含み得る。
ある局面において、コンピュータ200は、インターネットその他のネットワーク2に接続可能であり、ネットワーク2に接続されているサーバ600その他のコンピュータと通信可能である。その他のコンピュータとしては、例えば、他のHMDセット110のコンピュータや外部機器700が挙げられる。別の局面において、HMD120は、HMDセンサ410の代わりに、センサ190を含み得る。
HMD120は、ユーザ5の頭部に装着され、動作中に仮想空間をユーザ5に提供し得る。より具体的には、HMD120は、右目用の画像および左目用の画像をモニタ130にそれぞれ表示する。ユーザ5の各目がそれぞれの画像を視認すると、ユーザ5は、両目の視差に基づき当該画像を3次元画像として認識し得る。HMD120は、モニタを備える所謂ヘッドマウントディスプレイと、スマートフォンその他のモニタを有する端末を装着可能なヘッドマウント機器のいずれをも含み得る。
モニタ130は、例えば、非透過型の表示装置として実現される。ある局面において、モニタ130は、ユーザ5の両目の前方に位置するようにHMD120の本体に配置されている。したがって、ユーザ5は、モニタ130に表示される3次元画像を視認すると、仮想空間に没入することができる。ある局面において、仮想空間は、例えば、背景、ユーザ5が操作可能なオブジェクト、ユーザ5が選択可能なメニューの画像を含む。ある局面において、モニタ130は、所謂スマートフォンその他の情報表示端末が備える液晶モニタまたは有機EL(Electro Luminescence)モニタとして実現され得る。
別の局面において、モニタ130は、透過型の表示装置として実現され得る。この場合、HMD120は、図1に示されるようにユーザ5の目を覆う密閉型ではなく、メガネ型のような開放型であり得る。透過型のモニタ130は、その透過率を調整することにより、一時的に非透過型の表示装置として構成可能であってもよい。モニタ130は、仮想空間を構成する画像の一部と、現実空間とを同時に表示する構成を含んでいてもよい。例えば、モニタ130は、HMD120に搭載されたカメラで撮影した現実空間の画像を表示してもよいし、一部の透過率を高く設定することにより現実空間を視認可能にしてもよい。
ある局面において、モニタ130は、右目用の画像を表示するためのサブモニタと、左目用の画像を表示するためのサブモニタとを含み得る。別の局面において、モニタ130は、右目用の画像と左目用の画像とを一体として表示する構成であってもよい。この場合、モニタ130は、高速シャッタを含む。高速シャッタは、画像がいずれか一方の目にのみ認識されるように、右目用の画像と左目用の画像とを交互に表示可能に作動する。
ある局面において、HMD120は、図示せぬ複数の光源を含む。各光源は例えば、赤外線を発するLED(Light Emitting Diode)により実現される。HMDセンサ410は、HMD120の動きを検出するためのポジショントラッキング機能を有する。より具体的には、HMDセンサ410は、HMD120が発する複数の赤外線を読み取り、現実空間内におけるHMD120の位置および傾きを検出する。
別の局面において、HMDセンサ410は、カメラにより実現されてもよい。この場合、HMDセンサ410は、カメラから出力されるHMD120の画像情報を用いて、画像解析処理を実行することにより、HMD120の位置および傾きを検出することができる。
別の局面において、HMD120は、位置検出器として、HMDセンサ410の代わりに、あるいはHMDセンサ410に加えてセンサ190を備えてもよい。HMD120は、センサ190を用いて、HMD120自身の位置および傾きを検出し得る。例えば、センサ190が角速度センサ、地磁気センサ、あるいは加速度センサである場合、HMD120は、HMDセンサ410の代わりに、これらの各センサのいずれかを用いて、自身の位置および傾きを検出し得る。一例として、センサ190が角速度センサである場合、角速度センサは、現実空間におけるHMD120の3軸周りの角速度を経時的に検出する。HMD120は、各角速度に基づいて、HMD120の3軸周りの角度の時間的変化を算出し、さらに、角度の時間的変化に基づいて、HMD120の傾きを算出する。
注視センサ140は、ユーザ5の右目および左目の視線が向けられる方向を検出する。つまり、注視センサ140は、ユーザ5の視線を検出する。視線の方向の検出は、例えば、公知のアイトラッキング機能によって実現される。注視センサ140は、当該アイトラッキング機能を有するセンサにより実現される。ある局面において、注視センサ140は、右目用のセンサおよび左目用のセンサを含むことが好ましい。注視センサ140は、例えば、ユーザ5の右目および左目に赤外光を照射するとともに、照射光に対する角膜および虹彩からの反射光を受けることにより各眼球の回転角を検出するセンサであってもよい。注視センサ140は、検出した各回転角に基づいて、ユーザ5の視線を検知することができる。
第1カメラ150は、ユーザ5の顔の下部を撮影する。より具体的には、第1カメラ150は、ユーザ5の鼻および口などを撮影する。第2カメラ160は、ユーザ5の目および眉などを撮影する。HMD120のユーザ5側の筐体をHMD120の内側、HMD120のユーザ5とは逆側の筐体をHMD120の外側と定義する。ある局面において、第1カメラ150は、HMD120の外側に配置され、第2カメラ160は、HMD120の内側に配置され得る。第1カメラ150および第2カメラ160が生成した画像は、コンピュータ200に入力される。別の局面において、第1カメラ150と第2カメラ160とを1台のカメラとして実現し、この1台のカメラでユーザ5の顔を撮影するようにしてもよい。
マイク170は、ユーザ5の発話を音声信号(電気信号)に変換してコンピュータ200に出力する。スピーカ180は、音声信号を音声に変換してユーザ5に出力する。別の局面において、HMD120は、スピーカ180に替えてイヤホンを含み得る。
コントローラ300は、有線または無線によりコンピュータ200に接続されている。コントローラ300は、ユーザ5からコンピュータ200への命令の入力を受け付ける。ある局面において、コントローラ300は、ユーザ5によって把持可能に構成される。別の局面において、コントローラ300は、ユーザ5の身体あるいは衣類の一部に装着可能に構成される。さらに別の局面において、コントローラ300は、コンピュータ200から送信される信号に基づいて、振動、音、光のうちの少なくともいずれかを出力するように構成されてもよい。さらに別の局面において、コントローラ300は、ユーザ5から、仮想空間に配置されるオブジェクトの位置や動きを制御するための操作を受け付ける。
ある局面において、コントローラ300は、複数の光源を含む。各光源は例えば、赤外線を発するLEDにより実現される。HMDセンサ410は、ポジショントラッキング機能を有する。この場合、HMDセンサ410は、コントローラ300が発する複数の赤外線を読み取り、現実空間内におけるコントローラ300の位置および傾きを検出する。別の局面において、HMDセンサ410は、カメラにより実現されてもよい。この場合、HMDセンサ410は、カメラから出力されるコントローラ300の画像情報を用いて、画像解析処理を実行することにより、コントローラ300の位置および傾きを検出することができる。
モーションセンサ420は、ある局面において、ユーザ5の手に取り付けられて、ユーザ5の手の動きを検出する。例えば、モーションセンサ420は、手の回転速度、回転数等を検出する。検出された信号は、コンピュータ200に送られる。モーションセンサ420は、例えば、コントローラ300に設けられている。ある局面において、モーションセンサ420は、例えば、ユーザ5に把持可能に構成されたコントローラ300に設けられている。別の局面において、現実空間における安全のため、コントローラ300は、手袋型のようにユーザ5の手に装着されることにより容易に飛んで行かないものに装着される。さらに別の局面において、ユーザ5に装着されないセンサがユーザ5の手の動きを検出してもよい。例えば、ユーザ5を撮影するカメラの信号が、ユーザ5の動作を表わす信号として、コンピュータ200に入力されてもよい。モーションセンサ420とコンピュータ200とは、一例として、無線により互いに接続される。無線の場合、通信形態は特に限られず、例えば、Bluetooth(登録商標)その他の公知の通信手法が用いられる。
ディスプレイ430は、モニタ130に表示されている画像と同様の画像を表示する。これにより、HMD120を装着しているユーザ5以外のユーザにも当該ユーザ5と同様の画像を視聴させることができる。ディスプレイ430に表示される画像は、3次元画像である必要はなく、右目用の画像や左目用の画像であってもよい。ディスプレイ430としては、例えば、液晶ディスプレイや有機ELモニタなどが挙げられる。
サーバ600は、コンピュータ200にプログラムを送信し得る。別の局面において、サーバ600は、他のユーザによって使用されるHMD120に仮想現実を提供するための他のコンピュータ200と通信し得る。例えば、アミューズメント施設において、複数のユーザが参加型のゲームを行なう場合、各コンピュータ200は、各ユーザの動作に基づく信号をサーバ600を介して他のコンピュータ200と通信して、同じ仮想空間において複数のユーザが共通のゲームを楽しむことを可能にする。各コンピュータ200は、各ユーザの動作に基づく信号をサーバ600を介さずに他のコンピュータ200と通信するようにしてもよい。
外部機器700は、コンピュータ200と通信可能な機器であればどのような機器であってもよい。外部機器700は、例えば、ネットワーク2を介してコンピュータ200と通信可能な機器であってもよいし、近距離無線通信や有線接続によりコンピュータ200と直接通信可能な機器であってもよい。外部機器700としては、例えば、スマートデバイス、PC(Personal Computer)、及びコンピュータ200の周辺機器などが挙げられるが、これらに限定されるものではない。
[コンピュータのハードウェア構成]
図2を参照して、本実施の形態に係るコンピュータ200について説明する。図2は、本実施の形態に従うコンピュータ200のハードウェア構成の一例を表すブロック図である。コンピュータ200は、主たる構成要素として、プロセッサ210と、メモリ220と、ストレージ230と、入出力インターフェイス240と、通信インターフェイス250とを備える。各構成要素は、それぞれ、バス260に接続されている。
プロセッサ210は、コンピュータ200に与えられる信号に基づいて、あるいは、予め定められた条件が成立したことに基づいて、メモリ220またはストレージ230に格納されているプログラムに含まれる一連の命令を実行する。ある局面において、プロセッサ210は、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)、MPU(Micro Processor Unit)、FPGA(Field-Programmable Gate Array)その他のデバイスとして実現される。
メモリ220は、プログラムおよびデータを一時的に保存する。プログラムは、例えば、ストレージ230からロードされる。データは、コンピュータ200に入力されたデータと、プロセッサ210によって生成されたデータとを含む。ある局面において、メモリ220は、RAM(Random Access Memory)その他の揮発メモリとして実現される。
ストレージ230は、プログラムおよびデータを永続的に保持する。ストレージ230は、例えば、ROM(Read-Only Memory)、ハードディスク装置、フラッシュメモリ、その他の不揮発記憶装置として実現される。ストレージ230に格納されるプログラムは、HMDシステム100において仮想空間を提供するためのプログラム、シミュレーションプログラム、ゲームプログラム、ユーザ認証プログラム、他のコンピュータ200との通信を実現するためのプログラムを含む。ストレージ230に格納されるデータは、仮想空間を規定するためのデータおよびオブジェクト等を含む。
別の局面において、ストレージ230は、メモリカードのように着脱可能な記憶装置として実現されてもよい。さらに別の局面において、コンピュータ200に内蔵されたストレージ230の代わりに、外部の記憶装置に保存されているプログラムおよびデータを使用する構成が使用されてもよい。このような構成によれば、例えば、アミューズメント施設のように複数のHMDシステム100が使用される場面において、プログラムやデータの更新を一括して行なうことが可能になる。
入出力インターフェイス240は、HMD120、HMDセンサ410、モーションセンサ420およびディスプレイ430との間で信号を通信する。HMD120に含まれるモニタ130,注視センサ140,第1カメラ150,第2カメラ160,マイク170およびスピーカ180は、HMD120の入出力インターフェイス240を介してコンピュータ200との通信を行ない得る。ある局面において、入出力インターフェイス240は、USB(Universal Serial Bus)、DVI(Digital Visual Interface)、HDMI(登録商標)(High-Definition Multimedia Interface)その他の端子を用いて実現される。入出力インターフェイス240は上述のものに限られない。
ある局面において、入出力インターフェイス240は、さらに、コントローラ300と通信し得る。例えば、入出力インターフェイス240は、コントローラ300およびモーションセンサ420から出力された信号の入力を受ける。別の局面において、入出力インターフェイス240は、プロセッサ210から出力された命令を、コントローラ300に送る。当該命令は、振動、音声出力、発光等をコントローラ300に指示する。コントローラ300は、当該命令を受信すると、その命令に応じて、振動、音声出力または発光のいずれかを実行する。
通信インターフェイス250は、ネットワーク2に接続されて、ネットワーク2に接続されている他のコンピュータ(例えば、サーバ600)と通信する。ある局面において、通信インターフェイス250は、例えば、LAN(Local Area Network)その他の有線通信インターフェイス、あるいは、WiFi(Wireless Fidelity)、Bluetooth(登録商標)、NFC(Near Field Communication)その他の無線通信インターフェイスとして実現される。通信インターフェイス250は上述のものに限られない。
ある局面において、プロセッサ210は、ストレージ230にアクセスし、ストレージ230に格納されている1つ以上のプログラムをメモリ220にロードし、当該プログラムに含まれる一連の命令を実行する。当該1つ以上のプログラムは、コンピュータ200のオペレーティングシステム、仮想空間を提供するためのアプリケーションプログラム、仮想空間で実行可能なゲームソフトウェア等を含み得る。プロセッサ210は、入出力インターフェイス240を介して、仮想空間を提供するための信号をHMD120に送る。HMD120は、その信号に基づいてモニタ130に映像を表示する。
図2に示される例では、コンピュータ200は、HMD120の外部に設けられる構成が示されているが、別の局面において、コンピュータ200は、HMD120に内蔵されてもよい。一例として、モニタ130を含む携帯型の情報通信端末(例えば、スマートフォン)がコンピュータ200として機能してもよい。
コンピュータ200は、複数のHMD120に共通して用いられる構成であってもよい。このような構成によれば、例えば、複数のユーザに同一の仮想空間を提供することもできるので、各ユーザは同一の仮想空間で他のユーザと同一のアプリケーションを楽しむことができる。
ある実施の形態において、HMDシステム100では、現実空間における座標系である実座標系が予め設定されている。実座標系は、現実空間における鉛直方向、鉛直方向に直交する水平方向、並びに、鉛直方向および水平方向の双方に直交する前後方向にそれぞれ平行な、3つの基準方向(軸)を有する。実座標系における水平方向、鉛直方向(上下方向)、および前後方向は、それぞれ、x軸、y軸、z軸と規定される。より具体的には、実座標系において、x軸は現実空間の水平方向に平行である。y軸は、現実空間の鉛直方向に平行である。z軸は現実空間の前後方向に平行である。
ある局面において、HMDセンサ410は、赤外線センサを含む。赤外線センサが、HMD120の各光源から発せられた赤外線をそれぞれ検出すると、HMD120の存在を検出する。HMDセンサ410は、さらに、各点の値(実座標系における各座標値)に基づいて、HMD120を装着したユーザ5の動きに応じた、現実空間内におけるHMD120の位置および傾き(向き)を検出する。より詳しくは、HMDセンサ410は、経時的に検出された各値を用いて、HMD120の位置および傾きの時間的変化を検出できる。
HMDセンサ410によって検出されたHMD120の各傾きは、実座標系におけるHMD120の3軸周りの各傾きに相当する。HMDセンサ410は、実座標系におけるH MD120の傾きに基づき、uvw視野座標系をHMD120に設定する。HMD120に設定されるuvw視野座標系は、HMD120を装着したユーザ5が仮想空間において物体を見る際の視点座標系に対応する。
[uvw視野座標系]
図3を参照して、uvw視野座標系について説明する。図3は、ある実施の形態に従うHMD120に設定されるuvw視野座標系を概念的に表す図である。HMDセンサ410は、HMD120の起動時に、実座標系におけるHMD120の位置および傾きを検出する。プロセッサ210は、検出された値に基づいて、uvw視野座標系をHMD120に設定する。
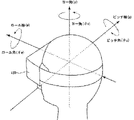
図3に示されるように、HMD120は、HMD120を装着したユーザ5の頭部を中心(原点)とした3次元のuvw視野座標系を設定する。より具体的には、HMD120は、実座標系を規定する水平方向、鉛直方向、および前後方向(x軸、y軸、z軸)を、実座標系内においてHMD120の各軸周りの傾きだけ各軸周りにそれぞれ傾けることによって新たに得られる3つの方向を、HMD120におけるuvw視野座標系のピッチ軸(u軸)、ヨー軸(v軸)、およびロール軸(w軸)として設定する。
ある局面において、HMD120を装着したユーザ5が直立し、かつ、正面を視認している場合、プロセッサ210は、実座標系に平行なuvw視野座標系をHMD120に設定する。この場合、実座標系における水平方向(x軸)、鉛直方向(y軸)、および前後方向(z軸)は、HMD120におけるuvw視野座標系のピッチ軸(u軸)、ヨー軸(v軸)、およびロール軸(w軸)に一致する。
uvw視野座標系がHMD120に設定された後、HMDセンサ410は、HMD120の動きに基づいて、設定されたuvw視野座標系におけるHMD120の傾きを検出できる。この場合、HMDセンサ410は、HMD120の傾きとして、uvw視野座標系におけるHMD120のピッチ角(θu)、ヨー角(θv)、およびロール角(θw)をそれぞれ検出する。ピッチ角(θu)は、uvw視野座標系におけるピッチ軸周りのHMD120の傾き角度を表す。ヨー角(θv)は、uvw視野座標系におけるヨー軸周りのHMD120の傾き角度を表す。ロール角(θw)は、uvw視野座標系におけるロール軸周りのHMD120の傾き角度を表す。
HMDセンサ410は、検出されたHMD120の傾きに基づいて、HMD120が動いた後のHMD120におけるuvw視野座標系を、HMD120に設定する。HMD120と、HMD120のuvw視野座標系との関係は、HMD120の位置および傾きに関わらず、常に一定である。HMD120の位置および傾きが変わると、当該位置および傾きの変化に連動して、実座標系におけるHMD120のuvw視野座標系の位置および傾きが変化する。
ある局面において、HMDセンサ410は、赤外線センサからの出力に基づいて取得される赤外線の光強度および複数の点間の相対的な位置関係(例えば、各点間の距離など)に基づいて、HMD120の現実空間内における位置を、HMDセンサ410に対する相対位置として特定してもよい。プロセッサ210は、特定された相対位置に基づいて、現実空間内(実座標系)におけるHMD120のuvw視野座標系の原点を決定してもよい。
[仮想空間]
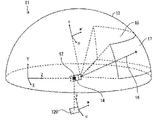
図4を参照して、仮想空間についてさらに説明する。図4は、ある実施の形態に従う仮想空間11を表現する一態様を概念的に表す図である。仮想空間11は、中心12の360度方向の全体を覆う全天球状の構造を有する。図4では、説明を複雑にしないために、仮想空間11のうちの上半分の天球が例示されている。仮想空間11では各メッシュが規定される。各メッシュの位置は、仮想空間11に規定されるグローバル座標系であるXYZ座標系における座標値として予め規定されている。コンピュータ200は、仮想空間11に展開可能なパノラマ画像13(静止画、動画等)を構成する各部分画像を、仮想空間11において対応する各メッシュにそれぞれ対応付ける。
ある局面において、仮想空間11では、中心12を原点とするXYZ座標系が規定される。XYZ座標系は、例えば、実座標系に平行である。XYZ座標系における水平方向、鉛直方向(上下方向)、および前後方向は、それぞれX軸、Y軸、Z軸として規定される。したがって、XYZ座標系のX軸(水平方向)が実座標系のx軸と平行であり、XYZ座標系のY軸(鉛直方向)が実座標系のy軸と平行であり、XYZ座標系のZ軸(前後方向)が実座標系のz軸と平行である。
HMD120の起動時、すなわちHMD120の初期状態において、仮想カメラ14が、仮想空間11の中心12に配置される。ある局面において、プロセッサ210は、仮想カメラ14が撮影する画像をHMD120のモニタ130に表示する。仮想カメラ14は、現実空間におけるHMD120の動きに連動して、仮想空間11を同様に移動する。これにより、現実空間におけるHMD120の位置および傾きの変化が、仮想空間11において同様に再現され得る。
仮想カメラ14には、HMD120の場合と同様に、uvw視野座標系が規定される。仮想空間11における仮想カメラ14のuvw視野座標系は、現実空間(実座標系)におけるHMD120のuvw視野座標系に連動するように規定されている。したがって、HMD120の傾きが変化すると、それに応じて、仮想カメラ14の傾きも変化する。仮想カメラ14は、HMD120を装着したユーザ5の現実空間における移動に連動して、仮想空間11において移動することもできる。
コンピュータ200のプロセッサ210は、仮想カメラ14の位置と傾き(基準視線16)とに基づいて、仮想空間11における視界領域15を規定する。視界領域15は、仮想空間11のうち、HMD120を装着したユーザ5が視認する領域に対応する。つまり、仮想カメラ14の位置は、仮想空間11におけるユーザ5の視点と言える。
注視センサ140によって検出されるユーザ5の視線は、ユーザ5が物体を視認する際の視点座標系における方向である。HMD120のuvw視野座標系は、ユーザ5がモニタ130を視認する際の視点座標系に等しい。仮想カメラ14のuvw視野座標系は、HMD120のuvw視野座標系に連動している。したがって、ある局面に従うHMDシステム100は、注視センサ140によって検出されたユーザ5の視線を、仮想カメラ14のuvw視野座標系におけるユーザ5の視線とみなすことができる。
[ユーザの視線]
図5を参照して、ユーザ5の視線の決定について説明する。図5は、ある実施の形態に従うHMD120を装着するユーザ5の頭部を上から表した図である。
ある局面において、注視センサ140は、ユーザ5の右目および左目の各視線を検出する。ある局面において、ユーザ5が近くを見ている場合、注視センサ140は、視線R1およびL1を検出する。別の局面において、ユーザ5が遠くを見ている場合、注視センサ140は、視線R2およびL2を検出する。この場合、ロール軸wに対して視線R2およびL2が成す角度は、ロール軸wに対して視線R1およびL1が成す角度よりも小さい。注視センサ140は、検出結果をコンピュータ200に送信する。
コンピュータ200が、視線の検出結果として、視線R1およびL1の検出値を注視センサ140から受信した場合には、その検出値に基づいて、視線R1およびL1の交点である注視点N1を特定する。一方、コンピュータ200は、視線R2およびL2の検出値を注視センサ140から受信した場合には、視線R2およびL2の交点を注視点として特定する。コンピュータ200は、特定した注視点N1の位置に基づき、ユーザ5の視線N0を特定する。コンピュータ200は、例えば、ユーザ5の右目Rと左目Lとを結ぶ直線の中点と、注視点N1とを通る直線の延びる方向を、視線N0として検出する。視線N0は、ユーザ5が両目により実際に視線を向けている方向である。視線N0は、視界領域15に対してユーザ5が実際に視線を向けている方向に相当する。
別の局面において、HMDシステム100は、テレビジョン放送受信チューナを備えてもよい。このような構成によれば、HMDシステム100は、仮想空間11においてテレビ番組を表示することができる。
さらに別の局面において、HMDシステム100は、インターネットに接続するための通信回路、あるいは、電話回線に接続するための通話機能を備えていてもよい。
[視界領域]
図6および図7を参照して、視界領域15について説明する。図6は、仮想空間11において視界領域15をX方向から見たYZ断面を表す図である。図7は、仮想空間11において視界領域15をY方向から見たXZ断面を表す図である。
図6に示されるように、YZ断面における視界領域15は、領域18を含む。領域18は、仮想カメラ14の位置と基準視線16と仮想空間11のYZ断面とによって定義される。プロセッサ210は、仮想空間における基準視線16を中心として極角αを含む範囲を、領域18として規定する。
図7に示されるように、XZ断面における視界領域15は、領域19を含む。領域19は、仮想カメラ14の位置と基準視線16と仮想空間11のXZ断面とによって定義される。プロセッサ210は、仮想空間11における基準視線16を中心とした方位角βを含む範囲を、領域19として規定する。極角αおよびβは、仮想カメラ14の位置と仮想カメラ14の傾き(向き)とに応じて定まる。
ある局面において、HMDシステム100は、コンピュータ200からの信号に基づいて、視界画像17をモニタ130に表示させることにより、ユーザ5に仮想空間11における視界を提供する。視界画像17は、パノラマ画像13のうち視界領域15に対応する部分に相当する画像である。ユーザ5が、頭に装着したHMD120を動かすと、その動きに連動して仮想カメラ14も動く。その結果、仮想空間11における視界領域15の位置が変化する。これにより、モニタ130に表示される視界画像17は、パノラマ画像13のうち、仮想空間11においてユーザ5が向いた方向の視界領域15に重畳する画像に更新される。ユーザ5は、仮想空間11における所望の方向を視認することができる。
このように、仮想カメラ14の傾きは仮想空間11におけるユーザ5の視線(基準視線16)に相当し、仮想カメラ14が配置される位置は、仮想空間11におけるユーザ5の視点に相当する。したがって、仮想カメラ14の位置または傾きを変更することにより、モニタ130に表示される画像が更新され、ユーザ5の視界が移動される。
ユーザ5は、HMD120を装着している間、現実世界を視認することなく、仮想空間11に展開されるパノラマ画像13のみを視認できる。そのため、HMDシステム100は、仮想空間11への高い没入感覚をユーザ5に与えることができる。
ある局面において、プロセッサ210は、HMD120を装着したユーザ5の現実空間における移動に連動して、仮想空間11において仮想カメラ14を移動し得る。この場合、プロセッサ210は、仮想空間11における仮想カメラ14の位置および傾きに基づいて、HMD120のモニタ130に投影される画像領域(視界領域15)を特定する。
ある局面において、仮想カメラ14は、2つの仮想カメラ、すなわち、右目用の画像を提供するための仮想カメラと、左目用の画像を提供するための仮想カメラとを含み得る。ユーザ5が3次元の仮想空間11を認識できるように、適切な視差が、2つの仮想カメラに設定される。別の局面において、仮想カメラ14を1つの仮想カメラにより実現してもよい。この場合、1つの仮想カメラにより得られた画像から、右目用の画像と左目用の画像とを生成するようにしてもよい。本実施の形態においては、仮想カメラ14が2つの仮想カメラを含み、2つの仮想カメラのロール軸が合成されることによって生成されるロール軸(w)がHMD120のロール軸(w)に適合されるように構成されているものとして、本開示に係る技術思想を例示する。
[コントローラ]
図8を参照して、コントローラ300の一例について説明する。図8は、ある実施の形態に従うコントローラ300の概略構成を表す図である。
図8に示されるように、ある局面において、コントローラ300は、右コントローラ300Rと図示せぬ左コントローラとを含み得る。右コントローラ300Rは、ユーザ5の右手で操作される。左コントローラは、ユーザ5の左手で操作される。ある局面において、右コントローラ300Rと左コントローラとは、別個の装置として対称に構成される。したがって、ユーザ5は、右コントローラ300Rを把持した右手と、左コントローラを把持した左手とをそれぞれ自由に動かすことができる。別の局面において、コントローラ300は両手の操作を受け付ける一体型のコントローラであってもよい。以下、右コントローラ300Rについて説明する。
右コントローラ300Rは、グリップ310と、フレーム320と、天面330とを備える。グリップ310は、ユーザ5の右手によって把持されるように構成されている。たとえば、グリップ310は、ユーザ5の右手の掌と3本の指(中指、薬指、小指)とによって保持され得る。
グリップ310は、ボタン340,350と、モーションセンサ420とを含む。ボタン340は、グリップ310の側面に配置され、右手の中指による操作を受け付ける。ボタン350は、グリップ310の前面に配置され、右手の人差し指による操作を受け付ける。ある局面において、ボタン340,350は、トリガー式のボタンとして構成される。モーションセンサ420は、グリップ310の筐体に内蔵されている。ユーザ5の動作がカメラその他の装置によってユーザ5の周りから検出可能である場合には、グリップ310は、モーションセンサ420を備えなくてもよい。
フレーム320は、その円周方向に沿って配置された複数の赤外線LED360を含む。赤外線LED360は、コントローラ300を使用するプログラムの実行中に、当該プログラムの進行に合わせて赤外線を発光する。赤外線LED360から発せられた赤外線は、右コントローラ300Rと左コントローラとの各位置や姿勢(傾き、向き)を検出するために使用され得る。図8に示される例では、二列に配置された赤外線LED360が示されているが、配列の数は図8に示されるものに限られない。一列あるいは3列以上の配列が使用されてもよい。
天面330は、ボタン370,380と、アナログスティック390とを備える。ボタン370,380は、プッシュ式ボタンとして構成される。ボタン370,380は、ユーザ5の右手の親指による操作を受け付ける。アナログスティック390は、ある局面において、初期位置(ニュートラルの位置)から360度任意の方向への操作を受け付ける。当該操作は、たとえば、仮想空間11に配置されるオブジェクトを移動するための操作を含む。
ある局面において、右コントローラ300Rおよび左コントローラは、赤外線LED360その他の部材を駆動するための電池を含む。電池は、充電式、ボタン型、乾電池型などを含むが、これらに限定されない。別の局面において、右コントローラ300Rと左コントローラは、たとえば、コンピュータ200のUSBインターフェイスに接続され得る。この場合、右コントローラ300Rおよび左コントローラは、電池を必要としない。
図8の状態(A)および状態(B)に示されるように、例えば、ユーザ5の右手に対して、ヨー、ロール、ピッチの各方向が規定される。ユーザ5が親指と人差し指とを伸ばした場合に、親指の伸びる方向がヨー方向、人差し指の伸びる方向がロール方向、ヨー方向の軸およびロール方向の軸によって規定される平面に垂直な方向がピッチ方向として規定される。
[サーバのハードウェア構成]
図9を参照して、本実施の形態に係るサーバ600について説明する。図9は、ある実施の形態に従うサーバ600のハードウェア構成の一例を表すブロック図である。サーバ600は、主たる構成要素として、プロセッサ610と、メモリ620と、ストレージ630と、入出力インターフェイス640と、通信インターフェイス650とを備える。各構成要素は、それぞれ、バス660に接続されている。
プロセッサ610は、サーバ600に与えられる信号に基づいて、あるいは、予め定められた条件が成立したことに基づいて、メモリ620またはストレージ630に格納されているプログラムに含まれる一連の命令を実行する。ある局面において、プロセッサ610は、CPU、GPU、MPU、FPGAその他のデバイスとして実現される。
メモリ620は、プログラムおよびデータを一時的に保存する。プログラムは、例えば、ストレージ630からロードされる。データは、サーバ600に入力されたデータと、プロセッサ610によって生成されたデータとを含む。ある局面において、メモリ620は、RAMその他の揮発メモリとして実現される。
ストレージ630は、プログラムおよびデータを永続的に保持する。ストレージ630は、例えば、ROM、ハードディスク装置、フラッシュメモリ、その他の不揮発記憶装置として実現される。ストレージ630に格納されるプログラムは、HMDシステム100において仮想空間を提供するためのプログラム、シミュレーションプログラム、ゲームプログラム、ユーザ認証プログラム、コンピュータ200との通信を実現するためのプログラムを含んでもよい。ストレージ630に格納されるデータは、仮想空間を規定するためのデータおよびオブジェクト等を含んでもよい。
別の局面において、ストレージ630は、メモリカードのように着脱可能な記憶装置として実現されてもよい。さらに別の局面において、サーバ600に内蔵されたストレージ630の代わりに、外部の記憶装置に保存されているプログラムおよびデータを使用する構成が使用されてもよい。このような構成によれば、例えば、アミューズメント施設のように複数のHMDシステム100が使用される場面において、プログラムやデータの更新を一括して行なうことが可能になる。
入出力インターフェイス640は、入出力機器との間で信号を通信する。ある局面において、入出力インターフェイス640は、USB、DVI、HDMI(登録商標)その他の端子を用いて実現される。入出力インターフェイス640は上述のものに限られない。
通信インターフェイス650は、ネットワーク2に接続されて、ネットワーク2に接続されているコンピュータ200と通信する。ある局面において、通信インターフェイス650は、例えば、LANその他の有線通信インターフェイス、あるいは、WiFi、Bluetooth、NFCその他の無線通信インターフェイスとして実現される。通信インターフェイス650は上述のものに限られない。
ある局面において、プロセッサ610は、ストレージ630にアクセスし、ストレージ630に格納されている1つ以上のプログラムをメモリ620にロードし、当該プログラムに含まれる一連の命令を実行する。当該1つ以上のプログラムは、サーバ600のオペレーティングシステム、仮想空間を提供するためのアプリケーションプログラム、仮想空間で実行可能なゲームソフトウェア等を含み得る。プロセッサ610は、入出力インターフェイス640を介して、仮想空間を提供するための信号をコンピュータ200に送ってもよい。
[HMDの制御装置]
図10を参照して、HMD120の制御装置について説明する。ある実施の形態において、制御装置は周知の構成を有するコンピュータ200によって実現される。図10は、ある実施の形態に従うコンピュータ200をモジュール構成として表わすブロック図である。
図10に示されるように、コンピュータ200は、コントロールモジュール510と、レンダリングモジュール520と、メモリモジュール530と、通信制御モジュール540とを備える。ある局面において、コントロールモジュール510とレンダリングモジュール520とは、プロセッサ210によって実現される。別の局面において、複数のプロセッサ210がコントロールモジュール510とレンダリングモジュール520として作動してもよい。メモリモジュール530は、メモリ220またはストレージ230によって実現される。通信制御モジュール540は、通信インターフェイス250によって実現される。
コントロールモジュール510は、ユーザ5に提供される仮想空間11を制御する。コントロールモジュール510は、仮想空間11を表す仮想空間データを用いて、HMDシステム100における仮想空間11を規定する。仮想空間データは、例えば、メモリモジュール530に記憶されている。コントロールモジュール510が、仮想空間データを生成したり、サーバ600などから仮想空間データを取得するようにしたりしてもよい。
コントロールモジュール510は、オブジェクトを表すオブジェクトデータを用いて、仮想空間11にオブジェクトを配置する。オブジェクトデータは、例えば、メモリモジュール530に記憶されている。コントロールモジュール510が、オブジェクトデータを生成したり、サーバ600などからオブジェクトデータを取得するようにしたりしてもよい。オブジェクトは、例えば、ユーザ5の分身であるアバターオブジェクト、キャラクタオブジェクト、コントローラ300によって操作される仮想手などの操作オブジェクト、ゲームのストーリーの進行に従って配置される森、山その他を含む風景、街並み、動物等を含み得る。
コントロールモジュール510は、ネットワーク2を介して接続される他のコンピュータ200のユーザ5のアバターオブジェクトを仮想空間11に配置する。ある局面において、コントロールモジュール510は、ユーザ5のアバターオブジェクトを仮想空間11に配置する。ある局面において、コントロールモジュール510は、ユーザ5を含む画像に基づいて、ユーザ5を模したアバターオブジェクトを仮想空間11に配置する。別の局面において、コントロールモジュール510は、複数種類のアバターオブジェクト(例えば、動物を模したオブジェクトや、デフォルメされた人のオブジェクト)の中からユーザ5による選択を受け付けたアバターオブジェクトを仮想空間11に配置する。
コントロールモジュール510は、HMDセンサ410の出力に基づいてHMD120の傾きを特定する。別の局面において、コントロールモジュール510は、モーションセンサとして機能するセンサ190の出力に基づいてHMD120の傾きを特定する。コントロールモジュール510は、第1カメラ150および第2カメラ160が生成するユーザ5の顔の画像から、ユーザ5の顔を構成する器官(例えば、口,目,眉)を検出する。コントロールモジュール510は、検出した各器官の動き(形状)を検出する。
コントロールモジュール510は、注視センサ140からの信号に基づいて、ユーザ5の仮想空間11における視線を検出する。コントロールモジュール510は、検出したユーザ5の視線と仮想空間11の天球とが交わる視点位置(XYZ座標系における座標値)を検出する。より具体的には、コントロールモジュール510は、uvw座標系で規定されるユーザ5の視線と、仮想カメラ14の位置および傾きとに基づいて、視点位置を検出する。コントロールモジュール510は、検出した視点位置をサーバ600に送信する。別の局面において、コントロールモジュール510は、ユーザ5の視線を表す視線情報をサーバ600に送信するように構成されてもよい。係る場合、サーバ600が受信した視線情報に基づいて視点位置を算出し得る。
コントロールモジュール510は、HMDセンサ410が検出するHMD120の動きをアバターオブジェクトに反映する。例えば、コントロールモジュール510は、HMD120が傾いたことを検知して、アバターオブジェクトを傾けて配置する。コントロールモジュール510は、検出した顔器官の動作を、仮想空間11に配置されるアバターオブジェクトの顔に反映させる。コントロールモジュール510は、サーバ600から他のユーザ5の視線情報を受信し、当該他のユーザ5のアバターオブジェクトの視線に反映させる。ある局面において、コントロールモジュール510は、コントローラ300の動きをアバターオブジェクトや操作オブジェクトに反映する。この場合、コントローラ300は、コントローラ300の動きを検知するためのモーションセンサ、加速度センサ、または複数の発光素子(例えば、赤外線LED)などを備える。
コントロールモジュール510は、仮想空間11においてユーザ5の操作を受け付けるための操作オブジェクトを仮想空間11に配置する。ユーザ5は、操作オブジェクトを操作することにより、例えば、仮想空間11に配置されるオブジェクトを操作する。ある局面において、操作オブジェクトは、例えば、ユーザ5の手に相当する仮想手である手オブジェクト等を含み得る。ある局面において、コントロールモジュール510は、モーションセンサ420の出力に基づいて現実空間におけるユーザ5の手の動きに連動するように仮想空間11において手オブジェクトを動かす。ある局面において、操作オブジェクトは、アバターオブジェクトの手の部分に相当し得る。
コントロールモジュール510は、仮想空間11に配置されるオブジェクトのそれぞれが、他のオブジェクトと衝突した場合に、当該衝突を検出する。コントロールモジュール510は、例えば、あるオブジェクトのコリジョンエリアと、別のオブジェクトのコリジョンエリアとが触れたタイミングを検出することができ、当該検出がされたときに、予め定められた処理を行なう。コントロールモジュール510は、オブジェクトとオブジェクトとが触れている状態から離れたタイミングを検出することができ、当該検出がされたときに、予め定められた処理を行なう。コントロールモジュール510は、オブジェクトとオブジェクトとが触れている状態であることを検出することができる。例えば、コントロールモジュール510は、操作オブジェクトと、他のオブジェクトとが触れたときに、これら操作オブジェクトと他のオブジェクトとが触れたことを検出して、予め定められた処理を行なう。
ある局面において、コントロールモジュール510は、HMD120のモニタ130における画像表示を制御する。例えば、コントロールモジュール510は、仮想空間11に仮想カメラ14を配置する。コントロールモジュール510は、仮想空間11における仮想カメラ14の位置と、仮想カメラ14の傾き(向き)を制御する。コントロールモジュール510は、HMD120を装着したユーザ5の頭の傾きと、仮想カメラ14の位置に応じて、視界領域15を規定する。レンダリングモジュール520は、決定された視界領域15に基づいて、モニタ130に表示される視界画像17を生成する。レンダリングモジュール520により生成された視界画像17は、通信制御モジュール540によってHMD120に出力される。
コントロールモジュール510は、HMD120から、ユーザ5のマイク170を用いた発話を検出すると、当該発話に対応する音声データの送信対象のコンピュータ200を特定する。音声データは、コントロールモジュール510によって特定されたコンピュータ200に送信される。コントロールモジュール510は、ネットワーク2を介して他のユーザのコンピュータ200から音声データを受信すると、当該音声データに対応する音声(発話)をスピーカ180から出力する。
メモリモジュール530は、コンピュータ200が仮想空間11をユーザ5に提供するために使用されるデータを保持している。ある局面において、メモリモジュール530は、空間情報と、オブジェクト情報と、ユーザ情報とを保持している。
空間情報は、仮想空間11を提供するために規定された1つ以上のテンプレートを保持している。
オブジェクト情報は、仮想空間11を構成する複数のパノラマ画像13、仮想空間11にオブジェクトを配置するためのオブジェクトデータを含む。パノラマ画像13は、静止画像および動画像を含み得る。パノラマ画像13は、非現実空間の画像と現実空間の画像とを含み得る。非現実空間の画像としては、例えば、コンピュータグラフィックスで生成された画像が挙げられる。
ユーザ情報は、ユーザ5を識別するユーザIDを保持する。ユーザIDは、例えば、ユーザが使用するコンピュータ200に設定されるIP(Internet Protocol)アドレスまたはMAC(Media Access Control)アドレスであり得る。別の局面において、ユーザIDはユーザによって設定され得る。ユーザ情報は、HMDシステム100の制御装置としてコンピュータ200を機能させるためのプログラム等を含む。
メモリモジュール530に格納されているデータおよびプログラムは、HMD120のユーザ5によって入力される。あるいは、プロセッサ210が、当該コンテンツを提供する事業者が運営するコンピュータ(例えば、サーバ600)からプログラムあるいはデータをダウンロードして、ダウンロードされたプログラムあるいはデータをメモリモジュール530に格納する。
通信制御モジュール540は、ネットワーク2を介して、サーバ600その他の情報通信装置と通信し得る。
ある局面において、コントロールモジュール510及びレンダリングモジュール520は、例えば、ユニティテクノロジーズ社によって提供されるUnity(登録商標)を用いて実現され得る。別の局面において、コントロールモジュール510及びレンダリングモジュール520は、各処理を実現する回路素子の組み合わせとしても実現され得る。
コンピュータ200における処理は、ハードウェアと、プロセッサ210により実行されるソフトウェアとによって実現される。このようなソフトウェアは、ハードディスクその他のメモリモジュール530に予め格納されている場合がある。ソフトウェアは、CD-ROMその他のコンピュータ読み取り可能な不揮発性のデータ記録媒体に格納されて、プログラム製品として流通している場合もある。あるいは、当該ソフトウェアは、インターネットその他のネットワークに接続されている情報提供事業者によってダウンロード可能なプログラム製品として提供される場合もある。このようなソフトウェアは、光ディスク駆動装置その他のデータ読取装置によってデータ記録媒体から読み取られて、あるいは、通信制御モジュール540を介してサーバ600その他のコンピュータからダウンロードされた後、記憶モジュールに一旦格納される。そのソフトウェアは、プロセッサ210によって記憶モジュールから読み出され、実行可能なプログラムの形式でRAMに格納される。プロセッサ210は、そのプログラムを実行する。
[HMDシステムの制御構造]
図11を参照して、HMDセット110の制御構造について説明する。図11は、ある実施の形態に従うHMDセット110において実行される処理の一部を表すシーケンスチャートである。
図11に示されるように、ステップS1110にて、コンピュータ200のプロセッサ210は、コントロールモジュール510として、仮想空間データを特定し、仮想空間1を定義する。
ステップS1120にて、プロセッサ210は、仮想カメラ14を初期化する。たとえば、プロセッサ210は、メモリのワーク領域において、仮想カメラ14を仮想空間11において予め規定された中心12に配置し、仮想カメラ14の視線をユーザ5が向いている方向に向ける。
ステップS1130にて、プロセッサ210は、レンダリングモジュール520として、初期の視界画像を表示するための視界画像データを生成する。生成された視界画像データは、通信制御モジュール540によってHMD120に出力される。
ステップS1132にて、HMD120のモニタ130は、コンピュータ200から受信した視界画像データに基づいて、視界画像を表示する。HMD120を装着したユーザ5は、視界画像を視認すると仮想空間11を認識し得る。
ステップS1134にて、HMDセンサ410は、HMD120から発信される複数の赤外線光に基づいて、HMD120の位置と傾きを検知する。検知結果は、動き検知データとして、コンピュータ200に出力される。
ステップS1140にて、プロセッサ210は、HMD120の動き検知データに含まれる位置と傾きとに基づいて、HMD120を装着したユーザ5の視界方向を特定する。
ステップS1150にて、プロセッサ210は、アプリケーションプログラムを実行し、アプリケーションプログラムに含まれる命令に基づいて、仮想空間11にオブジェクトを配置する。
ステップS1160にて、コントローラ300は、モーションセンサ420から出力される信号に基づいて、ユーザ5の操作を検出し、その検出された操作を表す検出データをコンピュータ200に出力する。別の局面において、ユーザ5によるコントローラ300の操作は、ユーザ5の周囲に配置されたカメラからの画像に基づいて検出されてもよい。
ステップS1170にて、プロセッサ210は、コントローラ300から取得した検出データに基づいて、ユーザ5によるコントローラ300の操作を検出する。
ステップS1180にて、プロセッサ210は、ユーザ5によるコントローラ300の操作に基づく視界画像データを生成する。生成された視界画像データは、通信制御モジュール540によってHMD120に出力される。
ステップS1190にて、HMD120は、受信した視界画像データに基づいて視界画像を更新し、更新後の視界画像をモニタ130に表示する。
[アバターオブジェクト]
図12(A)、(B)を参照して、本実施の形態に従うアバターオブジェクトについて説明する。以下、HMDセット110A,110Bの各ユーザ5のアバターオブジェクトを説明する図である。以下、HMDセット110Aのユーザをユーザ5A、HMDセット110Bのユーザをユーザ5B、HMDセット110Cのユーザをユーザ5C、HMDセット110Dのユーザをユーザ5Dと表す。HMDセット110Aに関する各構成要素の参照符号にAが付され、HMDセット110Bに関する各構成要素の参照符号にBが付され、HMDセット110Cに関する各構成要素の参照符号にCが付され、HMDセット110Dに関する各構成要素の参照符号にDが付される。例えば、HMD120Aは、HMDセット110Aに含まれる。
図12(A)は、ネットワーク2において、各HMD120がユーザ5に仮想空間11を提供する状況を表す模式図である。コンピュータ200A~200Dは、HMD120A~120Dを介して、ユーザ5A~5Dに、仮想空間11A~11Dをそれぞれ提供する。図12(A)に示される例において、仮想空間11Aおよび仮想空間11Bは同じデータによって構成されている。換言すれば、コンピュータ200Aとコンピュータ200Bとは同じ仮想空間を共有していることになる。仮想空間11Aおよび仮想空間11Bには、ユーザ5Aのアバターオブジェクト6Aと、ユーザ5Bのアバターオブジェクト6Bとが存在する。仮想空間11Aにおけるアバターオブジェクト6Aおよび仮想空間11Bにおけるアバターオブジェクト6BがそれぞれHMD120を装着しているが、これは説明を分かりやすくするためのものであって、実際にはこれらのオブジェクトはHMD120を装着していない。
ある局面において、プロセッサ210Aは、ユーザ5Aの視界画像17Aを撮影する仮想カメラ14Aを、アバターオブジェクト6Aの目の位置に配置し得る。
図12(B)は、図12(A)におけるユーザ5Aの視界画像17Aを示す図である。視界画像17Aは、HMD120Aのモニタ130Aに表示される画像である。この視界画像17Aは、仮想カメラ14Aにより生成された画像である。視界画像17Aには、ユーザ5Bのアバターオブジェクト6Bが表示されている。特に図示はしていないが、ユーザ5Bの視界画像にも同様に、ユーザ5Aのアバターオブジェクト6Aが表示されている。
図12(B)の状態において、ユーザ5Aは仮想空間11Aを介してユーザ5Bと対話による通信(コミュニケーション)を図ることができる。より具体的には、マイク170Aにより取得されたユーザ5Aの音声は、サーバ600を介してユーザ5BのHMD120Bに送信され、HMD120Bに設けられたスピーカ180Bから出力される。ユーザ5Bの音声は、サーバ600を介してユーザ5AのHMD120Aに送信され、HMD120Aに設けられたスピーカ180Aから出力される。
ユーザ5Bの動作(HMD120Bの動作およびコントローラ300Bの動作)は、プロセッサ210Aにより仮想空間11Aに配置されるアバターオブジェクト6Bに反映される。これにより、ユーザ5Aは、ユーザ5Bの動作を、アバターオブジェクト6Bを通じて認識できる。
図13は、本実施の形態に従うHMDシステム100において実行される処理の一部を表すシーケンスチャートである。図13においては、HMDセット110Dを図示していないが、HMDセット110Dについても、HMDセット110A、110B、110Cと同様に動作する。以下の説明でも、HMDセット110Aに関する各構成要素の参照符号にAが付され、HMDセット110Bに関する各構成要素の参照符号にBが付され、HMDセット110Cに関する各構成要素の参照符号にCが付され、HMDセット110Dに関する各構成要素の参照符号にDが付されるものとする。
ステップS1310Aにおいて、HMDセット110Aにおけるプロセッサ210Aは、仮想空間11Aにおけるアバターオブジェクト6Aの動作を決定するためのアバター情報を取得する。このアバター情報は、例えば、動き情報、フェイストラッキングデータ、および音声データ等のアバターに関する情報を含む。動き情報は、HMD120Aの位置および傾きの時間的変化を示す情報や、モーションセンサ420A等により検出されたユーザ5Aの手の動きを示す情報などを含む。フェイストラッキングデータは、ユーザ5Aの顔の各パーツの位置および大きさを特定するデータが挙げられる。フェイストラッキングデータは、ユーザ5Aの顔を構成する各器官の動きを示すデータや視線データが挙げられる。音声データは、HMD120Aのマイク170Aによって取得されたユーザ5Aの音声を示すデータが挙げられる。アバター情報には、アバターオブジェクト6A、あるいはアバターオブジェクト6Aに関連付けられるユーザ5Aを特定する情報や、アバターオブジェクト6Aが存在する仮想空間11Aを特定する情報等が含まれてもよい。アバターオブジェクト6Aやユーザ5Aを特定する情報としては、ユーザIDが挙げられる。アバターオブジェクト6Aが存在する仮想空間11Aを特定する情報としては、ルームIDが挙げられる。プロセッサ210Aは、上述のように取得されたアバター情報を、ネットワーク2を介してサーバ600に送信する。
ステップS1310Bにおいて、HMDセット110Bにおけるプロセッサ210Bは、ステップS1310Aにおける処理と同様に、仮想空間11Bにおけるアバターオブジェクト6Bの動作を決定するためのアバター情報を取得し、サーバ600に送信する。同様に、ステップS1310Cにおいて、HMDセット110Cにおけるプロセッサ210Cは、仮想空間11Cにおけるアバターオブジェクト6Cの動作を決定するためのアバター情報を取得し、サーバ600に送信する。
ステップS1320において、サーバ600は、HMDセット110A、HMDセット110B、およびHMDセット110Cのそれぞれから受信したプレイヤ情報を一旦記憶する。サーバ600は、各アバター情報に含まれるユーザIDおよびルームID等に基づいて、共通の仮想空間11に関連付けられた全ユーザ(この例では、ユーザ5A~5C)のアバター情報を統合する。そして、サーバ600は、予め定められたタイミングで、統合したアバター情報を当該仮想空間11に関連付けられた全ユーザに送信する。これにより、同期処理が実行される。このような同期処理により、HMDセット110A、HMDセット110B、およびHMD110Cは、互いのアバター情報をほぼ同じタイミングで共有することができる。
続いて、サーバ600から各HMDセット110A~110Cに送信されたアバター情報に基づいて、各HMDセット110A~110Cは、ステップS1330A~S1330Cの処理を実行する。ステップS1330Aの処理は、図11におけるステップS1180の処理に相当する。
ステップS1330Aにおいて、HMDセット110Aにおけるプロセッサ210Aは、仮想空間11Aにおける他のユーザ5B,5Cのアバターオブジェクト6B、アバターオブジェクト6Cの情報を更新する。具体的には、プロセッサ210Aは、HMDセット110Bから送信されたアバター情報に含まれる動き情報に基づいて、仮想空間11におけるアバターオブジェクト6Bの位置および向き等を更新する。例えば、プロセッサ210Aは、メモリモジュール530に格納されたオブジェクト情報に含まれるアバターオブジェクト6Bの情報(位置および向き等)を更新する。同様に、プロセッサ210Aは、HMDセット110Cから送信されたアバター情報に含まれる動き情報に基づいて、仮想空間11におけるアバターオブジェクト6Cの情報(位置および向き等)を更新する。
ステップS1330Bにおいて、HMDセット110Bにおけるプロセッサ210Bは、ステップS1330Aにおける処理と同様に、仮想空間11Bにおけるユーザ5A,5Cのアバターオブジェクト6A,6Cの情報を更新する。同様に、ステップS1330Cにおいて、HMDセット110Cにおけるプロセッサ210Cは、仮想空間11Cにおけるユーザ5A,5Bのアバターオブジェクト6A,6Bの情報を更新する。
[モジュールの詳細構成]
図14を参照して、コンピュータ200のモジュール構成の詳細について説明する。図14は、ある実施の形態に従うコンピュータ200のモジュールの詳細構成を表わすブロック図である。
図14に示されるように、コントロールモジュール510は、仮想カメラ制御モジュール1421と、視界領域決定モジュール1422と、基準視線特定モジュール1423と、顔器官検出モジュール1424と、動き検出モジュール1424と、仮想空間定義モジュール1425と、仮想オブジェクト生成モジュール1426と、遮蔽対象特定モジュール1427と、仮想オブジェクト制御モジュール1428と、操作オブジェクト制御モジュール1429と、を備える。レンダリングモジュール520は、視界画像生成モジュール1438を備える。メモリモジュール530は、空間情報1431と、オブジェクト情報1432と、ユーザ情報1433と、を保持している。
仮想カメラ制御モジュール1421は、仮想空間11に仮想カメラ14(仮想視点)を配置する。仮想カメラ制御モジュール1421は、仮想空間11における仮想カメラ14の配置位置と、仮想カメラ14の向き(傾き)を制御する。視界領域決定モジュール1422は、HMD120を装着したユーザの頭の向きと、仮想カメラ14の配置位置に応じて、視界領域15(視界)を定義する。視界画像生成モジュール1438は、決定された視界領域15と後述する仮想空間データとに基づいて、モニタ130に表示される視界画像17を生成する。
基準視線特定モジュール1423は、注視センサ140からの信号に基づいて、ユーザ5の視線を特定する。動き検出モジュール1424は、第1カメラ150および第2カメラ160が生成するユーザ5の顔の画像から、ユーザ5の顔を構成する器官(例えば、口,目,眉)を検出し、且つ、各器官の動き(形状)を検出する。
仮想空間定義モジュール1425は、仮想空間11を表わす仮想空間データを生成することにより、HMDシステム100における仮想空間11を定義する。
仮想オブジェクト生成モジュール1426は、仮想空間11に配置される1又は複数の仮想オブジェクトを生成する。仮想オブジェクトは、例えば、部材、構造物や人を含み得るが、これらに限られず、ゲームのストーリーの進行に従って配置される森、山その他を含む風景、動物等を含み得る。また、仮想オブジェクトは、後述するアバターオブジェクトを含む。
遮蔽対象特定モジュール1427は、後述の遮蔽オブジェクトにより遮蔽される対象を特定する。この遮蔽対象は、上記の人等の仮想オブジェクトの少なくとも一部(遮蔽対象部位)であってもよいし、仮想オブジェクトの全体であってもよい。また、遮蔽対象は、360度映像上に映るオブジェクトであってもよい。360度映像上に映るオブジェクトは、例えば、部材、構造物や人を含み得るが、これらに限られず、森、山その他を含む風景、動物等を含み得る。遮蔽対象特定モジュール1427は、仮想オブジェクト生成モジュール1426が仮想オブジェクトを生成する際に、又は、仮想オブジェクトを生成した後に、当該仮想オブジェクトの遮蔽対象部位を特定してもよい。
仮想オブジェクト制御モジュール1428は、遮蔽対象と、遮蔽対象を遮蔽するための遮蔽オブジェクト(第1オブジェクト)と、を仮想空間11に配置する。仮想オブジェクト制御モジュール1428は、視界に遮蔽対象が含まれる場合、遮蔽対象が第1オブジェクトにより遮蔽されるように、第1オブジェクトの配置(例えば、位置及び傾きの少なくとも一方を含む。)を制御する。ここで、遮蔽オブジェクト(第1オブジェクト)は、遮蔽対象を遮蔽することができるオブジェクトであり、例えば、いわゆるモザイク画像、又は、遮蔽対象を遮蔽可能なように黒色等の色が付された画像を含む。また、遮蔽オブジェクトは、平面又は立体形状からなる部材を模したオブジェクトであってもよく、当該部材としては、すりガラスや屈折率が高い半透明の他の部材を含んでもよい。
仮想オブジェクト制御モジュール1428は、ネットワーク2を介して接続される他のコンピュータ200のユーザのアバターオブジェクトを仮想空間11に配置するためのデータを生成する。ある局面において、仮想オブジェクト制御モジュール1428は、ユーザ5のアバターオブジェクトを仮想空間11に配置するためのデータを生成する。ある局面において、仮想オブジェクト制御モジュール1428は、ユーザ5を含む画像に基づいて、ユーザ5を模したアバターオブジェクトを生成する。別の局面において、仮想オブジェクト制御モジュール1428は、複数種類のアバターオブジェクト(例えば、動物を模したオブジェクトや、デフォルメされた人のオブジェクト)の中からユーザ5による選択を受け付けたアバターオブジェクトを仮想空間11に配置するためのデータを生成する。
仮想オブジェクト制御モジュール1428は、HMDセンサ410が検出するHMD120の動きをアバターオブジェクトに反映する。例えば、仮想オブジェクト制御モジュール1428は、HMD120が傾いたことを検知して、アバターオブジェクトを傾けて配置するためのデータを生成する。ある局面において、仮想オブジェクト制御モジュール1428は、コントローラ300の動きをアバターオブジェクトに反映する。この場合、コントローラ300は、コントローラ300の動きを検知するためのモーションセンサ、加速度センサ、または複数の発光素子(例えば、赤外線LED)などを備える。仮想オブジェクト制御モジュール1428は、動き検出モジュール1424が検出した顔器官の動作を、仮想空間11に配置されるアバターオブジェクトの顔に反映させる。つまり、仮想オブジェクト制御モジュール1428は、ユーザ5Aの顔の動作をアバターオブジェクトに反映する。
操作オブジェクト制御モジュール1429は、仮想空間11においてユーザの操作を受け付けるための操作オブジェクトを仮想空間11に配置する。ユーザは、操作オブジェクトを操作することにより、例えば、仮想空間11に配置される遮蔽対象を動かすことができる。操作オブジェクト制御モジュール1429は、操作オブジェクトと、仮想空間11に配置される、遮蔽対象部位を有する被遮蔽オブジェクト(第2オブジェクト)と、を関連づける。仮想オブジェクト制御モジュール1428は、操作オブジェクト制御モジュール1429による操作オブジェクトの動きに応じて、操作オブジェクトに関連づけられた被遮蔽オブジェクトの配置を制御する。仮想オブジェクト制御モジュール1428は、被遮蔽オブジェクトの動きに伴い遮蔽対象部位の配置が変化したことに応じて、遮蔽対象部位が遮蔽オブジェクト(第1オブジェクト)により遮蔽されるように、遮蔽オブジェクトの配置を制御してもよい。
ある局面において、操作オブジェクトは、例えば、HMD120を装着したユーザの手に相当する手オブジェクト等を含み得る。ある局面において、操作オブジェクトは、上述したアバターオブジェクトの手の部分に相当し得る。例えば、操作オブジェクト制御モジュール1429は、図1に示すコンローラ300の動きに応じて、HMD120を装着したユーザの手に相当する手オブジェクトを動かす。手オブジェクト及び被遮蔽オブジェクトにはそれぞれコリジョンエリアが仮想空間内で設定されており、両者のコリジョンエリアが接触すると、手オブジェクトと被遮蔽オブジェクトとが接触したと判定される。また、図8に示すコントローラ300の各種ボタン340、350、370、380等が押下されることによりユーザの手の指の曲げが検知されると、手オブジェクトの指も曲がる。例えば、手オブジェクトと被遮蔽オブジェクトとが接触状態である場合に、ユーザの手の指を曲げることにより手オブジェクトで被遮蔽オブジェクトを掴むことができる。そして、手オブジェクトで被遮蔽オブジェクトを掴んだ状態で、手オブジェクトの配置が制御されると、手オブジェクトの配置の変化に対応するように被遮蔽オブジェクトの配置も変化する。これにより、ユーザがコントローラ300を操作することにより、仮想空間内で手オブジェクトにより被遮蔽オブジェクトを把持したり移動させることができる。
コントロールモジュール510は、仮想空間11に配置されるオブジェクトのそれぞれが、他のオブジェクトと衝突した場合に、当該衝突を検出する。コントロールモジュール510は、例えば、あるオブジェクトと、別のオブジェクトとが触れたタイミングを検出することができ、当該検出がされたときに、予め定められた処理を行なう。コントロールモジュール510は、オブジェクトとオブジェクトとが触れている状態から離れたタイミングを検出することができ、当該検出がされたときに、予め定められた処理を行なう。コントロールモジュール510は、オブジェクトとオブジェクトとが触れている状態であることを検出することができる。具体的には、操作オブジェクト制御モジュール1428は、操作オブジェクトと、他のオブジェクトとが触れたときに、これら操作オブジェクトと他のオブジェクトとが触れたことを検出して、予め定められた処理を行なう。
メモリモジュール530は、コンピュータ200が仮想空間11をユーザ5に提供するために使用されるデータを保持している。ある局面において、メモリモジュール530は、空間情報1431と、オブジェクト情報1432と、ユーザ情報1433と、を保持している。
空間情報1431は、仮想空間11を提供するために規定された1つ以上のテンプレートを保持している。
オブジェクト情報1432は、仮想空間11において再生されるコンテンツ、当該コンテンツで使用されるオブジェクト、およびオブジェクトを仮想空間11に配置するための情報(たとえば、位置情報)を保持している。当該コンテンツは、例えば、ゲーム、現実社会と同様の風景を表したコンテンツ等を含み得る。
ユーザ情報1433は、HMDシステム100の制御装置としてコンピュータ200を機能させるためのプログラム、オブジェクト情報1432に保持される各コンテンツを使用するアプリケーションプログラム等を保持している。
[HMDシステムの制御構造]
図15を参照して、HMDセット110の制御構造について説明する。図15は、ある実施の形態に従うHMDセット110において実行される処理の一部を表すシーケンスチャートである。なお、図15におけるステップS1110~ステップS1140、及び、ステップS1160~ステップS1190は、図11におけるステップS1110~ステップS1140、及び、ステップS1160~ステップS1190と同様の処理であるため、説明を省略する。
ステップS1550にて、プロセッサ210は、アプリケーションプログラムを実行し、アプリケーションプログラムに含まれる命令に基づいて、仮想空間11に配置する1又は複数の仮想オブジェクトのうち、遮蔽対象を特定する。また、プロセッサ210は、被遮蔽オブジェクトの少なくとも一部の部位を、遮蔽対象部位として特定してもよい。
ステップS1560にて、プロセッサ210は、アプリケーションプログラムを実行し、アプリケーションプログラムに含まれる命令に基づいて、仮想空間11において、遮蔽対象が遮蔽オブジェクトにより遮蔽されるように、遮蔽オブジェクトの配置を制御する。
図16は、被遮蔽オブジェクト8A(遮蔽対象)を遮蔽オブジェクト8Cにより遮蔽する制御を説明するための図である。図16(A)は、被遮蔽オブジェクト8Aを含む仮想空間において視界領域15をY方向から見た図と、仮想カメラ14から見た視界画像17Bを示す図である。図16(B)は、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとを含む仮想空間において視界領域15をY方向から見た図と、仮想カメラ14から見た視界画像17Bを示す図である。図16(B)の例では、図16(A)の例と比較すると、仮想カメラ14から見て被遮蔽オブジェクト8Aが遮蔽オブジェクト8Cにより遮蔽されるように、Z軸方向において仮想カメラ14と被遮蔽オブジェクト8Aとの間に遮蔽オブジェクト8Cが新たに配置される。遮蔽オブジェクト8Cは、平面Sを有する形状となっている。遮蔽オブジェクトの配置は、図14に示す仮想オブジェクト制御モジュール1428の制御に従って行われる。
仮想オブジェクト制御モジュール1428は、遮蔽オブジェクト(第1オブジェクト)の向きも制御し、例えば、遮蔽オブジェクト8Cの平面Sが仮想カメラ14のZ軸方向に対して垂直となるように制御する。この場合、平面Sが仮想カメラ14のZ軸方向に対して垂直でない場合と比較して、広範囲の遮蔽を実現することができる。
図17は、被遮蔽オブジェクト8A(遮蔽対象)が移動した場合に、その動きに遮蔽オブジェクト8Cが追従し、被遮蔽オブジェクト8Aを常に遮蔽するための制御を説明する図である。図17(A)は、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとを含む仮想空間をY方向から見た図と、仮想カメラ14から見た、被遮蔽オブジェクト8Aが遮蔽オブジェクト8Cにより遮蔽される視界画像を示す図である。
図17(B)は、図17(A)に示す例から被遮蔽オブジェクト8Aが移動した後の状態を示しており、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとを含む仮想空間において視界領域をY方向から見た図と、仮想カメラ14から見た視界画像を示す図である。被遮蔽オブジェクト8Aは、図17(A)の位置から図17(B)の位置まで移動している。この移動に追従して、仮想オブジェクト制御モジュール1428の制御の下、被遮蔽オブジェクト8Aが遮蔽オブジェクト8Cにより遮蔽されるように、遮蔽オブジェクト8Cも移動する。この際、遮蔽オブジェクト8Cの平面Sが仮想カメラ14のZ軸方向に対して垂直となる位置関係を常に保持したまま、遮蔽オブジェクト8Cを移動させてもよい。本例では、移動した被遮蔽オブジェクト8Aに遮蔽オブジェクト8Cが追従する例を説明したが、被遮蔽オブジェクト8Aが移動するのではなく、仮想カメラ14が移動した結果として遮蔽オブジェクト8Cによる遮蔽範囲から被遮蔽オブジェクト8Aが外れそうになる場合に、遮蔽状態を維持すべく遮蔽オブジェクト8Cを移動させるようにしてもよい。
遮蔽オブジェクト8Cの配置を制御する手法については、様々な方法を採用し得る。例えば、仮想オブジェクト制御モジュール1428は、ビルボード制御を採用してもよい。仮想オブジェクト制御モジュール1428は、例えば、平面を有する遮蔽オブジェクト8Cの平面が仮想カメラ14の視線方向に対して常に垂直となるように遮蔽オブジェクト8Cを制御する。つまり、仮想オブジェクト制御モジュール1428は、平面を有する遮蔽オブジェクト8Cの平面が、図1に示すユーザ5から見て常に正面を向くように遮蔽オブジェクト8Cを制御する。
この構成によれば、仮想カメラ14、及び、被遮蔽オブジェクト8Aの少なくとも一つの配置が変更される場合であっても、被遮蔽オブジェクト8Aが遮蔽オブジェクト8Cにより適切に遮蔽される。
図18(A)は、被遮蔽オブジェクトと遮蔽オブジェクトとを含む仮想空間において視界領域をY方向から見た図である。図18(B)は、図18(A)の例に比べて、仮想カメラと被遮蔽オブジェクトとの間の距離が大きい状態を示す。各図に示すように、図14に示す仮想オブジェクト制御モジュール1428は、被遮蔽オブジェクト8A(遮蔽対象)に対する遮蔽オブジェクト(第1オブジェクト)のZ方向(奥行き方向)の距離が、仮想カメラ14と被遮蔽オブジェクト8AとのZ方向の距離に応じた距離となるように、遮蔽オブジェクトの配置を制御する。例えば、仮想オブジェクト制御モジュール1428は、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離が長くなる場合(図18(A)のL3から図18(B)のL4へ長くなる場合)、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとの間の距離をL1から、L1よりも長いL2となるように制御する。より具体的には、仮想オブジェクト制御モジュール1428は、距離L2を求める際には、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離の比率を示す以下の式を参照する。なお、仮想オブジェクト制御モジュール1428の距離L2の算出方法は、以下の式を参照する手法に限られない。
[式]
L2=(仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離L4/仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離L3)×L1
この構成によれば、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離に応じて、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとの間の距離を動的に制御するので、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離の変化によらず、被遮蔽オブジェクト8Aが遮蔽オブジェクト8Cにより適切に遮蔽される。
仮想オブジェクト制御モジュール1428は、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離に応じて、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとの間の距離を制御することに代えて、遮蔽オブジェクト8Cの形状を制御してもよい。また、仮想オブジェクト制御モジュール1428は、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離に応じて、被遮蔽オブジェクト8Aと遮蔽オブジェクト8Cとの間の距離を制御することに加えて、遮蔽オブジェクト8Cの形状を制御してもよい。なお、仮想オブジェクト制御モジュール1428は、遮蔽オブジェクト8Cの位置を制御するのみならず、遮蔽オブジェクト8Cの傾きをさらに制御してもよい。
この構成によれば、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離に応じて、遮蔽オブジェクト8Cの形状を制御するので、仮想カメラ14と被遮蔽オブジェクト8Aとの間の距離の変化によらず、被遮蔽オブジェクト8Aが遮蔽オブジェクト8Cにより適切に遮蔽される。
図19は、被遮蔽オブジェクト8Aの顔(遮蔽対象部位)が遮蔽オブジェクト8Cにより遮蔽される視界画像17Dを示す図である。図19に示すように、遮蔽オブジェクト8Cは、被遮蔽オブジェクト8Aの顔を遮蔽するために、「?」が円の中心部に配置された円形の部材が採用されてもよい。遮蔽オブジェクト8Cは、これに限られず、平面又は立体形状からなる部材を模した仮想オブジェクトであってもよい。当該部材としては、被遮蔽オブジェクト8Aの少なくとも一部を遮蔽可能である、すりガラスや屈折率が高い半透明の他の部材を含んでもよい。また、遮蔽オブジェクト8Cは、小片を寄せ合わせた絵や図像を示すモザイク画像、又は、被遮蔽オブジェクト8Aの少なくとも一部を遮蔽可能なように黒色等の色が付された画像を含んでもよい。
以上、本実施形態によれば、視界画像において、被遮蔽オブジェクトの遮蔽対象部位が遮蔽オブジェクトにより遮蔽されるように、仮想カメラと被遮蔽オブジェクトとの間に遮蔽オブジェクトが配置されるように制御する。よって、例えば、プレイヤの年齢等の属性によっては、ゲームを構成するVR空間において表示される仮想オブジェクトの特定部位を秘匿する必要があるという要請に対して十分に応えることができる。このように、本実施形態によれば、ユーザの仮想体験を向上させることができる。
上記各実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するものではない。本発明はその趣旨を逸脱することなく、変更/改良され得るとともに、本発明にはその等価物も含まれる。
図14に示す仮想オブジェクト制御モジュール1428は、例えば、図12に示すHMD120Bを装着するユーザ5Bに対応づけられたアバターオブジェクト6Bが被遮蔽オブジェクトであってもよい。この場合、仮想オブジェクト制御モジュール1428は、コンピュータ200Bよりアバターオブジェクト6Bを動作させるモーションデータを取得し、取得したモーションデータに応じて、アバターオブジェクト6Bを動作させる。そして、仮想オブジェクト制御モジュール1428は、アバターオブジェクト6Bの動きに伴いアバターオブジェクト6Bの少なくとも一部分である遮蔽対象部位の配置が変化したことに応じて、遮蔽対象部位が遮蔽オブジェクトにより遮蔽されるように、遮蔽オブジェクトの配置を制御してもよい。ここでは、被遮蔽オブジェクトがユーザBの動きに連動して動作するアバターオブジェクト6Bである場合について説明したが、これに限定されず、被遮蔽オブジェクトがNPC(Non Player Character)制御されるアバターオブジェクトであってもよい。
仮想オブジェクト制御モジュール1428は、任意のタイミングで遮蔽オブジェクトの表示形態を制御してもよい。また、仮想オブジェクト制御モジュール1428は、所定の条件が成立する前の遮蔽オブジェクト(第1オブジェクト)を第1態様で表示し、所定の条件が成立した後の遮蔽オブジェクトを第1態様よりも遮蔽対象の遮蔽度合いが低い第2態様で表示する。ここで、遮蔽度合いが低い態様とは、遮蔽範囲が狭い態様や遮蔽部分の透過率が高い態様等を含む。所定の条件とは、例えば、仮想空間が構成するゲームの進捗、ゲームにおける課金、及びゲームにおけるアイテムの使用の少なくとも一つに関する条件を含む。具体的に、所定の条件が成立するとは、ゲームにおけるイベントをクリアしたり、ゲームにおいて課金(例えば、現金や電子マネー等が支払われることや投げ銭行為が行われること等)が実行されたり、又は、ゲームにおけるアイテム(現金や電子マネー等が支払われることにより得られる課金アイテム含む)が消費されたりすることを含む。
本実施形態は、以下のようなゲームにも適用可能である。例えば、サンプル版やベータ版においては所定の遮蔽対象部位が遮蔽されるが、正規版を入手すると、当該部位の遮蔽が解除されるゲーム、モザイクで遮蔽されたものを当てるゲームであって、課金に応じて段階的にモザイクが解除されたり、他のゲームやイベントの進捗に応じて段階的にモザイクが解除されるゲーム、又は、ゲームやイベントをクリアすることに対する報酬としてモザイクが解除されるゲームが挙げられる。
なお、上記した視界画像は、360度動画であり、当該視界画像に含まれる仮想オブジェクトは、360度動画に含まれる人物等に対応するものであってもよい。例えば、コンピュータ200により、360度動画に対して画像認識処理を実行し、予め定められた設定情報、例えば、予め人物の頭部を遮蔽することを示す設定情報に基づいて、360度動画に含まれる人物等の少なくとも一部の遮蔽対象部位を特定してもよい。また、360度動画は、予め定められた設定情報に基づいて、予め遮蔽したい位置にマーカ等を付した状態で撮影され、撮影されたことにより画像データとして取得され記録されてもよい。
他方、コンピュータ200は、ユーザからの指示に基づいて、360度動画に含まれる人物等の少なくとも一部の遮蔽対象部位を特定してもよい。例えば、ユーザは360度動画をモニタや他の表示装置で確認しながら、360度動画に含まれる人物等の少なくとも一部の遮蔽対象部位を確認し、コンピュータ200に対して指示してもよい。なお、ユーザは、遮蔽対象部位を表示装置上で指定することにより、コンピュータに対して遮蔽対象部分を通知してもよい。また、コンピュータ200は、HMDに搭載された注視センサ等の視線センサを用いてユーザの視線を検出することにより遮蔽対象部位を特定してもよい。
図20は、HMDセットにおいては、被遮蔽オブジェクトの遮蔽対象部位が遮蔽オブジェクトにより遮蔽されない視界画像(第1視界画像)を表示し、かつ、他のHMDセットにおいては、被遮蔽オブジェクトの遮蔽対象部位が遮蔽オブジェクトにより遮蔽される視界画像(第2視界画像)を表示する例を示す図である。図1に示すユーザ5に対応づけられたHMDセット110Aは、不図示の仮想カメラと被遮蔽オブジェクト8Aとの間に遮蔽オブジェクト8Cが配置される視界画像を生成し、当該視界画像における遮蔽オブジェクト8Cの位置情報PIを特定する。なお、位置情報PIは、遮蔽オブジェクト8Cの位置を示す情報であり、図20の例では、遮蔽オブジェクト8Cの外周を示しているが、これに限られず、遮蔽オブジェクト8Cの中心点等の座標情報であってもよい。
そして、HMDセット110Aは、図20に示すように、例えば、遮蔽オブジェクト8Cの表示形態を透明状態、つまり遮蔽オブジェクト8Cを非表示にした視界画像17EをHMD120Aにおいて表示する。なお、遮蔽オブジェクト8Cの表示形態に関して、被遮蔽オブジェクト8Aが視認できればよいので、遮蔽オブジェクト8Cの表示形態を透明状態にするのみならず、遮蔽オブジェクト8Cの表示形態を半透明状態にしたり、その他の表示形態を採用し得る。
また、HMDセット110Aは、他のユーザに対応づけられたHMDセットに対して、仮想カメラと被遮蔽オブジェクト8Aとの間に遮蔽オブジェクト8Cが配置される視界画像及び位置情報PIを送信する。よって、他のユーザに対応づけられたHMDセットのHMD120Bにおいては、仮想カメラと被遮蔽オブジェクト8Aとの間に遮蔽オブジェクト8Cが配置される視界画像17Fが表示される。なお、視界画像17Fは、HMD120Bではなく、ユーザ5以外の1又は複数のユーザが視認することができる他のディスプレイ装置において表示されてもよい。
この構成によれば、自身のHMDや表示装置において視界画像を表示する際には、ある仮想オブジェクトの特定部位について秘匿する必要がない場合であっても、他のユーザに対しては適切に秘匿することが可能である。
上記実施形態においては、HMDによってユーザが没入する仮想空間(VR空間)を例示して説明したが、HMDとして、透過型のHMDを採用してもよい。この場合、透過型のHMDを介してユーザが視認する現実空間に仮想空間を構成する画像の一部を合成した視界画像を出力することにより、拡張現実(AR:Augmented Reality)空間または複合現実(MR:Mixed Reality)空間における仮想体験をユーザに提供してもよい。この場合、操作オブジェクトに代えて、ユーザの手の動きに基づいて、仮想空間内における対象オブジェクトへの作用を生じさせてもよい。具体的には、プロセッサは、現実空間におけるユーザの手の位置の座標情報を特定するとともに、仮想空間内における対象オブジェクトの位置を現実空間における座標情報との関係で定義してもよい。これにより、プロセッサは、現実空間におけるユーザの手と仮想空間における対象オブジェクトとの位置関係を把握し、ユーザの手と対象オブジェクトとの間で上述したコリジョン制御等に対応する処理を実行可能となる。その結果、ユーザの手の動きに基づいて対象オブジェクトに作用を与えることが可能となる。