JP6978552B2 - 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 - Google Patents
動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 Download PDFInfo
- Publication number
- JP6978552B2 JP6978552B2 JP2020114144A JP2020114144A JP6978552B2 JP 6978552 B2 JP6978552 B2 JP 6978552B2 JP 2020114144 A JP2020114144 A JP 2020114144A JP 2020114144 A JP2020114144 A JP 2020114144A JP 6978552 B2 JP6978552 B2 JP 6978552B2
- Authority
- JP
- Japan
- Prior art keywords
- motion vector
- control point
- difference
- affine
- picture block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/521—Processing of motion vectors for estimating the reliability of the determined motion vectors or motion vector field, e.g. for smoothing the motion vector field or for correcting motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
- H04N19/139—Analysis of motion vectors, e.g. their magnitude, direction, variance or reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/172—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a picture, frame or field
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/189—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding
- H04N19/196—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding being specially adapted for the computation of encoding parameters, e.g. by averaging previously computed encoding parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/53—Multi-resolution motion estimation; Hierarchical motion estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/537—Motion estimation other than block-based
- H04N19/54—Motion estimation other than block-based using feature points or meshes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/57—Motion estimation characterised by a search window with variable size or shape
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
- H04N19/82—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation involving filtering within a prediction loop
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Theoretical Computer Science (AREA)
- Computing Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
第1制御点および第2制御点の動きベクトルどうしの第1水平成分差分および第1垂直成分差分を求めることは、第1制御点の動きベクトルの水平成分と第2制御点の動きベクトルの水平成分との差分を、第1水平成分差分として決定することと、第1制御点の動きベクトルの垂直成分と第2制御点の動きベクトルの垂直成分との差分を、第1垂直成分差分として決定することと、を含み、かつ、第3制御点および第4制御点の動きベクトルどうしの第2水平成分差分および第2垂直成分差分を求めることは、第3制御点の動きベクトルの水平成分と第4制御点の動きベクトルの水平成分との差分を、第2水平成分差分として決定することと、第3制御点の動きベクトルの垂直成分と第4制御点の動きベクトルの垂直成分との差分を、第2垂直成分差分として決定することと、を含む。

動きベクトルを得るためにビットストリームを解析して、アフィンピクチャブロックの差分とアフィンの動きベクトル精度とを取得し(ここで、アフィンピクチャブロックの画素は同一のアフィン変換パラメータをもつ)、
動きベクトル差分と、動きベクトル精度とアフィンピクチャブロックにおける制御点どうしの間の距離とにしたがって、アフィンピクチャブロックにおけるアフィン動き補償ピクチャサブブロックの大きさを決定し(ここで、制御点は、動きベクトル差分を決定するのに用いられる画素である)、かつ、アフィン動き補償ピクチャサブブロックのサイズにしたがって、アフィンピクチャブロックに対して復号化処理を行なうものであってもよい。
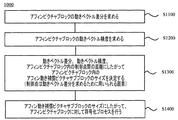
ビットストリームを解析してアフィンピクチャブロック情報を取得し、
アフィンピクチャブロック情報にしたがって、アフィンピクチャブロックにおけるアフィン動き補償ピクチャサブブロックのサイズを決定して、
アフィン動き補償ピクチャサブブロックのサイズにしたがって、アフィンピクチャブロックに対して復号化処理を行なうものであってもよい。
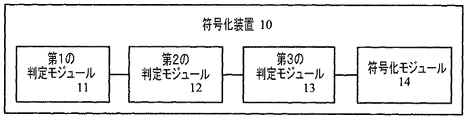
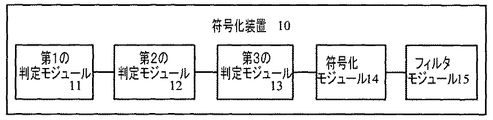
アフィン画像の動きベクトル差分を求めるように構成された第1の判定モジュール11と、
アフィンピクチャブロックの動きベクトル精度を求めるように構成された第2の判定モジュール12と、
第1の判定モジュール11によって求められた動きベクトル差分と、第2の判定モジュール12によって求められた動きベクトル精度と、アフィンピクチャブロック内の制御点であって動きベクトル差分を決定するために用いられる画素である制御点どうしの距離とにしたがって、アフィンピクチャブロックのアフィン動き補償ピクチャサブブロックのサイズを決定するように構成された第3の判定モジュール13と、
第3のモジュール13によって決定されたアフィン動き補償ピクチャサブブロックのサイズによしたがってアフィンピクチャブロックに対して符号化処理を行なうように構成された符号化モジュール14と、
を備えている。
各アフィン動き補償ピクチャサブブロックの境界における1つまたは複数の列内の画素である各アフィン動き補償ピクチャサブブロックの境界画素の信号をフィルタリングするように設構成された、フィルタモジュール15をさらに備えている。
アフィン画像の動きベクトル差分を求めるように構成された第1の判定モジュール21と、
アフィンピクチャブロックの動きベクトル精度を求めるように構成された第2の判定モジュール22と、
第1の判定モジュール21によって求めた動きベクトル差分と、第2の判定モジュール22によって求めた動きベクトル精度と、アフィンピクチャブロックにおける制御点であって動きベクトル差分を求めるために用いられる画素である制御点どうしの距離と、にしたがって、アフィンピクチャブロックのアフィン動き補償ピクチャサブブロックのサイズを決定するように構成された、第3の判定モジュール23と、
第3のモジュール23によって求めたアフィン動き補償ピクチャサブブロックのサイズにしたがって、アフィンピクチャブロックに対して復号化処理を行なうように構成された、復号化モジュール24と、
を備えている。
ここで、第1制御点と第2制御点との間には第1水平距離が存在し、かつ、第3制御点と第4制御点との間には第1垂直距離が存在する。
動きベクトル差分の第1成分に対する、動きベクトル精度と第1水平距離との積の比があらかじめ定められた第1設定値以上であるとき、この比を、アフィン動き補償ピクチャサブブロックの水平方向長さとして決定し、または、動きベクトル差分の第1成分に対する、動きベクトル精度と第1水平距離との積の比が第1設定値未満であるとき、この第1設定値を、アフィン動き補償ピクチャサブブロックの水平方向長さとして決定し、かつ、
動きベクトル差分の第2成分に対する、動きベクトル精度と第1垂直距離との積の比があらかじめ定められた第2設定値以上であるとき、この比を、アフィン動き補償ピクチャサブブロックの垂直方向長さとして決定し、または、動きベクトル差分の第2成分に対する、動きベクトル精度と第1垂直距離との積の比が第2設定値未満であるとき、この第2設定値を、アフィン動き補償ピクチャサブブロックの垂直方向長さとして決定するように特に構成されている。
Claims (20)
- ビデオ画像の符号化方法であって、
アフィンピクチャブロックの動きベクトル差分を決定するステップと、
前記アフィンピクチャブロックの動きベクトル精度を取得するステップと、
前記アフィンピクチャブロック内の制御点間の距離を決定するステップであって、前記制御点の動きベクトルは、前記動きベクトル差分を決定するために使用される、ステップと、
前記動きベクトル差分、前記動きベクトル精度、および前記アフィンピクチャブロック内の前記制御点間の前記距離に基づいて変化するサイズにわたって、前記アフィンピクチャブロックに対して符号化処理を実行するステップであって、前記サイズは幅(aMcW)及び高さ(aMcH)により規定され、前記幅は前記動きベクトル差分の水平成分、前記動きベクトル精度、および前記制御点の間の水平距離に基づいており、前記高さは前記動きベクトル差分の垂直成分、前記動きベクトル精度、および前記制御点の間の垂直距離に基づいている、ステップと
を含む、方法。 - 前記制御点は、第1制御点、第2制御点、第3制御点、および第4制御点を含み、
前記水平距離は、前記第1制御点と前記第2制御点との間にあり、
前記垂直距離は、前記第3制御点と前記第4制御点との間にある、請求項1に記載の方法。 - 前記アフィンピクチャブロックの前記動きベクトル差分を決定するステップは、
前記第1制御点および前記第2制御点の前記動きベクトル間の差分に従って、前記動きベクトル差分の前記水平成分を決定するステップであって、前記第1制御点および前記第2制御点は同じ水平線上に位置する、ステップと、
前記第3制御点および前記第4制御点の前記動きベクトル間の差分に従って、前記動きベクトル差分の前記垂直成分を決定するステップであって、前記第3制御点および前記第4制御点は同じ垂直線上に位置する、ステップと
を含む、請求項2に記載の方法。 - 前記動きベクトル差分の前記水平成分を決定するステップは、
前記第1制御点および前記第2制御点の前記動きベクトル間の第1の水平成分差分および第1の垂直成分差分を決定するステップと、
前記第1の水平成分差分および前記第1の垂直成分差分のうち大きい方を前記動きベクトル差分の前記水平成分として決定するステップと、
を含み、
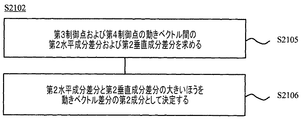
前記動きベクトル差分の前記垂直成分を決定するステップは、
前記第3制御点および前記第4制御点の動きベクトル間の第2の水平成分差分および第2の垂直成分差分を決定するステップと、
前記第2の水平成分差分および前記第2の垂直成分差分のうち大きい方を前記動きベクトル差分の前記垂直成分として決定するステップと
を含む、請求項3に記載の方法。 - 前記第1制御点および前記第2制御点の前記動きベクトル間の前記第1の水平成分差分および前記第1の垂直成分差分を決定するステップは、
前記第1制御点の前記動きベクトルの水平成分と、前記第2制御点の前記動きベクトルの水平成分との差分を前記第1の水平成分差分として決定するステップと、
前記第1制御点の前記動きベクトルの垂直成分と、前記第2制御点の前記動きベクトルの垂直成分との差分を前記第1の垂直成分差分として決定するステップと
を含み、
前記第3制御点および前記第4制御点の前記動きベクトル間の前記第2の水平成分差分および前記第2の垂直成分差分を決定するステップは、
前記第3制御点の前記動きベクトルの水平成分と、前記第4制御点の前記動きベクトルの水平成分との差分を前記第2の水平成分差分として決定するステップと、
前記第3制御点の前記動きベクトルの垂直成分と、前記第4制御点の前記動きベクトルの垂直成分との差分を前記第2の垂直成分差分として決定するステップと
を含む、請求項4に記載の方法。 - 前記第1制御点および前記第2制御点は2つの隣接するピクセルであり、前記第3制御点および前記第4制御点は2つの隣接するピクセルであり、
前記第1制御点および前記第2制御点の前記動きベクトル間の前記第1の水平成分差分および前記第1の垂直成分差分を決定するステップ、および前記第3制御点および前記第4制御点の前記動きベクトル間の前記第2の水平成分差分および前記第2の垂直成分差分を決定するステップは、
第1のピクセルの動きベクトル、第2のピクセルの動きベクトル、および第3のピクセルの動きベクトルを決定するステップであって、前記第1のピクセル、前記第2のピクセル、および前記第3のピクセルは、重複しないピクセルである、ステップと、
前記第1のピクセルおよび前記第2のピクセル間の第2の水平距離および第2の垂直距離を決定するステップと、
前記第1のピクセルおよび前記第3のピクセル間の第3の水平距離および第3の垂直距離を決定するステップと、
前記第1のピクセルの前記動きベクトル、前記第2のピクセルの前記動きベクトル、前記第3のピクセルの前記動きベクトル、前記第2の水平距離、前記第2の垂直距離、前記第3の水平距離、および前記第3の垂直距離に従って、前記第1の水平成分差分、前記第1の垂直成分差分、前記第2の水平成分差分、および前記第2の垂直成分差分を決定するステップと
を含む、請求項4に記載の方法。 - 前記第1制御点、前記第2制御点、前記第3制御点、および前記第4制御点は、前記アフィンピクチャブロックの頂点であり、前記アフィンピクチャブロックは矩形である、請求項2に記載の方法。
- 前記第1制御点と前記第2制御点との間の距離は前記アフィンピクチャブロックの幅Wであり、前記第3制御点と前記第4制御点の間の距離は前記アフィンピクチャブロックの高さHである、請求項7に記載の方法。
- 前記アフィンピクチャブロックの前記動きベクトル精度を決定するステップは、
前記アフィンピクチャブロックの前記動きベクトル精度として第3の事前設定された値を決定するステップ、または
前記アフィンピクチャブロックに隣接するピクチャブロックの特徴に従って、前記アフィンピクチャブロックの前記動きベクトル精度を決定するステップであって、前記隣接するピクチャブロックは、前記アフィンピクチャブロックに空間的または時間的に隣接するピクチャブロックである、ステップ
を含む、請求項1に記載の方法。 - 前記動きベクトル精度は、1/2、1/4、1/8、または1/16である、請求項1に記載の方法。
- 1つまたは複数のプロセッサと、
前記1つまたは複数のプロセッサにおいて実行される命令を格納するメモリと
を備えたビデオ画像復号デバイスであって、
前記1つまたは複数のプロセッサは、
アフィンピクチャブロックの動きベクトル差分を決定することと、
前記アフィンピクチャブロックの動きベクトル精度を取得することと、
前記アフィンピクチャブロック内の制御点間の距離を決定することであって、前記制御点の動きベクトルは、前記動きベクトル差分を決定するために使用されることと、
前記動きベクトル差分、前記動きベクトル精度、および前記アフィンピクチャブロック内の前記制御点間の前記距離に基づいて変化するサイズにわたって、前記アフィンピクチャブロックに対して符号化処理を実行することであって、前記サイズは幅(aMcW)及び高さ(aMcH)により規定され、前記幅は前記動きベクトル差分の水平成分、前記動きベクトル精度、および前記制御点の間の水平距離に基づいており、前記高さは前記動きベクトル差分の垂直成分、前記動きベクトル精度、および前記制御点の間の垂直距離に基づいている、ことと
を行う命令を実行する、デバイス。 - 前記制御点は、第1制御点、第2制御点、第3制御点、および第4制御点を含み、
前記水平距離は、前記第1制御点と前記第2制御点との間にあり、
前記垂直距離は、前記第3制御点と前記第4制御点との間にある、請求項11に記載のデバイス。 - 前記1つまたは複数のプロセッサは、
前記第1制御点および前記第2制御点の前記動きベクトル間の差分に従って、前記動きベクトル差分の前記水平成分を決定することであって、前記第1制御点および前記第2制御点は同じ水平線上に位置することと、
前記第3制御点および前記第4制御点の前記動きベクトル間の差分に従って、前記動きベクトル差分の前記垂直成分を決定することであって、前記第3制御点および前記第4制御点は同じ垂直線上に位置することと
を行う命令を実行する、請求項12に記載のデバイス。 - 前記1つまたは複数のプロセッサは、
前記第1制御点および前記第2制御点の前記動きベクトル間の第1の水平成分差分および第1の垂直成分差分を決定することと、
前記第1の水平成分差分および前記第1の垂直成分差分のうち大きい方を前記動きベクトル差分の前記水平成分として決定することと、
前記第3制御点および前記第4制御点の前記動きベクトル間の第2の水平成分差分および第2の垂直成分差分を決定することと、
前記第2の水平成分差分および前記第2の垂直成分差分のうち大きい方を前記動きベクトル差分の前記垂直成分として決定することと
を行う命令を実行する、請求項13に記載のデバイス。 - 前記1つまたは複数のプロセッサは、
前記第1制御点の前記動きベクトルの水平成分と、前記第2制御点の前記動きベクトルの水平成分との差分を前記第1の水平成分差分として決定することと、
前記第1制御点の前記動きベクトルの垂直成分と、前記第2制御点の前記動きベクトルの垂直成分との差分を前記第1の垂直成分差分として決定することと、
前記第3制御点の前記動きベクトルの水平成分と、前記第4制御点の前記動きベクトルの水平成分との差分を前記第2の水平成分差分として決定することと、
前記第3制御点の前記動きベクトルの垂直成分と、前記第4制御点の前記動きベクトルの垂直成分との差分を前記第2の垂直成分差分として決定することと
を行う命令を実行する、請求項14に記載のデバイス。 - 前記第1制御点、前記第2制御点、前記第3制御点、および前記第4制御点は、前記アフィンピクチャブロックの頂点であり、前記アフィンピクチャブロックは矩形である、請求項12に記載のデバイス。
- 前記第1制御点と前記第2制御点との間の距離は前記アフィンピクチャブロックの幅Wであり、前記第3制御点と前記第4制御点の間の距離は前記アフィンピクチャブロックの高さHである、請求項16に記載のデバイス。
- 前記1つまたは複数のプロセッサは、
前記アフィンピクチャブロックの前記動きベクトル精度として第3の事前設定された値を決定する命令を実行する、請求項11に記載のデバイス。 - 前記1つまたは複数のプロセッサは、
前記アフィンピクチャブロックに隣接するピクチャブロックの特徴に従って、前記アフィンピクチャブロックの前記動きベクトル精度を決定する命令を実行し、前記隣接するピクチャブロックは、前記アフィンピクチャブロックに空間的または時間的に隣接するピクチャブロックである、請求項11に記載のデバイス。 - 前記デバイスはデコーダである、請求項11に記載のデバイス。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021184230A JP7260620B2 (ja) | 2015-05-15 | 2021-11-11 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510249484.8A CN106303543B (zh) | 2015-05-15 | 2015-05-15 | 视频图像编码和解码的方法、编码设备和解码设备 |
| CN201510249484.8 | 2015-05-15 | ||
| JP2017559585A JP6978944B2 (ja) | 2015-05-15 | 2016-03-30 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017559585A Division JP6978944B2 (ja) | 2015-05-15 | 2016-03-30 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021184230A Division JP7260620B2 (ja) | 2015-05-15 | 2021-11-11 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020174373A JP2020174373A (ja) | 2020-10-22 |
| JP6978552B2 true JP6978552B2 (ja) | 2021-12-08 |
Family
ID=57319464
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017559585A Active JP6978944B2 (ja) | 2015-05-15 | 2016-03-30 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
| JP2020114144A Active JP6978552B2 (ja) | 2015-05-15 | 2020-07-01 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
| JP2021184230A Active JP7260620B2 (ja) | 2015-05-15 | 2021-11-11 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
| JP2023062068A Active JP7507922B2 (ja) | 2015-05-15 | 2023-04-06 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017559585A Active JP6978944B2 (ja) | 2015-05-15 | 2016-03-30 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021184230A Active JP7260620B2 (ja) | 2015-05-15 | 2021-11-11 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
| JP2023062068A Active JP7507922B2 (ja) | 2015-05-15 | 2023-04-06 | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 |
Country Status (13)
| Country | Link |
|---|---|
| US (5) | US10390036B2 (ja) |
| EP (3) | EP3291557B1 (ja) |
| JP (4) | JP6978944B2 (ja) |
| KR (3) | KR102148804B1 (ja) |
| CN (2) | CN109005407B (ja) |
| AU (1) | AU2016264380B2 (ja) |
| CA (1) | CA2985868C (ja) |
| ES (1) | ES2900232T3 (ja) |
| MX (2) | MX376561B (ja) |
| MY (1) | MY183126A (ja) |
| RU (1) | RU2689426C1 (ja) |
| SG (1) | SG11201709418UA (ja) |
| WO (1) | WO2016184261A1 (ja) |
Families Citing this family (92)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108965869B (zh) | 2015-08-29 | 2023-09-12 | 华为技术有限公司 | 图像预测的方法及设备 |
| CN109274974B (zh) | 2015-09-29 | 2022-02-11 | 华为技术有限公司 | 图像预测的方法及装置 |
| CN107027040B9 (zh) * | 2016-01-29 | 2020-08-28 | 华为技术有限公司 | 一种去除块效应的滤波方法及装置 |
| US20190273943A1 (en) * | 2016-10-10 | 2019-09-05 | Sharp Kabushiki Kaisha | Systems and methods for performing motion compensation for coding of video data |
| CN108271023B (zh) | 2017-01-04 | 2021-11-19 | 华为技术有限公司 | 图像预测方法和相关设备 |
| CN109391814B (zh) * | 2017-08-11 | 2023-06-06 | 华为技术有限公司 | 视频图像编码和解码的方法、装置及设备 |
| US10609384B2 (en) * | 2017-09-21 | 2020-03-31 | Futurewei Technologies, Inc. | Restriction on sub-block size derivation for affine inter prediction |
| KR102591095B1 (ko) * | 2017-09-28 | 2023-10-19 | 삼성전자주식회사 | 부호화 방법 및 그 장치, 복호화 방법 및 그 장치 |
| US20200236385A1 (en) * | 2017-10-03 | 2020-07-23 | Nec Corporation | Video coding device, video decoding device, video coding method, video decoding method and program |
| US20200288141A1 (en) * | 2017-10-03 | 2020-09-10 | Nec Corporation | Video coding device, video decoding device, video coding method, video decoding method, program and video system |
| WO2019072210A1 (en) * | 2017-10-13 | 2019-04-18 | Huawei Technologies Co., Ltd. | RESTRICTION ON SUB-BLOCK SIZE DEDUCTION FOR AFFINE INTERPREDITION |
| CN109729352B (zh) | 2017-10-27 | 2020-07-21 | 华为技术有限公司 | 确定仿射编码块的运动矢量的方法和装置 |
| TW201929550A (zh) * | 2017-12-13 | 2019-07-16 | 財團法人工業技術研究院 | 視訊編解碼方法及其影像處理裝置 |
| US20190208211A1 (en) * | 2018-01-04 | 2019-07-04 | Qualcomm Incorporated | Generated affine motion vectors |
| US10757417B2 (en) * | 2018-01-20 | 2020-08-25 | Qualcomm Incorporated | Affine motion compensation in video coding |
| JP7109558B2 (ja) | 2018-02-14 | 2022-07-29 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | 適応型補間フィルタ |
| KR20250020687A (ko) * | 2018-04-01 | 2025-02-11 | 광동 오포 모바일 텔레커뮤니케이션즈 코포레이션 리미티드 | 어파인 움직임 예측에 기반한 영상 코딩 방법 및 그 장치 |
| WO2019194506A1 (ko) * | 2018-04-01 | 2019-10-10 | 엘지전자 주식회사 | 어파인 인터 예측에 기반한 영상 코딩 방법 및 그 장치 |
| US11509925B2 (en) | 2018-04-12 | 2022-11-22 | Samsung Electronics Co.. Ltd. | Method and device for video encoding and video decoding motion vector information |
| KR102817113B1 (ko) | 2018-04-13 | 2025-06-05 | 엘지전자 주식회사 | 비디오 처리 시스템에서 인터 예측 방법 및 장치 |
| WO2019199152A1 (ko) * | 2018-04-14 | 2019-10-17 | 엘지전자 주식회사 | 어파인 예측을 이용하여 비디오 신호를 처리하는 방법 및 장치 |
| EP4246979B1 (en) * | 2018-04-24 | 2025-10-15 | TCL King Electrical Appliances (Huizhou) Co. Ltd. | Method and apparatus for inter prediction in video coding system |
| WO2019231256A1 (ko) * | 2018-05-30 | 2019-12-05 | 엘지전자 주식회사 | 어파인 움직임 예측을 이용하여 비디오 신호를 처리하는 방법 및 장치 |
| WO2019235819A1 (ko) * | 2018-06-04 | 2019-12-12 | 엘지전자 주식회사 | 비디오 신호를 처리하기 위한 방법 및 장치 |
| WO2019234598A1 (en) | 2018-06-05 | 2019-12-12 | Beijing Bytedance Network Technology Co., Ltd. | Interaction between ibc and stmvp |
| CN110620932B (zh) | 2018-06-19 | 2022-11-08 | 北京字节跳动网络技术有限公司 | 依赖模式的运动矢量差精度集 |
| US10999596B2 (en) * | 2018-06-19 | 2021-05-04 | Qualcomm Incorporated | Unification of affine motion field derivation and affine motion compensation |
| KR20210024565A (ko) * | 2018-06-20 | 2021-03-05 | 미디어텍 인크. | 비디오 코딩 시스템을 위한 모션 벡터 버퍼 관리 방법 및 장치 |
| EP3788782A1 (en) | 2018-06-21 | 2021-03-10 | Beijing Bytedance Network Technology Co. Ltd. | Sub-block mv inheritance between color components |
| CN110636298B (zh) | 2018-06-21 | 2022-09-13 | 北京字节跳动网络技术有限公司 | 对于Merge仿射模式和非Merge仿射模式的统一约束 |
| US11070813B2 (en) * | 2018-06-29 | 2021-07-20 | Intel Corporation | Global motion estimation and modeling for accurate global motion compensation for efficient video processing or coding |
| US11758175B2 (en) * | 2018-06-30 | 2023-09-12 | B1 Institute Of Image Technology, Inc | Image encoding/decoding method and apparatus |
| CN110677675B (zh) * | 2018-07-01 | 2022-02-08 | 北京字节跳动网络技术有限公司 | 高效的仿射Merge运动矢量推导的方法、装置及存储介质 |
| CN120614463A (zh) * | 2018-07-02 | 2025-09-09 | Lg电子株式会社 | 视频信号解码和编码方法及存储介质 |
| CN110876282B (zh) | 2018-07-02 | 2022-10-18 | 华为技术有限公司 | 运动矢量预测方法以及相关装置 |
| GB2590228B (en) | 2018-08-04 | 2023-04-05 | Beijing Bytedance Network Tech Co Ltd | Clipping of updated MV or derived MV |
| CN120075463A (zh) * | 2018-08-27 | 2025-05-30 | 松下电器(美国)知识产权公司 | 编码装置、解码装置和存储介质 |
| CN116647696A (zh) | 2018-09-06 | 2023-08-25 | Lg电子株式会社 | 图像解码方法、图像编码方法、存储介质和发送方法 |
| CN116033150A (zh) * | 2018-09-08 | 2023-04-28 | 北京字节跳动网络技术有限公司 | 不同视频块尺寸的仿射模式计算 |
| CN110891176B (zh) * | 2018-09-10 | 2023-01-13 | 华为技术有限公司 | 基于仿射运动模型的运动矢量预测方法及设备 |
| WO2020055161A1 (ko) | 2018-09-12 | 2020-03-19 | 엘지전자 주식회사 | 영상 코딩 시스템에서 서브 블록 단위의 움직임 예측에 기반한 영상 디코딩 방법 및 장치 |
| JP7212150B2 (ja) | 2018-09-19 | 2023-01-24 | 北京字節跳動網絡技術有限公司 | 適応動きベクトル解像度によるアフィンモードへの構文の使用 |
| EP3854078A1 (en) * | 2018-09-21 | 2021-07-28 | InterDigital VC Holdings, Inc. | Translational and affine candidates in a unified list |
| WO2020060344A1 (ko) * | 2018-09-21 | 2020-03-26 | 엘지전자 주식회사 | 영상 신호를 처리하기 위한 방법 및 장치 |
| US10834417B2 (en) * | 2018-09-21 | 2020-11-10 | Tencent America LLC | Method and apparatus for video coding |
| TWI846733B (zh) * | 2018-09-23 | 2024-07-01 | 大陸商北京字節跳動網絡技術有限公司 | 涉及仿射運動的一般應用 |
| WO2020065517A1 (en) | 2018-09-24 | 2020-04-02 | Beijing Bytedance Network Technology Co., Ltd. | Simplified history based motion vector prediction |
| CN112740663B (zh) * | 2018-09-24 | 2022-06-14 | 华为技术有限公司 | 图像预测方法、装置以及相应的编码器和解码器 |
| WO2020070612A1 (en) | 2018-10-06 | 2020-04-09 | Beijing Bytedance Network Technology Co., Ltd. | Improvement for temporal gradient calculating in bio |
| WO2020070730A2 (en) * | 2018-10-06 | 2020-04-09 | Beijing Bytedance Network Technology Co., Ltd. | Size restriction based on affine motion information |
| CN111083484B (zh) | 2018-10-22 | 2024-06-28 | 北京字节跳动网络技术有限公司 | 基于子块的预测 |
| CN112997489B (zh) | 2018-11-06 | 2024-02-06 | 北京字节跳动网络技术有限公司 | 具有几何分割的帧间预测的边信息信令 |
| CN112997495B (zh) | 2018-11-10 | 2024-02-20 | 北京字节跳动网络技术有限公司 | 当前图片参考中的取整 |
| CN111436227B (zh) | 2018-11-12 | 2024-03-29 | 北京字节跳动网络技术有限公司 | 在视频处理中使用组合帧间-帧内预测 |
| CN113170105B (zh) * | 2018-11-16 | 2024-11-05 | 北京字节跳动网络技术有限公司 | 基于历史的仿射参数继承 |
| WO2020103877A1 (en) | 2018-11-20 | 2020-05-28 | Beijing Bytedance Network Technology Co., Ltd. | Coding and decoding of video coding modes |
| WO2020117013A1 (ko) * | 2018-12-06 | 2020-06-11 | 엘지전자 주식회사 | 인터 예측을 기반으로 비디오 신호를 처리하기 위한 방법 및 장치 |
| JP2022028089A (ja) * | 2018-12-17 | 2022-02-15 | ソニーグループ株式会社 | 画像符号化装置、画像符号化方法、画像復号装置、および画像復号方法 |
| WO2020135368A1 (zh) * | 2018-12-24 | 2020-07-02 | 华为技术有限公司 | 一种帧间预测的方法和装置 |
| CN111355961B (zh) * | 2018-12-24 | 2023-11-03 | 华为技术有限公司 | 一种帧间预测的方法和装置 |
| EP3905675A4 (en) | 2018-12-28 | 2022-10-26 | Samsung Electronics Co., Ltd. | METHOD AND APPARATUS FOR ENCODING MOTION VECTOR DIFFERENCES AND METHOD AND APPARATUS FOR DECODING MOTION VECTOR DIFFERENCES |
| CN113170166B (zh) | 2018-12-30 | 2023-06-09 | 北京字节跳动网络技术有限公司 | 具有几何分割的帧间预测在视频处理中有条件的应用 |
| WO2020141910A1 (ko) * | 2019-01-02 | 2020-07-09 | 엘지전자 주식회사 | 화면간 예측을 사용하여 비디오 신호를 처리하기 위한 방법 및 장치 |
| WO2020140243A1 (zh) * | 2019-01-03 | 2020-07-09 | 北京大学 | 视频图像处理方法与装置 |
| WO2020141935A1 (ko) * | 2019-01-03 | 2020-07-09 | 엘지전자 주식회사 | 인터 예측을 기반으로 비디오 신호를 처리하기 위한 방법 및 장치 |
| WO2020156516A1 (en) | 2019-01-31 | 2020-08-06 | Beijing Bytedance Network Technology Co., Ltd. | Context for coding affine mode adaptive motion vector resolution |
| CN120980252A (zh) | 2019-01-31 | 2025-11-18 | 北京字节跳动网络技术有限公司 | 对称运动矢量差编解码模式的快速算法 |
| US11134262B2 (en) * | 2019-02-28 | 2021-09-28 | Tencent America LLC | Method and apparatus for video coding |
| JP7026064B2 (ja) * | 2019-03-11 | 2022-02-25 | Kddi株式会社 | 画像復号装置、画像復号方法及びプログラム |
| CN111247804B (zh) * | 2019-03-12 | 2023-10-13 | 北京大学 | 图像处理的方法与装置 |
| US11394993B2 (en) * | 2019-03-13 | 2022-07-19 | Tencent America LLC | Method and apparatus for affine inter prediction with small subblocks |
| US11343525B2 (en) * | 2019-03-19 | 2022-05-24 | Tencent America LLC | Method and apparatus for video coding by constraining sub-block motion vectors and determining adjustment values based on constrained sub-block motion vectors |
| WO2020233660A1 (en) * | 2019-05-21 | 2020-11-26 | Beijing Bytedance Network Technology Co., Ltd. | Syntax-based motion candidate derivation in sub-block merge mode |
| US11153598B2 (en) * | 2019-06-04 | 2021-10-19 | Tencent America LLC | Method and apparatus for video coding using a subblock-based affine motion model |
| US11330287B2 (en) | 2019-06-28 | 2022-05-10 | Tencent America LLC | Method and apparatus for video coding |
| EP3997869A4 (en) | 2019-08-10 | 2022-10-26 | Beijing Bytedance Network Technology Co., Ltd. | Subpicture dependent signaling in video bitstreams |
| CN110636301B (zh) | 2019-09-18 | 2021-08-03 | 浙江大华技术股份有限公司 | 仿射预测方法、计算机设备和计算机可读存储介质 |
| KR102779596B1 (ko) | 2019-09-30 | 2025-03-10 | 후아웨이 테크놀러지 컴퍼니 리미티드 | Dct 기반 보간 필터의 사용 |
| CN114450958B (zh) | 2019-09-30 | 2023-08-22 | 华为技术有限公司 | 用于减小增强插值滤波器的内存带宽的仿射运动模型限制 |
| WO2020251416A2 (en) | 2019-09-30 | 2020-12-17 | Huawei Technologies Co., Ltd. | Affine motion model restrictions reducing number of fetched reference lines during processing of one block row with enhanced interpolation filter |
| WO2020242350A2 (en) | 2019-09-30 | 2020-12-03 | Huawei Technologies Co., Ltd. | Usage of dct based interpolation filter and enhanced bilinear interpolation filter in affine motion compensation |
| CN114631321B (zh) | 2019-10-18 | 2024-04-12 | 北京字节跳动网络技术有限公司 | 子图片与环路滤波之间的相互影响 |
| CN115280774B (zh) | 2019-12-02 | 2025-08-19 | 抖音视界有限公司 | 视觉媒体处理的方法、装置及非暂时性计算机可读存储介质 |
| EP4078966A4 (en) | 2020-01-07 | 2023-06-21 | Huawei Technologies Co., Ltd. | MOTION VECTOR RANGE DERIVATION FOR IMPROVED INTERPOLATION FILTER |
| WO2021188876A1 (en) | 2020-03-20 | 2021-09-23 | Beijing Dajia Internet Information Technology Co., Ltd. | Spatial neighbor based affine motion derivation |
| KR20220157950A (ko) | 2020-03-23 | 2022-11-29 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 어파인 머지 및 어파인 모션 벡터 예측 모드에 대한 예측 리파인먼트 |
| CN114071157A (zh) * | 2020-07-29 | 2022-02-18 | Oppo广东移动通信有限公司 | 帧间预测方法、编码器、解码器以及计算机存储介质 |
| CN114342390B (zh) * | 2020-07-30 | 2022-10-28 | 北京达佳互联信息技术有限公司 | 用于仿射运动补偿的预测细化的方法和装置 |
| CN113313628B (zh) * | 2021-06-29 | 2023-02-03 | 河南工业大学 | 基于仿射变换和均值像素法的环状编码点鲁棒性识别方法 |
| CN120677704A (zh) * | 2022-11-29 | 2025-09-19 | 现代自动车株式会社 | 利用基于仿射模型的预测的视频编解码方法和装置 |
| CN116385501B (zh) * | 2022-12-28 | 2026-04-21 | 深圳市联影高端医疗装备创新研究院 | 控制点确定、图像配准方法、装置及计算机设备 |
| WO2026079917A1 (ko) * | 2024-10-10 | 2026-04-16 | 광운대학교 산학협력단 | 아핀 모델 기반 화면 간 예측 보정 방법 및 장치 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI97008C (fi) * | 1993-06-02 | 1996-09-25 | Nokia Oy Ab | Menetelmä videokuvan ennustamiseksi käsittelyjärjestyksessä edellisen kuvan perusteella |
| US6275532B1 (en) * | 1995-03-18 | 2001-08-14 | Sharp Kabushiki Kaisha | Video coding device and video decoding device with a motion compensated interframe prediction |
| US5654771A (en) * | 1995-05-23 | 1997-08-05 | The University Of Rochester | Video compression system using a dense motion vector field and a triangular patch mesh overlay model |
| WO1997017797A2 (en) * | 1995-10-25 | 1997-05-15 | Sarnoff Corporation | Apparatus and method for quadtree based variable block size motion estimation |
| JP3426092B2 (ja) * | 1996-09-12 | 2003-07-14 | シャープ株式会社 | 動画像符号化装置における動き補償フレーム間予測方法 |
| US6775415B1 (en) * | 1999-05-25 | 2004-08-10 | George Mason University | Fractal image compression using reinforcement learning |
| KR100359115B1 (ko) | 2000-05-24 | 2002-11-04 | 삼성전자 주식회사 | 영상 코딩 방법 |
| JP3681342B2 (ja) * | 2000-05-24 | 2005-08-10 | 三星電子株式会社 | 映像コーディング方法 |
| JP4355319B2 (ja) * | 2002-01-24 | 2009-10-28 | 株式会社日立製作所 | 動画像復号化方法 |
| US7408986B2 (en) * | 2003-06-13 | 2008-08-05 | Microsoft Corporation | Increasing motion smoothness using frame interpolation with motion analysis |
| KR100631777B1 (ko) * | 2004-03-31 | 2006-10-12 | 삼성전자주식회사 | 다 계층의 모션 벡터를 효율적으로 압축하는 방법 및 장치 |
| KR100586882B1 (ko) * | 2004-04-13 | 2006-06-08 | 삼성전자주식회사 | 모션 스케일러빌리티를 지원하는 코딩 방법 및 장치 |
| JP4340968B2 (ja) * | 2004-05-07 | 2009-10-07 | ソニー株式会社 | 画像処理装置および方法、記録媒体、並びにプログラム |
| KR101003105B1 (ko) * | 2008-01-29 | 2010-12-21 | 한국전자통신연구원 | 어파인 변환 기반의 움직임 보상을 이용한 비디오 부호화 및 복호화 방법 및 장치 |
| JP4544334B2 (ja) | 2008-04-15 | 2010-09-15 | ソニー株式会社 | 画像処理装置および画像処理方法 |
| WO2011070730A1 (ja) * | 2009-12-07 | 2011-06-16 | 日本電気株式会社 | 映像符号化装置および映像復号装置 |
| KR101626688B1 (ko) | 2010-04-13 | 2016-06-01 | 지이 비디오 컴프레션, 엘엘씨 | 샘플 영역 병합 |
| CN102547261B (zh) * | 2010-12-24 | 2016-06-15 | 上海电机学院 | 一种分形图像编码方法 |
| CN102611884B (zh) | 2011-01-19 | 2014-07-09 | 华为技术有限公司 | 图像编解码方法及编解码设备 |
| WO2013033790A1 (en) * | 2011-09-09 | 2013-03-14 | Newsouth Innovations Pty Limited | A method and apparatus for communicating and recovering motion information |
| EP3657796A1 (en) | 2011-11-11 | 2020-05-27 | GE Video Compression, LLC | Efficient multi-view coding using depth-map estimate for a dependent view |
| EP3468184B1 (en) * | 2011-11-11 | 2022-07-27 | GE Video Compression, LLC | Effective wedgelet partition coding using prediction |
| US9769473B2 (en) * | 2012-06-08 | 2017-09-19 | Apple Inc. | Predictive video coder with low power reference picture transformation |
| CN104704827B (zh) * | 2012-11-13 | 2019-04-12 | 英特尔公司 | 用于下一代视频的内容自适应变换译码 |
| RU2533852C2 (ru) * | 2012-12-26 | 2014-11-20 | Корпорация "САМСУНГ ЭЛЕКТРОНИКС Ко., Лтд." | Способ кодирования/декодирования многоракурсной видеопоследовательности на основе адаптивной компенсации локальных различий яркости при межкадровом предсказании (варианты) |
| KR102121558B1 (ko) | 2013-03-15 | 2020-06-10 | 삼성전자주식회사 | 비디오 이미지의 안정화 방법, 후처리 장치 및 이를 포함하는 비디오 디코더 |
| JP6399433B2 (ja) * | 2013-05-31 | 2018-10-03 | サン パテント トラスト | 画像符号化方法、画像復号方法、画像符号化装置及び画像復号装置 |
| CN105409207A (zh) * | 2013-07-15 | 2016-03-16 | 微软技术许可有限责任公司 | 基于特征的图像集合压缩 |
| US9258446B2 (en) * | 2013-10-16 | 2016-02-09 | Fuji Xerox Co., Ltd. | Image processing apparatus |
| US10554965B2 (en) * | 2014-08-18 | 2020-02-04 | Google Llc | Motion-compensated partitioning |
| CN104539966B (zh) * | 2014-09-30 | 2017-12-22 | 华为技术有限公司 | 图像预测方法及相关装置 |
| CN104363451B (zh) | 2014-10-27 | 2019-01-25 | 华为技术有限公司 | 图像预测方法及相关装置 |
| US20160316220A1 (en) * | 2015-04-21 | 2016-10-27 | Microsoft Technology Licensing, Llc | Video encoder management strategies |
| JP7105706B2 (ja) * | 2019-01-16 | 2022-07-25 | 三菱電機株式会社 | パワーモジュール |
-
2015
- 2015-05-15 CN CN201811104435.5A patent/CN109005407B/zh active Active
- 2015-05-15 CN CN201510249484.8A patent/CN106303543B/zh active Active
-
2016
- 2016-03-30 JP JP2017559585A patent/JP6978944B2/ja active Active
- 2016-03-30 SG SG11201709418UA patent/SG11201709418UA/en unknown
- 2016-03-30 WO PCT/CN2016/077784 patent/WO2016184261A1/zh not_active Ceased
- 2016-03-30 EP EP16795748.9A patent/EP3291557B1/en active Active
- 2016-03-30 KR KR1020197031419A patent/KR102148804B1/ko active Active
- 2016-03-30 CA CA2985868A patent/CA2985868C/en active Active
- 2016-03-30 AU AU2016264380A patent/AU2016264380B2/en active Active
- 2016-03-30 EP EP25163459.8A patent/EP4651489A1/en active Pending
- 2016-03-30 ES ES16795748T patent/ES2900232T3/es active Active
- 2016-03-30 MY MYPI2017704310A patent/MY183126A/en unknown
- 2016-03-30 RU RU2017143768A patent/RU2689426C1/ru active
- 2016-03-30 MX MX2017014652A patent/MX376561B/es active IP Right Grant
- 2016-03-30 KR KR1020177035893A patent/KR102297921B1/ko active Active
- 2016-03-30 KR KR1020207024140A patent/KR102257653B1/ko active Active
- 2016-03-30 EP EP21205488.6A patent/EP4033765B1/en active Active
-
2017
- 2017-11-14 US US15/812,719 patent/US10390036B2/en active Active
- 2017-11-15 MX MX2020011278A patent/MX2020011278A/es unknown
-
2019
- 2019-07-08 US US16/505,182 patent/US10887618B2/en active Active
-
2020
- 2020-07-01 JP JP2020114144A patent/JP6978552B2/ja active Active
- 2020-12-15 US US17/122,844 patent/US11490115B2/en active Active
-
2021
- 2021-11-11 JP JP2021184230A patent/JP7260620B2/ja active Active
-
2022
- 2022-09-09 US US17/941,895 patent/US11949908B2/en active Active
-
2023
- 2023-04-06 JP JP2023062068A patent/JP7507922B2/ja active Active
-
2024
- 2024-03-21 US US18/612,423 patent/US12432377B2/en active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6978552B2 (ja) | 動画像符号化方法、動画像復号化方法、符号化装置および復号化装置 | |
| CN108600749B (zh) | 图像预测的方法及设备 | |
| JP2020529811A (ja) | ビデオ画像符号化および復号方法、装置、およびデバイス | |
| RU2809673C2 (ru) | Способ и устройство предсказания изображения | |
| HK1244984B (en) | Video image coding and decoding method, coding device and decoding device | |
| BR112017024467B1 (pt) | Método de codificação de imagem de vídeo, método de decodificação de imagem de vídeo, dispositivo de codificação, e dispositivo de decodificação |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200707 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200707 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211012 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211111 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6978552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |