JP6890422B2 - 情報処理装置、情報処理装置の制御方法およびプログラム - Google Patents
情報処理装置、情報処理装置の制御方法およびプログラム Download PDFInfo
- Publication number
- JP6890422B2 JP6890422B2 JP2017002117A JP2017002117A JP6890422B2 JP 6890422 B2 JP6890422 B2 JP 6890422B2 JP 2017002117 A JP2017002117 A JP 2017002117A JP 2017002117 A JP2017002117 A JP 2017002117A JP 6890422 B2 JP6890422 B2 JP 6890422B2
- Authority
- JP
- Japan
- Prior art keywords
- orientation
- assembly
- image
- information processing
- assembled
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Description
組み付け先の物体と組み付け元の物体とが組み付けられた場合における両物体間の理想の相対位置姿勢を取得する取得手段と、
前記組み付け先の物体の形状を表す第一の形状モデルおよび前記組み付け元の物体の形状を表す第二の形状モデルと前記理想の相対位置姿勢とに基づいて、前記組み付け先の物体と前記組み付け元の物体とが組み付けられた状態の画像から、前記組み付け元の物体が前記組み付け先の物体を隠蔽する隠蔽領域を特定する特定手段と、
前記隠蔽領域に対して、前記組み付け元の物体が前記組み付け先の物体を隠蔽する度合いに基づいて、前記組み付け先の物体の位置姿勢を取得する際の寄与度を設定する設定手段と、
前記第一の形状モデルまたは前記画像に基づいて、前記組み付け先の物体の位置姿勢を取得するための情報を生成する生成手段と、
前記生成手段により生成された情報と前記寄与度とに基づいて、前記組み付け先の物体の位置姿勢を取得する位置姿勢取得手段と、
を備えることを特徴とする。
<概要>
本実施形態では、情報処理装置を組み付け先部品の位置姿勢算出に適用した場合について説明する。
まずは図2を参照して、本実施形態に係る情報処理装置1の構成例を説明する。情報処理装置1は、モデル取得部110と、相対位置姿勢取得部120と、画像取得部130と、概略位置姿勢取得部140と、隠蔽領域特定部150と、位置姿勢取得部160とを備えている。
次に、本実施形態における、組み付け先部品20の位置姿勢算出の処理手順について説明する。図3は、本実施形態に係る情報処理装置1が実施する位置姿勢算出の処理手順を示すフローチャートである。
画像取得部120は、2部品が組み付けられた状態の組み付け済み部品30の濃淡画像および距離画像を取得する。まず、2次元画像撮影装置40から濃淡画像を取得する。同様に、距離画像撮影装置50から距離画像を取得する。本実施形態では、距離画像には距離画像撮影装置50から計測対象物体の表面までの距離が格納されているものとする。
概略位置姿勢取得部は、2次元画像撮影装置40と距離画像撮影装置50とを含んで構成される撮影装置に対する組み付け先部品20の位置および姿勢の概略値(後述の概略位置姿勢710)を取得する。前述のように、本実施形態では組み付け先部品20が置かれているおおよその位置や姿勢があらかじめわかっているものとして、その値を概略値として用いる。
隠蔽領域特定部150は、ステップS1100で取得された位置および姿勢の概略値と、3次元形状モデル100および200と、組み付け位置姿勢とを用いて、濃淡画像および距離画像上で、組み付け先部品20が隠蔽される領域を特定する。
図7に示すように、仮想カメラ700を用意し、仮想カメラ700を基準として、ステップS1100で取得された概略位置姿勢710に組み付け先部品20の3次元形状モデル200を配置する。ここで仮想カメラ700の内部パラメータは、2次元画像撮影装置40および距離画像撮影装置50とできるだけ同一の値にするのが望ましい。しかし、必ずしも同一の値を用いる必要はない。2次元画像撮影装置40および距離画像撮影装置50と、後述するステップS1230で作成する領域特定画像とで、画素の対応がとれるのであれば、異なる内部パラメータを用いてもかまわない。
ステップS1210で配置した組み付け先部品20の3次元形状モデル200を基準として、相対位置姿勢取得部120で取得された組み付け位置姿勢720に、組み付け元部品10の3次元形状モデル100を配置する。
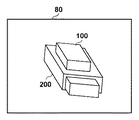
ステップS1210およびS1220で配置した2つのモデルを仮想カメラ700で観測した仮想画像80を図8に示す。本ステップでは、組み付け先部品20の3次元形状モデル200が、組み付け元部品10の3次元形状モデル100により隠蔽されうる領域を特定可能な画像80を作成する。具体的には、配置した2部品の3次元形状モデルを仮想画像平面730に描画して仮想画像80を作成する。このとき、隠面処理を行って視点からは陰になり見えない部分を消去して描画する。
位置姿勢取得部160は、組み付け先部品20の3次元形状モデル200と、濃淡画像および距離画像との対応関係を用いて、組み付け先部品20の位置姿勢の算出を行う。その際、領域特定画像を参照することで、隠蔽領域の影響を低減する。以下、図5のフローチャートを用いて詳述する。
位置姿勢取得部160は、領域特定画像を利用して、組み付け先部品20の3次元形状モデル200から位置姿勢を取得するための情報として幾何特徴を抽出、生成する。本実施形態においては、3次元形状モデルは、複数のNURBS(Non−UniformRational B−Spline)曲面で構成されているものとする。当該モデルの幾何特徴には、3次元の位置および法線とから構成される物体表面上の局所的な3次元平面情報(以後、「局所面特徴」と称する)と3次元の位置および方向とから構成される物体輪郭上の局所的な3次元線分情報(以後、「局所線特徴」と称する)を抽出するものとする。
位置姿勢取得部160は、ステップS1210において取得された、組み付け先部品20の概略位置姿勢に基づき、ステップS1000で計測された距離画像中の3次元点群と、3次元形状モデル200との対応付けを行う。部品の概略位置姿勢と距離画像撮影装置50の内部パラメータとを用いて、ステップS1310で抽出した各局所面特徴を距離画像上に投影する。そして、投影した各局所面特徴に対応する距離画像上の距離点を、各面に対応する3次元点として保持する。
位置姿勢取得部160は、ステップS1320で得られた、3次元形状モデル中の各面に対応する距離画像中の3次元点と、3次元形状モデル中の各線分に対応する濃淡画像上のエッジとの対応データに基づいて、組み付け先部品20および組み付け元部品10の位置姿勢を算出する。本ステップでは、算出した対応データに基づいて、計測データと3次元形状モデルとの間の誤差が最小になるように、線形連立方程式を解くことで、位置姿勢の更新を行う。
位置姿勢取得部160は、ステップS1330で更新した位置姿勢が、収束しているか否か、すなわち、さらに反復計算を必要とするか否かの判定を行う。具体的には、補正値がほぼ0である場合や、誤差ベクトルの二乗和の補正前と補正後との差がほぼ0である場合に収束したと判定する。収束していなければ(S1400;NO)、ステップS1100に戻り、更新した位置姿勢を用いて、再度位置姿勢推定処理を行う。収束していると判断した場合は(S1400;YES)、処理を終了し、撮影装置に対する、組み付け先部品20の位置姿勢の最終的な推定値が決定される。
本実施形態では、組み付け先部品20の計測を例に説明した。しかし、組み付け元品10の位置姿勢算出においても同様の方法をもちろん適用可能である。組み付け元部品10が組み付け先部品20によって隠蔽される状況である場合には、本実施形態と同様の方法を用いて、組み付け先部品20による隠蔽部位の影響を除外して位置姿勢算出を行うことで、ロバストかつ高精度な推定が可能である。
ここまで述べた方法を利用してさらに、組み付けが正しく行われたか否かの判定(組み付け成否判定)を行ってもよい。組み付け成否の判定は、図13に示すように、実施形態1の装置構成に、組み付け成否判定部170を追加することで実施可能である。まず、前述した方法により位置姿勢算出部160は、組み付けられた状態の組み付け元部品10、および、組み付け先部品20の位置姿勢をそれぞれ算出する。その後、算出したそれぞれの位置姿勢に基づき、両者の相対位置姿勢を算出する。これに対して、組み付け成否判定部170は、理想的な組み付け状態における、組み付け元部品10と組み付け先部品20との相対位置姿勢をあらかじめ保持しておき、算出された相対位置姿勢との比較を行う。この結果、位置姿勢に関する両者の差分が所定の値以上であった場合には組み付け失敗、所定の値未満であった場合には組み付け成功と判定する。なお、成否判定には、位置の差分あるいは姿勢の差分のいずれかのみ用いてもよい。これにより、組み付けにより部品間で相互に隠蔽が発生した状況においても組み付け成否を安定的に行うことが可能である。
上述の実施形態では、2つの部品から構成される組み付け済み部品30を対象とした事例について述べた。しかし、3つ以上の部品で構成される組み付け済み部品に対して、そのうちの1部品の位置姿勢を算出する場合にも同様の方法を適用可能である。この場合にも、構成部品の既知の組み付け情報に基づき、画像撮影上で計測対象の部品が隠蔽される領域を特定し、隠蔽部位からはモデル幾何特徴を抽出せずに位置姿勢算出を行う。これにより、隠蔽部位の影響を除外して、ロバストかつ高精度な推定が可能である。
第1の実施形態では、隠蔽なく観測可能な部位からモデル幾何特徴を抽出して位置姿勢を算出する方法について述べた。
第2の実施形態では、各部位が隠蔽されるか否かの判定結果に基づいてモデル幾何特徴を抽出することで、隠蔽による影響を受けずに位置姿勢を算出する方法について述べた。これに対して、モデル幾何特徴の代わりに、撮影画像から隠蔽が発生する部位を除外して、位置姿勢算出を行ってもよい。この場合、ステップS1310では、隠蔽の発生有無にかかわらず、モデル幾何特徴を抽出しておく。また、その際に、モデル幾何特徴に対する属性の付与も行わない。代わりに、ステップS1320においてモデル幾何特徴の対応探索実施後、対応づいた画素の領域特定画像を参照し、その画素が隠蔽領域の場合には、その対応を無効化して位置姿勢算出には利用しない。
第1の実施形態および第2の実施形態では、複数部品の組み付けにより構成される組み付け済み部品のうちの1部品の位置姿勢算出を安定的に行う方法について述べた。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (13)
- 組み付け先の物体と組み付け元の物体とが組み付けられた場合における両物体間の理想の相対位置姿勢を取得する取得手段と、
前記組み付け先の物体の形状を表す第一の形状モデルおよび前記組み付け元の物体の形状を表す第二の形状モデルと前記理想の相対位置姿勢とに基づいて、前記組み付け先の物体と前記組み付け元の物体とが組み付けられた状態の画像から、前記組み付け元の物体が前記組み付け先の物体を隠蔽する隠蔽領域を特定する特定手段と、
前記隠蔽領域に対して、前記組み付け元の物体が前記組み付け先の物体を隠蔽する度合いに基づいて、前記組み付け先の物体の位置姿勢を取得する際の寄与度を設定する設定手段と、
前記第一の形状モデルまたは前記画像に基づいて、前記組み付け先の物体の位置姿勢を取得するための情報を生成する生成手段と、
前記生成手段により生成された情報と前記寄与度とに基づいて、前記組み付け先の物体の位置姿勢を取得する位置姿勢取得手段と、
を備えることを特徴とする情報処理装置。 - 前記第一の形状モデルおよび前記第二の形状モデルをそれぞれ取得するモデル取得手段をさらに備えることを特徴とする請求項1に記載の情報処理装置。
- 前記生成手段は、前記第一の形状モデルのモデル特徴を前記情報として生成し、
前記位置姿勢取得手段は、前記情報として生成された前記モデル特徴と前記画像中の画像特徴とを前記寄与度に基づいて対応付けて前記組み付け先の物体の位置姿勢を取得する請求項1または2に記載の情報処理装置。 - 前記生成手段は、前記画像中の画像特徴を前記情報として生成し、
前記位置姿勢取得手段は、前記情報として生成された前記画像特徴と前記第一の形状モデルのモデル特徴とを前記寄与度に基づいて対応付けて前記組み付け先の物体の位置姿勢を取得する請求項1または2に記載の情報処理装置。 - 前記画像中の画像特徴は、前記画像の幾何特徴であることを特徴とする請求項3または4に記載の情報処理装置。
- 前記特定手段は、前記組み付け先の物体の概略位置姿勢と、前記理想の相対位置姿勢とに基づいて、前記隠蔽領域を特定することを特徴とする請求項1乃至5の何れか1項に記載の情報処理装置。
- 前記特定手段は、前記組み付け先の物体の概略位置姿勢に基づいて前記組み付け先の物体の第一の形状モデルをレンダリングした結果と、前記理想の相対位置姿勢に基づいて求められる前記組み付け元の物体の概略位置姿勢に基づいて前記組み付け元の物体をレンダリングした結果とに基づいて、前記隠蔽領域を特定することを特徴とする請求項6に記載の情報処理装置。
- 前記特定手段は、前記組み付け元の物体の概略位置姿勢と前記組み付け元の物体の第二の形状モデルとに基づいて前記画像中で前記組み付け元の物体が占める領域を示す画像を生成することにより、前記隠蔽領域を特定することを特徴とする請求項1乃至5の何れか1項に記載の情報処理装置。
- 更に、前記隠蔽領域と前記組み付け元の物体の第二の形状モデルとに基づいて、前記組み付け元の物体の位置姿勢を取得する第二の位置姿勢取得手段を備えることを特徴とする請求項1乃至8の何れか1項に記載の情報処理装置。
- 前記組み付け先の物体の位置姿勢と前記組み付け元の物体の位置姿勢とに基づいて、前記組み付け先の物体と前記組み付け元の物体との実際の相対位置姿勢を推定する推定手段と、
前記推定された実際の相対位置姿勢に基づいて、前記組み付け先の物体と前記組み付け元の物体との組み付け状態を判定する判定手段を更に備えることを特徴とする請求項9に記載の情報処理装置。 - 前記判定手段は、前記実際の相対位置姿勢と前記理想の相対位置姿勢との差分に基づいて、前記組み付け状態を判定することを特徴とする請求項10に記載の情報処理装置。
- 情報処理装置の制御方法であって、
組み付け先の物体と組み付け元の物体とが組み付けられた場合における両物体間の理想の相対位置姿勢を取得する取得工程と、
前記組み付け先の物体の形状を表す第一の形状モデルおよび前記組み付け元の物体の形状を表す第二の形状モデルと前記理想の相対位置姿勢とに基づいて、前記組み付け先の物体と前記組み付け元の物体とが組み付けられた状態の画像から、前記組み付け元の物体が前記組み付け先の物体を隠蔽する隠蔽領域を特定する特定工程と、
前記隠蔽領域に対して、前記組み付け元の物体が前記組み付け先の物体を隠蔽する度合いに基づいて、前記組み付け先の物体の位置姿勢を取得する際の寄与度を設定する設定工程と、
前記第一の形状モデルまたは前記画像に基づいて、前記組み付け先の物体の位置姿勢を取得するための情報を生成する生成工程と、
前記生成工程で生成された情報と前記寄与度とに基づいて、前記組み付け先の物体の位置姿勢を取得する位置姿勢取得工程と、
を有することを特徴とする情報処理装置の制御方法。 - コンピュータを、請求項1乃至11の何れか1項に記載の情報処理装置の各手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/443,429 US10252417B2 (en) | 2016-03-02 | 2017-02-27 | Information processing apparatus, method of controlling information processing apparatus, and storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016040445 | 2016-03-02 | ||
| JP2016040445 | 2016-03-02 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017162449A JP2017162449A (ja) | 2017-09-14 |
| JP2017162449A5 JP2017162449A5 (ja) | 2020-02-13 |
| JP6890422B2 true JP6890422B2 (ja) | 2021-06-18 |
Family
ID=59857125
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017002117A Active JP6890422B2 (ja) | 2016-03-02 | 2017-01-10 | 情報処理装置、情報処理装置の制御方法およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6890422B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7191569B2 (ja) * | 2018-07-26 | 2022-12-19 | Ntn株式会社 | 把持装置 |
| US11006039B1 (en) | 2020-02-13 | 2021-05-11 | Mujin, Inc. | Method and system for determining occlusion within a camera field of view |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6444027B2 (ja) * | 2013-12-09 | 2018-12-26 | キヤノン株式会社 | 情報処理装置、情報処理装置の制御方法、情報処理システムおよびプログラム |
| JP6306903B2 (ja) * | 2014-03-06 | 2018-04-04 | キヤノン株式会社 | 情報処理装置、情報処理装置の制御方法およびプログラム |
| JP6264208B2 (ja) * | 2014-06-30 | 2018-01-24 | 富士通株式会社 | 表示プログラム、表示方法、および表示装置 |
-
2017
- 2017-01-10 JP JP2017002117A patent/JP6890422B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017162449A (ja) | 2017-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6444027B2 (ja) | 情報処理装置、情報処理装置の制御方法、情報処理システムおよびプログラム | |
| US20200096317A1 (en) | Three-dimensional measurement apparatus, processing method, and non-transitory computer-readable storage medium | |
| JP5567908B2 (ja) | 3次元計測装置、その計測方法及びプログラム | |
| JP6465789B2 (ja) | デプスカメラの内部パラメータを算出するプログラム、装置及び方法 | |
| JP5839929B2 (ja) | 情報処理装置、情報処理システム、情報処理方法及びプログラム | |
| JP6573354B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP6426968B2 (ja) | 情報処理装置およびその方法 | |
| JP6370038B2 (ja) | 位置姿勢計測装置及び方法 | |
| JP6271953B2 (ja) | 画像処理装置、画像処理方法 | |
| JP6324025B2 (ja) | 情報処理装置、情報処理方法 | |
| JP6092530B2 (ja) | 画像処理装置、画像処理方法 | |
| JP6067175B2 (ja) | 位置測定装置及び位置測定方法 | |
| JP6677522B2 (ja) | 情報処理装置、情報処理装置の制御方法およびプログラム | |
| JP6836561B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP2016197287A (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP2016109669A (ja) | 情報処理装置、情報処理方法、プログラム | |
| JP2016170050A (ja) | 位置姿勢計測装置、位置姿勢計測方法及びコンピュータプログラム | |
| JP2017123087A (ja) | 連続的な撮影画像に映り込む平面物体の法線ベクトルを算出するプログラム、装置及び方法 | |
| US10252417B2 (en) | Information processing apparatus, method of controlling information processing apparatus, and storage medium | |
| JP2016148649A (ja) | 情報処理装置、情報処理装置の制御方法、およびプログラム | |
| JP6890422B2 (ja) | 情報処理装置、情報処理装置の制御方法およびプログラム | |
| JP6040264B2 (ja) | 情報処理装置、情報処理装置の制御方法、およびプログラム | |
| JP5976089B2 (ja) | 位置姿勢計測装置、位置姿勢計測方法、およびプログラム | |
| JP2014053018A (ja) | 情報処理装置、情報処理装置の制御方法及びプログラム | |
| JP6486083B2 (ja) | 情報処理装置、情報処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191227 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191227 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210103 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210215 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210426 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210525 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6890422 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |