JP6873237B2 - 画像ベースの車両損害評価方法、装置、およびシステム、ならびに電子デバイス - Google Patents
画像ベースの車両損害評価方法、装置、およびシステム、ならびに電子デバイス Download PDFInfo
- Publication number
- JP6873237B2 JP6873237B2 JP2019524075A JP2019524075A JP6873237B2 JP 6873237 B2 JP6873237 B2 JP 6873237B2 JP 2019524075 A JP2019524075 A JP 2019524075A JP 2019524075 A JP2019524075 A JP 2019524075A JP 6873237 B2 JP6873237 B2 JP 6873237B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- damaged
- vehicle
- damage
- processed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000006378 damage Effects 0.000 title claims description 359
- 238000000034 method Methods 0.000 title claims description 180
- 238000012545 processing Methods 0.000 claims description 126
- 238000012423 maintenance Methods 0.000 claims description 122
- 238000013527 convolutional neural network Methods 0.000 claims description 78
- 230000008569 process Effects 0.000 claims description 56
- 238000004422 calculation algorithm Methods 0.000 claims description 38
- 230000009466 transformation Effects 0.000 claims description 37
- 238000012549 training Methods 0.000 claims description 35
- 238000013528 artificial neural network Methods 0.000 claims description 30
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 claims description 27
- 238000005070 sampling Methods 0.000 claims description 24
- 238000011156 evaluation Methods 0.000 claims description 22
- 239000013598 vector Substances 0.000 claims description 15
- 230000008439 repair process Effects 0.000 claims description 12
- 238000007635 classification algorithm Methods 0.000 claims description 7
- 238000003066 decision tree Methods 0.000 claims description 5
- 230000000977 initiatory effect Effects 0.000 claims description 2
- 238000003384 imaging method Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 24
- 238000004891 communication Methods 0.000 description 15
- 238000004590 computer program Methods 0.000 description 14
- 238000004364 calculation method Methods 0.000 description 13
- 230000006870 function Effects 0.000 description 10
- 238000000605 extraction Methods 0.000 description 9
- 230000006872 improvement Effects 0.000 description 9
- 230000009471 action Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 7
- 206010039203 Road traffic accident Diseases 0.000 description 6
- 238000003672 processing method Methods 0.000 description 6
- 230000004044 response Effects 0.000 description 6
- 238000000844 transformation Methods 0.000 description 6
- 230000004913 activation Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 5
- 239000000047 product Substances 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 4
- 238000010801 machine learning Methods 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 238000012512 characterization method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 238000011835 investigation Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000002085 persistent effect Effects 0.000 description 3
- 238000007747 plating Methods 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 230000014616 translation Effects 0.000 description 3
- 238000004458 analytical method Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 238000011176 pooling Methods 0.000 description 2
- 238000013515 script Methods 0.000 description 2
- 230000009528 severe injury Effects 0.000 description 2
- 239000007921 spray Substances 0.000 description 2
- 239000003826 tablet Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000006227 byproduct Substances 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 230000001364 causal effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 238000013499 data model Methods 0.000 description 1
- 238000013135 deep learning Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000012854 evaluation process Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 238000013467 fragmentation Methods 0.000 description 1
- 238000006062 fragmentation reaction Methods 0.000 description 1
- 229910021389 graphene Inorganic materials 0.000 description 1
- 239000007943 implant Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 230000009525 mild injury Effects 0.000 description 1
- 230000009526 moderate injury Effects 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 239000010979 ruby Substances 0.000 description 1
- 229910001750 ruby Inorganic materials 0.000 description 1
- 238000006748 scratching Methods 0.000 description 1
- 230000002393 scratching effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 239000004984 smart glass Substances 0.000 description 1
- 238000007592 spray painting technique Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000012795 verification Methods 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q40/00—Finance; Insurance; Tax strategies; Processing of corporate or income taxes
- G06Q40/08—Insurance
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
- G06F18/2413—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches based on distances to training or reference patterns
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
- G06N20/20—Ensemble learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/01—Dynamic search techniques; Heuristics; Dynamic trees; Branch-and-bound
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0631—Resource planning, allocation, distributing or scheduling for enterprises or organisations
- G06Q10/06313—Resource planning in a project environment
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
- G06Q10/063—Operations research, analysis or management
- G06Q10/0639—Performance analysis of employees; Performance analysis of enterprise or organisation operations
- G06Q10/06395—Quality analysis or management
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/20—Administration of product repair or maintenance
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
- G06T7/001—Industrial image inspection using an image reference approach
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/17—Image acquisition using hand-held instruments
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
- G06V10/443—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components by matching or filtering
- G06V10/449—Biologically inspired filters, e.g. difference of Gaussians [DoG] or Gabor filters
- G06V10/451—Biologically inspired filters, e.g. difference of Gaussians [DoG] or Gabor filters with interaction between the filter responses, e.g. cortical complex cells
- G06V10/454—Integrating the filters into a hierarchical structure, e.g. convolutional neural networks [CNN]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/46—Descriptors for shape, contour or point-related descriptors, e.g. scale invariant feature transform [SIFT] or bags of words [BoW]; Salient regional features
- G06V10/462—Salient features, e.g. scale invariant feature transforms [SIFT]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/50—Extraction of image or video features by performing operations within image blocks; by using histograms, e.g. histogram of oriented gradients [HoG]; by summing image-intensity values; Projection analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/23—Clustering techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30136—Metal
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- Human Resources & Organizations (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Data Mining & Analysis (AREA)
- Multimedia (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Economics (AREA)
- Strategic Management (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- General Business, Economics & Management (AREA)
- Marketing (AREA)
- Quality & Reliability (AREA)
- Entrepreneurship & Innovation (AREA)
- Mathematical Physics (AREA)
- Tourism & Hospitality (AREA)
- Development Economics (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Computational Linguistics (AREA)
- Biomedical Technology (AREA)
- Operations Research (AREA)
- Educational Administration (AREA)
- Databases & Information Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Biophysics (AREA)
- Finance (AREA)
- Accounting & Taxation (AREA)
- Game Theory and Decision Science (AREA)
Description
e Description Language)などといった、2つ以上のタイプのHDLが存在する。現時点、VHDL(Very-High-Speed Integrated Circuit Hardware Description Language)およびVerilogが最も一般的に使用されている。方法の手順がいくつかの前述のハードウェア記述言語を使用してローカルでプログラムされているならば論理的な方法の手順を実装するハードウェア回路を容易に得ることができることも当業者は理解されたい。
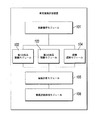
102 第1の部品認識モジュール
103 第2の部品認識モジュール
104 損傷認識モジュール
105 損傷計算モジュール
106 損傷評価処理モジュール
1031 特徴抽出モジュール
1032 領域マッチングモジュール
1033 アフィン変換処理モジュール
1034 コンポーネント決定モジュール
Claims (15)
- 車両損傷を評価するための画像ベースの方法であって、前記方法は、
クラウドサーバにおいて、モバイルデバイスから、処理対象画像を取得するステップであって、前記処理対象画像は、前記モバイルデバイスを使用して撮られ、モバイルアプリケーションを使用して前記クラウドサーバにアップロードされた、損傷車両部分の画像を含む、ステップと、
前記処理対象画像を調査し、前記処理対象画像中の車両部品を識別するステップと、
識別車両部品を含む部品画像と前記処理対象画像中の未識別車両部品を含む局所的画像との間で画像マッチングを行い、前記局所的画像中の車両部品を識別するステップと、
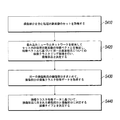
前記処理対象画像を調査し、前記処理対象画像中の損傷部分および損傷タイプを識別するステップと、
前記識別車両部品、前記識別した損傷部分、および前記識別した損傷タイプに基づいて、前記処理対象画像中の損傷部品と前記損傷部品に対応する損傷部分、損傷タイプ、および損傷度とを決定するステップであって、前記損傷タイプは整備プランに対応するように設定される、ステップと、
前記処理対象画像中の前記決定した損傷部品と前記損傷部品に対応する前記決定した損傷部分および損傷タイプとを含む情報に基づいて、整備プランを生成するステップと
を含み、
前記識別車両部品を含む部品画像と前記処理対象画像中の未識別車両部品を含む前記局所的画像との間で画像マッチングを行い、前記局所的画像中の車両部品を識別するステップは、
畳み込みニューラルネットワークを使用して前記局所的画像の第1の畳み込み特徴データを抽出し、所定のアルゴリズムを使用して前記局所的画像の第1の局所的特徴点セットを抽出するステップと、
前記第1の畳み込み特徴データを前記部品画像中のサンプリング領域の畳み込み特徴データと比較し、畳み込み特徴データが前記第1の畳み込み特徴データと最も類似している類似領域を取得するステップと、
前記所定のアルゴリズムを使用して前記類似領域の第2の局所的特徴点セットを抽出し、前記第1の局所的特徴点セットと前記第2の局所的特徴点セットとをマッチングして一致する点のペアを取得し、アフィン変換における前記一致する点のペアの位置誤差を最小化することによって前記局所的画像と前記部品画像との間のアフィン変換を取得するステップと、
前記局所的画像中の前記車両部品として、前記部品画像中にあるとともに最小の位置誤差を有する画像領域に対応する部品を選択するステップと
を含む、方法。 - 前記第1の畳み込み特徴データを前記部品画像中のサンプリング領域の畳み込み特徴データと比較し、畳み込み特徴データが前記第1の畳み込み特徴データと最も類似している類似領域を取得するステップは、
前記部品画像について、スライドウィンドウを使用して前記部品画像中のスライドウィンドウ領域の第2の畳み込み特徴データを抽出し、第2の畳み込み特徴データセットを取得するステップであって、前記第2の畳み込み特徴データは、前記第1の畳み込み特徴データを抽出するために使用される前記畳み込みニューラルネットワークと同一の畳み込みニューラルネットワークを使用して取得される、ステップと、
前記第2の畳み込み特徴データセットから、畳み込み特徴データが前記第1の畳み込み特徴データと最も類似している前記類似領域を選択するステップであって、類似度はコサイン類似度を使用して計算される、ステップと
を含む、請求項1に記載の方法。 - 前記方法は、
所定の方式で前記類似領域の画像領域範囲を拡張するステップをさらに含み、
それに対応するように、前記第2の局所的特徴点セットは、画像領域範囲が拡張された前記類似領域の抽出した局所的特徴点セットを含む、請求項1に記載の方法。 - 前記所定の方式で前記類似領域の画像領域範囲を拡張するステップは、所定の割合で前記類似領域の左側、右側、上側、および下側を拡張するステップであって、前記所定の割合の値域は50%を含む、ステップを含む、請求項3に記載の方法。
- 前記処理対象画像を取得するステップの後に、
前記処理対象画像が複数のタイプの画像情報を含む場合には、画像分類アルゴリズムを使用して前記処理対象画像を分類し、車両損害評価処理のための画像として、車両損害評価処理情報に関連している画像を選択するステップ、または、
前記処理対象画像の画像品質を決定し、画像品質が要件を満たしていない処理対象画像を削除するステップ、または、
類似度が所定の閾値に達している処理対象画像に対する重複排除処理を行うステップ、といった画像処理のうちの少なくとも1つのタイプをさらに行う、請求項1に記載の方法。 - 前記方法は、前記損傷部品の整備方針に関する情報を取得するステップをさらに含み、それに対応するように、前記整備プランは、前記整備方針に対応する概算修理価格をさらに含み、前記概算修理価格は、前記整備方針における前記損傷部品の製品および/または修理サービスの価格データを問い合わせた後に、前記損傷部品、前記損傷部分、前記損傷タイプ、および前記整備方針に関する前記情報に基づいた計算によって得られる、前記損傷部品の概算修理価格である、請求項1に記載の方法。
- 前記処理対象画像は、ディープニューラルネットワークを含む識別モデルを使用して調査され、前記ディープニューラルネットワークは、
サンプルデータの訓練を経て構築および生成されるとともに、
畳み込み層および領域提案層を含むネットワークモデルに基づく、請求項1に記載の方法。 - 前記処理対象画像中の前記損傷部品と前記損傷部品に対応する前記損傷部分および前記損傷タイプとは、
損傷部分を含む処理対象画像のセットを取得することと、
畳み込みニューラルネットワークを使用して前記セット内の前記処理対象画像の特徴ベクトルを抽出し、前記特徴ベクトルに基づいて同一の車両部品についての画像クラスタリング処理を行い、前記損傷部品を決定することと、
同一の損傷部品における損傷部分をまとめて、前記損傷部分の損傷クラスタ特徴データを取得することと、
前記損傷クラスタ特徴データに基づいて、前記損傷部品に含まれる前記損傷部分および前記損傷部分に対応する前記損傷タイプを決定することと
を行う方式を使用して決定される、請求項7に記載の方法。 - 前記同一の損傷部品における損傷部分をまとめて、前記損傷部分の損傷クラスタ特徴データを取得するステップは、
画像クラスタに同一の損傷サンプル部品についての処理対象画像から信頼性レベルの降順で選択されたK個の処理対象画像中の損傷部分をまとめるステップであって、K≧2である、ステップと、
前記まとめた画像クラスタから、損傷部分の加重値の降順でC個の処理対象画像の損傷クラスタ特徴データを選択するステップであって、C≧2であり、前記加重値の重み因子は損傷部分の信頼性レベルである、ステップと
を含む、請求項8に記載の方法。 - 前記損傷クラスタ特徴データに基づいて損傷サンプル画像中の損傷部分および損傷タイプを識別するステップは、所定のマルチクラス分類勾配ブースティング決定木モデルの入力データとして前記損傷クラスタ特徴データを使用して前記損傷部分および前記損傷タイプを識別するステップを含む、請求項9に記載の方法。
- 前記処理対象画像を調査し、前記処理対象画像中の車両部品を識別するステップと、前記処理対象画像を調査し、前記処理対象画像中の損傷部分および損傷タイプを識別するステップとは並列して行われる、請求項1に記載の方法。
- 前記クラウドサーバによって、前記モバイルデバイスに、前記生成した整備プランを返信するステップ、または、
整備業務を行うために作業割当データを選択した車両整備工場を送信することによって前記生成した整備プランを開始するステップ
のうちの1つまたは複数をさらに含む、請求項1に記載の方法。 - 画像ベースの車両損害評価装置であって、前記装置は、プロセッサと、プロセッサ実行可能命令を記憶するように構成されるメモリとを含み、前記命令を実行すると、前記プロセッサが請求項1から12のいずれか一項に記載の処理を実施する、装置。
- コンピュータ可読記憶媒体であって、前記コンピュータ可読記憶媒体はコンピュータ命令を記憶し、前記命令が実行されると、請求項1から12のいずれか一項に記載のステップが実施される、コンピュータ可読記憶媒体。
- 車両損傷を評価するための装置であって、前記装置は、モバイルデバイスと通信するクラウドサーバを含み、
前記クラウドサーバは、プロセッサと、前記プロセッサが実行することができる命令を記憶するように構成される、メモリとを含み、前記命令が実行されると、前記プロセッサは、
クラウドサーバにおいて、モバイルデバイスから、処理対象画像を取得することと、
前記処理対象画像を調査し、前記処理対象画像中の車両部品を識別することと、
識別車両部品を含む部品画像と前記処理対象画像中の未識別車両部品を含む局所的画像との間で画像マッチングを行い、前記局所的画像中の車両部品を識別することと、
前記処理対象画像を調査し、前記処理対象画像中の損傷部分および損傷タイプを識別することと、
前記識別車両部品、前記識別した損傷部分、および前記識別した損傷タイプに基づいて、前記処理対象画像中の損傷部品と前記損傷部品に対応する損傷部分および損傷タイプとを決定することであって、前記損傷タイプは整備プランに対応するように設定される、ことと、
前記処理対象画像中の前記決定した損傷部品と前記損傷部品に対応する前記決定した損傷部分および損傷タイプとを含む情報に基づいて、整備プランを生成することと、
前記クラウドサーバによって、前記モバイルデバイスに、前記生成した整備プランを返信することと
を含む処理を実施し、
前記識別車両部品を含む部品画像と前記処理対象画像中の未識別車両部品を含む前記局所的画像との間で画像マッチングを行い、前記局所的画像中の車両部品を識別することは、
畳み込みニューラルネットワークを使用して前記局所的画像の第1の畳み込み特徴データを抽出し、所定のアルゴリズムを使用して前記局所的画像の第1の局所的特徴点セットを抽出することと、
前記第1の畳み込み特徴データを前記部品画像中のサンプリング領域の畳み込み特徴データと比較し、畳み込み特徴データが前記第1の畳み込み特徴データと最も類似している類似領域を取得することと、
前記所定のアルゴリズムを使用して前記類似領域の第2の局所的特徴点セットを抽出し、前記第1の局所的特徴点セットと前記第2の局所的特徴点セットとをマッチングして一致する点のペアを取得し、アフィン変換における前記一致する点のペアの位置誤差を最小化することによって前記局所的画像と前記部品画像との間のアフィン変換を取得することと、
前記局所的画像中の前記車両部品として、前記部品画像中にあるとともに最小の位置誤差を有する画像領域に対応する部品を選択することと
を含み、
前記モバイルデバイスは、プロセッサと、前記プロセッサが実行することができる命令を記憶するように構成される、メモリとを含み、前記命令が実行されると、前記プロセッサは、
前記モバイルデバイスにインストールされたモバイルアプリケーションによって、車両損害評価サービスを要求することであって、
前記モバイルデバイスを使用して損傷車両部分の写真を撮ることと、
モバイルアプリケーションを使用して前記クラウドサーバに処理対象画像として前記写真をアップロードすることと、
前記クラウドサーバから、車両についての整備プランを受信することと
を含む、要求することと
を含む処理を実施する、装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710232956.8A CN107358596B (zh) | 2017-04-11 | 2017-04-11 | 一种基于图像的车辆定损方法、装置、电子设备及系统 |
| CN201710232956.8 | 2017-04-11 | ||
| US15/950,786 | 2018-04-11 | ||
| PCT/US2018/027194 WO2018191437A1 (en) | 2017-04-11 | 2018-04-11 | Image-based vehicle loss assessment method, apparatus, and system, and electronic device |
| US15/950,786 US20180293552A1 (en) | 2017-04-11 | 2018-04-11 | Image-based vehicle maintenance plan |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020504358A JP2020504358A (ja) | 2020-02-06 |
| JP6873237B2 true JP6873237B2 (ja) | 2021-05-19 |
Family
ID=60271548
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019555669A Active JP6874150B2 (ja) | 2017-04-11 | 2018-04-11 | ピクチャベースの車両損害査定の方法および装置、ならびに電子デバイス |
| JP2019524075A Active JP6873237B2 (ja) | 2017-04-11 | 2018-04-11 | 画像ベースの車両損害評価方法、装置、およびシステム、ならびに電子デバイス |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019555669A Active JP6874150B2 (ja) | 2017-04-11 | 2018-04-11 | ピクチャベースの車両損害査定の方法および装置、ならびに電子デバイス |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US20180293552A1 (ja) |
| EP (1) | EP3520045B8 (ja) |
| JP (2) | JP6874150B2 (ja) |
| KR (1) | KR102151365B1 (ja) |
| CN (1) | CN107358596B (ja) |
| MY (1) | MY193739A (ja) |
| PH (1) | PH12019500971A1 (ja) |
| SG (1) | SG11201903904VA (ja) |
| TW (1) | TWI684922B (ja) |
| WO (2) | WO2018191437A1 (ja) |
Families Citing this family (167)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10740891B1 (en) * | 2016-05-20 | 2020-08-11 | Ccc Information Services Inc. | Technology for analyzing images depicting vehicles according to base image models |
| CN106651881B (zh) * | 2016-12-28 | 2023-04-28 | 同方威视技术股份有限公司 | 车辆检查系统、车辆部位识别方法及系统 |
| US10399106B2 (en) * | 2017-01-19 | 2019-09-03 | Ford Global Technologies, Llc | Camera and washer spray diagnostic |
| CN112435215B (zh) | 2017-04-11 | 2024-02-13 | 创新先进技术有限公司 | 一种基于图像的车辆定损方法、移动终端、服务器 |
| CN107392218B (zh) | 2017-04-11 | 2020-08-04 | 创新先进技术有限公司 | 一种基于图像的车辆定损方法、装置及电子设备 |
| CN111914692B (zh) | 2017-04-28 | 2023-07-14 | 创新先进技术有限公司 | 车辆定损图像获取方法及装置 |
| CN108090838B (zh) * | 2017-11-21 | 2020-09-29 | 阿里巴巴集团控股有限公司 | 识别车辆受损部件的方法、装置、服务器、客户端及系统 |
| CN108171255A (zh) * | 2017-11-22 | 2018-06-15 | 广东数相智能科技有限公司 | 基于图像识别的图片联想强度评分方法及装置 |
| US10460431B2 (en) * | 2018-01-15 | 2019-10-29 | Otis Elevator Company | Part recognition and damage characterization using deep learning |
| CN108334906B (zh) * | 2018-02-08 | 2021-02-23 | 北京鑫车科技有限公司 | 一种金融典当服务的抵押物自动识别评估方法和装置 |
| CN108399382A (zh) * | 2018-02-13 | 2018-08-14 | 阿里巴巴集团控股有限公司 | 车险图像处理方法和装置 |
| CN108446618A (zh) * | 2018-03-09 | 2018-08-24 | 平安科技(深圳)有限公司 | 车辆定损方法、装置、电子设备及存储介质 |
| CN108550080A (zh) * | 2018-03-16 | 2018-09-18 | 阿里巴巴集团控股有限公司 | 物品定损方法及装置 |
| CN108921811B (zh) * | 2018-04-03 | 2020-06-30 | 阿里巴巴集团控股有限公司 | 检测物品损伤的方法和装置、物品损伤检测器 |
| CN108764046A (zh) * | 2018-04-26 | 2018-11-06 | 平安科技(深圳)有限公司 | 车辆损伤分类模型的生成装置、方法及计算机可读存储介质 |
| CN108628287A (zh) * | 2018-04-27 | 2018-10-09 | 重庆车云金服科技股份有限公司 | 汽车维修方案智能评估方法及系统 |
| CN108632530B (zh) * | 2018-05-08 | 2021-02-23 | 创新先进技术有限公司 | 一种车辆定损的数据处理方法、装置、设备及客户端、电子设备 |
| CN108921068B (zh) * | 2018-06-22 | 2020-10-20 | 深源恒际科技有限公司 | 一种基于深度神经网络的汽车外观自动定损方法及系统 |
| EP3588451A1 (en) * | 2018-06-26 | 2020-01-01 | Ningbo Geely Automobile Research & Development Co. Ltd. | Repair instruction device and method |
| CA3050400A1 (en) * | 2018-07-24 | 2020-01-24 | Philip Kroell | Methods for assessing conditioning of a total loss vehicle and devices thereof |
| CN110569693B (zh) * | 2018-08-16 | 2023-05-12 | 创新先进技术有限公司 | 车体颜色识别方法及装置 |
| CN109242006A (zh) * | 2018-08-23 | 2019-01-18 | 阿里巴巴集团控股有限公司 | 基于车型分类的识别车辆损伤的方法及装置 |
| CN110569856B (zh) * | 2018-08-24 | 2020-07-21 | 阿里巴巴集团控股有限公司 | 样本标注方法及装置、损伤类别的识别方法及装置 |
| CN109242762A (zh) * | 2018-08-27 | 2019-01-18 | 北京铂石空间科技有限公司 | 图像识别方法、装置、存储介质及电子设备 |
| CN110569695B (zh) * | 2018-08-31 | 2021-07-09 | 创新先进技术有限公司 | 基于定损图像判定模型的图像处理方法和装置 |
| CN110569696A (zh) * | 2018-08-31 | 2019-12-13 | 阿里巴巴集团控股有限公司 | 用于车辆部件识别的神经网络系统、方法和装置 |
| CN110569697A (zh) * | 2018-08-31 | 2019-12-13 | 阿里巴巴集团控股有限公司 | 车辆的部件检测方法、装置及设备 |
| CN110569694A (zh) * | 2018-08-31 | 2019-12-13 | 阿里巴巴集团控股有限公司 | 车辆的部件检测方法、装置及设备 |
| CN110570388A (zh) * | 2018-08-31 | 2019-12-13 | 阿里巴巴集团控股有限公司 | 车辆的部件检测方法、装置及设备 |
| CN110567728B (zh) * | 2018-09-03 | 2021-08-20 | 创新先进技术有限公司 | 用户拍摄意图的识别方法、装置及设备 |
| CN110569864A (zh) * | 2018-09-04 | 2019-12-13 | 阿里巴巴集团控股有限公司 | 基于gan网络的车损图像生成方法和装置 |
| EP3620984B1 (en) * | 2018-09-06 | 2024-04-10 | Accenture Global Solutions Limited | Digital quality control using computer visioning with deep learning |
| US11928581B2 (en) * | 2018-09-14 | 2024-03-12 | Arm Limited | System and method for compressing kernels |
| CN110570389B (zh) * | 2018-09-18 | 2020-07-17 | 阿里巴巴集团控股有限公司 | 车辆损伤识别方法及装置 |
| CN109443301B (zh) * | 2018-09-25 | 2021-09-10 | 平安科技(深圳)有限公司 | 一种车辆定损方法、计算机可读存储介质及服务器 |
| CN110569700B (zh) * | 2018-09-26 | 2020-11-03 | 创新先进技术有限公司 | 优化损伤识别结果的方法及装置 |
| CN109359676A (zh) * | 2018-10-08 | 2019-02-19 | 百度在线网络技术(北京)有限公司 | 用于生成车辆损伤信息的方法和装置 |
| CN109410218B (zh) * | 2018-10-08 | 2020-08-11 | 百度在线网络技术(北京)有限公司 | 用于生成车辆损伤信息的方法和装置 |
| CN109544623B (zh) * | 2018-10-11 | 2021-07-27 | 百度在线网络技术(北京)有限公司 | 车辆损伤区域的测量方法和装置 |
| CN109215027B (zh) * | 2018-10-11 | 2024-05-24 | 平安科技(深圳)有限公司 | 一种基于神经网络的车辆定损方法、服务器及介质 |
| CN109214399B (zh) * | 2018-10-12 | 2021-01-01 | 清华大学深圳研究生院 | 一种嵌入SENet结构的改进YOLOV3目标识别方法 |
| CN113228055B (zh) * | 2018-10-19 | 2024-04-12 | 克莱米特有限责任公司 | 配置和利用卷积神经网络以识别植物病害的方法和介质 |
| CN109508715B (zh) * | 2018-10-30 | 2022-11-08 | 南昌大学 | 一种基于深度学习的车牌定位和识别方法 |
| CN109635651B (zh) * | 2018-11-07 | 2024-05-24 | 中国平安财产保险股份有限公司 | 一种基于图像识别的车辆定损方法、存储介质及服务器 |
| WO2020102584A2 (en) * | 2018-11-14 | 2020-05-22 | Intuitive Surgical Operations, Inc. | Convolutional neural networks for efficient tissue segmentation |
| CN109635142B (zh) * | 2018-11-15 | 2022-05-03 | 北京市商汤科技开发有限公司 | 图像选择方法及装置、电子设备和存储介质 |
| CN109584230A (zh) * | 2018-11-26 | 2019-04-05 | 深圳龙图腾创新设计有限公司 | 辅助质检方法、装置、计算机设备及可读存储介质 |
| TWI700646B (zh) * | 2018-11-27 | 2020-08-01 | 中華電信股份有限公司 | 一種資訊整合之干擾查測系統與方法 |
| CN109900702A (zh) * | 2018-12-03 | 2019-06-18 | 阿里巴巴集团控股有限公司 | 车辆损伤检测的处理方法、装置、设备、服务器和系统 |
| CN109657716B (zh) * | 2018-12-12 | 2020-12-29 | 中汽数据(天津)有限公司 | 一种基于深度学习的车辆外观损伤识别方法 |
| CN109635742A (zh) * | 2018-12-13 | 2019-04-16 | 深源恒际科技有限公司 | 一种车辆图像定损中的子部件损伤识别方法 |
| CN109684956A (zh) * | 2018-12-14 | 2019-04-26 | 深源恒际科技有限公司 | 一种基于深度神经网络的车辆损伤检测方法及系统 |
| CN109635824A (zh) * | 2018-12-14 | 2019-04-16 | 深源恒际科技有限公司 | 一种图像匹配深度学习方法及系统 |
| CN110033011A (zh) * | 2018-12-14 | 2019-07-19 | 阿里巴巴集团控股有限公司 | 车祸事故处理方法和装置、电子设备 |
| CN109784171A (zh) * | 2018-12-14 | 2019-05-21 | 平安科技(深圳)有限公司 | 车辆定损图像筛选方法、装置、可读存储介质及服务器 |
| US11037440B2 (en) * | 2018-12-19 | 2021-06-15 | Sony Group Corporation | Vehicle identification for smart patrolling |
| CN110569701B (zh) * | 2018-12-29 | 2020-08-07 | 阿里巴巴集团控股有限公司 | 计算机执行的车辆定损方法及装置 |
| KR102097120B1 (ko) * | 2018-12-31 | 2020-04-09 | 주식회사 애자일소다 | 딥러닝 기반의 자동차 부위별 파손정도 자동 판정 시스템 및 방법 |
| KR102096386B1 (ko) * | 2018-12-31 | 2020-04-03 | 주식회사 애자일소다 | 딥러닝 기반의 자동차 부위별 파손정도 자동 판정을 위한 모델 학습 방법 및 시스템 |
| CN110009509B (zh) * | 2019-01-02 | 2021-02-19 | 创新先进技术有限公司 | 评估车损识别模型的方法及装置 |
| CN109815997B (zh) * | 2019-01-04 | 2024-07-19 | 平安科技(深圳)有限公司 | 基于深度学习的识别车辆损伤的方法和相关装置 |
| US10887582B2 (en) | 2019-01-22 | 2021-01-05 | Fyusion, Inc. | Object damage aggregation |
| JP2022523478A (ja) * | 2019-01-22 | 2022-04-25 | フュージョン、インク. | マルチビュー視覚データからの損傷検出 |
| US11783443B2 (en) | 2019-01-22 | 2023-10-10 | Fyusion, Inc. | Extraction of standardized images from a single view or multi-view capture |
| US11176704B2 (en) | 2019-01-22 | 2021-11-16 | Fyusion, Inc. | Object pose estimation in visual data |
| CN109948811A (zh) * | 2019-01-31 | 2019-06-28 | 德联易控科技(北京)有限公司 | 车辆定损的处理方法、装置及电子设备 |
| CN109886344A (zh) * | 2019-02-26 | 2019-06-14 | 广东工业大学 | 基于深度学习的皮革破损识别方法、系统及设备和介质 |
| CN109885718B (zh) * | 2019-02-28 | 2021-05-28 | 江南大学 | 一种基于深度车贴检测的嫌疑车辆检索方法 |
| CN109902629A (zh) * | 2019-03-01 | 2019-06-18 | 成都康乔电子有限责任公司 | 一种复杂交通场景下的实时车辆目标检测模型 |
| DK3709219T3 (da) * | 2019-03-13 | 2022-09-05 | Ravin Ai Ltd | System og fremgangsmåde til automatisk detektering af skader i køretøjer |
| CN110163761B (zh) * | 2019-03-27 | 2023-05-12 | 蚂蚁金服(杭州)网络技术有限公司 | 基于图像处理的可疑项目成员识别方法及装置 |
| CN110135437B (zh) * | 2019-05-06 | 2022-04-05 | 北京百度网讯科技有限公司 | 用于车辆的定损方法、装置、电子设备和计算机存储介质 |
| CN110287768A (zh) * | 2019-05-06 | 2019-09-27 | 浙江君嘉智享网络科技有限公司 | 图像智能识别车辆定损方法 |
| JP2022537636A (ja) * | 2019-05-09 | 2022-08-29 | オートモビリア ツー リミテッド ライアビリティ カンパニー | メディア処理および表示のための方法、システム、およびコンピュータ・ プログラム製品 |
| DE102019112289B3 (de) * | 2019-05-10 | 2020-06-18 | Controlexpert Gmbh | Verfahren zur Schadenserfassung bei einem Kraftfahrzeug |
| EP3739507A1 (en) * | 2019-05-14 | 2020-11-18 | Banco Bilbao Vizcaya Argentaria, S.A. | Method and system for obtaining information about an object based on a photograph thereof |
| CN110276258A (zh) * | 2019-05-21 | 2019-09-24 | 智慧互通科技有限公司 | 一种识别车辆外观的方法及系统 |
| CN110210536A (zh) * | 2019-05-22 | 2019-09-06 | 北京邮电大学 | 一种光互连系统的物理损伤诊断方法及装置 |
| JP7117272B2 (ja) * | 2019-06-06 | 2022-08-12 | 株式会社日立ビルシステム | 保守支援システムおよび方法 |
| JP7462386B2 (ja) * | 2019-06-14 | 2024-04-05 | 株式会社シマノ | 検出装置、検出方法、生成方法、コンピュータプログラムおよび記憶媒体 |
| CN110458186B (zh) * | 2019-06-26 | 2021-08-31 | 山东大学 | 基于局部参考相似性编码的乳腺超声图像分类方法及系统 |
| CN110472656B (zh) * | 2019-07-03 | 2023-09-05 | 平安科技(深圳)有限公司 | 车辆图像分类方法、装置、计算机设备及存储介质 |
| TWI703511B (zh) * | 2019-07-09 | 2020-09-01 | 洽吧智能股份有限公司 | 螢幕裂損檢測系統 |
| EP3997658A4 (en) * | 2019-07-12 | 2023-06-21 | The Nielsen Company (US), LLC | DE-DUPLICATION ACROSS MULTIPLE DIFFERENT DATA SOURCES TO IDENTIFY COMMON DEVICES |
| CN110399816B (zh) * | 2019-07-15 | 2023-04-07 | 广西大学 | 一种基于Faster R-CNN的高速列车车底异物检测方法 |
| CN110334693A (zh) * | 2019-07-17 | 2019-10-15 | 中国电子科技集团公司第五十四研究所 | 一种面向深度学习的遥感图像目标样本生成方法 |
| CN110569383A (zh) * | 2019-07-26 | 2019-12-13 | 平安科技(深圳)有限公司 | 店铺信息处理方法、装置、存储介质及计算机设备 |
| CN112307231A (zh) * | 2019-07-29 | 2021-02-02 | 阿里巴巴集团控股有限公司 | 信息处理、模型训练、特征库创建方法及电子设备 |
| CN110516746A (zh) * | 2019-08-29 | 2019-11-29 | 吉林大学 | 一种基于无标签数据的驾驶员跟车行为风格分类方法 |
| CN110598621A (zh) * | 2019-09-06 | 2019-12-20 | 高新兴科技集团股份有限公司 | 车辆品牌识别方法、装置、设备及计算机可读存储介质 |
| US11410287B2 (en) * | 2019-09-09 | 2022-08-09 | Genpact Luxembourg S.à r.l. II | System and method for artificial intelligence based determination of damage to physical structures |
| CN110660000A (zh) * | 2019-09-09 | 2020-01-07 | 平安科技(深圳)有限公司 | 数据预测方法、装置、设备及计算机可读存储介质 |
| DE102019125320A1 (de) * | 2019-09-20 | 2021-03-25 | Audi Ag | Automatisches Behandeln eines Kollisionsschadens eines Fahrzeugs |
| US11721010B2 (en) | 2019-09-22 | 2023-08-08 | Openlane, Inc. | Vehicle self-inspection apparatus and method |
| WO2021064776A1 (ja) * | 2019-09-30 | 2021-04-08 | 日立建機株式会社 | 疲労管理システム |
| CN110738576B (zh) * | 2019-10-14 | 2021-08-06 | 支付宝(杭州)信息技术有限公司 | 为受损车辆生成定损文件的方法及装置 |
| US11829128B2 (en) | 2019-10-23 | 2023-11-28 | GM Global Technology Operations LLC | Perception system diagnosis using predicted sensor data and perception results |
| WO2021084381A1 (en) * | 2019-10-28 | 2021-05-06 | 3M Innovative Properties Company | Automated vehicle repair system |
| CN110796105A (zh) * | 2019-11-04 | 2020-02-14 | 中国矿业大学 | 一种基于多模态数据融合的遥感图像语义分割方法 |
| JP7015503B2 (ja) * | 2019-12-18 | 2022-02-03 | Arithmer株式会社 | 貸与対象物管理システム、貸与対象物管理プログラム及び貸与対象物管理方法。 |
| WO2021136944A1 (en) * | 2020-01-03 | 2021-07-08 | Tractable Ltd | Method of universal automated verification of vehicle damage |
| CN111209957B (zh) * | 2020-01-03 | 2023-07-18 | 平安科技(深圳)有限公司 | 车辆部件识别方法、装置、计算机设备及存储介质 |
| US11687778B2 (en) | 2020-01-06 | 2023-06-27 | The Research Foundation For The State University Of New York | Fakecatcher: detection of synthetic portrait videos using biological signals |
| US11562474B2 (en) | 2020-01-16 | 2023-01-24 | Fyusion, Inc. | Mobile multi-camera multi-view capture |
| US11776142B2 (en) | 2020-01-16 | 2023-10-03 | Fyusion, Inc. | Structuring visual data |
| CN111310631B (zh) * | 2020-02-10 | 2021-05-07 | 湖南大学 | 一种旋翼作业飞行机器人目标跟踪方法及系统 |
| CN113505624A (zh) * | 2020-03-23 | 2021-10-15 | 虹软科技股份有限公司 | 车辆定损方法、车辆定损装置及应用其的电子设备 |
| TWI723823B (zh) * | 2020-03-30 | 2021-04-01 | 聚晶半導體股份有限公司 | 基於神經網路的物件偵測裝置和物件偵測方法 |
| US20210304153A1 (en) * | 2020-03-30 | 2021-09-30 | Lyft, Inc. | Utilizing a transportation matching system in conjunction with a multi-track vehicle service center to service transportation vehicles |
| US11210869B2 (en) * | 2020-03-31 | 2021-12-28 | Calpro Adas Solutions, Llc | Vehicle safety feature identification and calibration |
| US11468198B2 (en) * | 2020-04-01 | 2022-10-11 | ImageKeeper LLC | Secure digital media authentication and analysis |
| KR102148884B1 (ko) * | 2020-04-02 | 2020-08-27 | 주식회사 애자일소다 | 차량의 손상 분석 시스템 및 방법 |
| US11935219B1 (en) | 2020-04-10 | 2024-03-19 | Allstate Insurance Company | Systems and methods for automated property damage estimations and detection based on image analysis and neural network training |
| CN111783517B (zh) * | 2020-05-13 | 2024-05-07 | 北京达佳互联信息技术有限公司 | 图像识别方法、装置、电子设备及存储介质 |
| JP7031935B2 (ja) * | 2020-05-19 | 2022-03-08 | Necプラットフォームズ株式会社 | 寿命通知装置、寿命通知システム、寿命通知方法及び寿命通知プログラム |
| CN111666434B (zh) * | 2020-05-26 | 2021-11-02 | 武汉大学 | 基于深度全局特征的街景图片检索方法 |
| CN111695615A (zh) * | 2020-05-28 | 2020-09-22 | 平安科技(深圳)有限公司 | 基于人工智能的车辆定损方法、装置、电子设备及介质 |
| CN111666995B (zh) * | 2020-05-29 | 2024-04-09 | 平安科技(深圳)有限公司 | 基于深度学习模型的车辆定损方法、装置、设备及介质 |
| CN111709352B (zh) * | 2020-06-12 | 2022-10-04 | 浪潮集团有限公司 | 一种基于神经网络的车辆划痕检测方法 |
| CN111667392B (zh) * | 2020-06-12 | 2023-06-16 | 成都国铁电气设备有限公司 | 一种基于时空聚类的铁路接触网缺陷热点区域预警方法 |
| CN111488875B (zh) * | 2020-06-24 | 2021-04-13 | 爱保科技有限公司 | 基于图像识别的车险理赔核损方法、装置和电子设备 |
| CN111612104B (zh) * | 2020-06-30 | 2021-04-13 | 爱保科技有限公司 | 车辆定损图像获取方法、装置、介质和电子设备 |
| WO2022015236A1 (en) * | 2020-07-17 | 2022-01-20 | Hitachi, Ltd. | Method of image processing for object identification and system thereof |
| US11488117B2 (en) * | 2020-08-27 | 2022-11-01 | Mitchell International, Inc. | Systems and methods for managing associations between damaged parts and non-reusable parts in a collision repair estimate |
| US11328402B2 (en) | 2020-09-29 | 2022-05-10 | Hong Kong Applied Science and Technology Research Institute Company Limited | Method and system of image based anomaly localization for vehicles through generative contextualized adversarial network |
| US12033192B2 (en) | 2020-10-30 | 2024-07-09 | Toyota Motor North America, Inc. | Transport use determination |
| CN112329772B (zh) * | 2020-11-06 | 2024-03-05 | 浙江大搜车软件技术有限公司 | 车辆部件识别方法、装置、电子装置和存储介质 |
| CA3206364A1 (en) * | 2020-11-09 | 2022-05-12 | Automobilia Ii, Llc | Methods, systems and computer program products for media processing and display |
| CN112232351B (zh) * | 2020-11-09 | 2023-10-10 | 浙江工业职业技术学院 | 一种基于深度神经网络的车牌识别系统 |
| CN112785547A (zh) * | 2020-11-11 | 2021-05-11 | 平高集团有限公司 | 一种电极触头表面损伤识别方法和系统 |
| CN112070250B (zh) * | 2020-11-13 | 2021-05-04 | 深圳壹账通智能科技有限公司 | 车辆定损方法、装置、终端设备及存储介质 |
| CN112330666B (zh) * | 2020-11-26 | 2022-04-29 | 成都数之联科技股份有限公司 | 基于改进孪生网络的图像处理方法及系统及装置及介质 |
| CN112270313A (zh) * | 2020-12-21 | 2021-01-26 | 德联易控科技(北京)有限公司 | 线上理赔方法、装置、设备及存储介质 |
| CN112686308A (zh) * | 2020-12-28 | 2021-04-20 | 青岛鼎信通讯股份有限公司 | 一种基于kh与fcm的低压台区归属识别方法及系统 |
| CN112785561A (zh) * | 2021-01-07 | 2021-05-11 | 天津狮拓信息技术有限公司 | 一种基于改进Faster RCNN预测模型的二手商用车车况检测方法 |
| CN112801951A (zh) * | 2021-01-15 | 2021-05-14 | 深圳市商汤科技有限公司 | 目标部件的损伤检测方法、装置、设备及存储介质 |
| KR102263067B1 (ko) * | 2021-01-26 | 2021-06-09 | 박형근 | 제품의 부품 교체 필요성을 판단하는 서버 및 그 동작 방법 |
| US11971953B2 (en) | 2021-02-02 | 2024-04-30 | Inait Sa | Machine annotation of photographic images |
| CN112818884B (zh) * | 2021-02-07 | 2021-11-30 | 中国科学院大学 | 一种人群计数方法 |
| WO2022175044A1 (en) * | 2021-02-18 | 2022-08-25 | Inait Sa | Annotation of 3d models with signs of use visible in 2d images |
| US11544914B2 (en) | 2021-02-18 | 2023-01-03 | Inait Sa | Annotation of 3D models with signs of use visible in 2D images |
| US11605151B2 (en) | 2021-03-02 | 2023-03-14 | Fyusion, Inc. | Vehicle undercarriage imaging |
| CN113139572B (zh) * | 2021-03-09 | 2022-08-02 | 西南交通大学 | 一种基于图像的列车空气弹簧的故障检测方法 |
| CN112689114B (zh) * | 2021-03-11 | 2021-06-22 | 太平金融科技服务(上海)有限公司 | 对车辆的目标位置进行确定的方法、装置、设备和介质 |
| CN115115866A (zh) * | 2021-03-18 | 2022-09-27 | 华晨宝马汽车有限公司 | 图像分类模型的训练方法及图像识别方法 |
| CN113034114A (zh) * | 2021-04-01 | 2021-06-25 | 苏州惟信易量智能科技有限公司 | 一种基于可穿戴设备的流程控制系统及方法 |
| US20240193935A1 (en) * | 2021-04-21 | 2024-06-13 | Siemens Mobility GmbH | Automated selection and semantic connection of images |
| US20220358637A1 (en) * | 2021-05-10 | 2022-11-10 | Ccc Intelligent Solutions Inc. | Methods and systems of utilizing image processing systems to measure objects |
| CN112990158A (zh) * | 2021-05-14 | 2021-06-18 | 太平金融科技服务(上海)有限公司深圳分公司 | 车险数据处理方法、装置、计算机设备和存储介质 |
| CN113486725A (zh) * | 2021-06-11 | 2021-10-08 | 爱保科技有限公司 | 智能车辆定损方法及装置、存储介质及电子设备 |
| WO2023017617A1 (ja) * | 2021-08-13 | 2023-02-16 | コグニビジョン株式会社 | 車両画像から車両の損傷情報を推定するための情報処理装置、方法、及びプログラム、並びに学習済みモデルを生成するための方法及びシステム |
| CN113640308B (zh) * | 2021-08-31 | 2024-03-29 | 夏冰心 | 一种基于机器视觉的轨道异常监测系统 |
| CN113781454B (zh) * | 2021-09-15 | 2023-09-08 | 平安科技(深圳)有限公司 | 一种车辆损伤检测方法、装置、设备及存储介质 |
| CN113822447A (zh) * | 2021-09-23 | 2021-12-21 | 深圳市星卡科技有限公司 | 一种用于汽车保养的智能检测方法、装置及车载设备 |
| US12118779B1 (en) * | 2021-09-30 | 2024-10-15 | United Services Automobile Association (Usaa) | System and method for assessing structural damage in occluded aerial images |
| US20240346640A1 (en) * | 2021-10-08 | 2024-10-17 | Ola Electric Mobility Limited | Damage assessment for vehicles |
| US20230131632A1 (en) * | 2021-10-25 | 2023-04-27 | Argo AI, LLC | Systems, Methods, and Computer Program Products for Severity Classifications of Simulated Collisions |
| WO2023083182A1 (en) * | 2021-11-09 | 2023-05-19 | Alpha Ai Technology Limited | A system for assessing a damage condition of a vehicle and a platform for facilitating repairing or maintenance services of a vehicle |
| CN114530043A (zh) * | 2022-03-03 | 2022-05-24 | 上海闪马智能科技有限公司 | 一种事件检测方法、装置、存储介质及电子装置 |
| CN114739293A (zh) * | 2022-03-25 | 2022-07-12 | 北京博联众睿机器人科技有限公司 | 车身测量方法、系统、装置以及电子设备 |
| CN114842198B (zh) * | 2022-05-31 | 2024-07-16 | 平安科技(深圳)有限公司 | 车辆智能定损方法、装置、设备及存储介质 |
| US20230410271A1 (en) * | 2022-06-16 | 2023-12-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Vehicle assessment systems and methods |
| CN115115611B (zh) * | 2022-07-21 | 2023-04-07 | 明觉科技(北京)有限公司 | 车辆损伤识别方法、装置、电子设备和存储介质 |
| KR102476815B1 (ko) * | 2022-09-21 | 2022-12-12 | (주)슬레이트미디어 | 인공지능 기반 스톡 이미지 자동 추출 방법, 장치 및 시스템 |
| CN115994910B (zh) * | 2023-03-24 | 2023-06-06 | 邦邦汽车销售服务(北京)有限公司 | 基于数据处理的汽车损伤程度确定方法及系统 |
| CN116703622B (zh) * | 2023-08-02 | 2023-10-03 | 凯泰铭科技(北京)有限公司 | 一种车辆损伤鉴定方法及系统 |
| CN117851940B (zh) * | 2024-03-08 | 2024-06-18 | 北京建筑大学 | 一种超声导波损伤检测方法、装置、电子设备及存储介质 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3243065B2 (ja) * | 1993-06-30 | 2002-01-07 | 株式会社東芝 | 構造部品の劣化・損傷予測装置 |
| JP2001344463A (ja) * | 2000-05-30 | 2001-12-14 | System Location Co Ltd | 車両再販価格分析システム |
| JP2002183338A (ja) * | 2000-12-14 | 2002-06-28 | Hitachi Ltd | 損害評価方法および情報処理装置ならびに記憶媒体 |
| JP2003196511A (ja) * | 2001-12-25 | 2003-07-11 | System Kobo M:Kk | 車両修理簡易見積りシステム、車両修理簡易見積りサーバおよびプログラム |
| JP2003226230A (ja) * | 2002-02-05 | 2003-08-12 | Mazda Motor Corp | 製品の修理支援装置、その方法、及び製品の修理支援用プログラムを記録した記録媒体 |
| US6826301B2 (en) * | 2002-10-07 | 2004-11-30 | Infocus Corporation | Data transmission system and method |
| IT1337796B1 (it) * | 2004-05-11 | 2007-02-20 | Fausto Siri | Procedimento per il riconoscimento, l'analisi e la valutazione delle deformazioni in particolare in automezzi |
| JP3839822B2 (ja) * | 2004-08-11 | 2006-11-01 | 株式会社損害保険ジャパン | 物流工程における物品の損傷状況分析方法、損傷状況分析システム及び記録媒体 |
| JP2006164022A (ja) * | 2004-12-09 | 2006-06-22 | Mitsubishi Electric Corp | 維持管理計画システム |
| CN1658559A (zh) * | 2005-02-22 | 2005-08-24 | 刘波 | 基于因特网的远程实时监控车辆定损系统及其监控方法 |
| JP5057183B2 (ja) * | 2010-03-31 | 2012-10-24 | アイシン・エィ・ダブリュ株式会社 | 風景マッチング用参照データ生成システム及び位置測位システム |
| CN102376071B (zh) * | 2010-08-20 | 2015-03-25 | 深圳市安致兰德科技有限公司 | 保险定损移动查勘系统 |
| WO2013093932A2 (en) * | 2011-09-29 | 2013-06-27 | Tata Consultancy Services Limited | Damage assessment of an object |
| US9002719B2 (en) * | 2012-10-08 | 2015-04-07 | State Farm Mutual Automobile Insurance Company | Device and method for building claim assessment |
| CN103310223A (zh) * | 2013-03-13 | 2013-09-18 | 四川天翼网络服务有限公司 | 一种基于图像识别的车辆定损系统及方法 |
| FR3007172B1 (fr) * | 2013-06-12 | 2020-12-18 | Renault Sas | Procede et systeme d'identification d'un degat cause a un vehicule |
| US20150287130A1 (en) * | 2014-04-04 | 2015-10-08 | Verc, Inc. | Systems and methods for assessing damage of rental vehicle |
| US20160239922A1 (en) * | 2015-02-17 | 2016-08-18 | Raymond Jimenez | System and method of real-time imaging and analysis of real-world objects |
| GB2542118B (en) * | 2015-09-04 | 2021-05-19 | Toshiba Europe Ltd | A method, apparatus, system, and computer readable medium for detecting change to a structure |
| GB201517462D0 (en) * | 2015-10-02 | 2015-11-18 | Tractable Ltd | Semi-automatic labelling of datasets |
| CN105678622A (zh) | 2016-01-07 | 2016-06-15 | 平安科技(深圳)有限公司 | 车险理赔照片的分析方法及系统 |
| CN105719188B (zh) * | 2016-01-22 | 2017-12-26 | 平安科技(深圳)有限公司 | 基于多张图片一致性实现保险理赔反欺诈的方法及服务器 |
| US11144889B2 (en) * | 2016-04-06 | 2021-10-12 | American International Group, Inc. | Automatic assessment of damage and repair costs in vehicles |
| CN105956667B (zh) * | 2016-04-14 | 2018-09-25 | 平安科技(深圳)有限公司 | 车险定损理赔审核方法及系统 |
| CN106021548A (zh) * | 2016-05-27 | 2016-10-12 | 大连楼兰科技股份有限公司 | 基于分布式人工智能图像识别的远程定损方法及系统 |
| CN106296118A (zh) * | 2016-08-03 | 2017-01-04 | 深圳市永兴元科技有限公司 | 基于图像识别的车辆定损方法及装置 |
| CN106203644A (zh) * | 2016-08-09 | 2016-12-07 | 深圳市永兴元科技有限公司 | 车辆定损方法和装置 |
| CN106372651B (zh) * | 2016-08-22 | 2018-03-06 | 平安科技(深圳)有限公司 | 图片品质的检测方法及装置 |
-
2017
- 2017-04-11 CN CN201710232956.8A patent/CN107358596B/zh active Active
-
2018
- 2018-03-05 TW TW107107229A patent/TWI684922B/zh active
- 2018-04-11 JP JP2019555669A patent/JP6874150B2/ja active Active
- 2018-04-11 WO PCT/US2018/027194 patent/WO2018191437A1/en active Search and Examination
- 2018-04-11 SG SG11201903904VA patent/SG11201903904VA/en unknown
- 2018-04-11 US US15/950,786 patent/US20180293552A1/en not_active Abandoned
- 2018-04-11 JP JP2019524075A patent/JP6873237B2/ja active Active
- 2018-04-11 KR KR1020197012676A patent/KR102151365B1/ko active IP Right Grant
- 2018-04-11 WO PCT/US2018/027192 patent/WO2018191435A1/en active Search and Examination
- 2018-04-11 MY MYPI2019005962A patent/MY193739A/en unknown
- 2018-04-11 EP EP18723105.5A patent/EP3520045B8/en active Active
-
2019
- 2019-03-19 US US16/358,581 patent/US20190213563A1/en not_active Abandoned
- 2019-04-30 PH PH12019500971A patent/PH12019500971A1/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| EP3520045B1 (en) | 2021-11-24 |
| CN107358596A (zh) | 2017-11-17 |
| WO2018191435A1 (en) | 2018-10-18 |
| KR102151365B1 (ko) | 2020-09-04 |
| JP2020517015A (ja) | 2020-06-11 |
| US20190213563A1 (en) | 2019-07-11 |
| TW201837786A (zh) | 2018-10-16 |
| US20180293552A1 (en) | 2018-10-11 |
| KR20190069457A (ko) | 2019-06-19 |
| EP3520045A1 (en) | 2019-08-07 |
| SG11201903904VA (en) | 2019-05-30 |
| JP2020504358A (ja) | 2020-02-06 |
| EP3520045B8 (en) | 2022-02-23 |
| CN107358596B (zh) | 2020-09-18 |
| MY193739A (en) | 2022-10-27 |
| PH12019500971A1 (en) | 2019-11-11 |
| WO2018191437A1 (en) | 2018-10-18 |
| JP6874150B2 (ja) | 2021-05-19 |
| TWI684922B (zh) | 2020-02-11 |
| WO2018191437A8 (en) | 2022-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6873237B2 (ja) | 画像ベースの車両損害評価方法、装置、およびシステム、ならびに電子デバイス | |
| JP7110414B2 (ja) | 画像に基づく車両損傷判定方法、装置および電子デバイス | |
| KR102418446B1 (ko) | 픽쳐 기반의 차량 손해 평가 방법 및 장치, 및 전자 디바이스 | |
| US20240087102A1 (en) | Automatic Image Based Object Damage Assessment | |
| Rahmouni et al. | Distinguishing computer graphics from natural images using convolution neural networks | |
| JP6546271B2 (ja) | 画像処理装置、物体検知装置、画像処理方法 | |
| WO2018191421A1 (en) | Image-based vehicle damage determining method, apparatus, and electronic device | |
| EP3719703A1 (en) | Vehicle damage identification processing method, processing device, client and server | |
| KR20190021187A (ko) | 딥 러닝에 기반한 차량번호판 분류 방법, 시스템, 전자장치 및 매체 | |
| US8761498B1 (en) | Face and license plate detection in street level images with 3-D road width features estimated from laser data | |
| WO2019144416A1 (zh) | 信息处理方法、系统、云处理设备以及计算机程序产品 | |
| CN114663871A (zh) | 图像识别方法、训练方法、装置、系统及存储介质 | |
| Rithik et al. | Image Based Classification for Vehicle Accident Detection and Insurance Claim Using Artificial Intelligence | |
| Sanghvi et al. | SAARTHI: Smart Auto Assessment and Roadside Technical Help Interface |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20190702 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190702 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201215 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20201228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210420 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6873237 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |