本発明は、多くの異なる形態での実施形態が可能であるが、本開示は、本発明の原理の例示としてみなされるべきであり、かつ本発明を例示する具体的な実施形態に限定するようには意図されていないということを理解して、本発明の具体的で例示的な実施形態が図面に示されかつ本明細書において詳細に記載される。これに関して、本発明に一貫する少なくとも1つの実施形態について詳細に説明する前に、本発明は、上述しかつ後述し、図面に示し、又は例に記載する構造の詳細及び構成要素の構成にその適用が限定されないことが理解されるべきである。本発明と一貫する方法及び装置は、他の実施形態が可能であり、様々な方法で実施され実現されることができる。また、添付の要約書とともに本明細書で採用する専門語及び術語は、説明を目的とするものであり、限定するものとみなされるべきではないことが理解されるべきである。
上記で述べたように及び以下でより詳細に論じるように、複数の代表的な静電ミラープリズム配置の選択された静電ミラープリズム配置を使用する、TOF−MS装置100、100A及びシステム200、200Aの代表的な実施形態は、運動エネルギーの選択可能でかつ比較的狭いバンドを有するイオンビームを生成するために、(パルス化)イオンビームを構成するイオンの運動エネルギーを選択及び/又は制御することができる。また、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、種々のシステムの実施形態において、選択可能な又は構成可能な飛行時間及びTOF収束を提供し、複数のTOF収束及びタンデム動作を含むことができる。また、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、無収差イメージングを可能にするために、検出時にイオンビームの空間情報を選択的に保存する。さらに、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、これらの種々の特徴についてそして種々の組合せで、TOF−MS装置100、100A及びシステム200、200Aの実施形態を選択的に動作させる又は構成するために、マルチモード動作が可能である。最後に、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、他のTOF−MSデバイスと比較して、超高質量分解能と有意に改善された精度との両方を提供する。
図2は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOF−MSシステム200の実施形態を示すブロック図である。図3は、TOF質量分析器100装置の第1の代表的な実施形態として代表的なTOF質量分析器100A装置の実施形態を示し、かつ、TOF−MSシステム200の第1の代表的な実施形態として代表的なTOF−MSシステム200Aの実施形態を示すブロック図である。図4は、静電ミラープリズム150の配置済みの又は構成済みの第1の実施形態を有する、代表的なTOF質量分析器100A装置の実施形態及び代表的なTOF−MSシステム200Aの実施形態について、代表的な静電ミラープリズム配置145を示す断面概略平面図である。図5A及び図5Bは、図5Aにおいて、代表的なTOF質量分析器100装置の実施形態に提供される1次イオンビーム(又は出力ビーム)の断面を示し、図5Bにおいて、代表的なTOF質量分析器100、100A装置の実施形態内の静電ミラープリズム150によって空間分散された2次イオンビームの断面を示す断面概略図である。図6は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOF−MSシステム200の実施形態における代表的な静電ミラープリズム150内で印加される代表的な電位を示すグラフ図である。図7は、静電ミラープリズム150の相互の幾何学的配置に応じて、再結合済みの及び/又は収束性の3次イオンビーム又は更に空間分散済みの若しくは発散性の3次イオンビームを発生するために、代表的な静電ミラープリズム150の対応する角度オフセットがある状態での、代表的な空間分散済みの2次イオンビームを示す断面概略平面図である。図8A及び図8Bは、図8Aにおいて、代表的なTOF質量分析器100装置の実施形態及び代表的なTOF−MSシステム200、200Aの実施形態について代表的なバンドパスフィルター(又は、フィルターシステム)140を示し、図8Bにおいて、エネルギーバンドパス制御スリット255を形成する代表的な摺動板142を示す等角図である。
図2及び図3を参照すると、代表的なTOF−MSシステム200、200Aは、TOF質量分析器100装置と、イオン検出器120と、パルス化イオン源105とを備える。代表的なTOF質量分析器100、100A装置の実施形態は、イオン検出器120に結合される少なくとも1つの静電ミラープリズム配置145、300、400、405、410、415、430、440、450、又は500を備える。静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500は、「ミラープリズム」として本明細書でよぶ少なくとも2つの静電ミラープリズム150を備える。その理由は、以下でより詳細に論じるように、それぞれのこうした静電ミラープリズム150が、同時に、到来イオンビームを反射し、また同様に、その運動エネルギーに従ってイオンビームのイオンを発散(又は逆に、焦点の収束)させるからである。同様に、以下でより詳細に論じるように、代表的なTOF−MSシステム200、200Aは、同様に任意選択で、プロセッサ130と、メモリ125と、及びネットワークインターフェース(「ネットワークI/F(network I/F)」)135とを有するコンピューティングデバイス132も備えることができる。
図2〜図8を参照すると、代表的なTOF質量分析器100装置の実施形態及び代表的なTOF−MSシステム200、200Aについて、それぞれの代表的な静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500は、少なくとも2つの静電ミラープリズム150を備え、少なくとも2つの静電ミラープリズム150は、互いから所定の距離「D」(静電ミラープリズム150の任意の対応する場所の間で測定することができる)だけ離間するように、対として配置又は構成され、また、互いから所定の角度オフセット「φ」を有するように更に配置又は構成される。図3及び図4に示すように、代表的なTOF質量分析器100A装置の実施形態について、第1の静電ミラープリズム配置145は、第1の静電ミラープリズム1501及び約90度の所定の角度オフセットφを有する第2のミラープリズム1502として図4に示す少なくとも2つの静電ミラープリズム150を備える。代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOF−MSシステム200、200Aについて、代表的な静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500は、以下でより詳細に論じるように、第1の静電ミラープリズム1501と第2の静電ミラープリズム1502との間に配置又は構成されるバンドパスフィルター140も備えることができる。
同様に、以下でより詳細に論じるように、種々の代表的な静電ミラープリズム150配置145、300、400、405、410、415、430、440、450、500は、更なる静電ミラープリズム150を、対毎に、ともに採用される2つの静電ミラープリズム150単位で備えてもよく、静電ミラープリズム150は、互いから所定の距離「D」(190)だけ離間するように、対として配置又は構成され、また、互いから所定の角度オフセット「φ」(195)を有するように更に配置又は構成され、それらの値はともに、静電ミラープリズム150のそれぞれのこうした対の2つの間で及び3つ以上の間で同じである又は異なるものとすることができる。また、種々の代表的な静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500の任意の配置は、図27を参照して以下で示し論じるような、1つ以上のリフレクトロン420、425等の他の構成要素も備えることができる。また、種々の代表的な静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500の任意の配置は、図29を参照して以下で示し論じるような、タンデム動作のための代表的なTOF−MSシステム200、200Aの実施形態を構成する他の構成要素も備えることができる。
所定の距離「D」190は、何らかの方法で測定することができ、また、示すように、第1の静電ミラープリズム1501及び第2のミラープリズム1502の後(すなわちリア)電極のそれぞれの中心170から、横断「x」軸に沿って測定される。同様に、所定の角度オフセットφ195も、何らかの方法で測定することができ、また、示すように、第1の静電ミラープリズム1501及び第2のミラープリズム1502のそれぞれの前平面すなわち第1の(すなわち前)電極165から(又は同等に、第3のすなわち後電極155から)延在するラインを使用して横断x−y平面に沿って測定される。図4に示すように、第1の静電ミラープリズム1501と第2のミラープリズム1502との間の所定の角度オフセットφは、例えば、限定することなく、約九十度(90度)であり、他の所定の角度オフセットが、図9〜図11及び図26を参照して以下で示され論じられる。この構成において、静電ミラープリズム150は、直角イオンミラープリズム(「RAIMP:right angle ion mirror prism」)であり、エネルギーフィルタリング機能を最大化している。その理由は、バンドパスフィルター140にわたる空間内で異なる運動エネルギーを有するイオンを分散させるその能力が、他の角度オフセットφを有する静電ミラープリズム配置145、300、400、415、430、450、500の中で最大であるからである。
以下でより詳細に論じるように、代表的なTOF質量分析器100、100A装置の実施形態は、イオンがイオン検出器120まで移動することを可能にし、対応する質量は、(その異なる質量対電荷(m/z)比に起因する)異なる飛行時間に基づいて決定される。イオン検出器120は、通常、プログラム式プロセッサ130等の他の処理デバイスとともに、検出システムとして、イオン信号強度を測定し(すなわち、イオンを計数し)、各イオンがイオン検出器120に到着する(衝突する)時刻を記録する。幾つかの実施形態において、イオン検出器120は、イオン衝突の場所も測定し記録することになる。幾つかの実施形態において、代表的なTOF質量分析器100、100A装置は、マルチパルス化(又は多重化)レートで動作し、イオンの複数のパケットが、第1の到来イオンビーム220として提供される。こうしたイオン検出器120は、MS技術において知られているように実装されてもよい。イオン検出器120は、当業者によって認識されるように、イオン信号を生じ、イオン信号は、その後、プロセッサ130によって利用されて、m/z比がそれから相関される実際の飛行時間を計算し、試料原子又は分子を記述する質量スペクトルを構築する。
MCP板又は電子増倍管等のイオン検出器120は、イオン電流を検出するが到着時刻を検出しない。到着時刻は、プロセッサ130内で具現化されるような、時間−デジタル変換器又は信号デジタイザー等のデータ取得ハードウェアによって検出される。このハードウェアは、イオン検出器120によって増幅されたイオン電流によって機能する。
本開示の幾つかの実施形態において、イオン検出器120は、マルチチャネルイオン検出器であり、以下で論じる無収差イメージング能力において使用するため等で、位置敏感型とすることができる。こうしたマルチチャネルイオン検出器は、複数のチャネルであって、各チャネル又はピクセルが検出器面上の離散的検出エリア又はスポットに対応する、複数のチャネルにわたって、質量識別イオンの束(又は電流)を収集し測定するために構成される。こうしたイオン検出器120は、検出スポットにおけるイオンの衝突を検出し、それを、独立した電子シャワーに変換することが可能であり、電子コレクタ(陽極)へのその電流は、電気信号として測定することができる。マルチチャネル検出器の1つの例は、マイクロチャネルプレート(MCP:micro-channel plate)検出器である。位置敏感型イオン検出器として設けられると、こうしたイオン検出器120(MCP技術に基づく)は、電子コレクタ上の複数の位置で複数の独立した測定を行い、したがって、各検出(イオン衝突)スポットについて独立した測定信号出力を発生することが可能である。他の実施形態において、イオン検出器120は、TOF−MS用途について最適化された電子増倍管(EM)であり得る。
代表的なTOF−MSシステム200、200Aは、第1のすなわち1次のイオンビーム220をTOF質量分析器100、100Aに提供するパルス化イオン源105(任意選択で、任意のイオン光学系、イオンガイド、又はイオン加速器を含むことができる)を更に備えることができる。イオンを発生するイオン源の実施形態は、分光法のための分析物イオンを生成するのに適する任意のタイプの連続ビーム又はパルス化イオン源とすることができるが、TOF質量分析器100、100Aに提供されるように、第1のすなわち1次のイオンビーム220は、イオンの1つ以上のパルス又はパケットから構成され、すなわち、パルス化イオンビームであり、既知のパルス化イオン抽出光学系又は変調等の任意の機構を使用して実装することができる。実装されるイオン化のタイプに応じて、パルス化イオン源105は、真空チャンバー内に配置することができ、又は、大気圧で若しくは大気圧の近くで動作することができる。典型的なイオン源105は、例えば、限定することなく、電子イオン化(EI)源、化学イオン化(CI)源、光イオン化(PI)源、エレクトロスプレーイオン化(ESI)源、大気圧化学イオン化(APCI)源、大気圧光イオン化(APPI)源、フィールドイオン化(FI)源、プラズマ又はコロナ放電源、レーザー脱離イオン化(LDI)源、及びマトリクス支援レーザー脱離イオン化(MALDI)源を含むことができる。幾つかのシステムの実施形態において、パルス化イオン源105は、同じタイプ又は異なるタイプとすることができる2つ以上のイオン化デバイスを含むことができる。分析される試料材料は、上記で論じたイオン源の多くによるものを含む、任意の適した手段によってパルス化イオン源105に導入することができる。
上記で述べたように、パルス化イオン源105は、本明細書で使用するとき、一般に、以下でより詳細に例として述べるもの等の、任意のイオン光学系又はイオンガイドも含むことができる。同様に上記で述べたように、代表的なTOF−MSシステム200、200Aの実施形態は、以下でより詳細に例として述べるもの等の、プロセッサ130と、メモリ125と、及びネットワークインターフェース135とを有するコンピューティングデバイス132を更に備えることができる。プロセッサ130は、マルチモード動作のため、及び、飛行時間「T」を選択及び制御するときに使用するため等で、本明細書で述べるTOF−MSシステム200、200Aの種々の機能態様を制御、モニター、及び/又は計時するように適合される又はそのために構成される。こうしたコンピューティングデバイス132は、例えば、限定することなく、ネットワークコンピューター、メインフレームコンピューター、デスクトップコンピューター、ラップトップコンピューター、ポータブルコンピューター、タブレットコンピューター、ハンドヘルドコンピューター、モバイルコンピューティングデバイス、携帯情報端末(PDA)、スマートフォン等とすることができ、又はこれらにおいて具現化することができる。また、プロセッサ130は、以下に述べる、代表的な静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500の静電ミラープリズム150及び他の構成要素に印加される電圧を含む、TOF−MSシステム200、200Aの種々の構成要素に対する電圧を印加するために、必要に応じて、全ての電圧源(別々には示さず)、及び、タイミングコントローラー、クロック、周波数/波形発生器等を制御することもできる。また、プロセッサ130は、イオン検出器120からイオン検出信号を受信し、分析下の試料を特徴付けるクロマトグラム、ドリフトスペクトル、及び質量(m/z比)スペクトルを発生するために、必要に応じて、データ取得及び信号分析に関連するタスクを実施するように適合又は構成することもできる。例えば、限定することなく、プロセッサ130は、当該技術分野で知られているように、質量較正方法を適用し、イオン質量を計算するように適合又は構成することもできる。例えば、限定することなく、プロセッサ130は、分光分析データ及び他のデータのスクリーンディスプレイを提供し、ユーザー入力を受信するユーザーインターフェース(別々には示さない)を制御するように適合又は構成することもできる。全てのこうした目的で、コンピューティングデバイス132は、ネットワークI/F135を介して、有線又は無線通信リンクによってTOF−MSシステム200、200Aの種々の構成要素と通信することができる。コンピューティングデバイス132の種々の構成要素は、同様に以下でより詳細に論じられる。
本開示のために、パルス化イオン源105について必要とされる全てのことは、運動エネルギーフィルタリングを全く必要とすることなく、第1のすなわち1次の(パルス化)イオンビーム220としてTOF質量分析器100、100Aに提供されるパルス化イオンビームをパルス化イオン源105が発生することである。したがって、第1のすなわち1次の(パルス化)イオンビーム220は、広い範囲の運動エネルギーを有する、パケット又はパルス内の複数のイオンとすることができ、一般に、それらから構成される。
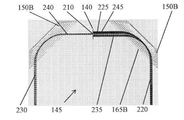
静電ミラープリズム150のそれぞれは、ターンオンされ、イオンを偏向するために静電バイアスされると、静電ミラープリズム150の電極155、160、165に印加される対応する電圧を使用して減速電界を提供する。高い質量分解能のために減速電界を整形するために、静電ミラープリズム150は、図4及び図6に示すように、少なくとも1つのイオン透過電極160(例えば、格子又は格子なしでかつ開口312を有する)を使用して、フィールドを少なくとも2つの異なる領域に分離することができ、第1の領域236は第1の勾配を有する電界を有し(図6のライン221を使用して示す)、第2の領域238は第2の勾配を有する第2の電界を有し(図6のライン222を使用して示す)、第1の勾配は第2の勾配より大きい。代替的に、静電ミラープリズム150は、以下で論じる種々の実施形態について示すように格子なしであるものとすることができる。議論を容易にするため、静電ミラープリズム150が動作する方法の説明は、比較的単純な幾何形状を使用し、2つの電極155、160は印加電圧を有し、第1の前電極165はグラウンド電位を有する。例えば、図6に示すように、第1の(最小の)電圧224(グラウンド電位(ゼロ)等の電圧レベル「H」を有する)は第1の前電極165(格子電極として図4において断面で示す)に印加され、第2の電圧226(電圧レベル「I」を有する)は第2の中央電極160(同様に、格子電極として図4において断面で示す)に印加され、第3の(最大の)電圧228(電圧レベル「J」を有する)は第3の後電極155(固体平面電極として図4において断面で示す)に印加される。静電ミラープリズム150内で利用される電極の数に応じて、1つ以上の更なる電圧が、それぞれの対応する中間電極(すなわち、第1の電極165と後電極155との間に位置する任意の1つ以上の電極)に印加されることになる。抵抗分圧器等の既知の構造を利用して、静電ミラープリズム150の種々の電極にこれらの異なる電圧を供給することができ、対応する電圧並びに電極形状、構成、及びレイアウトが、結果として得られる電界を整形するために利用される。図には別々に示さないが、種々の電極155、160、165は、抵抗器又は他の抵抗構成要素によって互いから分離することができ、また更に、通常、種々の絶縁体又は他の誘電材料を使用して等で、任意のハウジング又は外囲器(通常、グラウンド電位で設けられる)から電気絶縁される。
代表的な実施形態において、新規な特徴として、密接して位置決めされた幾つかの電極155、160、165の組に基づいて、直角イオンミラープリズムとして構成されるような静電ミラープリズム150は、幾つかの目的で、すなわち、イオン偏向のため、(例えば、TOF−MS分析器100内での)飛行時間収束のため、また更に、運動エネルギーにわたるイオンの分離(例えば、静電プリズム)のために利用される。図3、図4、及び図9〜図15に示すように、静電ミラープリズム150の幾何形状は、例えば、限定することなく、平面/長方形、例えば、長方形ボックスの形状、平行六面体、台形(図3、図4、図10〜図12、図14〜図18)、又は円筒(図9、図13)とすることができる。図3及び図4に示すように、第1のすなわち1次のイオンビーム220は、例えば、限定することなく、減速電界平面に対する垂線から45度の入射角度で第1の静電ミラープリズム1501に入ることができる。そのため、第1のすなわち1次のイオンビーム220は、この減速電界平面からの「イオンの跳ね返り」の事象に似ており、第1の静電ミラープリズム1501の主対称軸は、パルス化イオン源105によって提供される第1のすなわち1次のイオンビーム220の主対称軸に対して45度だけ回転させることができる。
減速電界の使用は、静電ミラープリズム150をイオンミラーとして動作させ、リフレクトロンが行うようにかなり鋭い角度内で戻るようイオンを反射する代わりに、静電ミラープリズム150は、イオンのセクター角度及び運動エネルギーに応じて或る特定の角度だけイオンを偏向させる。図3及び図4の構成について示すように、静電ミラープリズム150は、イオンを90度だけ偏向させ、それにより、直角イオンミラーとして働く。同時に、第1の静電ミラープリズム1501は、反射したイオンを、その運動エネルギーに対応する空間分解済み平行ビームに分離し、それにより、静電プリズムとして働く。静電ミラープリズム150のこの構成は、TOF−MS分析において新しい能力及び機能を可能にする。
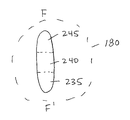
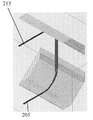
図4を参照すると、第1のすなわち1次のイオンビーム220(パルス化され、通常、コリメートされた、すなわち平行なものであり、或る範囲の運動エネルギーを有するイオンを有する)は、TOF質量分析器100、100Aに入り、第1の入力(すなわち初期)TOF焦点(又は焦点面)205、すなわち、異なる運動エネルギーを有するが同じ質量及び電荷のイオンの同時到着ポイント、すなわち、イオンパケットオリジネーション面を有する。第1のすなわち1次のイオンビーム220は、第1の静電ミラープリズム1501に入り、(この場合、90度だけ)偏向されて、第2の(すなわち2次)TOF焦点(又は焦点面)210を有する第2のすなわち2次のイオンビーム225を形成する。さらに、以下でより詳細に論じるように、第2のすなわち2次のイオンビーム225を構成するイオンは、空間分散され、運動エネルギーバンド235、240、245として図4に示す異なる運動エネルギーを有する異なるバンドに分離されている。第2のすなわち2次のイオンビーム225の運動エネルギーバンドの選択のため、バンドパスフィルター140を、第2のTOF焦点210に設置することができる。次に、第2のすなわち2次のイオンビーム225は、第2の静電ミラープリズム1502に入り、(この場合、同様に90度だけ)偏向されて、第3の出力TOF焦点(又は焦点面)215を有する第3のすなわち3次のイオンビーム230を形成する。さらに、以下でより詳細に論じるように、第2のすなわち2次のイオンビーム225を構成する空間分散済みのイオン(その運動エネルギーによる)は、ここで、第3のすなわち3次のイオンビーム230(このイオンビームにおいて、イオンは、もはやその運動エネルギーに従って空間分散していない)になるよう再結合及び/又は収束されており、(第1のすなわち1次のイオンビーム220)のイオンの空間情報は、第3のすなわち3次のイオンビーム230内に保存される。イオン検出器120は、通常、この第3のTOF焦点215に設置されて、第3のすなわち3次のイオンビーム230のイオンの到着時刻(及び/又は位置)を検出する。
更なる静電ミラープリズム150を有する他の代表的な静電ミラープリズム配置300、400、415、430、440、450、500について、イオン検出器120は、第3のTOF焦点215と同じ機能を提供する最後のこうしたTOF焦点に設置される。さらに、静電ミラープリズム150の複数の対が利用される種々のカスケード式静電ミラープリズム配置300、400、415、430、440、450、500について、(1)対を形成する2つの静電ミラープリズム150の間に対応する複数の第2のすなわち2次のイオンビームが存在することになり、それらのビームのそれぞれは、そのそれぞれの運動エネルギーに従って空間分散される又は広がるイオンを有し、それらのビームは本明細書で「中間」イオンビームと呼ばれ、(2)それぞれが対を形成する2つの静電ミラープリズム150の間に存在する、対応する複数の第2の(すなわち2次)TOF焦点(又は焦点面)が存在することになり、それらの焦点は本明細書で「中間」TOF焦点又は焦点面と呼ばれ、バンドパスフィルター140は、これらの中間TOF焦点の任意の焦点に設置することができ、(3)或る対の第2の静電ミラープリズム150によって提供される第3のすなわち3次のイオンビーム230は、次の対の第1の静電ミラープリズム150に対する、到来する第1のすなわち1次のイオンビーム220であることになり、本明細書で、結合式出力−入力ビームと呼ぶことができ、(4)或る対の第2の静電ミラープリズム150によって提供される第3のTOF焦点215は、次の対の第1の静電ミラープリズム150に対する、到来側の第1のすなわち初期のTOF焦点205であることになり、本明細書で、結合式出力−入力焦点と呼ぶことができる。
図5A及び図5Bを参照すると、図4の領域175、180、及び185からの第1、第2、及び第3のイオンビーム220、225、230が示される。図5Aに示すように、第1及び第3のイオンビーム220、230は、全体的にコリメートされたビームであり、全体的に円形の断面を有し、第1のすなわち1次のイオンビーム220の任意の空間情報は、第3のすなわち3次のイオンビーム230内に保存又は維持される。対照的に、図5Bに示すように、第2のすなわち2次のイオンビーム225を形成するイオンは、そのそれぞれの運動エネルギーに従って空間分散されており又は広がっており、(1)高いエネルギーを有するイオンであって、第1の静電ミラープリズム1501内に深く入り、そこに長い期間留まった、イオンは、第2のすなわち2次のイオンビーム225の運動エネルギーバンド245として出て、(2)低いエネルギーを有するイオンであって、第1の静電ミラープリズム1501内に少ない程度で深く入り、そこに短い期間留まった、イオンは、第2のすなわち2次のイオンビーム225の運動エネルギーバンド240として出て、そして、(3)更に低い又は最小のエネルギーを有するイオンであって、第1の静電ミラープリズム1501内に少ない程度で又は最小の程度で深く入り、そこに短い期間又は最短の期間留まった、イオンは、第2のすなわち2次のイオンビーム225の運動エネルギーバンド235として出る。種々の図において、第2のすなわち2次のイオンビーム225は、単に説明を容易にするため、空間分散済みの3つのエネルギーバンド235、240、245を有するものとして示されてきたが、第2のすなわち2次のイオンビーム225が運動エネルギーの連続スペクトルを含むことを当業者は認識するであろう。第2のすなわち2次のイオンビーム225の、個々の運動エネルギーバンド235、240、245(又はより多くの運動エネルギーバンド)への任意の特定の分離は、ユーザー選択可能であり、バンドパスフィルターシステム140を使用して決定することができる。
対を形成する2つの静電ミラープリズム150、及び、第1の入力TOF焦点205から第2の(中間)TOF焦点210を通して第3の出力TOF焦点215まで通過するイオンの軌跡が、色収差の打ち消しを可能にするため全体的に同じ平面内にあることに留意することが重要である。静電ミラープリズム150の間の領域内の第2のすなわち2次のイオンビーム225における異なるエネルギーを有するイオンの空間分散は、図5Bにおいて断面で示す「エネルギー分散平面」と呼ぶ同じ平面内で起こる。
代表的な実施形態によれば、第2の(すなわち中間の)TOF焦点210は、例えば、図8に示すエネルギーバンドパス制御スリット(アパーチャすなわち開口)255(調整可能とすることができる)を有するバンドパスフィルター140を配置又は設置するための所望の場所を提供して、望ましくないエネルギーを有するイオンをカットオフし、したがって、TOF質量スペクトルピークの「尾部」を抑制し、そして、イオン飛行経路に沿うフラグメンテーション又は複数の散乱に起因して形成される低エネルギーイオンをフィルタリング除去する。こうしたバンドパスエネルギーフィルタリングについて、代表的な実施形態において並びに図8A及び8Bに示すように、例えば、プロセッサ130の制御下でかつバンドパスフィルター140内で構成可能であるように、エネルギーバンドパス制御スリット255は、(例えば、第1及び第2の可動板142であって、同様に可動位置を有してもよく、ともに、(マイクロメーターを使用して等で)手動で、又は、真空若しくは(サーボモーター等の)モーター144によって自動で調整されて、スリット255幅及びバンドパスフィルター140の位置を制御してもよい、第1及び第2の可動板142を使用して)調整可能な及び/又は移動可能な幅を有して、エネルギーバンドパス制御スリット255の幅146を増加又は減少させる、及び/又は、フィルター140を移動させ、第2のすなわち2次のイオンビーム225をより多く又はより少なく相応して選択する。代表的な実施形態において、それぞれが「knife edge」として機能する固体モリブデンで構成される可動板142が利用される。可動板142は、図8Aに示すように搭載され、それぞれは、精密な位置決めのためマイクロメーターを装備する別個の真空直線運動フィードスルーを通して制御される。これらの可動板142は、スリット255を形成し、スリット255の幅及び位置は、次の通りに精密に調整することができる。すなわち、(1)可動板142を離して移動させることによりスリット255を開口し、その逆も同様であり、一方、(2)スリット255の幅を拡張することを伴って又は伴わずに、運動エネルギーバンド235、240、245のうちの1つ以上又はその一部を選択するため等で、可動板142を同じ方向に移動させることにより、その位置をイオンビームに対して中間TOF焦点210に並進させる。
結果として、バンドパスフィルター140(調整可能な幅146を有するエネルギーバンドパス制御スリット255を有し、また同様に、選択される実施形態に応じて、場合によっては移動可能である)を使用することは、運動エネルギーバンド235、240、245のうちの1つ以上又はその一部を選択すること等、最適に狭い又は広い範囲のイオンエネルギーを選択することを可能にする。これは、代表的なTOF質量分析器100、100A装置及びTOF−MSシステム200、200の実施形態の信号対雑音比及び有効質量分解能を改善するのに役立つ。種々の例は、以下でより詳細に示され論じられる。
例えば、代表的なTOF質量分析器100、100A装置の実施形態についての第2のすなわち2次のイオンビーム225の代表的なバンドパスエネルギーフィルタリングは、図21に示され、最大及び最小の運動エネルギーを有するイオンがフィルタリング除去され、(バンド240内の)より中間の運動エネルギーを有するイオンだけがバンドパスフィルター140を通過する。同様に例えば、代表的なTOF質量分析器100、100A装置の実施形態についての第2のすなわち中間のイオンビーム225、340の代表的なバンドパスエネルギーフィルタリングは、図29に示され、最大及び最小の運動エネルギーを有するイオンが最初にフィルタリング除去され、(バンド240内の)より中間の運動エネルギーを有するイオンだけが第1のバンドパスフィルター140Aを通過し、一方、中間イオンビーム340の異なるエネルギーの全てのイオンは、示すように、より広いアパーチャ又はスリット幅を有する第2のバンドパスフィルター140Bを使用して通過することを許可される。
動作時、イオンは、静電ミラープリズム150の減速電界領域に貫入し、最も深いポイントでその初期エネルギーの約半分になるまで減速され、出口ポイントで同じエネルギーに戻るように加速される。減速フィールド内でのイオンの軌跡は、例えば、一部の静電ミラープリズム150について(及び、その構成及び印加電圧に応じて)1円周の4分の1に類似しており、その半径は、静電ミラープリズム150の寸法及びその電極155、160、165に印加される電位に依存する。中央電極(格子)160と後電極(板)155との間のセクションの寸法及び電気構成は重要である場合がある。同じ寸法及び電位分布について、異なるエネルギーを有するイオンは、異なる回動半径を有するが、重要なことには、90度の同じ回動角度を有することになる。このことの幾つかの重要な結果は、以下の通りである。
(1)軌跡の長さは、イオンビーム内のイオンの運動エネルギーに依存することになる、すなわち、軌跡の長さは、(その小さな回動半径に起因して)より低いエネルギーについてより短く、そして、(その大きな回動半径に起因して)より高いエネルギーについてより長い。
(2)単一ビーム(第1のすなわち1次のイオンビーム220)として同じポイント(260)で第1の静電ミラープリズム1501に入る異なるエネルギーを有するイオンは、示すように、空間分散され、異なる出口ポイント(265、270、275)を有し、第2のすなわち2次のイオンビーム225内で平行ビーム又はバンドとして飛行する。これらのビームの側方分散は、イオンエネルギー及び中間電極(格子)160と後電極(板)155との間の空間分離に依存するとすることができる。
(3)空間分散済みの第2のすなわち2次のイオンビーム225から第2の静電ミラープリズム1502に入る異なるエネルギーを有するイオンは、示すように、異なるポイント(280、285、290)で第2の静電ミラープリズム1502に入ることになり、そのとき、最大の運動エネルギーを有する第2のすなわち2次のイオンビーム225の部分(バンド245)が最初に入り(ポイント280)、最小の運動エネルギーを有する第2のすなわち2次のイオンビーム225の部分(バンド235)は最後に入り(ポイント290)、そして、同じ出口ポイント295を有する第3のすなわち3次のイオンビーム230として単一ビームに戻るよう再結合及び/又は収束し、第3のすなわち3次のイオンビーム230内で(運動エネルギーの空間分散なしで)単一ビーム又はバンドとして飛行することになる。
異なる運動エネルギーを有するコリメートされたイオンビームが、第1のすなわち初期のTOF焦点205(例えば、ゼロ時間)に対応する平面から、かつ、第1の静電ミラープリズム1501に向かうその運動に垂直に発生する場合、より大きい運動エネルギーのイオンがより高い速度を有するが、第1の静電ミラープリズム1501内でより長い時間を費やし、より小さな運動エネルギーのイオンがより低い速度を有するが、第1の静電ミラープリズム1501を早期に(すぐに)出る状態で、第1の静電ミラープリズム1501を通過した後、平行ビームとして飛行するこれらのイオンは、或る時間及び或る距離において、これらのイオンが(ほぼ)同時に交差することになる第2のすなわち2次のTOF焦点210、すなわち、第1の静電ミラープリズム1501から出るその運動に垂直な平面を生成することになる。(RAIMPを使用する)静電ミラープリズム配置145について、第1のすなわち初期のTOF焦点(又は平面)205及び2次のTOF焦点(又は平面)210は互いに直交することになる。第2のすなわち2次のTOF焦点210の位置は、(メジアン)イオンビームエネルギーに依存することになり、第1の静電ミラープリズム1501について適切な寸法及び電位分布を選択することによって制御することができる。同じ一定電位について、第1の静電ミラープリズム1501のこれらの寸法が大きければ大きいほど、第2のすなわち2次のTOF焦点210は、第1の静電ミラープリズム1501から益々遠い距離にあるはずである。同じ一定寸法について、第2のすなわち2次のTOF焦点210の位置の微細な調整は、中間電極160及び後電極(板)155の電位を変動させることによって行うことができる。
また、装置100、100A及びシステム200、200Aは、不完全にコリメートされた(すなわち、わずかに拡散又は収束する)入力又は到来イオンビームを用いて機能することができることが留意されるべきである。こうした場合、入力又は到来イオンビームが拡散性であればあるほど、イオンイメージング能力において多くの非点収差が見られることになる。しかし、この非点収差は、TOF収束能力を打ち消さず、TOF収束能力はわずかに低下するのみである。結果として、装置100、100A及びシステム200、200Aは、完全にコリメートされた(平行な)イオンビームと不完全にコリメートされた(わずかに拡散又は収束する)イオンビームの両方に適用可能である。
これは、セクターフィールド分析器が或る種のキャパシタ設計(円筒、球、トロイダル等)に基づき、キャパシタの対向する電極板に印加される電圧がグラウンド電位に対して対称である点で、セクターフィールド分析器と有意に異なる。したがって、中心軌跡に沿ってセクターフィールド分析器を通過するイオンは、有意の減速及び加速を受けず、わずかに中心からずれる軌跡についてのこれらのプロセスのわずかな寄与だけを有する。そのため、飛行時間は、ほとんどまったく減速/加速に費やされず、セクターフィールド分析器によってTOF収束を駆動するのは、主に、軌跡の長さの差である。
また、第1及び第2の静電ミラープリズム1501及び1502等、代表的な静電ミラープリズム配置145、300、400、405、410、415、430、440、450、500についての静電ミラープリズム150の各対が、図4に示すように、対称に配置され、第2のすなわち2次のイオンビーム225のイオンの軌跡に直角でかつ第2のすなわち2次の(すなわち中間の)TOF焦点210の領域に位置する対称平面305を有することも留意されるべきである。この対称平面305が第2のすなわち中間のTOF焦点210を精密に通過する場合、第3の出力TOF焦点215の場所は、第1の入力TOF焦点205の場所に対称でありかつその場所をミラーリングすることになる。対称平面305が第2のTOF焦点210からシフトされる場合、第3の出力TOF焦点215は、第1の入力TOF焦点205のミラー場所から相応してシフトされることになる。
第2の静電ミラープリズム1502が、第1の静電ミラープリズム1501に対向してこの対称平面305の他方の側に位置する場合、第2のすなわち2次のイオンビーム225内の異なる運動エネルギーを有する空間分散済みの平行イオンビームは、運動エネルギーの同じ空間分散を持って第2の静電ミラープリズム1502に入る。イオンとこの第2の静電ミラープリズム1502の減速電界との相互作用によって、第2の静電ミラープリズム1502を通過した後に、空間分散は打ち消される。このことは、第1及び第2の静電ミラープリズム1501及び1502が、典型的な従来技術のジグザグ構成で第1のすなわち1次のイオンビーム220を反射するように配置又は構成されるときに生成される更なる空間分散を有して対照的に、図7に示される。
図7に示すように、上記で論じた対称性を使用して、第2の静電ミラープリズム1502Aは、第3のすなわち3次のイオンビーム230Aを発生し、ここで異なる運動エネルギーを有するイオンは、もはや空間分散されず、点線を使用して示すコリメートされたビームに再結合及び/又は収束される。これが起こるために、所定の角度オフセットφは、0度より大きくかつ180度より小さくある(すなわち、0度<φ<180度である)べきである。所定の角度オフセットφは、実際には、90度より大きい可能性があるが、減速電界に貫入するイオンの能力によって制限される場合があるため、達成可能な上限は、約135度の範囲内である可能性が高い。所定の角度オフセットφは、実際には、90度より小さい可能性があるが、相応して減じるプリズマティック能力によって同様に制限される場合があるため、実際には、達成可能な下限は、例えば、限定することなく、約45度の範囲内である可能性が高い。やはり、最大プリズマティック機能は、90度で達成される。その理由は、その所定の角度オフセットφにおいて、異なる運動エネルギーを有するイオンの空間分散が最大であるからである。角度オフセットに対するいずれの参照についても、当業者は、作製公差が存在し得るため、特定の度数に対するいずれの参照も、一般に約1度〜5度の範囲内のこうした公差を意味し、それを含むと理解されることになり、例えば、90度に対する参照が、例えば、限定することなく、90度±5度を意味し、それを含むことになることを認識するであろうことが留意されるべきである。
TOF分析器100、100Aと対照的に、従来技術のジグザグ複数反射構成は、2つの対向する静電ミラーの間の中間で中心イオン軌跡上に位置する回転対称ポイント152を有し、第2の静電ミラープリズム1502Bの位置配置は、回転なしの第2の静電ミラープリズム1502Bの側方変位によって、又は等価的に、図7に示すように、第1の静電ミラープリズム(1501)をこの回転対称ポイント152の周りに180度だけ回転させることによって得られる可能性がある。この場合、第2の静電ミラープリズム1502Bは、拡散する第3のすなわち3次のイオンビーム230Bを発生し、この第3のすなわち3次のイオンビーム230Bは、第2のすなわち2次のイオンビーム225と比較して、異なる運動エネルギーを有する更に大きい増幅されたイオンの空間分散を有する。ジグザグ構成のこの増幅されたイオンの空間分散によって、第3のすなわち出力TOF焦点が全く存在せず、また、無収差イメージングが可能でない。そのため、「ジグザグ(zig-zag)」構成の回転対称を、TOF質量分析器100の構成の平面対称で置換することにより、TOF質量分析器100、100Aの基本的な利点のうちの1つの利点、すなわち、異なる運動エネルギーを有する空間分散ビームの再結合であって、空間情報を保存しながら、新しい(第3のすなわち出力)TOF焦点215に入る全てのエネルギーのイオンを含む単一イオンビームになる、空間分散ビームの再結合をもたらす。
代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、第1及び第2の静電ミラープリズム1501、1502の、それぞれ、更なる対称の代表的な第2、第3、及び第4の静電ミラープリズム配置405、410、440は、図9〜図11において例として示され、図9〜図11は、再結合済みの及び/又は収束性の第3のすなわち3次のイオンビーム230を発生するために、図9において円筒状を、そして、図10及び図11において台形状を有する代表的な静電ミラープリズム150の対応する角度オフセットφがある状態での、代表的な第1のすなわち1次イオンビーム220、代表的な空間分散済みの第2のすなわち2次イオンビーム225を示す断面概略平面図である。
図9、図10、図11、図21、図22A、図22B、及び図22Cが、SIMION8.1イオン光学系モデリングソフトウェアとして知られる、質量分析法開発者用の業界標準ソフトウェアを使用して得られたイオンビーム軌跡(レイトレーシング)を含むことが留意されるべきである。
代表的な「蝶ネクタイ(bow-tie)」の第2の静電ミラープリズム配置405は、比較的小さな所定の角度オフセットφ(比較的最小のプリズマティック機能を提供する)で図9に示され、一方、図10及び図11は、より大きな所定の角度オフセットφを示し、図10は、代表的な第3の静電ミラープリズム配置410について90度より小さい(例えば、約80度)角度オフセットφを示し、図11は、代表的な第4の静電ミラープリズム配置440について90度より大きい(すなわち、90度<φ<180度)(例えば、約100度)角度オフセットφを示す。所定の角度オフセットφ、又は等価的に、各ミラーについての入力の(第1の)イオンビーム220と出力の(第3の)イオンビーム230との間の角度を変更することは、「蝶ネクタイ」を広げ、90度を経て完全にほどくことをもたらし得る。これらの構成のうちの任意の構成は、静電ミラープリズムのプリズマティック機能が最大であるとき、上記で論じた90度の角度オフセットφに加えて、TOF質量分析器100、100Aにおいて等価的に利用することができる。図9の「蝶ネクタイ」構成が、リフレクトロン等の最もよく知られている静電ミラー設計によって動作することができ、したがって、「ジグザグ」に対する代替法として、リフレクトロンの複数反射配置として役立つ可能性があることが重要である。「ジグザグ」に勝る「蝶ネクタイ」の基本的な利点は、第1の反射後に空間分散した異なる運動エネルギーを有するビームを再結合して、第2の反射後に新しい(第3のすなわち出力)TOF焦点215に入る全てのエネルギーのイオンを含む単一イオンビームにする能力である。
また、図9〜図11は、上記で論じた45度の角度に加えて、示した所定の角度オフセットφと(電界に応じて)相関する場合がある、代表的なTOF質量分析器100、100A装置の実施形態内の種々のイオンビームの入射及び反射の更なる利用可能な角度(前電極表面に対する垂線から測定される)も示す。換言すれば、到来する第1のすなわち1次のイオンビーム220の選択される入射角度及び第1の静電ミラープリズム1501内の電界に応じて、第2の静電ミラープリズム1502は、反射される第2のすなわち2次の(すなわち中間の)イオンビーム225を受信するために、対応する所定の角度オフセットφで配置又は位置決めされる必要があることになる。
これらの角度を増加させることは、その反射/減速機能を保存しながら、静電ミラープリズム150の電極上でより低い電位を使用することを可能にする。こうした角度が90度に近づくため、静電ミラープリズム150の形状を、深い円筒(その高さは直径より大きい、図9)からより浅い円筒(その直径は高さより大きい、図13)に変更すること、又は代替的に、静電ミラープリズム150の前断面(すなわち、その電極に平行な平面)を伸張し、その形状を丸形から卵形/楕円形又は長方形(例えば、図10、図11、図12、図14〜図18)に変更することがより好都合である場合がある。重要なことには、これらの所定のオフセット角度φを増加させることは、空間分散済みの第2のすなわち2次のイオンビーム225を再結合して単一出力の第3のすなわち3次のイオンビーム230にする効果を取り除かない。第2のすなわち2次のイオンビーム225内の異なる運動エネルギーを有するイオンの空間分散は、ほぼ90度の角度で最大化され、静電ミラープリズム150のエネルギー分散(プリズマティック)機能は、同様にこうした角度で最大化される。また、静電ミラープリズム150の対についてのこれらの対称構成は、以下でより詳細に論じるように、TOF収束及びエネルギーフィルタリングと組み合わせて無修正側方イメージングを可能にする。
「蝶ネクタイ」複数反射構成において、リフレクトロンのプリズマティック特性は、入口/出口角度が小さいため最小である。その運動エネルギーの広がりによるイオンの空間分散が依然として存在するが、空間分散は、たった1回の反射が起こる場合、比較的わずかであり、複数回の反射によって「増幅」される。
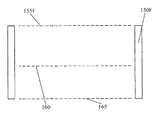
種々の構造及び構成が、同様に、静電ミラープリズム150について利用可能であり、あらゆる全てのこうした変形は本開示の範囲内にある。例えば、限定することなく、静電ミラープリズム150は、任意の数及び配置の電極を有することができ、格子電極を有することができ、固体又は平面電極を有することができ、そして、電極内に種々のスリット又は開口を有することができる。さらに、静電ミラープリズム150は、減速電界の所望の構成を達成するために、任意の対応する構造を有することができる。図12は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、第1及び第2の格子電極165、160及び固体平面の第3のすなわち後の電極155を有する長方形(又は長方形ボックス)静電ミラープリズム150の、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第1の実施形態を示す等角図である。図13は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、第1の格子電極165A(第2の電極160はこの図では別個に示されない)及び固体平面の第3のすなわち後の電極155Aを同様に有する円筒静電ミラープリズム150Aの、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第2の実施形態を示す等角図である。図12及び図13に示すように、各格子電極165A、165Bは、所望の電界を提供するために、対応する印加電圧を有する、一連の、離間し、平行で、比較的薄いワイヤ又は導体を通常備え、一方、種々のイオンが、格子電極を通過し、静電ミラープリズム150に深く入ることを同様に可能にする。
図14は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、第1の格子電極165B(第2の電極160はこの図では別個に示されない)及び固体平面の第3のすなわち後の電極155Bを同様に有する台形静電ミラープリズム150Bの、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第3の実施形態を示す等角図である。図15は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、格子なし長方形静電ミラープリズム150Cの、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第4の実施形態を示す等角図である。図16は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、格子なし台形静電ミラープリズム150Dの、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第5の実施形態を示す等角図である。
図17は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、格子なし長方形静電ミラープリズム150Cの、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第4の実施形態を示す等角断面図である。図18は、代表的なTOF質量分析器100、100A装置について、格子なし台形静電ミラープリズム150Dの、また、代表的な第1の静電ミラープリズム配置145を有する代表的な第5の実施形態を示す等角断面図である。図17及び図18に示すように、静電ミラープリズム150C及び150D等の静電ミラープリズム150の格子なし構成について、各電極310(後電極155を除く)は、所望の電界を提供するために、対応する印加電圧を同様に有する、中心に位置する開口又はスリット312を有する平面導体を通常備え、一方、種々のイオンが、電極310の開口又はスリット312を通過し、静電ミラープリズム150C及び/又は150Dに深く入ることを同様に可能にする。
図19は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、種々の静電ミラープリズム配置のうちの任意の静電ミラープリズム配置で使用するための、また、図27及び図28を参照して以下で示し論じる第8及び第9の静電ミラープリズム配置に特に適する静電ミラープリズム150Eの代表的な第6の実施形態を示す断面図である。静電ミラープリズム150Eは、第3の後電極155Eがイオン透過性である限りにおいて静電ミラープリズム150と異なる。すなわち、静電ミラープリズム150Eは、第3の後電極155E内にスリット又は開口315を有し、スリット又は開口315によって、静電ミラープリズム150Eがオフでありその電極がイオンを偏向させるために静電バイアスされていないときに、イオンビーム(例えば、第2のすなわち2次のイオンビーム225又は第3のすなわち3次のイオンビーム230)が、有意の乱れなしで静電ミラープリズム150Eを通過することが可能になる。
図20は、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、種々の静電ミラープリズム配置のうちの任意の静電ミラープリズム配置で使用するための、また、図27及び図28を参照して以下で示し論じる第8及び第9の静電ミラープリズム配置に特に適する静電ミラープリズム150Fの代表的な第7の実施形態を示す断面図である。静電ミラープリズム150Fは、第3の後電極155Fがイオン透過性である限りにおいて静電ミラープリズム150と異なる。すなわち、静電ミラープリズム150Fは、第3の後電極155Fの格子構成を有し、格子構成は、静電ミラープリズム150Fがオフであり、イオンを偏向させるために静電バイアスされていないときに、イオンビーム(例えば、第2のすなわち2次のイオンビーム225又は第3のすなわち3次のイオンビーム230)が、有意の乱れなしで静電ミラープリズム150Fを通過することを同様に可能にする。
さらに、静電ミラープリズム150C及び静電ミラープリズム150D等の格子なし実施形態のうちの任意の実施形態は、同様に、格子電極又は開口315を有する固体電極等の後イオン透過性電極を有するこれらの配置を使用することができる。
これらの静電ミラープリズム150の寸法が、プリズムを分離する距離「D」とプリズムが反射するイオンの運動エネルギーの両方に依存することが同様に留意されるべきである。
図22A、22B、22C、及び22Dは、代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態について、静電ミラープリズム150を使用し、また、代表的な第1の静電ミラープリズム配置145を有する代表的な無収差イメージングを示す図であり、新規のイメージング複数反射TOF−MS分析器100、100Aを形成し、図22Bは、第1のすなわち初期のTOF焦点205からの六角形ハニカムパターンのイオンイメージを示し、図22Cは、第3のすなわち3次のTOF焦点215内に形成された同じハニカムパターンのイメージを示す。上述したように、第1のすなわち1次のイオンビーム220として第1の静電ミラープリズム1501に入る、異なる運動エネルギーを有するイオンのコリメートされたビームは、第1の静電ミラープリズム1501を出て、第2のすなわち2次のイオンビーム225内で異なる運動エネルギーを有するイオンの平行ビームのセットに分散又は分割される。この第2のすなわち2次のイオンビーム225が、第2の静電ミラープリズム1502内に方向付けられ、第2の静電ミラープリズム1502の位置及び配向が、代表的な第1の静電ミラープリズム配置145等において、第2のすなわち2次のTOF焦点(又は平面)210にわたって第1の静電ミラープリズム1501のミラー反射として配置されると、イオンは、単一のコリメート済みの第3のすなわち3次のイオンビーム230として第2の静電ミラープリズム1502を出ることができる。この第3のすなわち3次のイオンビーム230は、第1のすなわち初期のTOF焦点205と第1の静電ミラープリズム1501への入口との間の距離と同じ、第2の静電ミラープリズム1502の出口からの距離に位置する第3のすなわち3次のTOF焦点面215を形成することができる。さらに、第3のすなわち3次のTOF焦点面215内で、この第3のすなわち3次のイオンビーム230は、第2のすなわち2次のTOF焦点210又は対称平面305に対して互いに対向して指示される矢印213、214によって図22Dに示すように、第1のすなわち初期のTOF焦点205の反転イオンイメージ(第2のすなわち2次のTOF焦点210に対して対称に反転される又はひっくり返される図22B及び図22Cの場合の六角形ハニカムパターン)の構造を有することができる。
初期(入力)TOF焦点(又は焦点面)205を第3のすなわち3次の(出力)TOF焦点(又は焦点面)215上にイメージする代表的な第1の静電ミラープリズム配置145の能力により、第1の静電ミラープリズム配置145を、複数パス(マルチ「リコチェット」)の原理に基づく超高質量分解能及び精度を有する、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態についての無収差イメージングの組立てのための優れた「ビルディングブロック(building block)」とすることができる。そのため、静電ミラープリズム150の複数の対は、全ての直前の対の静電ミラープリズム150の出力TOF焦点が全ての次の対の静電ミラープリズム150の入力TOF焦点として役立つ上記で論じた結合式出力−入力焦点としてのこれらの入力及び出力TOF焦点205、215を介してインターフェースされ、したがって、カスケード配置を生成することができ、幾つかの例が以下でより詳細に論じられる。こうしたインターフェースする(結合式出力−入力の)TOF焦点面上のイオンイメージをその中心の周りで回転させることが、TOF収束に実際に影響を及ぼし、考慮され得るため、カスケード式対の静電ミラープリズム150の相互配向は柔軟性があり得る。例えば、限定することなく、巻かれた、積重ねられた、又は他の2次元及び3次元の空間節約的幾何形状が使用されて、静電ミラープリズム150の対をカスケード接続し、多数のパスを達成し、飛行時間「T」を増加させ、質量分解能「T/ΔT」を改善することができる。代表的なTOF質量分析器100装置の実施形態は、同様に、図1に例示される配置等の直交加速TOF−MS配置に適合することができる。
図23は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、第1のカスケード式配置又は構成で代表的な静電ミラープリズム150Dを有する代表的な第5の静電ミラープリズム配置300を示す等角図である。図24は、図23の代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、第1のカスケード式配置又は構成を有する代表的な静電ミラープリズム150Dを有する代表的な第5の静電ミラープリズム配置300を示す断面図である。上記で述べたように、静電ミラープリズム150は、2つの静電ミラープリズム150の群で対毎に配置される。図23及び図24に示すように、6つの静電ミラープリズム150Dが、カスケード接続されており、すなわち、直列に配置されており、第1の静電ミラープリズム150D1は第2の静電ミラープリズム150D2と対形成され、第3の静電ミラープリズム150D3は第4の静電ミラープリズム150D4と対形成され、第5の第1の静電ミラープリズム150D5は第6の静電ミラープリズム150D6と対形成される。静電ミラープリズム150の1つの対の出力TOF焦点は、結合式出力−入力焦点として静電ミラープリズム150の次の対の入力TOF焦点になる。図12〜図20に示す、静電ミラープリズム配置及び/又は静電ミラープリズムの任意のプリズムを有するTOF分析器100、100Aを有する全てのシステム200、200Aの実施形態が、このカスケード式配置並びに図25及び図26において以下で示す配置に適合することを認識することが重要である。図23及び図24に示すように、7つのTOF焦点205、210、215、320、325、330、及び335、並びに、7つのイオンビーム220、225、230、340、345、350、及び355が存在し、その中で、225、340、及び350は、静電ミラープリズム配置のプリズマティック特性によって空間内で分散するイオンを有し、図5Bに示すビーム断面を有する。
この代表的な第5の静電ミラープリズム配置300は、格子なし静電ミラープリズム150Dの3つの対を使用する複数反射(カスケード)静電ミラープリズム150TOF−MS設計の例である。静電ミラープリズム150の3つの対全てが、同じ「エネルギー分散平面」内に存在し、上記で述べた7つのTOF焦点が存在する。7つのTOF焦点とは、(パルス化イオン源105又は介在する構成要素からの)入力焦点205、異なるエネルギーの空間分散されるイオン用の3つの「中間」焦点210、320、330、静電ミラープリズム150の対又はセット(示すように、第1の対及び第2の対、並びに、第2の対及び第3の対)の間でインターフェースするための2つの結合式出力−入力焦点215、325、及びイオン検出器120が設置され得る最後の出力焦点335である。
図23及び図24に示すように、静電ミラープリズム150Dの第1の対について、第1のすなわち1次のイオンビーム220(第1のすなわち初期のTOF焦点205を有する)は、第1の静電ミラープリズム150D1に入力され、第1の静電ミラープリズム150D1は、第2のすなわち中間の(すなわち、空間分散済みの)イオンビーム225(第2のすなわち2次のTOF焦点210を有する)を、第2の静電ミラープリズム150D2に対して発生し、第2の静電ミラープリズム150D2は、第3のすなわち3次のイオンビーム230(結合式出力−入力焦点として、第3のすなわち3次のTOF焦点面215を有する)を発生する。静電ミラープリズム150Dの第2の対について、第3のすなわち3次のイオンビーム230は、第3の静電ミラープリズム150D3に入力され、第3の静電ミラープリズム150D3は、第4の静電ミラープリズム150D4に提供される次の中間の(すなわち、空間分散済みの)イオンビーム340(中間TOF焦点320を有する)を発生し、第4の静電ミラープリズム150D4は、別のイオンビーム345(別の結合式出力−入力焦点として、TOF焦点面325を有する)を発生し、別のイオンビーム345は、次に、静電ミラープリズム150Dの第3の対に提供され、第5の静電ミラープリズム150D5に入力され、第5の静電ミラープリズム150D5は、第6の静電ミラープリズム150D6に提供される次の中間の(すなわち、空間分散済みの)イオンビーム350(中間TOF焦点330を有する)を発生し、第6の静電ミラープリズム150D6は、別の出力イオンビーム355(出力TOF焦点面335を有する)を発生する。上述したように、イオン検出器120は、通常、この出力TOF焦点面335に位置決めされ、代表的な静電ミラープリズム配置300とともに、別の代表的なTOF質量分析器100装置の実施形態を形成する。この直列カスケード式配置によって、飛行時間「T」は3倍増加しており、一方、最大の半分における質量スペクトルの幅「ΔT」は、複数のTOF収束事象によってほとんど変化しておらず、したがって、質量分解能をかなり増加させる。さらに、異なるエネルギーの空間分散済みのイオンについて3つの中間焦点210、320、330のうちの任意の又は全ての焦点における上述したバンドパスエネルギーフィルタリングの実装は、「ΔT」を更に狭くし、質量分解能を更に改善することになる。
図25は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、第2のカスケード式配置又は構成で代表的な静電ミラープリズム150Dを有する代表的な第6の静電ミラープリズム配置400を示す等角図である。上記で述べたように、静電ミラープリズム150は、2つの静電ミラープリズム150の群で対毎に配置される。図25に示すように、10の静電ミラープリズム150D1〜150D10が、対でカスケード接続されており、すなわち、直列に配置されており、静電ミラープリズム150Dの1つの対の出力TOF焦点は静電ミラープリズム150Dの次の対の入力TOF焦点である。更なる静電ミラープリズム150Dを有することに加えて、代表的な静電ミラープリズム配置400を形成するこの第2のカスケード式配置又は構成は、代表的な静電ミラープリズム配置400が、非平面であり(すなわち、「エネルギー分散平面」とも呼ばれる、示すx−y平面に制限されない)、示すように、z軸に沿って第3の次元に延在する限りにおいて、第1のカスケード式配置又は構成405(代表的な静電ミラープリズム配置300)と異なる。同様に示すように、11のTOF焦点205、210、215、320、325、330、335、360、365、370、及び375並びに、11のイオンビーム220、225、230、340、345、350、355、380、385、390、及び395が存在し、その中で、イオンビーム225、340、350、380、及び390は、静電ミラープリズム配置のプリズマティック特性によって空間内で分散するイオンを有する2次のすなわち中間のイオンビームであり、図5Bに示すビーム断面を有する。上述したように、イオン検出器120は、通常、この最後の出力TOF焦点面375に位置決めされ、代表的な静電ミラープリズム配置400とともに、別の代表的なTOF質量分析器100装置の実施形態を形成する。この直列カスケード配置によって、飛行時間「T」は5倍増加しており、一方、最大の半分における質量スペクトルの幅「ΔT」は、複数のTOF収束事象によってほとんど変化しておらず、したがって、質量分解能をかなり増加させる。さらに、異なるエネルギーの空間分散済みのイオンについて5つの中間焦点210、320、330、360、370のうちの任意の又は全ての焦点における上述したバンドパスエネルギーフィルタリングの実装は、「ΔT」を更に狭くし、質量分解能を更に改善することになる。
図23〜図26に示すカスケード式配置300、400、及び415について、複数のTOF焦点におけるバンドパスエネルギーフィルタリングの実装が、意図されるエネルギーパスバンドの外のエネルギーの減衰をかなり改善することになり、それが、有意に抑制された「尾部」を有する質量スペクトルピークの改善された形状をもたらすことになることを認識することが重要である。
この代表的な静電ミラープリズム配置400は、3次元であり、それにより、エネルギー分散平面の90度の4つの回転が、静電ミラープリズム150Dの対(第1の対及び第2の対、第2の対及び第3の対、第3の対及び第4の対、並びに第4の対及び第5の対)が順次インターフェースされる4つの中間出力−入力焦点215、325、335、365において起こる。これらの中間出力−入力焦点215、325、335、365を通して横断又は飛行するため、異なるエネルギーのイオンが再結合して単一ビームになっているため、これらの焦点における回転が可能であることを認識することが重要である。上述したように、11のTOF焦点が存在する。11のTOF焦点とは、(パルス化イオン源105又は介在する構成要素からの)入力焦点205、バンドパスフィルター140エネルギー制御スリット(複数の場合もある)255が運動エネルギーフィルタリングのために位置決めされ得る、異なるエネルギーの空間分散されるイオン用の5つの中間焦点210、320、330、360、370、4つの結合式出力−入力焦点215、325、335、365、及びTOFイオン検出器120が設置され得る出力TOF焦点375である。
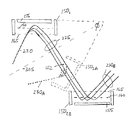
図26は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、第3のカスケード式配置又は構成で代表的な静電ミラープリズム150Dを有する代表的な第7の静電ミラープリズム配置415を示す等角図である。代表的な静電ミラープリズム配置415を形成するこの第3のカスケード式配置又は構成は、代表的な静電ミラープリズム配置415がよりコンパクトである限りにおいて、代表的な静電ミラープリズム配置400と異なる。この代表的な静電ミラープリズム配置415は、代表的な静電ミラープリズム配置400に対する折畳み式3次元等価物であり、エネルギー分散平面の4つの90度回転の代わりに、10度だけの4つの回転が存在するという主要な差を有する。
一般に、図25に示す静電ミラープリズム配置400の他の折畳み式3次元等価物は、これらの回転角度を変更することによって得ることができる。これらの角度の範囲は、機械設計制約によって制限され、一般に、10度(図26の配置415について示す)と180度(図23〜図24の配置300について示す)との間で選択することができる。
図27A、図27B、図27C、及び図27D(総称して、「図27」と呼ぶ)は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、リフレクトロン型設計420、425の更なる第1及び第2の静電ミラー150(「リフレクトロン」と呼ぶ)を有する、代表的な静電ミラープリズム150Fを有する代表的な第8の静電ミラープリズム配置430を示す等角図である。静電ミラープリズム150Eを、同様に、静電ミラープリズム150Fに代わり、この代表的な静電ミラープリズム配置430のために等価的に利用することができる。その理由は、静電ミラープリズム150E及び150Fがともに、図19及び図20に示すように、イオン透過性後電極設計を特徴とするからである。上述したように、静電ミラープリズム150Fが第3の後電極155Fの格子構成を有し、格子構成によって、静電ミラープリズム150Fがオフでありその電極がイオンを偏向させるために静電バイアスされていないときに、イオンビーム(例えば、第2のすなわち2次のイオンビーム225又は第3のすなわち3次のイオンビーム230)が、有意の乱れなしで静電ミラープリズム150Fを通過することが同様に可能になる限りにおいて、静電ミラープリズム150Fは他の静電ミラープリズムと異なる。この実施形態について、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2(並びに場合によっては第1及び第2のリフレクトロン420、425)のオン状態及びオフ状態は、プロセッサ130によって及び/又はより一般的にコンピューティングデバイス132によって制御し、それにより、これらのデバイスによる電界の発生、また相応して、任意の減速電界が発生されるかどうかを制御することができる。リフレクトロン420、425について、オフ状態は必要とされず、リフレクトロン420、425が静電ミラープリズム150F(RAIMP)の外にあり、したがって、イオンが、その主要な動作モードで静電ミラープリズム150Fを通過するときにイオンの軌跡に影響を及ぼさないため、リフレクトロン420、425は、常にオンであるものとすることができることが留意されるべきである。
図27に示す第1及び第2のリフレクトロン420、425のそれぞれは、例えば、限定することなく、静電ミラープリズム150又は静電ミラープリズム150A等の或る型の静電ミラープリズム150として実装することができる。この実施形態について、静電ミラープリズム150、150Aは、示すように、比較的増加した深さを有するように構成され、深さは、前電極165、165Aから後電極155、155Aへの方向又は配向にあり、また更に、静電ミラープリズム150、150Aの中心軸427(すなわち、中心及び深さに沿う垂線)は、図27A及び27Cに示す到来イオンビームと同一広がりを持ちかつ同一配列になるように配向及び配置される(すなわち、イオンビームは、上記で規定したように、ゼロ又は無視できる入射角度を有するべきである)。結果として、リフレクトロン420、425を形成する静電ミラープリズム150、150Aによって減速電界が発生した状態で、到来イオンビームは、リフレクトロン420、425に入り、そのイオンは、完全に停止するまで減速し、それに続いて、反対方向(到来ビームから180度)に加速され、静電ミラープリズム150、150Aから出て、出力イオンビームは、存在する場合、到来イオンビームと同じ運動エネルギー分散を有する。
この代表的な静電ミラープリズム配置430を有する代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態は、幾つかの異なる動作モードを有する。異なる動作モードとは、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2だけを利用する第1の動作モード、及び、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2がともにオフ状態にある状態で第1及び第2のリフレクトロン420、425の両方を使用する第2の「シャトル(shuttle)」動作モードである。これらの種々の動作モードについて、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2は、プロセッサ130の制御下にある遠隔制御式スイッチングシステム(別個に示さず)を一般に通して、オン及びオフされる。
代表的な静電ミラープリズム配置430は、上記で論じた代表的な静電ミラープリズム配置145のため等で、90度の角度オフセットを有する2つの静電ミラープリズム150Fの対を備える。したがって、第1の動作モードについて、第1の静電ミラープリズム150F1は、第1のすなわち初期のTOF焦点205を有する第1のすなわち1次の(到来)イオンビーム220を受信することになり、そして、第1の静電ミラープリズム150F1がオンであり、その電極がイオンを偏向させるために(すなわち、電界を発生することによって)静電バイアスされているときに、第2のすなわち2次のTOF焦点210を有する第2のすなわち2次のイオンビーム225を発生することになる。次に、第2のすなわち2次のイオンビーム225は、上記で論じたように及び図27Aに示すように、第2の静電ミラープリズム150F2に提供され、第2の静電ミラープリズム150F2は、第2の静電ミラープリズム150F2がオンであり、その電極がイオンを偏向させるために静電バイアスされているときに、イオン検出器120が位置決めされる第3のすなわち3次のTOF焦点面215を有する第3のすなわち3次のイオンビーム230を発生することになる。「サーベイモード(survey mode)」とも呼ばれ得るこの動作モードにおいて、静電ミラープリズム配置430は、中程度の分解能でかつイオン質量の検出範囲に対する制限なしのTOF−MS測定のために使用され得る。
さらに、この代表的な静電ミラープリズム配置430について、更なる第1及び第2のリフレクトロン420、425は、2つの静電ミラープリズム150Fに関して直線的に、すなわち、第1及び第2のリフレクトロン420、425について、同様に結合式出力−入力焦点である同じ中間TOF焦点210を有する第2のすなわち2次のイオンビーム225と一直線に配置される。したがって、第2の動作モードについて、第1の静電ミラープリズム150F1は、同様に、第1のすなわち初期のTOF焦点205を有する第1のすなわち1次の(到来)イオンビーム220を受信することになり、そして、第1の静電ミラープリズム150F1がオンであり、その電極がイオンを偏向させるために静電バイアスされているときに、第2のすなわち2次のTOF焦点210を有する第2のすなわち2次のイオンビーム225を発生することになる。これは、第1のすなわち1次の(到来)イオンビーム220が、この第2の動作モードのための第2のすなわち2次のイオンビーム225を生成するために「注入(inject)」され使用されることを可能にする。同様にこの第2の動作モードについて、第2の静電ミラープリズム150F2は、このときにオフされる。結果として、第2の静電ミラープリズム150F2は、電界を発生しておらず(すなわち、オンでなく、その電極がイオンを偏向させるために静電バイアスされていない)、また、イオン透過性になっているため、第2のすなわち2次のイオンビーム225は、図27Bに示すように、第2の静電ミラープリズム150F2を通って第2のリフレクトロン425内に(実質的に乱されずに)通過することになる。第1の静電ミラープリズム150F1のプリズマティック機能によって、これらのイオンが、上記で論じたように、エネルギー分散平面内で分離されて、異なるエネルギーを有するイオンの平行ビームになることが留意されるべきである。これらのイオンは、その減速電界に直交して第2のリフレクトロン425に入るため、イオンがそこからやって来る同じ方向に戻るように反射される。第2の静電ミラープリズム150F2がオフであるため、イオンは、影響を受けることなく、第2の静電ミラープリズム150F2を通って真っ直ぐ飛行し、第2のすなわち2次の(中間)TOF焦点210に達する。
その後、この第2の動作モードにおいて、第2のリフレクトロン425がオンであり、その電極がイオンを偏向させるために静電バイアスされているときで、かつ、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2が電界を発生していない(すなわち、両方がオフであり、それらの電極がイオンを偏向させるために静電バイアスされていない)とき、第2のすなわち2次のイオンビーム225は、図27Cに示すように、第2のリフレクトロン425によって反射され、第2の静電ミラープリズム150F2及び第1の静電ミラープリズム150F1の両方を通って第1のリフレクトロン420まで(実質的に乱されずに)通過する。第1のリフレクトロン420が同様にオンであり、その電極がイオンを偏向させるために静電バイアスされているときで、かつ、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2が、オフであり続け、電界を発生しておらず(すなわち、両方がオフであり、それらの電極がイオンを偏向させるために静電バイアスされておらず)、したがって、イオン透過性状態に留まるとき、第2のすなわち2次のイオンビーム225は、同様に図27Cに示すように、第1のリフレクトロン420によって戻るように反射され、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2の両方を通って第2のリフレクトロン425まで(実質的に乱されずに)通過する。この第2の動作モードにおいて、第1のリフレクトロン420及び第2のリフレクトロン425の両方がオンであり、電界を発生する状態で、かつ、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2の両方が、オフであり続け、電界を発生しない状態で、第2のすなわち2次のイオンビーム225は、以下で述べるように、プロセッサ130によって及び/又はコンピューティングデバイス132によって制御される吐出まで、第1のリフレクトロン420と第2のリフレクトロン425との間で、シャトル型運動で前後に反射され続けることになる。
高質量分解能で検査される関心の質量範囲の最も軽いイオンが、第2のリフレクトロン425から戻る途中で第2のすなわち2次のTOF焦点210を通過するときに、第1の静電ミラープリズム150F1の電極上の電位はオフされる(グラウンド電位になる)。これらのイオンは、その後、第1の静電ミラープリズム150F1を通って真っ直ぐに飛行し、(同様に、その減速電界に直交して)第1のリフレクトロン420に入って、結合式出力−入力焦点としての、第2のすなわち2次のTOF焦点210に向かって真っすぐに戻るように反射される。この場合、第1のリフレクトロン420と第2のリフレクトロン425との間の連続かつ交互の前後の反射のプロセス(シャトル運動)は、第2の静電ミラープリズム150F2が再びオンにスイッチングされるまで継続することができる。このスイッチングは、高質量分解能で検査される関心の質量範囲の最も軽いイオンが、第1のリフレクトロン420から戻る途中で第2のすなわち2次のTOF焦点210を通過するときに行われる。各反射において、イオンは第2のすなわち2次のTOF焦点210を通過し、その「ΔT」は、「T」(総飛行時間)が増加し続ける間に小さくなり、場合によっては、100000を超える質量分解能を提供する。
この代表的な静電ミラープリズム配置430において、したがって、第2の動作モードにおいて、飛行時間「T」は、ユーザーの選好又は選択に基づいて変更及び制御することができ、一方、最大の半分における質量スペクトルの幅「ΔT」は、(複数のTOF収束事象によって)小さく維持され、第1のリフレクトロン420と第2のリフレクトロン425との間の前後の反射は、反射イオンが、一般にプロセッサ130及び/又はコンピューティングデバイス132によって制御されるように、図27Dに示すように、第3のすなわち3次のイオンビーム230内で「吐出される(ejected)」状態で終了するまで継続する。ユーザー選択済み飛行時間「T」が、プロセッサ130及び/又はコンピューティングデバイス132の制御下で経過すると、第2のすなわち2次のイオンビーム225が、第1のリフレクトロン420からの反射に続いて第2の静電ミラープリズム150F2に提供されるため、第2の静電ミラープリズム150F2を通過する代わりに、第2の静電ミラープリズム150F2はオンされ、その電極は、イオンを偏向させるために静電バイアスされ、それが、上記で論じたように及び図27Dに示すように、第3のすなわち3次のTOF焦点面215を有する第3のすなわち3次のイオンビーム230を発生させ、同時に、異なるエネルギーを有する側方に分散したイオンビームを再結合して、第3のすなわち3次のTOF焦点面215に位置決めされるイオン検出器120が検出するための単一イオンビームにする(すなわち、色収差を打ち消す)。
第1及び第2のリフレクトロン420、425の寸法並びに前後反射の数は、この代表的な静電ミラープリズム配置430において、関心の質量範囲の幅を規定することになる。第1及び第2のリフレクトロン420、425用の入力イオンパッケージは、第1のすなわち初期のTOF焦点205(最も重い質量)と第2のすなわち2次のTOF焦点210(最も軽い質量)との間の最初の反射の前に位置する質量によって形成されることになる。このイオンパッケージは、反射の数が増加すると幅広化する。出力イオンパッケージは、第2のすなわち2次のTOF焦点210(最も軽い質量)と第1のリフレクトロン420の後板(最も重い質量)との間の最後の反射の後に位置する質量によって形成されることになる。そのため、第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2がオン及びオフされる瞬間を選択することは、超高質量分解能で検査される関心の質量範囲を決定又は規定することになる。
代表的な静電ミラープリズム配置430の1つの顕著な特徴は、静電ミラープリズム150F1、150F2及びリフレクトロン420、425が同じTOF焦点210を共有するため、イオンが、第1及び第2のリフレクトロン420、425の間に位置する第1の静電ミラープリズム150F1及び第2の静電ミラープリズム150F2を介して第1及び第2のリフレクトロン420、425の対の内部に注入され、内部から吐出され、一方、シャトル型複数反射イオン運動を有する同軸リフレクトロン対を述べる従来技術において、イオンの注入が、リフレクトロンの一方の後電極を通して行われることである。別の顕著な特徴は、第1及び第2のリフレクトロン420、425の間で前後に移動する第2のすなわち2次のイオンビーム225が、第1の静電ミラープリズム150F1のプリズマティック特性に起因して、異なる運動エネルギーを有するイオンの平行ビームになるよう空間分散することである。これは、第2のすなわち2次のTOF焦点210にエネルギー制御スリット255を有するエネルギーバンドパスフィルター140の設置を更に可能にするため、望ましくないエネルギーを有するイオンを、複数回、カットオフして、TOF質量スペクトルピークの「尾部」を抑制し、低エネルギーフラグメントイオンをフィルタリング除去することができる。イオンがそのシャトル運動中に多数回そこを通過する単一TOF焦点210にバンドパスエネルギーフィルタリングを実装することが、意図されるパスバンドの外のエネルギーの減衰を有意に改善することになり、それが、「尾部」が劇的に抑制された質量スペクトルピークの形状の改善をもたらし、したがって、静電ミラープリズム配置430の有効質量分解能を更に改善することになることに留意することが重要である。
そのため、代表的な静電ミラープリズム配置430を有するTOF質量分析器110及びシステム200の実施形態は、新規でかつ非自明の特徴であるバンドパスエネルギーフィルタリングを有するエネルギー等時性マルチパスTOF MSを備える。
さらに、この代表的な静電ミラープリズム配置430について、大きな直径を有する同軸円筒リフレクトロンを使用することに加えて又はそれに対して代替的に、楕円又は長方形断面を有する第1及び第2のリフレクトロン420、425を利用して、第2のすなわち2次のイオンビーム225等の、空間分散済みのシート状のイオンビームをよりよく収容することができる。
図28A、図28B、図28C、及び図28D(総称して「図28」と呼ぶ)は、第1の静電ミラープリズム1501、第2の静電ミラープリズム1502、第3の静電ミラープリズム150F3、第4の静電ミラープリズム150D4、第5の静電ミラープリズム150D5、及び第6の静電ミラープリズム150F6を利用する、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、第4のカスケード式配置又は構成で代表的な静電ミラープリズム150、150D、及び150Fを有する代表的な第9の静電ミラープリズム配置450を示す等角図である。静電ミラープリズム150Eを、同様に、静電ミラープリズム150Fに代わり、この代表的な静電ミラープリズム配置450のために等価的に利用することができる。その理由は、静電ミラープリズム150E及び150Fがともに、上記で述べたように、図19及び図20に示すイオン透過性後電極設計、並びに、格子又は開口315を有する固体板を実装することによってその後電極がイオン透過性になるよう修正される場合の、150C及び150D等の格子なし静電ミラープリズムの実施形態を特徴とするからである。上述したように、静電ミラープリズム150Fが第3の後電極155Fの格子付き構成を有し(すなわち、イオン透過性であり)、格子付き構成によって、静電ミラープリズム150Fがオフでありその電極がイオンを偏向させるために静電バイアスされていないときに、イオンビームが、有意の乱れなしで静電ミラープリズム150Fを通過することが同様に可能になる限りにおいて、静電ミラープリズム150Fは静電ミラープリズム150と異なる。この実施形態について、静電ミラープリズム150F3及び150F6のオン状態及びオフ状態は、プロセッサ130によって及び/又はより一般的にコンピューティングデバイス132によって制御し、それにより、これらのデバイスによる電界の発生、また相応して、任意の減速電界が発生されるかどうかを同様に制御することができる。この実施形態について、第1の静電ミラープリズム1501、第2の静電ミラープリズム1502、第4の静電ミラープリズム150D4、及び第5の静電ミラープリズム150D5の状態が常にオンであるものとすることができることが同様に留意されるべきである。
この代表的な静電ミラープリズム配置450を有する代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態は、幾つかの異なる動作モードを有する。異なる動作モードとは、第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502だけを利用する第1の動作モード、及び、第3の静電ミラープリズム150F3、第4の静電ミラープリズム150D4、第5の静電ミラープリズム150D5、及び第6の静電ミラープリズム150F6の4つ全てを使用し、その後同様に、イオン注入のために、第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502の両方を使用する第2の「リング」動作モードである。他の型の静電ミラープリズム150が、図28に示すこれらの種々の静電ミラープリズム150に等価的に代わることができることが同様に留意されるべきである。ただし、静電ミラープリズムが全て、格子付き設計及び格子なし設計であり得るが、静電ミラープリズム150Fが、上記で論じたイオン透過性後電極の実装を必要とすることに注意を要する。これらの種々の動作モードについて、第3の静電ミラープリズム150F3及び第6の静電ミラープリズム150F6は、プロセッサ130の制御下にある遠隔制御式スイッチングシステム(別個に示さず)を一般に通してオン及びオフされる。
代表的な静電ミラープリズム配置450は、(1)上記で論じた代表的な静電ミラープリズム配置145のため等で、90度の角度オフセットを有する、2つの静電ミラープリズム150、すなわち、第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502の第1の対、(2)上記で論じた代表的な静電ミラープリズム配置145のため等で、同様に90度の角度オフセットを有する、2つの静電ミラープリズム150、すなわち、第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4の第2の対、及び、(3)上記で論じた代表的な静電ミラープリズム配置145のため等で、同様に90度の角度オフセットを有する、2つの静電ミラープリズム150、すなわち、第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6の第3の対を備える。(1)第1の静電ミラープリズム1501及び第3の静電ミラープリズム150F3が同じ1次入力TOF焦点460を有し、(2)TOF焦点406が同様に、第6の静電ミラープリズム150F6の結合式出力−入力TOF焦点であり、(3)結合式出力−入力TOF焦点480が、静電ミラープリズムの第2の対及び第3の対にインターフェースする(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4が第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6にインターフェースする)ことに留意することが重要である。
したがって、第1の動作モードについて、第3の静電ミラープリズム150F3及び第6の静電ミラープリズム150F6はオフであるため、第1の静電ミラープリズム1501は、第6の静電ミラープリズム150F6及び第3の静電ミラープリズム150F3を通過する、第1のすなわち初期のTOF焦点460を有する第1のすなわち1次の(到来)イオンビーム510を受信することになる。第1の静電ミラープリズム1501はオンであり、その電極はイオンを偏向させるために静電バイアスされているため、第1の静電ミラープリズム1501は、中間TOF焦点525を有する中間イオンビーム515(上記で述べたように、その運動エネルギーに従った空間分散済みのイオンを有する)を発生することになる。次に、図3及び図4について上記で論じたように及び図28Aに示すように、中間イオンビーム515は、第2の静電ミラープリズム1502に提供され、第2の静電ミラープリズム1502は、第2の静電ミラープリズム1502が同様にオンであり、その電極がイオンを偏向させるために静電バイアスされているため、イオン検出器120が位置決めされる出力TOF焦点面530を有する出力イオンビーム520を発生することになる。「サーベイモード」とも呼ぶことができるこの動作モードにおいて、配置450静電ミラープリズム配置450は、中程度の分解能でかつイオン質量の検出範囲に対する制限なしのTOF−MS測定のために使用することができる。
さらに、この代表的な静電ミラープリズム配置450について、第4の静電ミラープリズム150D4及び第5の静電ミラープリズム150D5は、第3の静電ミラープリズム150F3及び第6の静電ミラープリズム150F6とともに正方形又は長方形リング構造を形成するために配置される。したがって、第2の「リング」動作モードについて、第6の静電ミラープリズム150F6は同様に、入力TOF焦点460を有する第1のすなわち1次の(到来)イオンビーム510を受信することになり、第6の静電ミラープリズム150F6がオフであるとき、第1のすなわち1次の(到来)イオンビーム510は、第6の静電ミラープリズム150F6を通過して、第3の静電ミラープリズム150F3に至ることになる。第3の静電ミラープリズム150F3は、ここでオンであり、その電極は、イオンを偏向するために静電バイアスされているため、第3の静電ミラープリズム150F3は、上述した空間分散済みの運動エネルギーを有し、第4の(中間)TOF焦点470を有する第4のイオンビーム465を発生することになる。これは、第1のすなわち1次の(到来)イオンビーム510が、図28Bに示すように、この第2の動作モード用の一連のイオンビームを生成するために「注入」され使用されることを可能にする。同様に、この第2の動作モードについて、第4の静電ミラープリズム150D4及び第5の静電ミラープリズム150D5は同様に、このときオンである(いずれかが、このモードについてオンされる、又は、常にオンである)。上記で論じたように、第3の静電ミラープリズム150F3のプリズマティック機能に起因して、これらのイオンが、エネルギー分散平面内で分離されて、異なるエネルギーを有する第4のイオンビーム465内のイオンの平行ビームになることが留意されるべきである。
図28Bに示すように、第4のイオンビーム465は、第4の静電ミラープリズム150D4に提供され、第4の静電ミラープリズム150D4は、同様に第5の静電ミラープリズム150D5用の入力TOF焦点である第5の出力TOF焦点480を有する第5の収束性イオンビーム475を発生し、第5の静電ミラープリズム150D5は、上述した空間分散済みの運動エネルギーを有し、同様に第6の静電ミラープリズム150F6用の入力TOF焦点である第6の(中間)TOF焦点490を有する第6のイオンビーム485を発生する。その後、この第2の動作モードにおいて、第6の静電ミラープリズム150F6がここでオンされ、その電極がイオンを偏向するために静電バイアスされている状態で、図28Cに示すように、第6のイオンビーム485は、第6の静電ミラープリズム150F6によって反射され、同様に第3の静電ミラープリズム150F3への(また同様に、第1の静電ミラープリズム1501への)入力TOF焦点である結合式出力−入力TOF焦点460を有する第7の収束性イオンビーム455を発生する。この第2の動作モードにおいて、第3の静電ミラープリズム150F3、第4の静電ミラープリズム150D4、第5の静電ミラープリズム150D5、及び第6の静電ミラープリズム150F6の4つ全てがオンであり、電界を発生する状態で、イオンビーム455、465、475、及び485は、プロセッサ130によって及び/又はコンピューティングデバイス132によって制御されるように、静電ミラープリズム150のこの正方形又は長方形リングに沿って発生され続けることになる。
この高質量分解能動作モードを可能にするため、第3の静電ミラープリズム150F3の電極上の電位は、検査される関心の質量範囲の最も軽いイオンが、入力TOF焦点460を通過するときより遅くならずにオンされ、第6の静電ミラープリズム150F6の電極上の電位は、高質量分解能で検査される関心の質量範囲の最も軽いイオンが、第6の(中間)TOF焦点490を最初に通過するときより遅くならずにオンされる。この場合、静電ミラープリズム150の正方形又は長方形リングの周りの連続反射のプロセスは、イオンを静電ミラープリズム1501及び1502の対に渡すため、第3の静電ミラープリズム150F3が再びオフにスイッチングされるまで継続する可能性があり、静電ミラープリズム1501及び1502は、イオンを、入力TOF焦点460から出力TOF焦点530に搬送する。このスイッチングは、高質量分解能で検査される関心の質量範囲の最も軽いイオンが、入力TOF焦点460を通過するときに行われる。各反射において、イオンはTOF焦点460、470、480、及び490を通過し、その「ΔT」は、「T」(総飛行時間)が増加し続ける間に小さくなり、同様に、場合によっては、100000を超える質量分解能を提供する。
この代表的な静電ミラープリズム配置450において、したがって、第2の動作モードにおいて、飛行時間「T」は、ユーザーの選好又は選択に基づいて変更及び制御される可能性があり、反射は、終了するまで、第3の静電ミラープリズム150F3、第4の静電ミラープリズム150D4、第5の静電ミラープリズム150D5、及び第6の静電ミラープリズム150F6の正方形又は長方形リングの周りで継続する。ユーザー選択済み飛行時間「T」が、プロセッサ130及び/又はコンピューティングデバイス132の制御下で経過すると、反射イオンは、その後、第3の静電ミラープリズム150F3がオフされると、「吐出」される。第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502がともに、オンに維持されている(又は、ターンオンされる)ため、上記で論じたように及び図28Dに示すように、収束性イオンビーム455は、第3の静電ミラープリズム150F3を通過し、第1の静電ミラープリズム1501によって反射されて、中間イオンビーム515を形成し、中間イオンビーム515は、次に、第2の静電ミラープリズム1502によって反射されて、出力イオンビーム520を提供し、出力イオンビーム520は、異なるエネルギーを有する側方に分散したイオンビームを再結合して、出力TOF焦点面530に位置決めされるイオン検出器120が検出するための単一イオンビームにする(すなわち、色収差を打ち消す)。第3の静電ミラープリズム150F3がオフにスイッチングされる瞬間は、検出することができる質量の範囲を決定する。
代表的なTOF質量分析器100、100A装置の実施形態及び代表的なTOFシステム200、200A装置の実施形態についてのこの代表的な静電ミラープリズム配置450は、静電ミラープリズム150だけに基づくバンドパスエネルギーフィルタリングを有するエネルギー等時性マルチパスTOF MSの別の例を提供する。イオンが、長方形リング幾何形状を通るその運動中に多数回そこを通過する2つのTOF焦点470及び490に、また最後に、イオンがイオン検出器120に至る途中で通過する中間TOF焦点525にバンドパスエネルギーフィルタリングを実装することが、意図されるパスバンドの外のエネルギーの減衰を有意に改善することになり、それが、「尾部」が劇的に抑制された質量スペクトルピークの形状の改善をもたらし、したがって、静電ミラープリズム配置450の有効質量分解能を更に改善することになることに留意することが重要である。さらに、静電ミラープリズム配置450は、重要なスケーリング特徴を有する、すなわち、静電ミラープリズム150の側方寸法を増加させることは、入力TOF焦点460と出力TOF焦点530との間のイオン飛行経路の延長をそれぞれもたらす。第1の実施形態において、第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502は、他の4つの静電ミラープリズム(第3の静電ミラープリズム150F3、第4の静電ミラープリズム150D4、第5の静電ミラープリズム150D5、及び第6の静電ミラープリズム150F6)より比較的大きく、単一イオンパス動作について高質量分解能を同様に達成する。
静電ミラープリズム配置450の動作を要約すると、1つの動作モードにおいて、電位は、第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502について常にオンであり、中程度の質量分解能での全体のTOF質量スペクトルの測定を可能にする。これらのミラーの前に、4つの比較的小さな静電ミラー(第3の静電ミラープリズム150F3、第4の静電ミラープリズム150D4、第5の静電ミラープリズム150D5、及び第6の静電ミラープリズム150F6)が、正方形又は長方形幾何形状を有する別のTOF MSシステムセクションを形成するために位置決めされ、それにより、
(1)6つ全ての静電ミラープリズムのエネルギー分散平面が一致する。
(2)第1の大きなミラー対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)の入力TOF焦点460が、第2の小さなミラー対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の入力TOF焦点460と一致し、それにより、入力TOF焦点460が、第1の大きな対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)の相対的サイズを決定する比例的アップスケーリング用のスケーリング参照点である。
(3)静電ミラープリズム150の第3の(小さな)対(第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6)が、第1の大きな対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)及び第2の小さな対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の入力TOF焦点460、並びに、第1の(大きな)対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)及び第2の(小さな)対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の、それぞれ出力TOF焦点530、480を接続する対称ライン495にわたって、静電ミラープリズム150の第2の小さな対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の対称又はミラー反射である。
(4)第1の対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)の出力TOF焦点530が同様に、静電ミラープリズム配置450を有する全体のTOF−MSシステム200の(また、イオン検出器120が位置する)主焦点である。
(5)第2の(小さな)対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の出力TOF焦点480が同様に、第3の(小さな)対(第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6)の結合式入力TOF焦点であり、したがって、2つの対のRAIMPカスケードを形成する。
(6)重要なことには、第3の(小さな)対(第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6)のエネルギー分散平面が、第2の(小さな)対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)のエネルギー分散平面に一致し、その理由が、第3の(小さな)対(第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6)の出力TOF焦点460が第2の(小さな)対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の入力TOF焦点に一致するようにそれがひっくり返された(180度だけ回転された)からであり、また、このエネルギー分散平面が同様に、第1の大きな対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)のエネルギー分散平面に一致する。
(7)対称又はミラーライン495の両側に対称に位置する、リング配置についての2つの中間TOF焦点470、490が存在し、また、エネルギーバンドパスフィルター140(それぞれが可変幅制御スリット255を有する)が、これらの中間TOF焦点470、490に位置決め又は配置されて、静電ミラープリズム配置300、400、415、及び430について上記で論じたように、システム200の実施形態のこの部分の信号対雑音比及び有効質量分解能を改善することができる。そして、
(8)エネルギーバンドパスフィルター140(可変幅制御スリット255を有する)が、中間TOF焦点525に位置決め又は配置されて、第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502を有するシステム200の実施形態のこの部分の信号対雑音比及び有効質量分解能を改善することができる。
この代表的な静電ミラープリズム配置450を有するこの代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態を使用して測定することができる質量範囲は、第2の対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)及び第3の対(第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6)を通るターン数に依存することになる。マルチターン分析用の入力イオンパッケージは、第2の対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)用の入力TOF焦点460(最も重い質量)と第3の対(第5の静電ミラープリズム150D5及び第6の静電ミラープリズム150F6)の中間TOF焦点490(最も軽い質量)との間の第1のターンの前に位置する質量によって形成されることになる。マルチターンTOF−MS分析用の出力イオンパッケージは、第2の対(第3の静電ミラープリズム150F3及び第4の静電ミラープリズム150D4)の入力TOF焦点460(最も軽い質量)と中間TOF焦点470(最も重い質量)との間の最後のターンの後に位置する質量によって形成されることになる。そのため、第3の静電ミラープリズム150F3及び第6の静電ミラープリズム150F6がターンオン及びターンオフされる瞬間を選択することは、超高質量分解能で検査される関心の質量範囲を決定することになる。第1の大きな対(第1の静電ミラープリズム1501及び第2の静電ミラープリズム1502)だけを使用する第1の(サーベイTOF−MS)動作モードについて、イオン検出スキーム、データ取得ハードウェア、及び/又はデータ記憶能力によって課される制限を除いて、質量範囲が制限を持たないことが留意されるべきである。
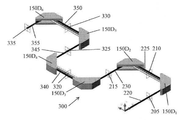
図29は、代表的なTOF質量分析器100装置の実施形態及び代表的なTOFシステム200の実施形態について、第5のカスケード式でかつタンデムの配置又は構成を有する複数の代表的な静電ミラープリズム150Dを有する第10の代表的な静電ミラープリズム配置500を示す等角図であり、また、上記で論じた代表的な第5の静電ミラープリズム配置300の変形である。第10の代表的な静電ミラープリズム配置500について、例として、限定することなく示す静電ミラープリズム150Dを有する4つの静電ミラープリズム150は、例として、限定することなく、レーザービーム発生器(すなわち、レーザー)又は電子ビーム発生器等の解離デバイス505とともに利用されて、選択済みの関心の質量の光解離又は電子衝突解離を引き起こす。
上述したように、静電ミラープリズム150は、2つの静電ミラープリズム150の群で対毎に配置される。図29に示すように、4つの静電ミラープリズム150Dが、カスケード接続されており、すなわち、直列に配置されており、第1の静電ミラープリズム150D1は第1の対として第2の静電ミラープリズム150D2と対形成され、第3の静電ミラープリズム150D3は第2の対として第4の静電ミラープリズム150D4と対形成される。静電ミラープリズム150の1つの対の出力TOF焦点は、静電ミラープリズム150の次の対の入力TOF焦点になる。示すように、5つのTOF焦点205、210、215、320、及び325、並びに、5つのイオンビーム220、225、230、340、及び345が存在する。
この第10の代表的な静電ミラープリズム配置500は同様に、格子なし静電ミラープリズム150Dの2つの対を使用する複数反射(カスケード)静電ミラープリズム150TOF−MS設計の例であるが、上記で論じた任意の型の静電ミラープリズム150(格子付き又は格子なし)を、等価的に利用することができる。静電ミラープリズム150の2つの対が、同じ「エネルギー分散平面」内に存在し、上述した5つのTOF焦点が存在する。5つのTOF焦点とは、(パルス化イオン源105又は介在する構成要素からの)入力焦点205、異なるエネルギーの空間分散されるイオン用の2つの「中間」焦点210、320、静電ミラープリズム150の第1及び第2の対又はセットの間でインターフェースするための1つの結合式出力−入力焦点215、及びイオン検出器120を設置することができる最後の出力焦点325である。
示すように、静電ミラープリズム150Dの第1の対について、第1のすなわち1次のイオンビーム220(第1のすなわち初期のTOF焦点205を有する)は、第1の静電ミラープリズム150D1に入力され、第1の静電ミラープリズム150D1は、第2のすなわち2次のイオンビーム225(その運動エネルギーに従う空間分散済みイオンを有し、第2のすなわち2次の(中間)TOF焦点210を有する)を、第2の静電ミラープリズム150D2に対して発生し、第2の静電ミラープリズム150D2は、収束性の又は再結合済みの第3のすなわち3次のイオンビーム230(結合式出力−入力焦点として、第3のすなわち3次のTOF焦点面215を有する)を発生する。静電ミラープリズム150Dの第2の対について、第3のすなわち3次のイオンビーム230は、第3の静電ミラープリズム150D3に入力され、第3の静電ミラープリズム150D3は、第4の静電ミラープリズム150D4に提供される次の中間イオンビーム340(その運動エネルギーに従う空間分散済みイオンを有し、中間TOF焦点320を有する)を発生し、第4の静電ミラープリズム150D4は、別の収束性の又は再結合済みの出力イオンビーム345(出力TOF焦点面325を有する)を発生する。上述したように、イオン検出器120は、通常、この出力TOF焦点面325に位置決めされ、代表的な静電ミラープリズム配置500とともに、別の代表的なTOF質量分析器100装置の実施形態を形成する。さらに、任意のバンドパスエネルギーフィルタリングは、異なるエネルギーの空間分散済みイオンについて、2つの中間焦点210及び320の任意の中間焦点に上述したように実装することができ、第1及び第2のバンドパスフィルター140A及び140Bをそれぞれ使用して示される。
マルチ「跳ね返り」の代表的な静電ミラープリズム配置500は、タンデムモードとも呼ばれるMS−MSモードで動作する能力を有する。そのため、エネルギーバンドパス制御スリット255を有する第1のエネルギーバンドパスフィルター140Aは第1の中間TOF焦点210に位置決め又は配置されるべきであり、第2のエネルギーバンドパスフィルター140Bは次の中間TOF焦点320に位置決め又は配置されるべきである。中間TOF焦点210におけるエネルギーバンドパスフィルター140Aは、フラグメントイオンが、その場所を超えて貫入しないことを保証する。こうして形成される(又は、フィルタリングされる)イオンのフラグメントなし質量スペクトルは、第3のすなわち3次のTOF焦点215を通過するとき、異なるm/zを有するイオンは、所定の空間内に十分に閉じ込められるが、経時的に広がることができる。この場合、識別することができる分子イオン(本明細書で「前駆体」と呼ぶ)に対応するMSピークの群は、解離デバイス505によって発生された十分に収束したパルス化レーザービームによって又は電子ビームによって、選択された瞬間にインターセプトされて、分子フラグメント化(光解離又は電子衝突解離による)をトリガーし、フラグメントイオンを生成することができる。
これらのフラグメントイオンの運動エネルギーは、前駆体の運動エネルギーより小さく、フラグメント質量と前駆体質量との比に比例する前駆体エネルギーの何分の1かである。中間TOF焦点320にエネルギーバンドパスフィルターがないとき、空間内で分散したフラグメントイオンは、第4の静電ミラープリズム150D4を通過し、固有の飛行時間でイオン検出器120(出力TOF焦点325に位置決めされる)に達することができる。質量スペクトルにおいて、これは、前駆体ピークの消失又は減衰及び異なる時間における新しいピークの出現とみなすことができる。エネルギーバンドパスフィルター140Bは、TOF焦点320に設置される場合、フラグメントイオンだけがミラープリズム150D4を通過し、イオン検出器120に達するように、必要である場合、整列されてもよい。いずれの場合も、これらの新しいピークについて、フラグメントの間で分割される運動エネルギーの割合は、代表的な静電ミラープリズム配置500の幾何形状の知識に基づいて計算することができる。エネルギーバンドパスフィルター140BをTOF焦点320に実装していることは、MS−MS動作をよりよく較正し、フラグメント識別を改善するのを助けることができる。これは、前駆体イオン及びそのフラグメント化チャネルの明確な識別を可能にすることになる。さらに、MS−MS動作モードは、TOF−MSデューティサイクルの半分として実行され得るため、フラグメントイオンは、2つのイオンパルスの中の1つのイオンパルスについてだけ形成することができ、それぞれの半分は、別個の時間−デジタル変換器又はデジタイザーによって取得することができる。この場合、MS−MS分析は、通常のTOF−MS分析によってリアルタイムにかつほぼ同時に行うことができる。これは、イオンパルスの50%が非フラグメント化前駆体を有する通常の質量スペクトルを生成することができ、他の50%がフラグメント化を受ける前駆体を有する質量スペクトルを生成することができることを意味する。これは、前駆体及びフラグメントが同じ分析体積に由来することを保証することによってMS分析の精度を改善することになる。
MS−MSモードでの飛行時間質量分析法は、並列に動作する代表的な静電ミラープリズム配置500の2つのセットを使用して実施することができ、それぞれは、パルス化イオン源105から発生された到来イオンビーム220を有するが、フラグメント化は、2つの並列の代表的な静電ミラープリズム配置500の一方だけで起こる。この状況において、代表的な静電ミラープリズム配置500の幾何形状及びイオンの名目運動エネルギーの知識は、その飛行時間から、検出されるフラグメントイオンの運動エネルギーを決定することを可能にする。さらに、検出されるフラグメントイオンの運動エネルギーの知識は、フラグメント化チャネルの決定、したがって、分子前駆体イオンの識別を可能にする。交互方式でトリガーされる(それにより、パルス化レーザー又は電子ビームは、2つのトリガーパルスの中の1つのトリガーパルスだけで発火され、パルス化イオン源は全てのパルスでトリガーされる)2つの時間−デジタル変換器又はデジタイザーによってTOF−MS検出を実施することは、直接比較され得るフラグメントなしのTOF−MSスペクトル及びフラグメントを含むTOF−MSスペクトルの準並列測定が、前駆体及びフラグメントイオンが同じ分析体積に由来することを保証することを可能にする。
代表的な実施形態の多数の利点はすぐに明らかになる。複数の代表的な静電ミラープリズム配置を使用するTOF−MS装置100、100A、及びシステム200、200Aの複数の実施形態が開示されており、複数の実施形態は、イオンビームを構成するイオンの運動エネルギーを選択及び/又は制御して、選択可能かつ比較的狭いバンドの運動エネルギーを有するイオンビームを生成することができる。また、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、種々のシステムの実施形態において、選択可能な又は構成可能な飛行時間を提供し、複数のTOF焦点及びタンデム動作を含むことができる。また、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、無収差イメージングを可能にするために、検出時に空間情報を選択的に保存する。さらに、TOF−MS装置100、100A及びシステム200、200Aのこうした実施形態は、これらの種々の特徴についてまた種々の組合せで、TOF−MS装置100、100A及びシステム200、200Aの実施形態を選択的に動作させる又は構成するために、マルチモード動作が可能である。
上述したように、パルス化イオン源105は、任意選択で、任意のイオン光学系、イオンガイド、又はイオン加速器を含むことができ、第1のすなわち1次のイオンビーム220をTOF質量分析器100、100Aに提供する。イオン光学系は、通常、イオンガイド(複数の場合もある)110とTOF質量分析器100、100Aへの入口との間で所望の軸方向長さの真空排気済み体積(例えば、実質的に中性気相分子がなくて、本質的に衝突なしである)内に配置される。イオン光学系(例えば、軸の周りに配置されたイオンレンズ)は、例えば、軸と同軸の円筒電極、軸上アパーチャを有する板、又は、軸上ギャップによって分離された板若しくは半円筒の対とすることができる。DC電位を、イオンレンズのうちの1つ以上に印加することができる。イオンレンズのうちの1つ以上は、イオンビームの幾何形状が、TOF質量分析器100、100Aへの入口の受容エリアに適合することを保証するイオンスライサーとして構成することができる。また、連続イオンビームが発生される場合、こうしたイオン光学系は、連続イオンビームをパルス化(又はパケットベース)イオンビーム220に変換することが可能となる。
1つ以上のオプションのイオンガイドは、一般に、イオン光学系が真空で動作する状態で、時として高い圧力で、種々の連続ビームイオン源にインターフェースするために利用することができ、軸に沿ってイオンが透過されることを可能にしながら、軸に沿ってイオンを閉じ込めるために構成される電極の配置を含むことができる。イオンガイドの型に応じて、無線周波数(RF)及び/又は直流(DC)電圧を、イオンガイド電極に印加することができる。イオンガイドは、例えば、収束性幾何形状を有することができ、収束性幾何形状は、次のデバイス内への透過を改善するため、イオンビームを圧縮する。例として、イオンガイドは、例えば、限定することなく、電極が全体的にイオン移動方向に沿って伸張した状態で多極構造として構成することができ、又は代替的に、リング状電極又はアパーチャを含む板電極がイオン移動方向に垂直に配向した状態で、円筒積重ね式リング構造又はイオンファンネルとして構成することができ、又は、平面幾何形状を有することができる。
本明細書で使用するとき、「プロセッサ」(又は「コントローラー」)130は、任意のタイプのプロセッサ又はコントローラーであってもよく、また、本明細書で論じる機能を実施するように構成されるか、設計されるか、プログラムされるか、又はその他の方法で適合される1つ以上のプロセッサ(又は複数の場合もある)130として具現化されてもよい。プロセッサ又はコントローラーという用語が本明細書で使用されるとき、プロセッサ130は、単一集積回路(「IC」)の使用を含んでもよい、又は、コントローラー、マイクロプロセッサ、デジタル信号プロセッサ(「DSP」)、アレイプロセッサ、グラフィクス又は画像プロセッサ、並列プロセッサ、マルチコアプロセッサ、カスタムIC、特定用途向け集積回路(「ASIC」)、フィールドプログラマブルゲートアレイ(「FPGA」)、適応型コンピューティングIC、関連するメモリ(RAM、DRAM、及びROM等)、並びに他のIC及び構成要素(アナログであれ、デジタルであれ)等の、複数の集積回路又はともに接続されるか、配置されるか、又はグループ化された他の構成要素の使用を含んでもよい。結果として、本明細書で使用するとき、プロセッサ又はコントローラーという用語は、マイクロプロセッサメモリ又は更なるRAM、DRAM、SDRAM、SRAM、MRAM、ROM、FLASH、EPROM、又はE2PROM等の関連するメモリとともに、単一IC、又は、本明細書で論じる機能を実施するカスタムIC、ASIC、プロセッサ、マイクロプロセッサ、コントローラー、FPGA、適応型コンピューティングIC、又は集積回路の何らかの他のグループ化の配置構成を同等に意味し含むと理解されるべきである。プロセッサ130は、関連するメモリとともに、TOF−MS装置100、100A及びシステム200、200Aの種々の実施形態を制御するため等で、本明細書で論じる本発明の方法を(プログラミング、FPGA相互接続、又は配線によって)実施するように適合又は構成することができる。例えば、方法は、プログラムされ、プロセッサ130が動作している(すなわち、パワーオンされ機能している)ときに後で実行するため、プログラム命令又は他のコード(又は同等の構成若しくは他のプログラム)のセットとして、その関連するメモリ(及び/又はメモリ125)及び他の同等の構成要素を有するプロセッサ130に格納されてもよい。同等に、プロセッサ130が、全体的に又は部分的に、FPGA、カスタムIC、及び/又はASICとして実装されてもよいとき、FPGA、カスタムIC、又はASICは、同様に、本発明の方法を実装するように設計、構成、及び/又は実配線されてもよい。例えば、プロセッサ130は、場合によってはメモリ125と連携して、を含んで、本発明の方法を実装するように、それぞれ、実配線、プログラム、設計、適合、又は構成される、「プロセッサ」又は「コントローラー」と総称的に呼ばれる、アナログ及び/又はデジタル回路、コントローラー、マイクロプロセッサ、DSP、及び/又はASICの配置構成として実装されてもよい。
データレポジトリ(又はデータベース)を含むことができるメモリ125は、現時点で既知であるか又は将来利用可能となる、任意のコンピューター又は他の機械可読データ記憶媒体、メモリデバイス、又は情報の格納若しくは通信用の他の記憶デバイス若しくは通信デバイスを含む、任意の数の形態で具体化することができる。これらの形態には、限定されないが、選択される実施形態に応じて、既知であるか又は既知となる、揮発性であるか又は不揮発性であるか、着脱可能であるか又は着脱不能であるかにかかわらず、限定ではなくRAM、FLASH、DRAM、SDRAM、SRAM、MRAM、FeRAM、ROM、EPROM若しくはE2PROMを含む、メモリ集積回路(「IC」)若しくは集積回路のメモリ部分(プロセッサ130、又はプロセッサIC内の常駐メモリ等)、又は、磁気ハードドライブ、光ドライブ、磁気ディスク若しくはテープドライブ、ハードディスクドライブ、フロッピーディスク、CDROM、CD−RW、デジタル多用途ディスク(DVD)若しくは他の光メモリ等の他の機械可読記憶機構若しくはメモリ媒体、又は他の任意のタイプのメモリ、記憶媒体、若しくはデータ記憶装置若しくは回路等の他の任意の形態のメモリデバイスが含まれる。メモリ125は、様々なルックアップテーブル、パラメーター、係数、他の情報及びデータ、(本発明のソフトウェアの)プログラム又は命令、及びデータベーステーブル等の他のタイプのテーブルを格納するように適合させることができる。
上述したように、プロセッサ130は、例えば本発明のソフトウェア及びデータ構造を用いて、本発明の方法を実行するように実配線又はプログラムされている。結果として、本発明のシステム及び関連する方法は、上述した非一時的コンピューター可読媒体内で具体化される命令及び/又はメタデータのセット等、こうしたプログラミング又は他の命令を提供するソフトウェアとして具体化することができる。さらに、メタデータを利用して、ルックアップテーブル又はデータベースの様々なデータ構造を定義することもできる。こうしたソフトウェアは、例として限定ではなく、ソースコード又はオブジェクトコードの形態とすることができる。ソースコードは、何らかの形態の命令又はオブジェクトコード(アセンブリ言語命令又はコンフィギュレーション情報を含む)に更にコンパイルすることができる。本発明のソフトウェア、ソースコード又はメタデータは、C、C++、Matlab、SystemC、LISA、XML、Java(登録商標)、Brew、SQL及びその変形形態(例えばSQL99又はSQLのプロプライエタリ版)、DB2、Oracle、又は様々なハードウェア定義言語若しくはハードウェアモデリング言語(例えばVerilog、VHDL、RTL)及び結果として得られるデータベースファイル(例えばGDSII)を含む、本明細書で説明した機能を実行する、他のあらゆるタイプのプログラミング言語の任意のタイプのコードとして具体化することができる。結果として、本明細書で等価に用いる「構造」、「プログラム構造」、「ソフトウェア構造」又は「ソフトウェア」は、あらゆるシンタックス又はシグネチャを有するあらゆる種類のあらゆるプログラム言語をも意味しかつ指し、それは、(例えば、インスタンス化されるか、又はプロセッサ130を含むプロセッサ又はコンピューターにロードされ実行されたとき)関連する機能又は指定された方法を提供するか、又は提供すると解釈することができる。
本発明のソフトウェア、メタデータ又は他のソースコード及びあらゆる結果として得られるビットファイル(オブジェクトコード、データベース又はルックアップテーブル)は、メモリ125に関して上述したようなコンピューター可読命令、データ構造、プログラムモジュール又は他のデータとして、コンピューター又は他の機械可読データ記憶媒体のいずれか等の任意の有形の非一時的記憶媒体、例えば、上述したようなフロッピーディスク、CDROM、CD−RW、DVD、磁気ハードドライブ、光ドライブ又は他のあらゆるタイプのデータ記憶装置若しくは媒体内で具体化することができる。
ネットワークインターフェース135は、関連するチャネル、ネットワーク、又はバスに対する適切な接続のために利用される。例えば、ネットワークインターフェース135は、ワイヤラインインターフェースのためにインピーダンス整合、ドライバー、及び他の機能を提供することができ、無線インターフェースのために復調及びアナログ−デジタル変換を提供することができ、コンピューティングデバイス132のため、及び/又は、プロセッサ130及び/又はメモリ125のため、他のデバイスとの物理インターフェースをそれぞれ提供することができる。一般に、ネットワークインターフェース135は、プログラム命令、パラメーター、構成情報、制御メッセージ、データ、及び他の関連情報等の選択される実施形態に応じてデータを受信及び送信するために使用される。
ネットワークインターフェース135は、当技術分野で知られているように又は知られるようになり得るように実装されて、プロセッサ130と、無線、光、又は有線等の任意のタイプのネットワーク又は外部デバイスとの間で、また、任意の適用可能な規格(例えば、例として限定することなく、種々のPCI、USB、RJ45、Ethernet(Fast Ethernet、Gigabit Ethernet、300ase−TX、300ase−FX等)、IEEE802.11、WCDMA(登録商標)、WiFi、GSM(登録商標)、GPRS、EDGE、3G、及び上記で述べた他の規格及びシステムのうちの1つ)を使用してデータ通信を提供してもよく、また、インピーダンス整合能力、高電圧制御バスとインターフェースするための低電圧プロセッサ用の電圧変換、有線又は無線送受信機、及び、プロセッサ130からのシグナリングに応答して種々のライン又はコネクタをターンオン又はオフする種々のスイッチング機構(例えば、トランジスタ)を含んでもよい。さらに、ネットワークインターフェース135は、同様に、例えば、ディスプレイ上に出力するためリアルタイムに情報を受信するため、実配線又はRF又は赤外シグナリングを通して等で信号を、コンピューティングデバイス132及び/又はシステム200に対して外部にそれぞれ受信及び/又は送信するように同様に構成及び/又は適合されてもよい。ネットワークインターフェース135は、選択される任意のアーキテクチャを使用して、任意のタイプのバス又はネットワーク構造又は媒体に対する接続を提供してもよい。例として限定することなく、こうしたアーキテクチャは、業界標準アーキテクチャ(ISA)バス、Enhanced ISA(EISA)バス、マイクロチャネルアーキテクチャ(MCA)バス、周辺コンポーネント相互接続(PCI)バス、SANバス、又は、Ethernet、ISDN、Tl、衛星、無線等のような任意の他の通信若しくはシグナリング媒体を含む。
本開示は、本発明の原理の例示として考えられ、示した特定の実施形態に本発明を限定することを意図されない。この点に関して、本発明が、その適用において、上記及び以下で述べられる、図面に示される、又は例において述べられる構成の詳細及び構成要素の配置構成に限定されないことが理解される。本発明と一貫性があるシステム、方法、及び装置は、他の実施形態が可能であり、種々の方法で実践され実施されることが可能である。
本発明について、その具体的な実施形態に関して記載したが、これらの実施形態は、単に例示的なものであり、本発明を限定するものではない。本明細書における記載では、本発明の実施形態が完全に理解されるように、電子部品、電子及び構造的接続、材料並びに構造的変形の例等、多数の具体的な詳細を提供している。しかしながら、当業者は、本発明の実施形態を、具体的な詳細のうちの1つ以上を伴わずに、又は他の装置、システム、アセンブリ、構成要素、材料、部品等とともに実施することができることを理解するであろう。他の場合では、既知の構造、材料又は動作は、本発明の実施形態の態様を不明瞭にしないように具体的に示さずかつ詳細に記載していない。さらに、様々な図は、正確な縮尺で描かれておらず、限定するものとみなされるべきではない。
本明細書を通して、「1つの実施形態」、「一実施形態」又は具体的な「実施形態」に対して言及する場合、それは、その実施形態に関連して記載される特定の特徴、構造又は特性が、本発明の少なくとも1つの実施形態に含まれ、必ずしも全ての実施形態に含まれるものではなく、さらに、必ずしも同じ実施形態を指すものではないことを意味する。さらに、本発明の任意の具体的な実施形態の特定の特徴、構造又は特性を、任意の適切な方法で、かつ他の特徴を対応して使用することなく選択された特徴を使用することを含む、1つ以上の他の実施形態との任意の適切な組合せで、組み合わせることができる。さらに、本発明の本質的な範囲及び趣旨に対して特定の応用、状況又は材料を採用するように、多くの変更を行うことができる。本明細書に記載し例示する本発明の実施形態の他の変形及び変更が、本明細書における教示に鑑みて可能であり、本発明の趣旨及び範囲の一部であるとみなされるべきであることが理解されるべきである。
本明細書の数値範囲の列挙について、同じ程度の精度を有するその間のそれぞれの介在する数値が明示的に企図される。例えば、6〜9の範囲について、数値7及び8が、6及び9に加えて企図され、6.0〜7.0の範囲について、数値6.0、6.1、6.2、6.3、6.4、6.5、6.6、6.7、6.8、6.9、及び7.0が明示的に企図される。さらに、所定の範囲内の全ての介在する部分範囲が、任意の組合せで企図され、また、本開示の範囲内にある。例えば、5〜10の範囲について、部分範囲5〜6、5〜7、5〜8、5〜9、6〜7、6〜8、6〜9、6〜10、7〜8、7〜9、7〜10、8〜9、8〜10、及び9〜10が企図され、また、本開示の範囲内にある。
図に示す要素のうちの1つ以上を、特定の用途に従って有用である可能性があるように、より別個に又は統合して実施することもでき、又はさらには、場合によっては除去するか若しくは動作不能とみなすこともできることも理解されよう。特に、別個の構成要素の分離又は組合せが不明瞭であるか又は識別できない実施形態の場合、構成要素の一体的に形成された組合せもまた、本発明の範囲内にある。さらに、本明細書における「結合された」という用語(「結合する」又は「結合可能な」等のその様々な形態も含む)を使用する場合、それは、一体的に形成された構成要素及び別の構成要素を介して又は通して結合される構成要素を含む、任意の直接的な若しくは間接的な電気的、構造的、若しくは磁気的結合、接続若しくは取付け、又はこうした直接的な若しくは間接的な電気的、構造的、若しくは磁気的結合、接続若しくは取付けに対する適応若しくは能力を意味しかつ含む。
さらに、図面/図におけるいかなる信号矢印も、具体的に別段の言及がない限り、限定するものではなく単に例示するものとみなされるべきである。ステップの構成要素の組合せもまた、特に、分離又は組み合わせることができることが不明瞭である場合でも予見可能である場合でも、本発明の範囲内にあるとみなされる。本明細書でかつ添付の特許請求の範囲を通して用いる「又は」という選言的な用語は、概して、別段の示唆がない限り、連言的意味及び選言的意味の両方を有する「及び/又は」を意味するように意図されている(「排他的論理和」の意味に制限されない)。本明細書の記載においてかつ添付の特許請求の範囲を通して用いる数量を指示しない語は、文脈において明確な別段の指示がない限り、複数の言及を含む。また、本明細書の記載においてかつ添付の特許請求の範囲を通して用いる「内(in)」の意味は、文脈において明確な別段の指示がない限り、「内」及び「上」を含む。
概要又は要約書に記載されるものを含む本発明の例示的な実施形態の上述した説明は、網羅的であるように、すなわち本明細書に開示した厳密な形態に本発明を限定するようには意図されていない。上述したことから、本発明の新規な概念の趣旨及び範囲から逸脱することなく、多数の変形、変更及び置換が意図され、それらを行うことができることが理解されよう。本明細書において例示する具体的な方法及び装置に関するいかなる限定も意図されておらず、推断されるべきではないことが理解されるべきである。当然ながら、こうした全ての変更を添付の特許請求の範囲によってその請求項の範囲内にあるものとして包含することが意図されている。