JP7094832B2 - 協調作業システム - Google Patents
協調作業システム Download PDFInfo
- Publication number
- JP7094832B2 JP7094832B2 JP2018156204A JP2018156204A JP7094832B2 JP 7094832 B2 JP7094832 B2 JP 7094832B2 JP 2018156204 A JP2018156204 A JP 2018156204A JP 2018156204 A JP2018156204 A JP 2018156204A JP 7094832 B2 JP7094832 B2 JP 7094832B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- route
- tractor
- vehicle
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005259 measurement Methods 0.000 claims description 25
- 230000002093 peripheral effect Effects 0.000 claims description 22
- 238000011144 upstream manufacturing Methods 0.000 claims description 19
- 238000010295 mobile communication Methods 0.000 description 18
- 238000004891 communication Methods 0.000 description 10
- 238000000034 method Methods 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 9
- 238000001514 detection method Methods 0.000 description 9
- 230000003028 elevating effect Effects 0.000 description 3
- 238000003971 tillage Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 244000025254 Cannabis sativa Species 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 238000009331 sowing Methods 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
Description
よって、無人トラクタの後方を走行する有人トラクタが、並走又は追走のいずれのモードであっても、最下流の直進経路の終端で停止中の無人トラクタが邪魔になり、有人トラクタが自身の予定走行経路の最下流の直進経路の終端まで進行して作業装置にて農作業を行うことが困難となる。
前記第1作業車両の後方を走行する第2作業車両と、
衛星測位システムにより位置情報を取得して、走行領域内の中央側領域に設定された複数の作業経路と、走行領域内の外周側領域に設定されて上流側の前記作業経路の終端から下流側の作業経路の始端へ走行案内する連結経路とを有する目標走行経路に沿って前記第1作業車両を自動走行させる自動走行制御部と、
前記目標走行経路における最下流の前記作業経路の終端から走行領域内の外周側領域に設定された退避位置へ走行案内する退避経路を設定する退避経路設定部と、が備えられ、
前記自動走行制御部は、前記第1作業車両が最下流の前記作業経路の終端に到達すると、前記退避経路に沿って前記第1作業車両を自動走行させるように構成され、
前記退避位置は、前記第1作業車両が、前記目標走行経路に応じて走行領域内に設定された予定走行経路の終端に到達した前記第2作業車両と干渉しない位置に設定されている点にある。
そして、自動走行制御部は、目標走行経路に沿って第1作業車両を自動走行させ、その第1作業車両が最下流の作業経路の終端に到達すると、退避経路に沿って第1作業車両を自動走行させることができるので、目標走行経路の最下流の作業経路の終端に到達した第1作業車両が、その後方を走行する後続の第2作業車両の走行の支障になるのを回避することができる。
よって、第1作業車両の後方を走行する第2作業車両が予定走行経路の終端まで進行して作業を行うことでき、第1作業車両と第2作業車両による協調作業を適切に行うことができる。
前記自動走行制御部は、前記第1作業車両が最下流の前記作業経路の終端に到達すると前記第1作業車両を一旦停止させ、前記距離測定部による測定距離が設定距離以下になると前記第1作業車両を前記退避経路に沿って自動走行させる点にある。
図1は、協調作業システムの概略構成を示しており、自動走行可能な複数台のトラクタ1(作業車両に相当する)を用い、前方側のトラクタ1A(第1作業車両に相当する)を無人で自動走行させ、且つ、後方側のトラクタ1B(第2作業車両に相当する)をユーザ等が運転して有人で手動走行させる状態で協調して作業を行っている場合を例示している。この協調作業システムにおいては、図1に示すように、作業車両としてトラクタ1を適用しているが、トラクタ以外の、田植機、コンバイン、草刈機、ホイールローダ、除雪車等の作業車両を適用することができる。なお、本実施形態では、複数台のトラクタ1A,1Bの構成は同一であるので、無人で自動走行させる前方側のトラクタ1Aを中心に説明する。
また、退避経路生成部56にて生成された退避経路PEは、表示部51に表示可能であり、車体データ及び圃場データ、目標走行経路PTの経路データ等と関連付けた退避経路PEの経路データとして端末記憶部54に記憶される。退避経路PEの経路データには、退避経路PEの方位角、及び、退避経路PEでのトラクタ1Aの走行形態等に応じて設定された設定エンジン回転速度や目標走行速度、等が含まれている。
また、この車載電子制御ユニット18は、トラクタ1Aが協調作業行うための協調作業モードに設定されている場合に、取得した経路データに基づいて、測位ユニット21にて自己の現在位置を取得しながら、目標走行経路PTに引き続き、退避経路PEに沿ってトラクタ1Aを自動走行させることができる。
測位ユニット21にて取得するトラクタ1Aの現在位置については、リアルタイム(例えば、数ミリ秒周期)でトラクタ1Aから携帯通信端末3に送信されており、携帯通信端末3にてトラクタ1Aの現在位置を把握している。
車載電子制御ユニット18が、測位ユニット21(衛星測位システムに相当する)により取得されるトラクタ1Aの測位情報に基づいて、走行領域R内の目標走行経路PTや退避経路PEに沿ってトラクタ1Aを自動走行させる自動走行制御を行う自動走行制御部として構成されている。
走行経路生成部53が目標走行経路PTを生成するに当たり、携帯通信端末3の表示部51に表示された目標走行経路設定用の入力案内に従って、運転者や管理者等のユーザ等が作業車両や作業装置12の種類や機種等の車体データを入力しており、入力された車体データが端末記憶部54に記憶されている。目標走行経路PTの生成対象となる走行領域R(図3参照)を圃場としており、携帯通信端末3の端末電子制御ユニット52は、圃場の形状や位置を含む圃場データを取得して端末記憶部54に記憶している。
図3に示すように、走行経路生成部53は、走行領域R内を中央側領域R1と外周側領域R2とに区分け設定している。中央側領域R1は、走行領域Rの中央部に設定されており、トラクタ1Aが所定の作業(例えば、耕耘等の作業)を行いながら往復方向に自動走行する作業領域となっている。外周側領域R2は、中央側領域R1の周囲に設定されており、トラクタ1Aが所定の作業を止めて方向転換を行う転回領域となっている。走行経路生成部53は、例えば、車体データに含まれる旋回半径やトラクタ1Aの前後幅及び左右幅等から、トラクタ1Aを圃場の畔際で旋回走行させるために必要となる旋回走行用のスペース等を求めている。走行経路生成部53は、旋回走行用のスペース等を外周側領域R2に確保するように、走行領域R内を中央側領域R1と外周側領域R2とに区分けしている。
この場合には、走行経路生成部53は、図4に示すように、車体データや圃場データ等を用いて、トラクタ1Aの斜め後方を併走する他の1台のトラクタ1Bと協調して作業を行うための目標走行経路PTを生成している。例えば、目標走行経路PTは、中央側領域R1において同じ直進距離を有して2台分の作業幅に対応する一定距離をあけて平行に配置設定された複数の作業経路PWと、外周側領域R2において隣接する作業経路PWの始端と終端とを連結する連結経路PCとを有している。なお、図4中の太点線は、トラクタ1Aの斜め後方を随伴して作業を行うトラクタ1Bの予定走行経路PPを表している。
ちなみに、図3及び図4に示す目標走行経路PTは、あくまで一例であり、どのような目標走行経路を設定するかは適宜変更が可能である。
ちなみに、一対のサイドマージンR22のうち、作業経路PWの並設方向で下流側(図中の右方側)のサイドマージンR22が、走行領域R内の外周側領域R2のうち、複数の作業経路の並設方向で、最下流の作業経路PWの外側の領域に該当する。
この退避経路PE1は、最下流の作業経路PWの終端p1から設定旋回半径L1で約1/4円弧に沿って左回りに旋回走行させてトラクタ1Aの走行方向を約90度転換する旋回経路P1と、その旋回経路P1の終端から設定距離L2だけ作業経路PWの並設方向の上流側(図中の左方側)に離れた退避位置p2に向かってトラクタ1Aを直進走行させる直進経路P2とから構成されている。
旋回経路P1の設定旋回半径L1は、トラクタ1Aの最小旋回半径以上に設定されており、直進経路P2の設定距離L2は、トラクタ1Aの後方の作業装置12(図1参照)が、旋回経路P1から外れて直進経路P2に移行する距離以上に設定されている。そのため、作業装置12が旋回経路P1を旋回している途中の不安定な姿勢で、トラクタ1Aが退避位置p2に到達して走行停止してしまうことを防止することができる。
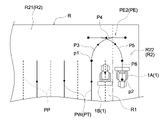
退避経路PE2における退避位置p2は、トラクタ1Aの後方を走行するトラクタ1Bの予定走行経路PPが設定されていないサイドマージンR22内に位置し、且つ、予定走行経路PPの最下流の作業経路(図中右端の作業経路)を走行中の後続のトラクタ1Bと干渉せずにすれ違えるだけ、予定走行経路PPの最下流の作業経路から外側に離間した位置であるので、予定走行経路PPの終端よりも上流側を走行中の後続のトラクタ1Bと干渉しない位置となっている。このとき、退避位置p2に位置するトラクタ1Aの向きと予定走行経路PPの最下流の作業経路を走行中の後続のトラクタBの向きとは反対側となる。
この退避経路PE2は、最下流の作業経路PWの終端p1から右方側のサイドマージンR22に進入しながらトラクタ1Aの走行方向を約180度転換する転回経路P3~P5と、その転回経路P3~P5の終端から所定距離だけ後方側(図中下方側)に移動した退避位置p2に向かってトラクタ1Aを直線走行させる直進経路P6とから構成されている。
直進経路P6も、当該経路を走行中のトラクタ1Aが、予定走行経路PPの最下流の作業経路(図中右端の作業経路)を走行中の後続のトラクタ1Bと干渉せずにすれ違えるだけ、予定走行経路PPの最下流の作業経路から外側に離間した位置に設定されている。
退避経路PE3における退避位置p2も、トラクタ1Aの後方を走行するトラクタ1Bの予定走行経路PPが設定されていないサイドマージンR22内に位置し、且つ、予定走行経路PPの最下流の作業経路を走行中の後続のトラクタ1Bとすれ違うことがない位置であるので、予定走行経路PPの終端よりも上流側を走行中のトラクタ1Bと干渉しない位置となっている。
この退避経路PE3は、最下流の作業経路PWの終端p1から右方側のサイドマージンR22に向けて約1/4円弧に沿って右回りに旋回走行させてトラクタ1Aの走行方向を約90度転換する旋回経路P7と、その旋回経路P7の終端から所定距離だけ右方側に移動した退避位置p2に向かってトラクタ1Aを直進走行させる直進経路P8とから構成されている。
この退避経路PE4は、最下流の作業経路PWの終端p1から、最下流の作業経路PWの下流側(図中上側)の枕地領域R21、作業経路PWの並設方向の上流側(図中左側)のサイドマージンR22、最上流の作業経路PWの上流側(図中下側)の枕地領域R21を左回りに順に走行させて退避位置p2(スタート地点S)に至る経路として構成されている。
なお、トラクタ1Aの自動走行を開始させるスタート地点Sは、目標走行経路PTの最上流側の地点に限らず、走行領域R内においてユーザ等がトラクタ1Aの自動走行の開始を希望する任意の地点に設定することができる。
ちなみに、図5~図8に示す退避経路PE1~PE4も、あくまで一例であり、どのような退避経路を設定するかは適宜変更が可能である。
なお、トラクタ1Bの高さは、例えば、ユーザ等が、トラクタ1Aの表示部や携帯通信端末3の表示部51等の表示装置に表示させる設定画面等を操作してトラクタ1Bの車両種別等を入力すると、その車両種別に対応付けられた高さをテーブル等から読み出し、その読み出した高さを後続のトラクタ1Bの高さに設定することができる。
また、距離測定部112は、後ライダーセンサ102の測定情報ではなく、例えば、後カメラ109の撮像画像等の他の情報に基づいて後方側のトラクタ1Bまでの距離を測定する距離測定処理を行うように構成されていてもよい。
本発明の他の実施形態について説明する。
尚、以下に説明する各実施形態の構成は、夫々単独で適用することに限らず、他の実施形態の構成と組み合わせて適用することも可能である。
また、例えば、車載電子制御ユニット18は、トラクタ1Aが最下流の作業経路PWの終端p1に到達するとトラクタ1Aを一旦停止させ、後方側のトラクタ1Bに搭乗するユーザ等の携帯通信端末3の操作により、携帯通信端末3からトラクタ1Aに対して自動走行を許可する指示が送信されて当該指示をトラクタ1Aが受信すると、トラクタ1Aを退避経路PE3に沿って自動走行させるように構成されていてもよい。
例えば、作業車両は、エンジン9と走行用の電動モータとを備えるハイブリット仕様に構成されていてもよく、また、エンジン9に代えて走行用の電動モータを備える電動仕様に構成されていてもよい。
例えば、作業車両は、走行部として、左右の後輪6に代えて左右のクローラを備えるセミクローラ仕様に構成されていてもよい。
例えば、作業車両は、左右の後輪6が操舵輪として機能する後輪ステアリング仕様に構成されていてもよい。
1A トラクタ(第1作業車両)
1B トラクタ(第2作業車両)
18 車載電子制御ユニット(自動走行制御部)
56 退避経路生成部
112 距離測定部
R 走行領域
R1 中央側領域
R2 外周側領域
R21 枕地領域
R22 サイドマージン
PT 目標走行経路
PW 作業経路
PC 連結経路
PE 退避経路
PE1 退避経路
PE2 退避経路
PE3 退避経路
p1 最下流の作業経路の終端
p2 退避位置
PP 予定走行経路
Ds 設定距離
Dt 測定距離
Claims (5)
- 走行領域内を自動走行する第1作業車両と、
前記第1作業車両の後方を走行する第2作業車両と、
走行領域内の中央側領域に設定された複数の作業経路と、走行領域内の外周側領域に設定されて上流側の前記作業経路の終端から下流側の作業経路の始端へ走行案内する連結経路とを有する目標走行経路に沿って前記第1作業車両を自動走行させる自動走行制御部と、
前記目標走行経路における最下流の前記作業経路の終端から走行領域内の外周側領域に設定された退避位置へ走行案内する退避経路を設定する退避経路設定部と、
前記第1作業車両と前記第2作業車両との距離を測定する距離測定部と、が備えられ、
前記退避位置は、前記第1作業車両が、前記目標走行経路に応じて走行領域内に設定された予定走行経路の終端に到達した前記第2作業車両と干渉しない位置に設定され、
前記自動走行制御部は、前記第1作業車両が最下流の前記作業経路の終端に到達すると前記第1作業車両を一旦停止させ、前記距離測定部による測定距離が設定距離以下になると前記第1作業車両を前記退避経路に沿って自動走行させる協調作業システム。 - 前記退避位置は、前記第1作業車両が、前記予定走行経路の終端よりも上流側を走行中の前記第2作業車両と干渉しない位置に設定されている請求項1記載の協調作業システム。
- 前記退避位置は、走行領域内の前記外周側領域のうち、並列状に設定された複数の前記作業経路の並設方向で、最下流の前記作業経路の外側の領域内に設定されている請求項1又は2記載の協調作業システム。
- 前記退避位置は、前記自動走行制御部が前記第1作業車両の自動走行を開始させるスタート地点に設定されている請求項1~3のいずれか1項に記載の協調作業システム。
- 前記自動走行制御部は、前記第1作業車両が最下流の前記作業経路の終端に到達した時点で前記距離測定部による測定距離が前記設定距離以下であれば、前記第1作業車両を一旦停止させずに前記退避経路に沿って自動走行させる請求項1~4のいずれか1項に記載の協調作業システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018156204A JP7094832B2 (ja) | 2018-08-23 | 2018-08-23 | 協調作業システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018156204A JP7094832B2 (ja) | 2018-08-23 | 2018-08-23 | 協調作業システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020028259A JP2020028259A (ja) | 2020-02-27 |
| JP7094832B2 true JP7094832B2 (ja) | 2022-07-04 |
Family
ID=69622256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018156204A Active JP7094832B2 (ja) | 2018-08-23 | 2018-08-23 | 協調作業システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7094832B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004008053A (ja) | 2002-06-05 | 2004-01-15 | Yanmar Agricult Equip Co Ltd | 農業用作業車 |
| US20150319913A1 (en) | 2014-05-11 | 2015-11-12 | Cnh Industrial America Llc | Mission control system and method for an agricultural system |
| JP2017167910A (ja) | 2016-03-17 | 2017-09-21 | ヤンマー株式会社 | 作業車両および作業経路生成装置 |
| JP2017199107A (ja) | 2016-04-26 | 2017-11-02 | ヤンマー株式会社 | 作業車両制御システム |
| JP2018117566A (ja) | 2017-01-24 | 2018-08-02 | 株式会社クボタ | 走行経路生成システム |
-
2018
- 2018-08-23 JP JP2018156204A patent/JP7094832B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004008053A (ja) | 2002-06-05 | 2004-01-15 | Yanmar Agricult Equip Co Ltd | 農業用作業車 |
| US20150319913A1 (en) | 2014-05-11 | 2015-11-12 | Cnh Industrial America Llc | Mission control system and method for an agricultural system |
| JP2017167910A (ja) | 2016-03-17 | 2017-09-21 | ヤンマー株式会社 | 作業車両および作業経路生成装置 |
| JP2017199107A (ja) | 2016-04-26 | 2017-11-02 | ヤンマー株式会社 | 作業車両制御システム |
| JP2018117566A (ja) | 2017-01-24 | 2018-08-02 | 株式会社クボタ | 走行経路生成システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020028259A (ja) | 2020-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6975668B2 (ja) | 作業車両用の自動走行システム | |
| KR102380578B1 (ko) | 작업 차량 제어 시스템 | |
| WO2021006321A1 (ja) | 自動走行システム | |
| JP7044664B2 (ja) | 自動走行システム | |
| JP2021185366A (ja) | 障害物検知システム | |
| WO2019187884A1 (ja) | 作業車両の自動走行装置 | |
| WO2019187883A1 (ja) | 作業車両用の障害物検知システム | |
| JP6986430B2 (ja) | 走行経路設定装置 | |
| JP2024053067A (ja) | 自動走行システム及び自動走行方法 | |
| JP7100539B2 (ja) | 自動走行システム | |
| JP7016747B2 (ja) | 協調作業システム | |
| WO2021010297A1 (ja) | 自動走行システム | |
| JP7094832B2 (ja) | 協調作業システム | |
| JP7223552B2 (ja) | 表示装置、及び、自動走行システム | |
| JP7036707B2 (ja) | 走行経路生成装置 | |
| JP7094833B2 (ja) | 走行経路表示装置 | |
| WO2021020333A1 (ja) | 自動走行システム | |
| JP7068969B2 (ja) | 自動走行システム | |
| JP7329645B2 (ja) | 作業支援システム | |
| EP3901722B1 (en) | Travel state display device and automated travel system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20200814 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220614 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220622 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7094832 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |