JP7068260B2 - データ処理を優先順位付けするシステム及び方法 - Google Patents
データ処理を優先順位付けするシステム及び方法 Download PDFInfo
- Publication number
- JP7068260B2 JP7068260B2 JP2019229146A JP2019229146A JP7068260B2 JP 7068260 B2 JP7068260 B2 JP 7068260B2 JP 2019229146 A JP2019229146 A JP 2019229146A JP 2019229146 A JP2019229146 A JP 2019229146A JP 7068260 B2 JP7068260 B2 JP 7068260B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- data
- current
- sensor data
- processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 145
- 238000000034 method Methods 0.000 title claims description 51
- 230000009471 action Effects 0.000 claims description 55
- 230000008569 process Effects 0.000 claims description 42
- 238000003672 processing method Methods 0.000 claims description 22
- 230000004044 response Effects 0.000 claims description 15
- 238000012913 prioritisation Methods 0.000 claims description 14
- 230000005540 biological transmission Effects 0.000 claims description 11
- 230000006399 behavior Effects 0.000 claims description 8
- 230000001960 triggered effect Effects 0.000 claims description 7
- 238000004891 communication Methods 0.000 description 16
- 230000033001 locomotion Effects 0.000 description 13
- 238000012423 maintenance Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 230000003068 static effect Effects 0.000 description 6
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000007257 malfunction Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000006378 damage Effects 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000013439 planning Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000001303 quality assessment method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/48—Program initiating; Program switching, e.g. by interrupt
- G06F9/4806—Task transfer initiation or dispatching
- G06F9/4812—Task transfer initiation or dispatching by interrupt, e.g. masked
- G06F9/4831—Task transfer initiation or dispatching by interrupt, e.g. masked with variable priority
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0223—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving speed control of the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/48—Program initiating; Program switching, e.g. by interrupt
- G06F9/4806—Task transfer initiation or dispatching
- G06F9/4843—Task transfer initiation or dispatching by program, e.g. task dispatcher, supervisor, operating system
- G06F9/4881—Scheduling strategies for dispatcher, e.g. round robin, multi-level priority queues
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/50—Allocation of resources, e.g. of the central processing unit [CPU]
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Health & Medical Sciences (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Business, Economics & Management (AREA)
- Multimedia (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
車両データ処理システムであって、
車両に搭載状態において配置され、運転イベントデータを検出及びキャプチャするべく動作可能である、センサのグループと、
センサのグループに結合され、センサのグループから、運転イベントデータを示す1つ又は複数のデータストリームを受け取るべく動作可能である、コントローラと、
を有し、
コントローラは、
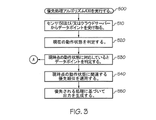
1つ又は複数のデータストリームを分析し、
1つ又は複数のデータストリームに基づいて車両の現時点の動作状態を判定し、
車両の現時点の動作状態が、1つ又は複数のデータストリームの優先される処理をトリガしているかどうかを判定し、
優先される処理がトリガされている、という判定の際に、優先される処理を適用する、
べく、更に動作可能である。
〔例2〕
例1の車両データ処理システムであって、現時点の動作状態は、衝突の回避又は運動する物体の追跡、或いは、これらの両方を示している。
〔例3〕
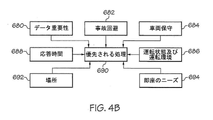
例1の車両データ処理システムであって、現時点の動作状態は、車両の速度、車両の場所、運転環境、又はこれらの組合せを示している。
〔例4〕
例1の車両データ処理システムであって、現時点の動作状態は、自律型車両の動作の次のシーケンスを示している。
〔例5〕
例1の車両データ処理システムであって、コントローラは、
1つ又は複数のデータストリームの第1の組に基づいて車両の第1運転イベントを判定し、
1つ又は複数のデータストリームの第2の組に基づいて車両の第2運転イベントを判定し、且つ、
車両の現時点の動作状態に基づいて第1運転イベントと第2運転イベントの間の優先順位を判定する、
べく、更に動作可能である。
〔例6〕
例5の車両データ処理システムであって、コントローラは、
車両の現時点の動作状態が変化するのに伴って、第1運転イベントと第2運転イベントの間の優先順位を調節するべく、更に動作可能である。
〔例7〕
例6の車両データ処理システムであって、コントローラは、
演算リソースが利用可能である際に、優先順位が引き下げられた運転イベントの1つ又は複数のデータストリームを処理するべく、更に動作可能である。
〔例8〕
車両データ処理システムであって、
車両の運転イベントに関係する1つ又は複数のデータポイントを収集する複数のセンサと、
複数のセンサに結合され、1つ又は複数のデータポイントを受け取るべく動作可能である、プロセッサであって、1つ又は複数のデータポイントに基づいて車両の現時点のアクションを判定するべく更に動作可能であるプロセッサと、
プロセッサに結合され、状態マネージャプロブラムと、現在の基準点の前のセンサデータの組を保存するためのセンサデータキューと、を保存するメモリと、
を有し、
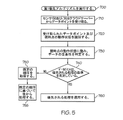
プロセッサによる実行の際に、状態マネージャプログラムは、プロセッサが、車両の現時点のアクションに基づいて、現在の基準点において複数のセンサによって収集されている現在のセンサデータと、センサデータキュー内においてキューイングされているセンサデータの組と、を優先順位付け及び処理するようにしている。
〔例9〕
例8の車両データ処理システムであって、プロセッサは、車両の現時点のアクションが変化するのに伴って、現在のセンサデータ及びセンサデータの組を再優先順序付けするべく、更に動作可能である。
〔例10〕
例9の車両データ処理システムであって、プロセッサは、車両の現時点のアクションが静止型のアクションに変化した際に、より低い優先順位によってキューイングされているセンサデータの組を処理するべく、更に動作可能である。
〔例11〕
例9の車両データ処理システムであって、プロセッサは、演算リソースが利用可能である際に、より低い優先順位によってキューイングされているセンサデータの組を処理するべく、更に動作可能である。
〔例12〕
例8の車両データ処理システムであって、プロセッサは、車両の現時点のアクションによって必要とされている1つ又は複数のデータポイントの処理を優先順位付けするべく、更に動作可能である。
〔例13〕
例8の車両データ処理システムであって、プロセッサは、車両の現時点のアクションに基づいて、現在のセンサデータ及びセンサデータキュー内において保存されているセンサデータの組の1つ又は複数のものの優先順位を引き下げるべく、更に動作可能である。
〔例14〕
車両データ処理方法であって、
車両の運転イベントに関係する1つ又は複数のデータポイントを複数のセンサによって収集することと、
現在の基準点の前に収集されたセンサデータの組をセンサデータキュー内において保存することと、
複数のセンサから、1つ又は複数のデータポイントをプロセッサにおいて受け取ることと、
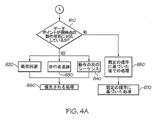
1つ又は複数のデータポイントに基づいて車両の現時点のアクションを判定することと、
車両の現時点のアクションに基づいて、現在の基準点において複数のセンサによって収集されている現在のセンサデータと、センサデータキュー内においてキューイングされているセンサデータの組と、をプロセッサにより、優先順位付け及び処理することと、
を有する。
〔例15〕
例14の車両データ処理方法であって、
車両の現時点のアクションが変化するのに伴って、現在のセンサデータ及びセンサデータの組を再優先順位付けすることを更に有する。
〔例16〕
例14の車両データ処理方法であって、
車両の現時点のアクションが静止型のアクションに変化した際に、より低い優先順位によってキューイングされているセンサデータの組を処理することを更に有する。
〔例17〕
例15の車両データ処理方法であって、
演算リソースが利用可能である際に、より低い優先順位によってキューイングされているセンサデータの組を処理することを更に有する。
〔例18〕
例14の車両データ処理方法であって、
車両の現時点のアクションによって必要とされている1つ又は複数のデータポイントの処理を優先順位付けすることを更に有する。
〔例19〕
例14の車両データ処理方法であって、
車両の現時点のアクションに基づいて、現在のセンサデータ及びセンサデータキュー内に保存されているセンサデータの組の1つ又は複数のものの優先順位を引き下げることを更に有する。
〔例20〕
例14の車両データ処理方法であって、
1つ又は複数のデータポイントの第1の組に基づいて車両の第1運転イベントを判定することと、
1つ又は複数のデータポイントの第2の組に基づいて車両の第2運転イベントを判定することと、
車両の現時点の動作状態に基づいて第1運転イベントと第2運転イベントの間の優先順位を判定することと、
を更に有する。
Claims (14)
- 車両データ処理システムであって、
車両に搭載状態において配置され、運転イベントデータを検出及びキャプチャするべく動作可能である、センサのグループと、
前記センサのグループに結合され、前記センサのグループから、前記運転イベントデータを示す1つ又は複数のデータストリームを受け取るべく動作可能である、コントローラと、
を有し、
前記コントローラは、
前記1つ又は複数のデータストリームを分析し、
前記1つ又は複数のデータストリームに基づいて前記車両の現時点の動作状態を判定し、
前記車両の現時点の動作状態が前記1つ又は複数のデータストリームの優先される処理をトリガしているかどうかを判定し、
前記優先される処理がトリガされている、という判定の際に、前記優先される処理を適用するべく、更に動作可能であり、
前記優先される処理を適用することは、現在の基準点における第1運転イベントに対応する第1のデータストリームを、現在の基準点における第2運転イベントに対応する第2のデータストリームよりも前に処理することを含み、前記優先される処理が、それぞれの結果を得るために前記第1のデータストリームおよび前記第2のデータストリームを処理するそれぞれの時間に基づいており、
前記コントローラは更に、
前記車両の現時点の動作状態に基づいて前記第1運転イベントと前記第2運転イベントの間の優先順位を判定するべく、動作可能であり、
前記車両の現時点の動作状態が変化するのに伴って、前記第1運転イベントと前記第2運転イベントの間の前記優先順位を調節するべく、動作可能であり、
演算リソースが利用可能である際に、優先順位が引き下げられた運転イベントの前記1つ又は複数のデータストリームを処理するべく、動作可能である、
車両データ処理システム。 - 前記現時点の動作状態は、衝突の回避、運動する物体の追跡、又はこれらの両方を示す、請求項1に記載の車両データ処理システム。
- 前記現時点の動作状態は、前記車両の速度、前記車両の場所、運転環境、又はこれらの組合せを示す、請求項1に記載の車両データ処理システム。
- 前記現時点の動作状態は、自律型車両の動作の次のシーケンスを示す、請求項1に記載の車両データ処理システム。
- 前記優先される処理は、前記第1のデータストリームおよび前記第2のデータストリームの非搭載状態での送信から、前記第1のデータストリームおよび前記第2のデータストリームの非搭載状態での送信に応答してそれぞれの結果を受信するまでのそれぞれの応答時間にさらに基づいている、請求項1に記載の車両データ処理システム。
- 車両データ処理システムであって、
車両の運転イベントに関係する1つ又は複数のデータポイントを収集する複数のセンサと、
前記複数のセンサに結合され、前記1つ又は複数のデータポイントを受け取るべく動作可能である、プロセッサであって、前記1つ又は複数のデータポイントに基づいて前記車両の現時点のアクションを判定するべく更に動作可能であるプロセッサと、
前記プロセッサに結合され、状態マネージャプログラムと、現在の基準点の前のセンサデータの組を保存するためのセンサデータキューと、を保存する、メモリと、
を有し、
前記プロセッサによる実行の際に、前記状態マネージャプログラムは、前記プロセッサが、前記車両の現時点のアクションに基づいて、前記現在の基準点において前記複数のセンサによって収集されている現在のセンサデータと、前記センサデータキュー内においてキューイングされている前記センサデータの組と、を優先順位付け及び処理するようにしており、
前記優先順位付けおよび処理は、前記車両の現在の行動に基づいて、前記センサデータキューにキューイングされているセンサデータの組よりも前に、前記現在の基準点において前記複数のセンサによって収集されている現在のセンサデータを優先して処理することを含み、
前記優先順位付けおよび処理は、第1のデータストリームおよび第2のデータストリームを処理してそれぞれの結果を得るためのそれぞれの時間に基づいており、
前記プロセッサが更に、
前記車両の現時点のアクションが変化するのに伴って、前記現在のセンサデータ及び前記センサデータの組を再優先順位付けするようにし、
前記車両の現時点のアクションが静止型のアクションに変化した際に、より低い優先順位によってキューイングされている前記センサデータの組を処理するようにし、
演算リソースが利用可能である際に、より低い優先順位によってキューイングされている前記センサデータの組を処理するようにしている、
車両データ処理システム。 - 前記プロセッサは、前記車両の現時点のアクションによって必要とされている前記1つ又は複数のデータポイントの処理を優先順位付けするべく、更に動作可能である、請求項6に記載の車両データ処理システム。
- 前記プロセッサは、前記車両の現時点のアクションに基づいて、前記現在のセンサデータ及び前記センサデータキュー内に保存されている前記センサデータの組の1つ又は複数のものの優先順位を引き下げるべく、更に動作可能である、請求項6に記載の車両データ処理システム。
- 前記優先順位付け及び処理は、前記第1のデータストリームおよび前記第2のデータストリームの非搭載状態での送信から、前記第1のデータストリームおよび前記第2のデータストリームの非搭載状態での送信に応答してそれぞれの結果を受信するまでのそれぞれの応答時間にさらに基づいている、請求項6に記載の車両データ処理システム。
- 車両データ処理方法であって、
車両の運転イベントに関係する1つ又は複数のデータポイントを複数のセンサによって収集することと、
現在の基準点の前に収集されたセンサデータの組をセンサデータキュー内において保存することと、
前記複数のセンサから、1つ又は複数のデータポイントをプロセッサにおいて受け取ることと、
前記1つ又は複数のデータポイントに基づいて前記車両の現時点のアクションを判定することと、
前記車両の現時点のアクションに基づいて、前記現在の基準点において前記複数のセンサによって収集されている現在のセンサデータと、前記センサデータキュー内においてキューイングされている前記センサデータの組と、を前記プロセッサにより、優先順位付け及び処理することと、
を有し、
前記優先順位付けおよび処理は、前記車両の現在の行動に基づいて、前記センサデータキューにキューイングされているセンサデータの組よりも前に、前記現在の基準点において前記複数のセンサによって収集されている現在のセンサデータを優先して処理することを含み、
前記優先順位付けおよび処理は、第1のデータストリームおよび第2のデータストリームを処理してそれぞれの結果を得るためのそれぞれの時間に基づいており、
前記車両データ処理方法は更に、
前記車両の現時点のアクションが変化するのに伴って、前記現在のセンサデータ及び前記センサデータの組を再優先順位付けすることと、
前記現在のセンサデータおよび前記センサデータの組の更なる優先順位付けおよび処理することであって、前記更なる優先順位付けおよび処理が、前記センサデータキューにキューイングされている前記センサデータの組を処理するための異なる時間量と比較して、前記現在のセンサデータを処理するための時間量に基づいている、更なる優先順位付けおよび処理することと、
前記車両の現時点のアクションが静止型のアクションに変化した際に、より低い優先順位によってキューイングされている前記センサデータの組を処理することと、
演算リソースが利用可能である際に、より低い優先順位によってキューイングされている前記センサデータの組を処理することと、
を有する、車両データ処理方法。 - 前記車両の現時点のアクションによって必要とされている前記1つ又は複数のデータポイントの処理を優先順位付けすることを更に有する、請求項10に記載の車両データ処理方法。
- 前記車両の現時点のアクションに基づいて前記現在のセンサデータ及び前記センサデータキュー内において保存されている前記センサデータの組の1つ又は複数のものの優先順位を引き下げることを更に有する、請求項10に記載の車両データ処理方法。
- 前記1つ又は複数のデータポイントの第1の組に基づいて前記車両の第1運転イベントを判定することと、
前記1つ又は複数のデータポイントの第2の組に基づいて前記車両の第2運転イベントを判定することと、
前記車両の現時点のアクションに基づいて前記第1運転イベントと前記第2運転イベントの間の優先順位を判定することと、
を更に有する、請求項10に記載の車両データ処理方法。 - 前記優先順位付けおよび処理は、前記第1のデータストリームおよび前記第2のデータストリームの非搭載状態での送信から、前記第1のデータストリームおよび前記第2のデータストリームの非搭載状態での送信に応答してそれぞれの結果を受信するまでのそれぞれの応答時間にさらに基づいている、請求項10に記載の車両データ処理方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/227,787 US11042159B2 (en) | 2018-12-20 | 2018-12-20 | Systems and methods for prioritizing data processing |
| US16/227,787 | 2018-12-20 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020125098A JP2020125098A (ja) | 2020-08-20 |
| JP2020125098A5 JP2020125098A5 (ja) | 2021-10-21 |
| JP7068260B2 true JP7068260B2 (ja) | 2022-05-16 |
Family
ID=71097647
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019229146A Active JP7068260B2 (ja) | 2018-12-20 | 2019-12-19 | データ処理を優先順位付けするシステム及び方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11042159B2 (ja) |
| JP (1) | JP7068260B2 (ja) |
| CN (1) | CN111353375A (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11042153B2 (en) * | 2018-12-21 | 2021-06-22 | Zoox, Inc. | Adaptive multi-network vehicle architecture |
| US20190318257A1 (en) * | 2019-06-28 | 2019-10-17 | Helen Adrienne Frances Gould | Assessment and response mechanism for autonomous systems |
| US11526175B1 (en) * | 2019-09-30 | 2022-12-13 | Aurora Operations, Inc. | Sensor data prioritization for autonomous vehicle based on vehicle operation data |
| US11550322B1 (en) | 2019-09-30 | 2023-01-10 | Aurora Operations, Inc. | External environment sensor data prioritization for autonomous vehicle |
| US20210362749A1 (en) * | 2020-05-20 | 2021-11-25 | Gm Cruise Holdings Llc | Hardware accelerated network interface for an autonomous vehicle switched-network |
| CN114521026A (zh) * | 2020-11-20 | 2022-05-20 | 辰芯科技有限公司 | 通信数据调度处理方法、装置、计算机设备及存储介质 |
| CN113344345A (zh) * | 2021-05-21 | 2021-09-03 | 深圳裹动智驾科技有限公司 | 用于自动驾驶车辆的数据处理方法、装置及计算机设备 |
| US20220388534A1 (en) * | 2021-06-02 | 2022-12-08 | Argo AI, LLC | Method and system for predicting behavior of actors in an environment of an autonomous vehicle |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006134232A (ja) | 2004-11-09 | 2006-05-25 | Toyota Motor Corp | 車両用立体物検出装置 |
| JP2017161998A (ja) | 2016-03-07 | 2017-09-14 | トヨタ自動車株式会社 | 車両用画像生成装置 |
| JP2018036796A (ja) | 2016-08-30 | 2018-03-08 | 日立オートモティブシステムズ株式会社 | 外界情報処理装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7146260B2 (en) | 2001-04-24 | 2006-12-05 | Medius, Inc. | Method and apparatus for dynamic configuration of multiprocessor system |
| JP4613741B2 (ja) * | 2005-08-05 | 2011-01-19 | トヨタ自動車株式会社 | 車両用データ記録装置 |
| JP5147874B2 (ja) | 2010-02-10 | 2013-02-20 | 日立オートモティブシステムズ株式会社 | 車載画像処理装置 |
| US8923147B2 (en) | 2011-10-03 | 2014-12-30 | Qualcomm Incorporated | Method and apparatus for filtering and processing received vehicle peer transmissions based on reliability information |
| US9147336B2 (en) | 2012-02-29 | 2015-09-29 | Verizon Patent And Licensing Inc. | Method and system for generating emergency notifications based on aggregate event data |
| GB2523351B (en) | 2014-02-21 | 2017-05-10 | Jaguar Land Rover Ltd | Automatic recognition and prioritised output of roadside information |
| DE102015000894A1 (de) * | 2015-01-23 | 2016-07-28 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Elektronisches Parkbremssystem mit externer Ansteuerung |
| US10029698B2 (en) * | 2016-07-19 | 2018-07-24 | Futurewei Technologies, Inc. | Adaptive passenger comfort enhancement in autonomous vehicles |
| US10114374B2 (en) * | 2016-11-16 | 2018-10-30 | Baidu Usa Llc | Emergency handling system for an autonomous driving vehicle (ADV) |
| KR20180094725A (ko) * | 2017-02-16 | 2018-08-24 | 삼성전자주식회사 | 자율 주행을 위한 차량 제어 방법, 차량 제어 장치 및 자율 주행을 위한 학습 방법 |
| CN108834425B (zh) * | 2017-03-03 | 2021-07-20 | 百度时代网络技术(北京)有限公司 | 用于控制自动驾驶车辆进入自动驾驶模式的方法及系统 |
| US10257582B2 (en) * | 2017-03-17 | 2019-04-09 | Sony Corporation | Display control system and method to generate a virtual environment in a vehicle |
| US11373552B2 (en) * | 2017-08-17 | 2022-06-28 | Virginia Commonwealth University | Anatomically accurate brain phantoms and methods for making and using the same |
| US10948919B2 (en) * | 2017-09-11 | 2021-03-16 | Baidu Usa Llc | Dynamic programming and gradient descent based decision and planning for autonomous driving vehicles |
| US10782684B2 (en) * | 2018-04-20 | 2020-09-22 | Lyft, Inc. | Secure communication between vehicle components via bus guardians |
| US10328947B1 (en) * | 2018-04-20 | 2019-06-25 | Lyft, Inc. | Transmission schedule segmentation and prioritization |
| US11403517B2 (en) * | 2018-09-27 | 2022-08-02 | Intel Corporation | Proximity-based distributed sensor processing |
-
2018
- 2018-12-20 US US16/227,787 patent/US11042159B2/en active Active
-
2019
- 2019-12-19 JP JP2019229146A patent/JP7068260B2/ja active Active
- 2019-12-20 CN CN201911321331.4A patent/CN111353375A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006134232A (ja) | 2004-11-09 | 2006-05-25 | Toyota Motor Corp | 車両用立体物検出装置 |
| JP2017161998A (ja) | 2016-03-07 | 2017-09-14 | トヨタ自動車株式会社 | 車両用画像生成装置 |
| JP2018036796A (ja) | 2016-08-30 | 2018-03-08 | 日立オートモティブシステムズ株式会社 | 外界情報処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111353375A (zh) | 2020-06-30 |
| US11042159B2 (en) | 2021-06-22 |
| US20200201325A1 (en) | 2020-06-25 |
| JP2020125098A (ja) | 2020-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7068260B2 (ja) | データ処理を優先順位付けするシステム及び方法 | |
| US20190370581A1 (en) | Method and apparatus for providing automatic mirror setting via inward facing cameras | |
| US11250335B2 (en) | Joint processing for embedded data inference | |
| JP7338637B2 (ja) | 交通支援システム、サーバ及び方法、車載装置及びその動作方法、コンピュータプログラム、記録媒体、コンピュータ、並びに半導体集積回路 | |
| JP2022009142A (ja) | 自律車両の軌道修正のための遠隔操作システムおよび方法 | |
| US11566904B2 (en) | Map change detection | |
| JP2021524087A (ja) | V2xおよびセンサデータを使用するためのシステムおよび方法 | |
| JP2023533225A (ja) | 自律走行車ポリシーを動的にキュレーションする方法及びシステム | |
| JP2022091936A (ja) | 車路協同自動運転の制御方法、装置、電子機器及び車両 | |
| US11398150B2 (en) | Navigation analysis for a multi-lane roadway | |
| JP2021180016A (ja) | クラウドコントロールプラットフォームに用いるイベント検出方法、装置、設備、記憶媒体、及びプログラム | |
| WO2020231480A1 (en) | Map updates based on data captured by an autonomous vehicle | |
| JP2023529959A (ja) | 離脱予測とトリアージ支援のためのシステムと方法 | |
| US20220198839A1 (en) | Distributed data processing task allocation systems and methods for autonomous vehicles | |
| US20230415753A1 (en) | On-Vehicle Driving Behavior Modelling | |
| US11913791B2 (en) | Crosswalk detection | |
| JP2022058611A (ja) | 運転者及び乗客用の車載音響監視システム | |
| KR20180068462A (ko) | 신호등 제어 시스템 및 방법 | |
| KR102562381B1 (ko) | 차량 호라이즌에서 오브젝트를 컨텍스트화 하기 위한 시스템 및 방법 | |
| EP4071728A1 (en) | Artificial intelligence model integration and deployment for providing a service | |
| WO2022136734A1 (en) | Distributed data processing task allocation systems and methods for autonomous vehicles | |
| KR20230120642A (ko) | 동시 실행 뉴럴 네트워크들에의 프로세싱 자원들의 배정 | |
| EP4202476A1 (en) | Anomaly prioritization using dual-mode adaptive radar | |
| CN113276863B (zh) | 车辆控制方法、装置、设备、介质及程序产品 | |
| JP7363831B2 (ja) | 情報収集制御装置、情報収集制御方法、情報収集制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210907 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210907 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210907 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7068260 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |