JP6927770B2 - プラント操作支援装置、および、プラント操作支援方法 - Google Patents
プラント操作支援装置、および、プラント操作支援方法 Download PDFInfo
- Publication number
- JP6927770B2 JP6927770B2 JP2017133806A JP2017133806A JP6927770B2 JP 6927770 B2 JP6927770 B2 JP 6927770B2 JP 2017133806 A JP2017133806 A JP 2017133806A JP 2017133806 A JP2017133806 A JP 2017133806A JP 6927770 B2 JP6927770 B2 JP 6927770B2
- Authority
- JP
- Japan
- Prior art keywords
- data
- plant
- category
- operation data
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/041—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators in which a variable is automatically adjusted to optimise the performance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0205—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system
- G05B13/021—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system in which a variable is automatically adjusted to optimise the performance
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Testing And Monitoring For Control Systems (AREA)
Description
なお、特許文献1などの従来技術では、現在のプラントの運転状態を起点として、どのような運転状態を目標とすればよいかを決定する手段は、提供されていない。
本発明は、制御対象のプラントから計測されたデータ、および、前記プラントを制御するための入力データのうちの少なくとも1つのデータである運転データについて、その運転データの大小関係をもとにカテゴリに分類し、各カテゴリのプラント状態ごとに運転させることで得られるプラント性能を前記プラントの評価値として算出し、
n次元(n≧4)の各運転データのカテゴリをXY平面上にマッピングすることで、現在の運転データがマッピングされるXY平面上の第1位置から前記各運転データがマッピングされるXY平面上の第2位置までの距離を空間距離として算出し、
それぞれ算出した前記評価値および前記空間距離をもとに、目標とする運転データの候補を複数個抽出する目標抽出部と、
抽出された前記運転データの候補ごとに、前記現在の運転データから前記目標とする運転データへと至る操作内容を操作経路として、各候補の前記操作経路を通過する運転データから得られるプラント性能に応じて評価することで、採用する前記操作経路およびその操作経路の終点である前記目標とする運転データを決定する経路決定部と、
前記操作経路の始点となる前記運転データから前記目標とする運転データまでの前記操作経路を、マップデータとして表示する表示部とを有することを特徴とする。
その他の手段は、後記する。
プラント21は、操作部23から入力される設定値データなどをもとに、プラント制御装置22により制御されている。プラント操作支援装置1は、操作部23を扱う運転員に対して、プラント21の操作内容の把握を支援させるための各種操作のガイダンスを表示操作部24に表示する。表示操作部24は、さらに、運転員からプラント操作支援装置1へのデータ入力を受け付ける。
このコンピュータは、CPUが、メモリ上に読み込んだプログラム(アプリケーションや、その略のアプリとも呼ばれる)を実行することにより、各処理部により構成される制御部(制御手段)を動作させる。
プラント操作支援装置1は、運転データデータベース11、目標状態候補抽出部12、プラントシミュレータ13、操作経路評価部14、操作経路決定部15、操作経路表示部16からなる。これらのプラント操作支援装置1の各構成要素の詳細は、図3以降で明らかにする。
系統図は、例えば系統図作成用CADソフトで作成された電子ファイルであり、系統図には、機器、接続配管、主要な計測機器が記載されている。系統図は、配管計装線図または、P&ID(Piping & Instrument Flow Diagram)とも呼ばれる。系統図には、機器としての反応器R1〜R4、機器間を接続する配管、計測器などの情報が記載されている。なお、図2で例示された28個の計測器にはF1,P1,T1などのタグがついており、Fが流量計、Pが圧力計、Tが温度計を示している。
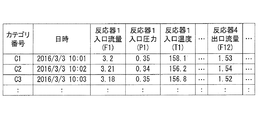
「運転データ」は、プラント21に関する時系列データ(日時ごとのデータ)のパラメータ集合であり、例えば以下に例示するパラメータのうちの少なくとも1つのパラメータから構成される。
なお、計測データは、プラント21の運転員が明示的に制御した場合だけでなく、なんらかの外乱により変化したプラント21の状態を示すデータとも言える。つまり、運転員が意図せずに、プラント性能が劣化した運転データに移行してしまうこともある。
さらに、運転データデータベース11の各運転データは、個別のカテゴリ番号が与えられ、分類(カテゴライズ)されている。つまり、「カテゴリ」は、ある時点でのプラント21が取り得る運転データとも言える。
分類器は、データ1とデータ2とのデータ値の関係により、例えば以下のように運転データをカテゴリに分類する(カテゴライズする)。
カテゴリC1:データ1の値:大、データ2の値:小
カテゴリC2:データ1の値:中、データ2の値:小
カテゴリC3:データ1の値:中、データ2の値:大
カテゴリC4:データ1の値:小、データ2の値:大
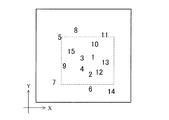
ここでは、マッピングに多次元尺度法(MDS:Multi Dimensional Scaling)を利用した。MDSは、p次元の複数データについて、データ間の距離が与えられた場合に、その距離情報をq次元の空間上に再現するように座標を決定する方法である。p>qの場合、距離情報を必ずしも正確に再現できないが、およその位置関係を把握するには有効である。特に、q=2とすると、多次元空間上のデータの平面上にマッピングすることができるため、多次元データの可視化に利用できる。
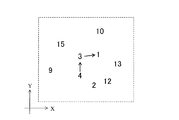
以下、操作経路に着目したカテゴリの呼び方を定義する。
・「初期カテゴリ」は、操作経路を決定した時点の(出発地の)運転データの状態を示す。図6では初期カテゴリ=4である。
・「現在カテゴリ」は、初期カテゴリより後である現在地の運転データの状態を示す。図6では現在カテゴリ=3である。
・「目標カテゴリ」は、決定した操作経路における目標とする(目的地の)運転データの状態を示す。図6では目標カテゴリ=1である。
現在カテゴリが操作経路に対して「逸脱状態」にあるとは、図6で現在カテゴリがカテゴリ=2に位置するなど、操作経路の矢印の線上から外れた状態を指す。一方、逸脱していない状態とは、操作経路の矢印の線上に現在カテゴリが位置する(カテゴリ=3など)状態である。
現在カテゴリの「移行度合い」は、例えば、操作経路の道のりに対する現在カテゴリの位置関係により定義される。例えば、現在カテゴリがカテゴリ3,4間の矢印上で、カテゴリ4から70%カテゴリ3に向かって進行中であるとき、カテゴリ4からカテゴリ3へ70%移行中である。このとき、初期カテゴリ(カテゴリ4)から現在カテゴリ(カテゴリ3へ70%移行中)までにかかった移行時間をもとに、今後現在カテゴリがカテゴリ3に100%移行完了する予定時刻を求めることができる。
例えば、運転データがバルブ開度であるときは、現在カテゴリ(開度:40%)から次のカテゴリ(開度:60%)へと変化させるために、プラント21の運転員がバルブ開度を変更する。このバルブの開度変更作業が完了したとき、次のカテゴリへの移行が完了する。
一方、運転データが温度データであるときは、現在カテゴリ(温度120℃)から次のカテゴリ(温度150℃)へと変化させるために、操作部23から温度の設定値を150℃に変更し、制御信号がプラント21に送信される。その結果、加熱用蒸気量が増加し温度データが実際に150℃になったときに、次のカテゴリへの移行が完了する。
S10(S11〜S14)は、目標状態候補抽出部12が図5のようなカテゴリマップデータを事前に用意する処理であり、運転データのカテゴリが更新される度に、実行される。
S11において、目標状態候補抽出部12は、図4で説明したように、図3の運転データを類似度に応じて、カテゴリに分類する。
S12において、目標状態候補抽出部12は、カテゴリごとの運転データの代表値を算出する。ここでは、各運転データの平均値を代表値とした。本実施例で用いた運転データは、図3に示す28項目である。例えば、カテゴリC1に含まれるデータが100点あったとすると、反応器1入口流量、反応器1入口圧力などの各項目毎に100点のデータの平均値を計算する。なお、本実施例では、代表値として平均値を採用したが、中央値など他の代表値を採用してもよい。
S13において、目標状態候補抽出部12は、図5で説明したように、S12の運転データの代表値を2次元平面(カテゴリマップデータ)にマッピングする。
図8は、S14でのプラント性能の計算結果を示すテーブルである。15個のカテゴリC1〜C15に分類された各運転データについて、プラント性能である製品収率が各カテゴリの評価値として計算された。
そして、目標状態候補抽出部12は、カテゴリマップデータ内に点在する各カテゴリに対して、図8のような評価値を対応付ける。
S21において、目標状態候補抽出部12は、図4で説明した分類器を用いて、現在の運転データを分類する。その結果、初期カテゴリ(=カテゴリC4)が決定する。
S22において、目標状態候補抽出部12は、プラント性能が高いカテゴリをN個抽出する。
図9は、図8のプラント性能のテーブルから、プラント性能が高い順にN=5個のカテゴリを抽出した結果を示すテーブルである。
ここでの「距離」とは、カテゴリAの運転データがマッピングされる多次元空間上の第1位置とカテゴリBの運転データがマッピングされる多次元空間上の第2位置との間の空間距離である。図5に示したカテゴリマップデータにおける各カテゴリ地点間の直線距離を、カテゴリ間の距離として用いると、多次元空間上の距離と若干の誤差が生じることもある。しかし、近似値でも大まかな傾向は一致するため、目標カテゴリの選択結果への影響は少ない(カテゴリの順位が入れ替わることは少ない)。
以上説明したように、目標状態候補抽出部12は、S22でプラント性能が高いカテゴリを選択し、さらに、S23でカテゴリ間の距離が近いカテゴリを選択する。これにより、プラント21を高性能に運転させるとともに、運転状態変更に要する時間も短縮されるような、バランスのよい目標カテゴリを適切に選択することができる。
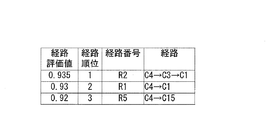
図11は、初期カテゴリ(=カテゴリC4)を出発地として、目標カテゴリの各候補(C1、C12、C15)に向かうまでの操作経路の組み合わせを示すテーブルである。例えば、カテゴリC4からカテゴリC1への経路は、直接カテゴリC1に行くケース(R1)と、カテゴリC3を経由してカテゴリC2に行くケース(R2)の2通りがある。同様にカテゴリC12に行くケースも2通りあり(R3,R4)、組み合わせの合計は、6通りとなる。
例えば、操作経路R1では、初期カテゴリであるカテゴリC4から、次のカテゴリであるカテゴリC1への運転データの移行が安定すれば、模擬終了となる。一方、操作経路R2では、初期カテゴリであるカテゴリC4から、カテゴリC3の状態で安定化させ、次にカテゴリC1の状態に変更するというように2段階で運転データを変更する。
プラントシミュレータ13では、このように各経路の製品収率を計算することができる。なお、評価指標として製品収率を計算したが、運転コストを計算してもよい。また、製品収率と運転コストという2つの評価指標を別々に計算し、それらの評価指標の重み付け平均などの複合的に考慮した複合指標を評価指標としてもよい。
(手順1)運転データデータベース11の運転データのうちの所定期間内(例えば過去6ヶ月間)の運転データの中から、カテゴリC4→C1に遷移したデータを全て抽出する。運転データデータベース11は図3に示したように予めカテゴリ分けされているため、カテゴリC4→C1に遷移した4件の事例を高速に抽出できた。
(手順2)抽出した4件のデータに対し、評価指標を計算し、その平均値を求める。本実施例では、実際の運転データから製品収率を計算し、平均値を求めた。
このように過去の実際の運転データを利用して評価値を計算することで、プラントシミュレータ13よりも高い精度で評価値を求めることができる。ただし、操作経路の候補が常に過去の実績データに含まれるとは限らない。その場合は、プラントシミュレータ13を併用してもよい。
ここでは、評価指標が製品収率のみであり、操作経路決定部15は、基本的には最も製品収率が高い候補を選べばよい。一方で、製品収率に大きな違いがなかった場合、例えば、最近の運転履歴や部品のメンテナンス情報を考慮して、操作経路決定部15は、経路を探索してもよい。また、評価指標が製品収率と運転コストのように複数ある場合、それらの複合指標のみで判断するのではなく、例えば運転コストを重視するなどの判断で、操作経路決定部15は、操作経路を選択してもよい。
これにより、プラント制御装置22がプラント21を最適に制御し、プラント性能を高く引き出すような運転データでプラント21を運用することができる。
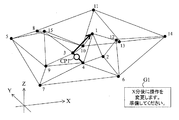
操作監視部17は、操作経路決定部15で決定した操作経路に沿って現在カテゴリから目標カテゴリに移行しているか否かを監視する。操作監視部17は、現在カテゴリに対するガイダンス情報として、現在カテゴリが操作経路から逸脱せずに順調に移行しているときには、その移行度合いを表示操作部24に表示させる。または、操作監視部17は、現在カテゴリが目標カテゴリに向かう操作経路から逸脱してしまったときには、その旨を表示操作部24に表示させる。
このように可視化することで、カテゴリ間の位置関係だけでなく、各カテゴリのプラント性能を直観的に把握することができる。
本例は、一旦カテゴリC3になるように操作してから、さらに操作をしてカテゴリC1に変更する場合である。そのため、現在カテゴリがカテゴリC3に近づいた段階で、次にカテゴリC1に操作することを運転員にガイダンスG1で知らせる。前記したように、操作経路上の現在カテゴリの移行度合いから、現在カテゴリが次カテゴリC3に到着するまでの予想時間(X分)がわかる。よって、操作監視部17は、カテゴリC3→C1に移行させるように、X分後に操作を変更する旨を、ガイダンスG1として表示操作部24に表示させる。
このようにガイダンスを表示することで、運転員の操作ミスを防ぐことができる。なお、位置情報CP1を示すアイコンは、目立つように、各カテゴリのノードや、ノード間の線とは異なる表示形態にて(色を変えるなど強調して)、表示することが望ましい。
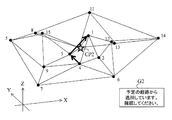
さらに、操作監視部17は、「予定の経路から逸脱しています。確認してください」という警報のガイダンスG2を表示操作部24に表示させる。なお、図17、図18では、表示画面上にガイダンスを表示したが、音声ガイダンスまたは、音声と画面の両方のガイダンスを利用してもよい。
また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。
また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。また、上記の各構成、機能、処理部、処理手段などは、それらの一部または全部を、例えば集積回路で設計するなどによりハードウェアで実現してもよい。
また、前記の各構成、機能などは、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。
また、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしも全ての制御線や情報線を示しているとは限らない。実際にはほとんど全ての構成が相互に接続されていると考えてもよい。
さらに、各装置を繋ぐ通信手段は、無線LANに限定せず、有線LANやその他の通信手段に変更してもよい。
11 運転データデータベース
12 目標状態候補抽出部(目標抽出部)
13 プラントシミュレータ
14 操作経路評価部(経路決定部)
15 操作経路決定部(経路決定部)
16 操作経路表示部
17 操作監視部
21 プラント
22 プラント制御装置
23 操作部
24 表示操作部(表示部)
Claims (7)
- 制御対象のプラントから計測されたデータ、および、前記プラントを制御するための入力データのうちの少なくとも1つのデータである運転データについて、その運転データの大小関係をもとにカテゴリに分類し、各カテゴリのプラント状態ごとに運転させることで得られるプラント性能を前記プラントの評価値として算出し、
n次元(n≧4)の各運転データのカテゴリをXY平面上にマッピングすることで、現在の運転データがマッピングされるXY平面上の第1位置から前記各運転データがマッピングされるXY平面上の第2位置までの距離を空間距離として算出し、
それぞれ算出した前記評価値および前記空間距離をもとに、目標とする運転データの候補を複数個抽出する目標抽出部と、
抽出された前記運転データの候補ごとに、前記現在の運転データから前記目標とする運転データへと至る操作内容を操作経路として、各候補の前記操作経路を通過する運転データから得られるプラント性能に応じて評価することで、採用する前記操作経路およびその操作経路の終点である前記目標とする運転データを決定する経路決定部と、
前記操作経路の始点となる前記運転データから前記目標とする運転データまでの前記操作経路を、マップデータとして表示する表示部とを有することを特徴とする
プラント操作支援装置。 - 前記目標抽出部は、算出した前記評価値および前記空間距離をもとに、前記目標とする運転データの候補を複数個抽出するときに、算出した前記評価値が高い順に所定個数の前記運転データを候補第1集合として抽出し、前記候補第1集合から、前記空間距離が小さい順に所定個数の前記運転データを候補第2集合として抽出し、前記候補第2集合を抽出結果として前記経路決定部に通知することを特徴とする
請求項1に記載のプラント操作支援装置。 - 前記プラント操作支援装置は、さらに、操作監視部を有しており、
前記操作監視部は、前記表示部に表示させる前記マップデータ上に、前記現在の運転データを示す情報を追加で表示させることを特徴とする
請求項1または請求項2に記載のプラント操作支援装置。 - 前記操作監視部は、前記現在の運転データが前記操作経路から逸脱している場合と、逸脱していない場合とで、前記現在の運転データを示す情報の表示形態を変えて前記表示部に表示させることを特徴とする
請求項3に記載のプラント操作支援装置。 - 前記操作監視部は、前記現在の運転データが前記操作経路から逸脱している場合に、前記目標抽出部に対して、逸脱している前記操作経路とは別の新たな目標とする運転データの候補を再計算させることで、前記現在の運転データを始点とする新たな操作経路に更新することを特徴とする
請求項4に記載のプラント操作支援装置。 - 前記表示部は、前記各運転データの代表値をXY平面に射影し、前記各運転データごとに運転させる前記プラントの前記評価値をZ軸とした3次元グラフとして、前記マップデータを表示することを特徴とする
請求項1ないし請求項5のいずれか1項に記載のプラント操作支援装置。 - プラント操作支援装置は、目標抽出部と、経路決定部と、表示部とを有しており、
前記目標抽出部は、制御対象のプラントから計測されたデータ、および、前記プラントを制御するための入力データのうちの少なくとも1つのデータである運転データについて、その運転データの大小関係をもとにカテゴリに分類し、各カテゴリのプラント状態ごとに運転させることで得られるプラント性能を前記プラントの評価値として算出し、
n次元(n≧4)の各運転データのカテゴリをXY平面上にマッピングすることで、現在の運転データがマッピングされるXY平面上の第1位置から前記各運転データがマッピングされるXY平面上の第2位置までの距離を空間距離として算出し、
それぞれ算出した前記評価値および前記空間距離をもとに、目標とする運転データの候補を複数個抽出し、
前記経路決定部は、抽出された前記運転データの候補ごとに、前記現在の運転データから前記目標とする運転データへと至る操作内容を操作経路として、各候補の前記操作経路を通過する運転データから得られるプラント性能に応じて評価することで、採用する前記操作経路およびその操作経路の終点である前記目標とする運転データを決定し、
前記表示部は、前記操作経路の始点となる前記運転データから前記目標とする運転データまでの前記操作経路を、マップデータとして表示することを特徴とする
プラント操作支援方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017133806A JP6927770B2 (ja) | 2017-07-07 | 2017-07-07 | プラント操作支援装置、および、プラント操作支援方法 |
| MYPI2018001170A MY193844A (en) | 2017-07-07 | 2018-06-28 | Plant operation support system and plant operation support method |
| EP18180703.3A EP3441828A3 (en) | 2017-07-07 | 2018-06-29 | Plant operation support system and plant operation support method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017133806A JP6927770B2 (ja) | 2017-07-07 | 2017-07-07 | プラント操作支援装置、および、プラント操作支援方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019016214A JP2019016214A (ja) | 2019-01-31 |
| JP6927770B2 true JP6927770B2 (ja) | 2021-09-01 |
Family
ID=62837687
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017133806A Active JP6927770B2 (ja) | 2017-07-07 | 2017-07-07 | プラント操作支援装置、および、プラント操作支援方法 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3441828A3 (ja) |
| JP (1) | JP6927770B2 (ja) |
| MY (1) | MY193844A (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11327121B2 (en) * | 2019-04-03 | 2022-05-10 | Transportation Ip Holdings, Llc | Deviation detection system for energy storage system |
| JP7183131B2 (ja) * | 2019-09-11 | 2022-12-05 | 日立造船株式会社 | 情報処理装置、運転支援システム、情報処理方法、および情報処理プログラム |
| JP7413205B2 (ja) * | 2020-08-21 | 2024-01-15 | 株式会社日立製作所 | 自律管制制御装置、自律管制制御システム、および設計方法 |
| US12510869B2 (en) * | 2022-04-26 | 2025-12-30 | Transportation Ip Holdings, Llc | Shift detection system and method for a power supply system |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59127105A (ja) * | 1983-01-10 | 1984-07-21 | Hitachi Ltd | プラントの運転ガイド提示装置 |
| US5155677A (en) * | 1989-11-21 | 1992-10-13 | International Business Machines Corporation | Manufacturing process optimizations |
| JP4043879B2 (ja) * | 2002-07-24 | 2008-02-06 | 三菱電機株式会社 | プラント最適運転制御装置 |
| JP4600081B2 (ja) * | 2005-02-24 | 2010-12-15 | 横河電機株式会社 | 操作支援システムおよび操作支援方法 |
| JP5410480B2 (ja) * | 2011-08-04 | 2014-02-05 | 株式会社日立製作所 | プラントの制御装置 |
| CN104937506A (zh) * | 2013-01-17 | 2015-09-23 | 丰田自动车株式会社 | 设备控制装置 |
| US20160231716A1 (en) * | 2015-02-10 | 2016-08-11 | General Electric Company | System of systems optimizing control for achieving performance and risk outcomes in physical and business operations of connected and interrelated industrial systems |
| EP3104240A1 (de) * | 2015-06-11 | 2016-12-14 | Siemens Aktiengesellschaft | Einrichtung und verfahren zur optimierung eines arbeitspunktes für den betrieb einer anlage |
-
2017
- 2017-07-07 JP JP2017133806A patent/JP6927770B2/ja active Active
-
2018
- 2018-06-28 MY MYPI2018001170A patent/MY193844A/en unknown
- 2018-06-29 EP EP18180703.3A patent/EP3441828A3/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019016214A (ja) | 2019-01-31 |
| MY193844A (en) | 2022-10-28 |
| EP3441828A3 (en) | 2019-03-06 |
| EP3441828A2 (en) | 2019-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10360217B2 (en) | Event based data collection, integration, and presentation | |
| JP5133681B2 (ja) | プロセスプラントで使用するための統合構成システム | |
| EP3482261B1 (en) | Computer system and method for the dynamic construction and online deployment of an operation-centric first-principles process model for predictive analytics | |
| JP6927770B2 (ja) | プラント操作支援装置、および、プラント操作支援方法 | |
| JP6682411B2 (ja) | プラント状態表示装置、プラント状態表示システム、及びプラント状態表示方法 | |
| JP5684941B1 (ja) | 異常予兆診断装置及び異常予兆診断方法 | |
| US10198159B2 (en) | Multi-context sensor data collection, integration, and presentation | |
| JP2020102115A (ja) | エンジニアリング支援システム及びエンジニアリング支援方法 | |
| EP2827203B1 (en) | Method for generating plant topology model data | |
| CN111527459A (zh) | 用于识别工厂模型中的变化的设备、方法和程序 | |
| JP6654119B2 (ja) | プラントデータ表示処理装置及びプラント制御システム | |
| JP2018147360A (ja) | プラントデータ分類装置、プラントデータ表示処理装置及びプラント制御システム | |
| CN110162743A (zh) | 一种基于k邻域非线性状态估计算法的数据治理方法 | |
| JP7283105B2 (ja) | 分析装置および分析方法 | |
| JP2021192137A (ja) | 品質影響因子特定支援装置および方法 | |
| CN115081175B (zh) | 解析装置、解析方法以及记录有程序的计算机可读介质 | |
| JP2016133879A (ja) | エンジニアリング支援装置、方法、及びプログラム | |
| JP7151312B2 (ja) | 制御システム | |
| JP7095744B2 (ja) | 予測状況可視化装置、予測状況可視化方法および予測状況可視化プログラム | |
| JP6458157B2 (ja) | データ分析装置および分析方法 | |
| JP6604455B1 (ja) | 表示制御方法、表示制御装置およびプログラム | |
| EP3521960A1 (en) | Tag identification device, tag identification method, and non-transitory computer readable storage medium | |
| CN111108455A (zh) | 数据分类装置 | |
| JP2007057065A (ja) | 管網解析装置及び管網解析方法 | |
| JP6453073B2 (ja) | データ入力支援装置及びデータ入力支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210720 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210805 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6927770 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |