以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
図1は、第1実施形態における光学式センサ10の機能構成の一例を概略的に示す。光学式センサ10は、測定装置20と、駆動装置110と、投光系90と、受光系60とを備える。投光系90は、発光部180と、レンズ170とを備える。受光系60は、光素子100と、レンズ120と、受光部130とを備える。測定装置20は、制御部140と、測定部150とを有する。
測定装置20は、対象物の形状を光により測定する。具体的には、測定装置20は、対象物の高さを測定することにより、対象物の形状を測定する。本実施形態において、測定装置20は、対象物の表面の、予め定められた基準面からの高さHを測定する。本実施形態において、「高さ」は、投光系90の光軸に沿う方向における、基準面からの距離を示す。本実施形態において、対象物の表面の、予め定められた基準面からの高さのことを「対象物の高さ」と呼ぶ場合がある。
本実施形態において、対象物の表面が基準面から高さH1にある場合と、対象物の表面が基準面から高さH2にある場合と、対象物の表面が基準面から高さH3にある場合とを特に取り上げて説明する場合がある。本実施形態の説明において、表面が基準面からH1の高さにある対象物の反射光を、H1位置からの光と呼ぶ場合がある。同様に、表面が基準面からH2の高さにある対象物の反射光を、H2位置からの光と呼び、表面が基準面からH3の高さにある対象物の反射光を、H3位置からの光と呼ぶ場合がある。
また、実施形態の説明において、xyz座標系を用いて方向等を表す場合がある。直交座標系のz軸を、投光系90の光軸に平行な向きに定める。投光系90からの光が進む方向を、z軸マイナス方向とする。また、投光系90の光軸及び受光系60の光軸を含む面がyz面に平行になるように、y軸を定める。x軸、y軸、z軸は右手系の直交座標系とする。また、実施形態の説明において、受光部130の方向等を表す場合に、XYZ座標系を用いる場合がある。Z軸は、受光部130の光軸に平行な方向に定める。X軸は、x軸と同じ方向に定める。X軸、Y軸、Z軸は右手系の直交座標系とする。
投光系90において、発光部180は、対象物の形状を測定するための光を出射する。発光部180は、例えばレーザダイオード(LD)であり、レーザ光を出射する。発光部180が出射した光は、対象物に入射する。対象物に入射した光は、対象物の表面で反射する。受光系60には、対象物の表面で反射した光のうちの少なくとも一部の光が入射する。
受光系60に入射した光は、光素子100及びレンズ120を通過して、受光部130に入射する。受光部130は、対象物からの光を検出するための部材である。本実施形態において、受光部130は、単一の受光素子を備えるとする。受光素子は、例えばフォトダイオード等の光電変換素子であってよい。
光素子100は、対象物からの光の光路中に設けられる。光素子100は、対象物からの光の光路を変化させる。光素子100は、光路の変更量が可変な光素子である。制御部140は、光素子100の状態を変化させることにより、受光部130に対して光路を変化させる。
駆動装置110は、制御部140の制御に従って、光素子100が変更する光路の変更量を変化させる。対象物の表面が基準面からH1の高さにある場合、H1位置からの光は、光素子100を通過して受光部130に入射する。駆動装置110は、H2位置からの光が、受光部130に入射するように、光素子100による光路の変更量を変化させることができる。また、駆動装置110は、H3位置からの光が、受光部130に入射するように、光素子100による光路の変更量を変化させることができる。
このように、制御部140は、受光部130に対する、対象物からの光の光路を変化させる。具体的には、制御部140は、駆動装置110を制御することにより、光素子100による光路の変更量を変化させる。そして、測定部150は、受光部130が対象物からの光を検出した場合の光路に基づいて、対象物の形状を測定する。例えば、測定部150は、駆動装置110の駆動量を、制御部140から取得する。測定部150は、受光部130が対象物からの光を検出した場合における駆動量に基づいて、基準面からの対象物の表面の高さHを算出する。これにより、測定部150は、対象物の表面形状を測定する。
光学式センサ10によれば、受光部130が対象物からの光を受光するように光素子100を制御することによって、対象物の形状を測定することができる。そのため、対象物の形状を2次元センサの受光レベルから測定する場合に比べて、対象物の形状の測定結果が2次元センサの素子配列の影響を受けにくくすることができる。
図2は、光素子100の一例としてのプリズム系200を概略的に示す。プリズム系200は、第1プリズム101と第2プリズム102とを備える。第1プリズム101及び第2プリズム102は、それぞれウェッジプリズムである。プリズム系200は、リズレープリズム対を形成する。
プリズム系200は、プリズム系200を通過する光の光路を変更する。具体的には、図2に示されるように、プリズム系200は、プリズム系200への入射光を偏向する。より具体的には、プリズム系200への入射光は、第1プリズム101及び第2プリズム102によってそれぞれ偏向される。これにより、プリズム系200からの出射光は、入射光とは異なる向きに進む。
第1プリズム101及び第2プリズム102は、プリズム系200の光軸AXを中心に回転可能に設けられる。駆動装置110は、第1プリズム101及び第2プリズム102を互いに逆回りに回転させる。制御部140は、第1プリズム101及び第2プリズム102の回転角度を示す角度θを、駆動量として駆動装置110に出力する。この場合、駆動装置110は、第1プリズム101の回転角度が基準角度からθになり、第2プリズム102の回転角度が基準角度から−θになるように、第1プリズム101及び第2プリズム102を回転させる。これにより、入射光に対する出射光の偏向角φが、回転角度θに応じて変化する。
このように、制御部140は、第1プリズム101及び第2プリズム102の向きを変化させることにより、受光部130に対して光路を変化させる。プリズム系200において、第1プリズム101及び第2プリズム102の向きとは、プリズム系200の光軸AXのまわりの回転角度に対応する。測定部150は、受光部130が対象物からの光を検出した場合のプリズムの向きに基づいて、対象物の形状を測定することができる。後述する。なお、プリズム系200は、屈折により光路を変更する光素子の一例である。
なお、駆動装置110はガルバノモータであってよい。駆動装置110として、ガルバノモータの他に、サーボモータ、ステッピングモータ等、様々なアクチュエータを適用できる。
なお、本実施形態では、回転角度θの符号について、入射光の進行方向に見た場合の右回り方向をプラス方向として説明する場合がある。また、基準角度に対する第1プリズム101の回転角度を、「プリズム系200の回転角度」と呼ぶ場合がある。
図3は、H1位置からの光が受光部130に入射する場合のプリズム系200の状態を示す。この状態を第1の状態と呼ぶ。第1の状態において、第1プリズム101の入射側の面は、第2プリズム102の出射側の面と平行となっている。この場合、H1位置からの光は、yz面内において実質的に直進する。
図4は、H2位置からの光が受光部130に入射する場合のプリズム系200の状態を示す。この状態を第2の状態と呼ぶ。第2の状態は、図3の第1の状態に対して、第1プリズム101を−90°回転させ、第2プリズム102を90°回転させた状態である。
図5は、H3位置からの光が受光部130に入射する場合のプリズム系200の状態を示す。この状態を第2の状態と呼ぶ。第2の状態は、図3の第1の状態に対して、第1プリズム101を90°回転させ、第2プリズム102を−90°回転させた状態である。
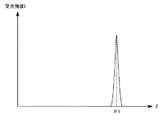
図6は、プリズム系200の回転角度θに対する受光強度Iの依存性を示すグラフである。制御部140は、駆動装置110を制御することにより、プリズム系200の回転角度θを時間的に変化させる。測定部150は、受光部130が出力する受光量信号に基づいて、受光部130の受光強度Iの時間変化を検出する。上述したように、プリズム系200の回転角度θを変化させていくと、対象物の表面の位置に対応する角度において、受光部130の受光強度Iのピークが得られる。
測定部150は、受光部130の受光強度Iを解析することにより、受光強度Iのピークが得られたときのプリズム系200の回転角度θ1を特定する。測定部150は、特定した回転角度θ1に基づいて、対象物の表面の高さHを算出する。
図7は、プリズム系200の回転角度θと対象物の高さHとの対応関係をテーブル形式で示す。測定部150は、プリズム系200の回転角度θを対象物の高さHを対応付ける対応付け情報を記憶する。ここで回転角度θは、受光強度Iのピークが得られたときの回転角度である。図7では、対応付け情報の一例としてのテーブルを示す。テーブルは、複数の回転角度θのそれぞれに対して、対象物の高さHを対応付ける。
測定部150は、受光強度Iのピークが得られたときのプリズム系200の回転角度θが得られた場合、当該テーブルを参照して、テーブルによって回転角度θに対応づけられているHを、物体の高さとして特定する。例えば、測定部150は、受光強度Iのピークが得られたときのプリズム系200の回転角度がθ1である場合、θ1に対応づけられているH1を、物体の高さとして特定する。なお、対応付け情報において参照する回転角度θが離散値である場合、測定部150は、特定した回転角度に最も近い回転角度θに対応付けられている物体の高さHを、物体の高さとして算出してよい。また、測定部150は、複数の回転角度θに対応づけられた複数のHを用いて補間演算等をすることによって、物体の高さを算出してもよい。
対象物の高さHは、三角測量の原理に基づいて、発光部180及び受光部130の位置、発光部180からの照射光の光軸の角度、受光部130及びレンズ120からなる光学系の光軸の角度、並びに、プリズム系200による光路変更量から定まる。一般に、三角測量においては、2つの基準点のそれぞれから測定対象点への角度を測定して、測定された角度と、2つの基準点の位置とに基づいて、2つの基準点を結ぶ基線に対する測定対象点の位置を算出する。光学式センサ10において、プリズム系200が入射光の光路を変更しないとすると、発光部180及び受光部130が、三角測量における2つの基準点に対応し、発光部180からの照射光の光軸の角度、及び、受光部130及びレンズ120からなる光学系の光軸の角度が、三角測量における各基準点から測定対象点への角度に対応する。これにより、三角測量の原理に基づいて、発光部180と発光部180とを結ぶ基線に対する対象物の位置を測定することができ、それにより、特定の基準面からの対象物の高さHを測定できる。光学式センサ10においてはプリズム系200が光路を変更する。そのため、受光部130の位置に対応する三角測量の基準点の位置、及び、当該基準点から測定対象点の角度の少なくとも一方が、プリズム系200の光路変更量に応じて変化するが、それらは、プリズム系200の回転角度θと、受光部130の位置と、受光部130及びレンズ120からなる光学系の光軸の角度とによって定まる。よって、対象物の高さHは、発光部180及び受光部130の位置、発光部180からの照射光の光軸の角度、受光部130及びレンズ120からなる光学系の光軸の角度、並びに、プリズム系200の回転角度θから算出することができる。よって、発光部180及び受光部130の位置、発光部180からの照射光の光軸の角度、受光部130及びレンズ120からなる光学系の光軸の角度が固定の場合、複数の回転角度θのそれぞれについて対象物の高さHを予め算出しておき、図7に示すように回転角度θと対象物の高さHとの対応関係をテーブルとして格納することができる。
なお、測定部150は、テーブルを用いることなく、上述した対象物の高さHの算出方法を適用して、発光部180及び受光部130の位置、発光部180からの照射光の光軸の角度、受光部130及びレンズ120からなる光学系の光軸の角度、並びに、受光強度Iのピークが得られたときのプリズム系200の回転角度θを用いた演算により、対象物の高さHを算出してよい。発光部180及び受光部130の位置、発光部180からの照射光の光軸の角度、受光部130及びレンズ120からなる光学系の光軸の角度が固定の場合は、測定部150は、受光強度Iのピークが得られたときのプリズム系200の回転角度θを用いた演算により、対象物の高さHを算出してよい。対象物の高さHを算出するための演算の実現方法として、発光部180及び受光部130の位置、発光部180からの照射光の光軸の角度、受光部130及びレンズ120からなる光学系の光軸の角度、並びに、プリズム系200の回転角度θを引数とする関数を用いてよい。
上述したテーブルや関数は、プリズム系200の回転角度θに基づいて対象物の高さHを特定するための対応付け情報の一例である。対応付け情報は、テーブルや関数に限られない。対応付け情報として、テーブル及び関数以外の様々なデータを採用できる。
図8は、対象物の形状を光により測定する測定方法の一例を示すフローチャートである。
S802において、制御部140は、駆動装置110を制御して、プリズム系200の回転角度が予め定められた走査開始角度になるまで、プリズム系200を回転させる。S804において、制御部140は、発光部180を制御して、発光部180から光を出射させる。
S806において、測定部150は、受光部130からの受光量信号の読み出しを開始する。S808において、制御部140は、駆動装置110を制御して、プリズム系200の回転を開始させる。ステップS810において、制御部140は、プリズム系200の回転角度が予め定められた走査終了角度に到達したか否かを判断する。S810において、プリズム系200の回転角度が走査終了角度に到達していないと判断した場合、プリズム系200の回転角度が走査終了角度に到達するまで、S810の判断を繰り返す。
S810においてプリズム系200の回転角度が走査終了角度に到達したと判断された場合、S812において、測定部150は、受光部130から得られた受光強度Iのデータに基づいて、受光部130の受光強度Iがピークとなる回転角度θを算出する。測定部150は、S814において、受光部130の受光強度Iがピークとなる回転角度θに基づいて、対象物の高さHを算出する。測定装置20は、S816において、S814で算出した対象物の高さHのデータを、測定部150の外部に出力して、処理を終了する。
なお、本フローチャートによれば、S810において、走査終了角度に到達するまでプリズム系200を回転させる。これに代えて、制御部140は、受光強度Iのピークが検出された場合には、プリズム系200の回転を停止してよい。このように、制御部140は、受光部130によって対象物からの光が検出されるまで、受光部130に対して光路を変化させてよい。
なお、測定装置20の機能は、コンピュータによって実現されてよい。例えば、制御部140及び測定部150の機能は、コンピュータが備えるプロセッサによって実現されてよい。例えば、コンピュータにロードされるプログラムが、図8のフローチャートで示される手順や、制御部140及び測定部150の機能を実現するための手順をプロセッサに実行させてよい。また、コンピュータが備えるプロセッサがプログラムを実行することによって、制御部140に、駆動装置110、受光部130及び発光部180のそれぞれに対する制御信号を出力させ、測定部150に、受光部130が受光した光量を示す受光量信号を受光部130から取得させてよい。測定装置20の具体的なハードウェア構成については後述する。
以上に説明した光学式センサ10によれば、2次元センサのように複数の受光素子を2次元的に設ける必要がない。また、2次元センサの複数の受光素子の出力からピークを算出する必要がない。そのため、測定結果が2次元センサの複数の受光素子の解像力の影響を受けにくい。例えば、対象物の高さHの測定精度が2次元センサの受光素子のピッチ幅の広さによって低下することを抑制できる。また、光学式センサ10においては、光素子100としてプリズム系200を用いている。これにより、光路を変更しても、光路長が大きく変化することがない。そのため、光の歪みや広がりが光路によって大きな差異が生じないようにすることができる。そのため、対象物の高さHの測定精度を高めることができる。
第1実施形態の光学式センサ10は、受光部130が単一の受光素子を備えるとした。受光部130に代えて、ラインセンサを用いることができる。受光部としてラインセンサを用いる形態を第2実施形態として説明する。
図9は、第2実施形態における光学式センサ910の機能構成の一例を概略的に示す。光学式センサ910は、測定装置20と、駆動装置110と、投光系990と、受光系960とを備える。投光系990は、発光部980と、レンズ970とを備える。受光系960は、光素子100と、レンズ120と、受光部930とを備える。測定装置20は、制御部140と、測定部150とを有する。
光学式センサ910が備える構成要素のうち、第1実施形態における光学式センサ10が備える構成要素と略同一の機能を有する構成要素には、同じ符号が付されている。そのため、光学式センサ910については、主として光学式センサ10との相違点を説明し、重複する説明を省略する場合がある。
発光部980は、少なくともx軸方向に広がりを有する光を発する。レンズ970は、発光部980からの光を、x軸方向に広がりを有するライン光に変換して対象物に照射する。このように、投光系990は、x軸方向に広がりを有するライン光を対象物に照射する。すなわち、投光系990は、yz面に略直交する方向に広がったライン光を照射する。
受光部930は、ラインセンサである。受光部930は、長手方向がx軸に沿うように配置される。具体的には、受光部930の複数の受光素子が、x軸に沿う方向に配列される。すなわち、受光部930は、照射光の光軸及び受光部930の光軸を含む面に略直交するように設けられる。光素子100は、光路をyz面内で変化させる。よって、受光部930は、光素子100による光路の変化方向に略直交するよう設けられていることになる。
図10は、照射されるライン光を、受光部130で得られる受光強度Iの信号ととともに概略的に示す。図10は、受光部930、発光部980及びレンズ970の配置及びライン光の状態を、y軸に沿う方向から見た図である。図10において、ライン光は実線で表される。受光部930が受光し得る反射光の範囲は、図10において破線で表される。
一点鎖線は、対象物1000の高さHが低い部分の表面からの反射光の光路を示す。グラフ1001は、対象物1000の高さHが低い部分の表面からの反射光の受光強度Iを示す。二点鎖線は、対象物1000の高さHが高い部分の表面からの反射光の光路を示す。グラフ1002は、対象物1000の高さHが高い部分の表面からの反射光の受光強度Iのグラフである。グラフ1001及びグラフ1002は共に、プリズム系200の回転角度θに対する依存性を示す。
グラフ1001及びグラフ1002に示されるように、受光強度Iのピークが得られる回転角度θが、対象物1000の表面の高さHによって変化する。測定部150は、受光部930が有する各受光素子で受光強度Iのピークが得られる回転角度θから、各受光素子に対応する位置の高さHを算出することができる。このように、光学式センサ910によれば、光切断法を適用して対象物1000の形状を測定することができる。
一般に、エリアセンサに比べると、ラインセンサにおいては、一列あたりの受光素子数を容易に高めることができる。そのため、受光部930としてラインセンサを適用することで、エリアセンサを適用する場合に比べて、対象物1000の表面形状の測定可能範囲を広げることができる。
また、エリアセンサに比べると、ラインセンサにおいては、一列に配置する受光素子の配置密度を比較的容易に高めることができる。そのため、受光部930としてラインセンサを適用することで、エリアセンサを適用する場合に比べて、対象物1000のx軸方向の空間分解能を高めることができる。また、第1実施形態の光学式センサ10に関連して説明したように、光素子100により光路を変更して受光部930で検出するので、測定結果が複数の受光素子の解像力の影響を受けにくい。そのため、例えば、対象物1000の高さHの測定精度が複数の受光素子のピッチ幅の広さによって低下することを抑制できる。
図11は、第3実施形態における光学式センサ1110の機能構成の一例を概略的に示す。光学式センサ1110は、測定装置1120と、駆動装置110と、投光系990と、受光系1160とを備える。投光系990は、発光部980と、レンズ970とを備える。受光系1160は、光素子100と、レンズ120と、受光部1130とを備える。測定装置1120は、制御部140と、測定部150と、切換部1142とを有する。
光学式センサ1110が備える構成要素のうち、第2実施形態における光学式センサ910が備える構成要素と略同一の機能を有する構成要素には、同じ符号が付されている。そのため、光学式センサ1110については、主として光学式センサ910との相違点を説明し、重複する説明を省略する場合がある。
受光部1130は、エリアセンサである。受光部1130は、長手方向がx軸に沿うように配置される。第1の測定モードにおいては、制御部140は、受光部1130に対して光路を変化させる。そして、測定部150は、受光部1130上の予め定められた位置で対象物からの光が検出された場合の光路に基づいて、対象物の形状を測定する。具体的には、第1の測定モードにおいて、第2実施形態に関連して説明したように、光素子100により光路を変化させながら、特定の行に設けられた複数の受光素子のそれぞれの受光強度Iを検出することによって、光切断法を適用して、対象物の高さHを測定する。なお、第1実施形態に関連して説明したように、光素子100により光路を変化させながら、受光部1130が有する複数の受光素子のうち、特定位置にある単一の受光素子の受光強度Iを検出することによって、対象物の高さHを測定してよい。
一方、第2の測定モードにおいて、制御部140は、受光部1130に対して光路が固定された状態で受光部1130に対象物からの光を受光させる。そして、制御部140は、受光部1130上における、対象物からの光が検出された位置に基づいて、対象物の形状を測定する。具体的には、測定部150は、受光部1130においてY方向に配置された複数の受光素子から得られる受光強度分布から、対象物の高さHを算出する。
切換部1142は、第1の測定モードと第2の測定モードとを切り換える。切換部1142は、光学式センサ1110を使用するユーザの選択に基づいて、第1の測定モードと第2の測定モードとを切り換えてよい。切換部1142は、要求される測定精度に基づいて、第1の測定モードと第2の測定モードとを切り換えてよい。一例として、測定精度が要求される場合に第1の測定モードに切り換え、測定精度が要求される場合に第2の測定モードに切り換えてよい。
図12は、受光部1130における受光素子配置と反射光の強度分布を概略的に示す。図12において、○は受光素子の位置を示す。対象物の高さHがx軸方向に一定な部分からの反射光は、図12の強度分布1200に示す帯状の強度分布を持って受光部1130に入射する。強度分布1200の濃淡は、光強度の大きさを示す。濃淡の濃い部分が、光強度の大きい部分を表す。
受光部1130のY軸方向における強度分布のピーク位置は、行1201と行1202との間に存在する。Y軸方向における強度分布のピーク位置を演算で算出する場合、ピーク位置の算出結果には、Y軸方向の受光素子のピッチ幅に応じた誤差が含まれ得る。したがって、対象物の形状の測定結果には、Y軸方向の受光素子のピッチ幅に応じた誤差が含まれ得る。
図13は、プリズム系200の回転角度θを変化させた場合の反射光の強度分布を概略的に示す。プリズム系200の回転角度θを変化させると、図12の強度分布1200に対応する部分はY軸方向にシフトする。測定部150は、強度分布のピーク位置が行1201と一致したときの回転角度θと、行1201の位置とに基づいて、対象物の高さHを算出する。これにより、ピーク位置を高い精度で特定できるので、対象物の高さHの測定誤差を低減することができる。
このように、制御部140は、強度分布のピーク位置が受光素子の行と一致するように、対象物からの光の光路をyz面内において変化させる。測定部150は、制御部140が光路を変化させることによって得られた複数回の測定結果を用いて、対象物の高さHの測定誤差を低減することができる。
ここで、光素子100は、光路をyz面内において変更することに代えて、又は、光路をyz面内において変更することに加えて、xz面内において光路を変化させることができるように構成されてよい。「xz面内において光路を変更する」とは、xz面に投影した場合の光路を変更することを意味する。xz面内において光路を変更すれば、受光部1130の受光素子が検出可能な対象物の位置をx軸方向にずらすことができる。そこで、制御部140は、受光部1130の受光素子が検出可能な対象物の位置が受光素子のピッチ幅未満の距離だけずれるように、光素子100を用いて対象物からの光の光路を変更する。そして、測定部150は、制御部140が光路を変化させることによって得られた複数回の測定結果を用いて、対象物の高さHを高い空間分解能で算出することができる。
このように、制御部140は、対象物からの光の光路を第1の光路にして、対象物からの光を受光部1130の第1の領域に入射させる。また、制御部140は、対象物からの光の光路を第1の光路から第2の光路に変化させて、対象物からの光を受光部1130の第2の領域に入射させる。そして、測定部150は、受光部1130の第1の領域に設けられた複数の受光素子による対象物からの光の検出結果と、受光部1130の第2の領域に設けられた複数の受光素子による対象物からの光の検出結果とに基づいて、対象物の形状を測定する。
図14は、第1実施形態の第1変形例としての光学式センサ1410の投光系90及び受光系1460を概略的に示す。光学式センサ1410は、光素子100としてのプリズム系200に代えて、平板1400を用いた点で、光学式センサ10と異なる。そのため、光学式センサ1410については、主として光学式センサ10との相違点を説明し、重複する説明を省略する場合がある。
平板1400は、光が入射する面である入射面と光が出射する面である出射面とを有する。入射面は出射面と平行である。入射面及び出射面はx軸に平行に設けられる。平板1400は、x軸に平行な軸AX1を中心に回転可能に設けられる。制御部140は、駆動装置110を制御して、平板1400を軸AX1まわりに回転させる。制御部140は、予め定められた基準角度を基準にした平板1400の角度αを示す情報を、駆動装置110に出力する。
図14において、H2位置からの光路が実線で示され、H3位置からの光路が破線で示されている。平板1400が図14の実線で示される角度の状態にある場合、H2位置からの光は受光部130に入射し得る。また、平板1400が図14の破線で示される角度の状態にある場合、H3位置からの光は受光部130に入射し得る。したがって、測定部150は、受光部130で光が検出された場合の平板1400の角度αに基づいて、対象物の高さHを算出する。
このように、制御部140は、平板1400の向きを変化させることにより、受光部130に対して光路を変化させる。そして、測定部150は、受光部130が対象物からの光を検出した場合の平板1400の向きに基づいて、対象物の形状を測定する。なお、平板1400は、屈折により光路を変更する光素子の一例である。
図15は、第1実施形態の第2変形例としての光学式センサ1510の投光系90及び受光系1560を概略的に示す。光学式センサ1510は、光素子100としてのプリズム系200に代えて、平板ミラー1500を用いた点で、光学式センサ10と異なる。そのため、光学式センサ1510については、主として光学式センサ10との相違点を説明し、重複する説明を省略する場合がある。
平板ミラー1500は、x軸に平行な軸AX2を中心に回転可能に設けられる。制御部140は、駆動装置110を制御して、平板ミラー1500を軸AX2まわりに回転させる。制御部140は、予め定められた基準角度を基準にした平板ミラー1500の角度βを示す情報を、駆動装置110に出力する。
図15において、H2位置からの光路が実線で示され、H3位置からの光路が破線で示されている。平板ミラー1500が図15の実線で示される角度の状態にある場合、H2位置からの光は受光部130に入射し得る。また、平板ミラー1500が図15の破線で示される角度の状態にある場合、H3位置からの光は受光部130に入射し得る。制御部140は、平板ミラー1500の向きを変化させることにより、受光部130に対する、対象物からの光の光路を変化させる。そして、測定部150は、受光部130で光が検出された場合の平板ミラー1500の角度に基づいて、対象物の高さHを算出する。このようにして、測定部150は、受光部130が対象物からの光を検出した場合の平板ミラー1500の向きに基づいて、対象物の形状を測定する。
なお、光学式センサ1510においては、1つの反射面を有する平板ミラー1500を例示した。平板ミラー1500は、反射により光路を変更する光素子の一例である。他の変形例として、平板ミラー1500に代えて、ポリゴンミラー、ガルバノミラー等を適用することができる。
図16は、第1実施形態の第3変形例としての光学式センサ1610の投光系90及び受光系1660を概略的に示す。光学式センサ1610は、光素子100としてのプリズム系200に代えて、音響光学偏向器1600を用いた点で、光学式センサ10と異なる。そのため、光学式センサ1610については、主として光学式センサ10との相違点を説明し、重複する説明を省略する場合がある。
音響光学偏向器1600は、第1音響光学偏向器1601と、第2音響光学偏向器1602とを備える。第1音響光学偏向器1601及び第2音響光学偏向器1602は、いずれも、圧電素子等の振動子により超音波が加えられる弾性媒体を有する。超音波により弾性媒体内に生成された粗密波の回折格子によって、入射光が回折され得る。例えば、第1音響光学偏向器1601及び第2音響光学偏向器1602は、ブラッグ効果により入射光を回折する。回折が生じる入射角度は超音波の周波数によって変化する。したがって、制御部140は、第1音響光学偏向器1601及び第2音響光学偏向器1602に設けられた振動子に印加する電気信号の周波数fを示す情報を駆動装置110に出力する。駆動装置110は、制御部140から指定された周波数fで第1音響光学偏向器1601及び第2音響光学偏向器1602のそれぞれの振動子を駆動することにより、特定の入射角で入射する光を偏向させる。
図16において、H2位置からの光路が実線で示され、H3位置からの光路が破線で示されている。音響光学偏向器1600が図16の実線で示される入射角の光を偏向する状態にある場合、H2位置からの光が受光部130に入射し得る。また、音響光学偏向器1600が図16の破線で示される入射角の光を偏向する状態にある場合、H3位置からの光が受光部130に入射し得る。したがって、測定部150は、受光部130で光が検出された場合の音響光学偏向器1600に供給された周波数fに基づいて、対象物の高さHを算出する。
なお、光学式センサ1610においては、2つの音響光学偏向器を用いて対象物からの光の光路を移動させて受光部130に受光させるが、音響光学偏向器の数は2つに限られない。例えば、1つの音響光学偏向器を用いて光路の角度を変化させることで、対象物からの光を受光部130に受光させてよい。また、受光部130に代えて、受光部930のようなラインセンサ又は受光部1130のようなエリアセンサを用いる場合も同様に、1つ以上の音響光学偏向器を用いて光路を変化させることで、ラインセンサ又はエリアセンサ上のいずれかの受光素子に対象物からの光を受光させてよい。
なお、光学式センサ1610における音響光学偏向器1600に代えて、電気光学偏向光器を適用してよい。電気光学偏向器としては、KTN結晶や液晶等の、電界に応じて屈折率が変化する電気光学効果を持つ光素子を例示できる。電気光学偏向器を用いる場合、制御部140は、電気光学偏向器への印加電圧を制御することにより、対象物からの光の光路を制御する。そして、測定部150は、受光部130で光が検出された場合の電気光学偏向器への印加電圧に基づいて、対象物の高さHを算出する。電気光学偏向器は、屈折により光路を変更する光素子の一例である。
図17は、第4実施形態における光学式センサ1710の機能構成の一例を概略的に示す。光学式センサ1710は、測定装置20と、駆動装置110と、投光系1790と、受光系1760とを備える。投光系1790は、発光部980と、レンズ970と、光素子1700とを備える。受光系1760は、レンズ120と、受光部930とを備える。測定装置20は、制御部140と、測定部150とを有する。
光学式センサ1710が備える構成要素のうち、第2実施形態における光学式センサ910が備える構成要素と略同一の機能を有する構成要素には、同じ符号が付されている。そのため、光学式センサ1710については、主として光学式センサ910との相違点を説明し、重複する説明を省略する場合がある。
光素子1700は、対象物に入射する光である入射光の光路中に設けられる。光素子1700は、y軸方向及びx軸方向の少なくとも一方において、対象物への入射光の光路を変更する。例えば、光素子1700は、対象物への入射光を偏向する。
受光部930には、受光部930の光軸上の位置からの光が入射する。ここで、図17に示されるように、光素子1700が入射光をy軸方向に点線で示される角度に偏向した場合に受光部930で光が検出されたとする。測定部150は、光素子1700が入射光を偏向する角度に基づいて、y軸方向の位置Pにおける対象物の高さH3を算出する。
また、光素子1700が入射光をx軸方向に偏向した場合において、測定部150は、受光部930が備える複数の受光素子のうち、光が検出された受光素子の位置と光素子1700による入射光の偏向角度から、高さがH1の位置を算出する。これにより、測定部150は、対象物への入射光の光路を変更することで、対象物の形状を測定することができる。また、光素子1700が入射光をx軸方向に偏向することで、受光部930が有する受光素子が検出できる対象物の位置をずらすことができる。そのため、光学式センサ1710によれば、対象物において高さH1を有する位置を高い空間分解能で検出することができる。
このように、制御部140は、受光部930に対する、対象物に入射する光の光路を変化させる。そして、測定部150は、受光部930が対象物からの光を検出した場合の光路に基づいて、対象物の形状を測定する。なお、第1実施形態、第2実施形態及び第3実施形態の変形例として、それぞれの投光系が光素子1700を備える形態を採用できる。すなわち、制御部140は、受光部930に対する、対象物に入射する光及び対象物からの光の両方の光路を変化させてよい。
図18は、第5実施形態における光学式センサ1810の機能構成の一例を概略的に示す。光学式センサ1810は、測定装置20と、駆動装置110と、投光系990と、受光系1860とを備える。投光系990は、発光部980と、レンズ970とを備える。受光系1860は、レンズ120と、受光部930とを備える。測定装置20は、制御部140と、測定部150とを有する。
光学式センサ1810が備える構成要素のうち、第2実施形態における光学式センサ910が備える構成要素と略同一の機能を有する構成要素には、同じ符号が付されている。そのため、光学式センサ1810については、主として光学式センサ910との相違点を説明し、重複する説明を省略する場合がある。
受光部930は、受光部930の光軸に直交する方向に移動可能に設けられる。例えば、駆動装置110は、Y軸に直交する方向に、受光部930を移動させる。駆動装置110は、制御部140から、受光部930の基準位置からの移動量を示す情報を取得する。駆動装置110は、制御部140から取得した情報に従って、受光部930のY軸方向に受光部930を移動する。このようにして、制御部140は、対象物からの光の光路に対する受光部930の位置を変化させる。
これにより、受光部930は、対象物からの光をY軸方向に走査することができる。測定部150は、受光部930の受光強度のピークが得られた場合のY軸方向の受光部930の位置に基づいて、対象物からの高さHを算出する。
上述したように、エリアセンサに比べて、ラインセンサにおいては、一列あたりの受光素子数を容易に高めることができる。そのため、受光部930としてラインセンサを適用することで、エリアセンサを適用する場合に比べて、x軸方向の対象物の表面形状の測定可能範囲を広げることができる。また、受光部930としてラインセンサを適用することで、エリアセンサを適用する場合に比べて、対象物の表面形状のx軸方向の空間分解能を高めることができる。これに加えて、光学式センサ1810においては、受光部930をY軸方向に走査することができるので、Y軸方向の測定可能範囲及び空間分解能を高めることができる。
なお、制御部140は、受光部930によって対象物からの光が検出されるまで、受光部930の位置を変化させてよい。例えば、制御部140は、受光部930によって対象物からの光が検出された場合に、受光部930の位置の変化を停止させてよい。
以上に説明した実施形態においては、受光系は対象物で生じた拡散反射光の一部を検出する。拡散反射光を検出する方式に代えて、対象物で生じた全反射光を検出する方式を適用してよい。
以上に説明した各実施形態における光学式センサの測定対象は、一例として、基板に形成された電極である。光学式センサの測定対象は、基板に形成されたバンプ等であってよい。光学式センサの測定対象は、トンネルの内壁であってよい。光学式センサの測定対象は、これらに限られない。
以上に説明したように各実施形態における光学式センサによれば、2次元センサのみを用いる場合に比べて、測定精度や測定範囲が2次元センサの素子配置の影響を受けにくくすることができる。
様々な実施形態が、フローチャートおよびブロック図等を参照して説明された。ブロック図において各ブロックは、(1)オペレーションが実行されるプロセスの段階または(2)オペレーションを実行する役割を持つ装置のセクションを表わしてよい。例えば、制御部140及び測定部150のそれぞれは、測定装置20の1つのセクションを表してよい。特定の段階およびセクションが、専用回路、コンピュータ可読媒体上に格納されるコンピュータ可読命令と共に供給されるプログラマブル回路、および/またはコンピュータ可読媒体上に格納されるコンピュータ可読命令と共に供給されるプロセッサによって実装されてよい。専用回路は、デジタルおよび/またはアナログハードウェア回路を含んでよく、集積回路(IC)および/またはディスクリート回路を含んでよい。プログラマブル回路は、論理AND、論理OR、論理XOR、論理NAND、論理NOR、および他の論理オペレーション、フリップフロップ、レジスタ、フィールドプログラマブルゲートアレイ(FPGA)、プログラマブルロジックアレイ(PLA)等のようなメモリ要素等を含む、再構成可能なハードウェア回路を含んでよい。
コンピュータ可読媒体は、適切なデバイスによって実行される命令を格納可能な任意の有形なデバイスを含んでよく、その結果、そこに格納される命令を有するコンピュータ可読媒体は、フローチャートまたはブロック図で指定されたオペレーションを実行するための手段をもたらすべく実行され得る命令を含む製品の少なくとも一部を構成する。コンピュータ可読媒体の例としては、電子記憶媒体、磁気記憶媒体、光記憶媒体、電磁記憶媒体、半導体記憶媒体等が含まれてよい。コンピュータ可読媒体のより具体的な例としては、フロッピー(登録商標)ディスク、ディスケット、ハードディスク、ランダムアクセスメモリ(RAM)、リードオンリメモリ(ROM)、消去可能プログラマブルリードオンリメモリ(EPROMまたはフラッシュメモリ)、電気的消去可能プログラマブルリードオンリメモリ(EEPROM)、静的ランダムアクセスメモリ(SRAM)、コンパクトディスクリードオンリメモリ(CD-ROM)、デジタル多用途ディスク(DVD)、ブルーレイ(RTM)ディスク、メモリスティック、集積回路カード等が含まれてよい。
コンピュータ可読命令は、アセンブラ命令、命令セットアーキテクチャ(ISA)命令、マシン命令、マシン依存命令、マイクロコード、ファームウェア命令、状態設定データ、またはSmalltalk、JAVA(登録商標)、C++等のようなオブジェクト指向プログラミング言語、および「C」プログラミング言語または同様のプログラミング言語のような従来の手続型プログラミング言語を含む、1または複数のプログラミング言語の任意の組み合わせで記述されたソースコードまたはオブジェクトコードのいずれかを含んでよい。
コンピュータ可読命令は、汎用コンピュータ、特殊目的のコンピュータ、若しくは他のプログラム可能なデータ処理装置のプロセッサまたはプログラマブル回路に対し、ローカルにまたはローカルエリアネットワーク(LAN)、インターネット等のようなワイドエリアネットワーク(WAN)を介して提供され、フローチャートまたはブロック図で指定されたオペレーションを実行するための手段をもたらすべく、コンピュータ可読命令を実行してよい。プロセッサの例としては、コンピュータプロセッサ、処理ユニット、マイクロプロセッサ、デジタル信号プロセッサ、コントローラ、マイクロコントローラ等を含む。
図19は、複数の実施形態が全体的または部分的に具現化され得るコンピュータ2000の例を示す。コンピュータ2000にインストールされたプログラムは、コンピュータ2000に、実施形態に係る装置または当該装置の1または複数のセクションとして機能させる、当該装置または当該装置の1または複数のセクションに関連付けられるオペレーションを実行させる、および/または、実施形態に係るプロセスまたは当該プロセスの段階を実行させることができる。そのようなプログラムは、コンピュータ2000に、本明細書に記載のフローチャートおよびブロック図のブロックのうちのいくつかまたはすべてに関連付けられた特定のオペレーションを実行させるべく、CPU2012によって実行されてよい。
本実施形態によるコンピュータ2000は、CPU2012、RAM2014、グラフィックコントローラ2016、および表示デバイス2018を含み、それらはホストコントローラ2010によって相互に接続されている。コンピュータ2000はまた、ROM2030を含む。ROM2030は、入力/出力コントローラ2020を介してホストコントローラ2010に接続されている。コンピュータ2000はまた、通信インタフェース2022、ハードディスクドライブ2024、DVD−ROMドライブ2026、およびメモリカードドライブ2028のような入出力ユニットを含み、それらは入力/出力コントローラ2020を介してホストコントローラ2010に接続されている。コンピュータ2000はまた、キーボード2042のようなレガシの入出力ユニットを含み、それらは入力/出力チップ2040を介して入力/出力コントローラ2020に接続されている。
CPU2012は、ROM2030および/またはRAM2014内に格納されたプログラムに従い動作し、それにより各ユニットを制御する。グラフィックコントローラ2016は、RAM2014内に提供されるフレームバッファ等またはRAM2014内にCPU2012によって生成されたイメージデータを取得し、イメージデータを表示デバイス2018上に表示せせる。
通信インタフェース2022は、ネットワークを介して他の電子デバイスと通信する。ハードディスクドライブ2024は、コンピュータ2000内のCPU2012によって使用されるプログラムおよびデータを格納する。DVD−ROMドライブ2026は、プログラムおよび/またはデータをDVD‐ROM2001から読み取り、RAM2014を介してハードディスクドライブ2024にプログラムおよび/またはデータを提供する。メモリカードドライブ2028は、プログラムおよび/またはデータをメモリカード2003から読み取り、RAM2014を介してハードディスクドライブ2024にプログラムおよび/またはデータを提供する。メモリカードドライブ2028は、プログラムおよび/またはデータをメモリカード2003に書き込んでよい。
ROM2030はその中に、アクティブ化時にコンピュータ2000によって実行されるブートプログラム等、および/またはコンピュータ2000のハードウェアに依存するプログラムを格納する。入力/出力チップ2040はまた、様々な入力/出力ユニットをパラレルポート、シリアルポート、キーボードポート、マウスポート等を介して、入力/出力コントローラ2020に接続してよい。
プログラムが、DVD−ROM2001またはメモリカード2003のようなコンピュータ可読媒体によって提供される。プログラムは、コンピュータ可読媒体から読み取られ、コンピュータ可読媒体の例でもあるハードディスクドライブ2024、RAM2014、および/またはROM2030にインストールされ、CPU2012によって実行される。これらのプログラム内に記述される情報処理は、コンピュータ2000に読み取られ、プログラムと、上記様々な種類のハードウェアリソースとの間の連携をもたらす。装置または方法は、コンピュータ2000の使用に従い情報のオペレーションまたは処理を実現することによって構成されてよい。
例えば、通信がコンピュータ2000および外部デバイス間で実行される場合、CPU2012は、RAM2014にロードされた通信プログラムを実行し、通信プログラムに記述された処理に基づいて、通信インタフェース2022に対し、通信処理を命令してよい。通信インタフェース2022は、CPU2012の制御下、RAM2014、ハードディスクドライブ2024、DVD‐ROM2001、またはメモリカード2003のような記録媒体内に提供される送信バッファ処理領域に格納された送信データを読み取り、読み取られた送信データをネットワークに送信し、またはネットワークから受信した受信データを、記録媒体上に提供される受信バッファ処理領域等に書き込む。
また、CPU2012は、ハードディスクドライブ2024、DVD‐ROM2001、メモリカード2003等のような外部記録媒体に格納されたファイルまたはデータベースの全部または必要な部分がRAM2014に読み取られるようにし、RAM2014上のデータに対し様々な種類の処理を実行してよい。CPU2012は次に、処理されたデータを外部記録媒体にライトバックする。
様々な種類のプログラム、データ、テーブル、およびデータベースのような、様々な種類の情報が記録媒体に格納され、情報処理にかけられてよい。CPU2012は、RAM2014から読み取られたデータに対し、本明細書に記載され、プログラムの命令シーケンスによって指定される様々な種類のオペレーション、情報処理、条件判断、条件分岐、無条件分岐、情報の検索/置換等を含む、様々な種類の処理を実行してよく、結果をRAM2014にライトバックする。また、CPU2012は、記録媒体内のファイル、データベース等における情報を検索してよい。例えば、各々が第2の属性の属性値に関連付けられた第1の属性の属性値を有する複数のエントリが記録媒体内に格納される場合、CPU2012は、第1の属性の属性値が指定されている、条件に一致するエントリを当該複数のエントリの中から検索し、当該エントリ内に格納された第2の属性の属性値を読み取り、それにより予め定められた条件を満たす第1の属性に関連付けられた第2の属性の属性値を取得してよい。
上述したプログラムまたはソフトウェアモジュールは、コンピュータ2000上またはコンピュータ2000近傍のコンピュータ可読媒体に格納されてよい。また、専用通信ネットワークまたはインターネットに接続されたサーバーシステム内に提供されるハードディスクまたはRAMのような記録媒体が、コンピュータ可読媒体として使用可能であり、それによりプログラムを、ネットワークを介してコンピュータ2000に提供してよい。
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
特許請求の範囲、明細書、および図面中において示した装置、システム、プログラム、および方法における動作、手順、ステップ、および段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を後の処理で用いるのでない限り、任意の順序で実現しうることに留意すべきである。特許請求の範囲、明細書、および図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。