JP6848488B2 - 光干渉断層計 - Google Patents
光干渉断層計 Download PDFInfo
- Publication number
- JP6848488B2 JP6848488B2 JP2017016370A JP2017016370A JP6848488B2 JP 6848488 B2 JP6848488 B2 JP 6848488B2 JP 2017016370 A JP2017016370 A JP 2017016370A JP 2017016370 A JP2017016370 A JP 2017016370A JP 6848488 B2 JP6848488 B2 JP 6848488B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement light
- dimensional
- scan
- scanning
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012014 optical coherence tomography Methods 0.000 title description 173
- 230000003287 optical effect Effects 0.000 claims description 189
- 238000005259 measurement Methods 0.000 claims description 136
- 230000033001 locomotion Effects 0.000 claims description 93
- 238000003325 tomography Methods 0.000 claims description 5
- 238000000034 method Methods 0.000 description 57
- 238000004458 analytical method Methods 0.000 description 41
- 230000008569 process Effects 0.000 description 35
- 238000012545 processing Methods 0.000 description 34
- 230000017531 blood circulation Effects 0.000 description 33
- 102100035593 POU domain, class 2, transcription factor 1 Human genes 0.000 description 27
- 101710084414 POU domain, class 2, transcription factor 1 Proteins 0.000 description 27
- 210000004204 blood vessel Anatomy 0.000 description 22
- 239000010410 layer Substances 0.000 description 22
- 239000000835 fiber Substances 0.000 description 16
- 230000008878 coupling Effects 0.000 description 14
- 238000010168 coupling process Methods 0.000 description 14
- 238000005859 coupling reaction Methods 0.000 description 14
- 230000009466 transformation Effects 0.000 description 12
- 230000015271 coagulation Effects 0.000 description 11
- 238000005345 coagulation Methods 0.000 description 11
- 230000010363 phase shift Effects 0.000 description 11
- 230000010349 pulsation Effects 0.000 description 9
- 238000002583 angiography Methods 0.000 description 8
- 238000009826 distribution Methods 0.000 description 8
- 230000000649 photocoagulation Effects 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 7
- 230000008859 change Effects 0.000 description 7
- 238000001356 surgical procedure Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 239000013307 optical fiber Substances 0.000 description 5
- 230000003595 spectral effect Effects 0.000 description 5
- 230000000740 bleeding effect Effects 0.000 description 4
- 238000010223 real-time analysis Methods 0.000 description 4
- 210000001525 retina Anatomy 0.000 description 4
- 238000003745 diagnosis Methods 0.000 description 3
- 230000004424 eye movement Effects 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 230000010287 polarization Effects 0.000 description 3
- 230000011218 segmentation Effects 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 238000002430 laser surgery Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000002344 surface layer Substances 0.000 description 2
- 238000010408 sweeping Methods 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 208000002177 Cataract Diseases 0.000 description 1
- 208000010412 Glaucoma Diseases 0.000 description 1
- 230000005374 Kerr effect Effects 0.000 description 1
- 206010044565 Tremor Diseases 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- BJQHLKABXJIVAM-UHFFFAOYSA-N bis(2-ethylhexyl) phthalate Chemical compound CCCCC(CC)COC(=O)C1=CC=CC=C1C(=O)OCC(CC)CCCC BJQHLKABXJIVAM-UHFFFAOYSA-N 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 210000003161 choroid Anatomy 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 210000004087 cornea Anatomy 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000002091 elastography Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 210000000744 eyelid Anatomy 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 210000003733 optic disk Anatomy 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002207 retinal effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images









Landscapes
- Eye Examination Apparatus (AREA)
Description
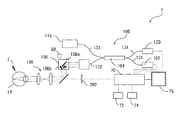
図1に例示してOCT1は、OCT光学系100と、固視光学系200と、を有する。固視光学系200は、被検眼に固視標を投影する。
次に、図1を参照して、OCT1の制御系について説明する。OCT1は、制御系として、制御部70、および、メモリ(記憶部)71を主に有する。
以上のような構成を持つ装置の動作について、以下説明する。
例えば、制御部70は、検出器120から出力される信号に基づくAスキャンデータ(1次元OCTデータの一例)を、少なくとも300キロヘルツ以上の周期で取得する。なお、本実施形態において、1周期分のAスキャンデータは、眼底上の1点における深さ方向(光軸方向)の組織の情報である。Aスキャンデータは、検出器120から出力される信号(OCT信号)をフーリエ変換することで得られる複素OCT信号であってもよい。また、複素OCT信号が更に処理されて得られる深さプロファイルであってもよい。
制御部70は、随時生成される3次元OCTデータを視覚化したグラフィックを、モニタ75において更新しながら表示させる。本実施形態では、新たな3次元OCTデータが取得される都度、制御部70は、モニタ75に表示させるグラフィックを、その新たな3次元OCTデータを視覚化したグラフィックへと更新する。つまり、本実施形態では、モニタ75には、被検眼Eの組織(例えば、眼底の3次元組織)をリアルタイムに示す動画像が表示される。その結果として、リアルタイムな眼底における組織の動態が、動画像を介して観察可能となる。
なお、3次元OCTデータを視覚化したグラフィックは、例えば、図3に示すような、3次元画像であってもよい。3次元画像は、例えば、各スキャンラインにおける2次元的な反射強度分布(例えば、断層画像)が副走査方向(スキャンラインと交差する方向)に関して並べられた画像であってもよい。つまり、3次元的な反射強度分布を示す画像であってもよい(便宜上、このような画像を、3次元OCT画像と称す)。また、3次元画像は、3次元モーションコントラスト画像であってもよい。なお、モーションコントラストとは、例えば、被検体(被検眼)の動き、時間的な変化などの検出情報である。例えば、フロー画像等もモーションコントラストの一種とする。なお、フロー画像は、例えば、流体等の動き等を検出し、画像化したものである。血液の動きを検出して得られた血管位置を造影した血管造影画像(OCTアンジオグラフィー)等は、モーションコントラストの一種と言える。3次元モーションコントラスト画像を取得する処理の具体例は、後述する。
また、3次元OCTデータを視覚化したグラフィックは、断層画像であってもよい。例えば、3次元OCTデータの取得範囲における任意の断面での信号強度分布に基づく2次元的な画像が、制御部70によって断層画像として生成されてもよい。このような断層画像は、例えば、あるスキャンラインにおける断面を示すものに限られるものではない。例えば、複数のスキャンラインを斜めに横切る断面を示す画像が、断層画像として制御部70によって形成されてもよい。また、断層画像に係る断面は、平面および曲面のいずれであってもよい。なお、断層画像は、モーションコントラスト画像であってもよい。
また、3次元OCTデータを視覚化したグラフィックは、例えば、3次元OCTデータに基づく正面画像であってもよい。3次元OCTデータに基づく正面画像は、例えば、3次元OCTデータの各XY位置において、深さ方向の信号強度分布をZ方向に積算することによって得られる(いわゆる積算画像)。もちろん、正面画像は、積算処理とは異なる処理によって取得されてもよい。例えば、3次元OCTデータにおける深さ方向に関する一部のデータ,に基づいて、正面画像が取得されてもよい。このような正面画像は、例えば、眼底を構成する一部の層に関する正面像であってもよいし、(例えば、図4に示す網膜表層でもよいし、表層以外の特定の層であってもよい)、または、一定の深さでの正面像(例えば、一定の深さ位置での信号強度分布を示すCスキャン画像等)であってもよい。なお、一部の層に関する正面像が取得される場合、制御部30は、3次元OCTデータに対してセグメンテーション処理を行い、層毎の境界を特定する。そして、セグメンテーション処理で特定された境界部分の情報に基づいて、正面画像が形成される。
本実施形態では、3次元OCTデータに対する各種処理(例えば、解析処理、および、画像処理等)についても、制御部70によって行われる。例えば、制御部70は、随時生成される各々の3次元OCTデータに対して解析処理が行われる。その結果として、制御部70は、随時生成される3次元OCTデータのリアルタイムな解析結果を出力する。ここでいう『出力』は、例えば、モニタ75への表示出力であってもよい。また、OCT1による撮影と並行して動作する眼科用手術装置(例えば、眼科用手術ロボット、眼科用レーザー手術装置、および、眼科用レーザー光凝固装置等)への出力であってもよい。制御部70から出力される解析結果が、眼科手術装置の動作を制御するための信号として利用されてもよい(詳細は後述する)。まずは、主に解析結果が、モニタ75へ表示出力される場合を説明する。
この処理結果として、被検眼Eの3次元モーションコントラストデータが取得されてもよい。そして、例えば、3次元モーションコントラストデータを視覚化したグラフィックであるモーションコントラスト画像による動画像が、解析処理の処理結果としてモニタ75上に表示されてもよい。
また、3次元OCTデータに対する解析処理では、血流の脈動に関する解析処理が実行されてもよい。例えば、3次元モーションコントラスト画像を制御部70が更に処理することによって、血流の脈動に関する情報を、解析処理の処理結果として取得してもよい。血流の脈動に関する情報の具体例としては、例えば、血流の向き、血流の速度,血流の流量,血流による圧力,および,脈拍のうち少なくともいずれかを示す情報であってもよく、また、これらのいずれかを時系列で示す情報であってもよい。
本実施形態においては、3次元のモーションコントラスト画像から得られる血管の3次元構造と、複数回のラスタースキャンによって得られる3次元OCTデータと、を用いて、血流の絶対速度を求めてもよい。
以上、随時取得される3次元OCTデータに対して行われる解析処理として、少なくとも2つの(換言すれば、少なくとも2フレーム分の)3次元OCTデータを用いて処理が行われる場合の具体例を示したが、必ずしもこれに限られるものではない。例えば、時系列の3次元OCTデータを、フレーム毎に処理するような解析処理が行われてもよい。
例えば、制御部70によって、被検眼Eの組織における厚みに関する解析処理が行われてもよい。制御部70は、随時生成される3次元OCTデータに基づいて被検眼Eの組織における厚みを解析する。そして、解析結果として、厚みに関する情報を出力してもよい。組織の厚みは、例えば、眼底における層厚であってもよいし、前眼部の組織における厚みであってもよい。解析処理によって各位置における厚みが求められ、解析結果として、被検眼の組織における厚みの2次元的な分布をリアルタイムに示すマップが得られてもよい。マップは、モニタ75に表示されてもよい。リアルタイムな厚みマップは、例えば、被検眼Eに圧力を加えたり、屈折矯正手術,白内障手術等の組織の厚みに影響を及ぼす手術が行われたりする場合に、それらの作業による厚みの変化を検者がリアルタイムに観察する場合等に利用されてもよい。ここでいう手術は、眼科用レーザー手術装置を用いた手術であってもよく、この場合、OCT1は、被検眼Eに対して圧力を付与する眼圧計(例えば、トノメータ)、或いは、眼科用レーザー手術装置を備えてもよい。そして、OCT1において連続して3次元OCTデータが取得される間に、圧力付与やレーザーの照射が行われるよう、各装置が制御されてもよい。また、制御部70は、眼科用レーザー手術装置におけるレーザーの照射を制御するために、厚みに関する解析結果を眼科用レーザー手術装置に対して出力してもよい。
また、制御部70は、被検眼において形成された光凝固レーザーの凝固斑を、随時生成される3次元OCTデータに基づいて解析し、凝固斑のサイズ情報,および,被検眼Eにおける凝固斑の位置情報,のうち少なくともいずれかを、リアルタイムな解析結果として出力してもよい。凝固斑は、例えば、リアルタイムに取得される3次元OCTデータが視覚化されたグラフィック(3次元画像でもよいし、ある断面を示す2次元画像でもよい)において、周囲の組織に対し輝度の異なる領域として示されるので、グラフィックへの画像処理によって検出可能である。また、検出される凝固斑のサイズ情報、および、検出される凝固斑の被検眼Eにおける位置情報のうち、少なくともいずれかが、グラフィックに対する画像処理により特定できる。サイズ情報としては、凝固斑の半径,深さ方向の長さ,体積,および,容積等の少なくともいずれかに関する情報であってもよい。また、位置情報としては、被検眼Eにおける凝固斑の形成位置を特定するための情報であればよく、例えば、座標情報等の数値情報であってもよい。また、位置情報は、画像情報であってもよく、例えば、3次元OCTデータを視覚化したグラフィックであって、更に、凝固斑の形成位置が強調されたグラフィックであってもよい。これらの情報が、解析結果としてリアルタイムに出力される。
また、例えば、制御部70によって、被検眼Eの眼底における層の剥離に関する解析処理がリアルタイムに行われてもよい。この解析処理では、データの取得範囲に眼底を含む3次元OCTデータが、解析対象としてOCT1によって取得されることを前提とする。そして、眼底を構成する層同士の剥離箇所が、随時生成される3次元OCTデータに基づいて解析され、その結果(解析結果)として、層同士の剥離箇所の有無,および,剥離箇所の位置,のうち少なくともいずれかを示す情報(剥離箇所情報という)が出力されてもよい。剥離箇所情報をリアルタイムに得ることは、例えば、硝子体手術等において有用である。なお、剥離箇所の位置を示す情報としては、xy方向,および,深さ方向,のうち一方または両方に関して剥離箇所を特定するための情報である。深さ方向に関して剥離箇所を特定するための情報としては、深さ方向における剥離箇所の位置を示す数値情報であってもよいし、互いに剥離された2つの層のうち少なくとも一方を特定する情報であてもよい。硝子体手術に適用される場合、上記の解析処理は、少なくとも内境界膜(ILM)の剥離状況を、リアルタイムな解析結果として得るものであってもよい。
また、例えば、制御部70は、被検眼Eの診断,治療,または,手術に用いられる器具と、被検眼Eの組織との深さ方向に関する間隔を、随時生成される前記3次元OCTデータに基づいて解析し、器具と被検眼Eの組織との間隔に関する情報を、リアルタイムな解析結果として出力してもよい。この解析処理では、データの取得範囲に被検眼Eの組織と共に,上記器具が含まれる3次元OCTデータが、解析対象としてOCT1によって取得されることを前提とする。
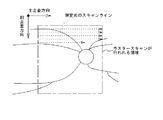
上記実施形態の説明では、図1における主走査用の光スキャナ108aとしてレゾナントスキャナを利用し、レゾナントスキャナの往路動による測定光の走査と、復路動による測定光の走査と、を交互に行う場合を、主な実施例として説明した(図2参照)。しかし、上述の通り、本開示にかかる主走査用の光スキャナには、レゾナントスキャナ以外の種々の光スキャナを適用可能である。例えば、後述の具体例のように、1つ、または、複数のガルバノミラーが、主走査用の光スキャナとして利用されてもよい。ガルバノミラーは、制御性およびスキャンパターンの自由度が高いという特徴があり、スキャン速度についても制御によって変更できる。また、ガルバノミラーは、比較的安価に入手できる。
ここで、主走査用の光スキャナとしてガルバノミラーが1つだけ設けられている具体例を説明する。 この具体例では、主走査用の光スキャナであるガルバノミラーの往復動作のうち、往路動のみに基づいてOCTデータを取得する。
つまり、非特許文献と比較して、ガルバノミラーをより簡単に制御ながら、より高速に、OCTアンジオグラフィーを得るための走査が実現される。
また、例えば、各回のスキャンにおける眼の動きの影響が抑制される。固視微動等の眼の動きは、周期の短い成分ほど、振幅(眼の動きの量)が小さくなる傾向がある。例えば、下記の非特許文献2によると、10Hz以上の領域において、振幅は、0.5arcmin(眼底2.5マイクロメートル以下)まで低減する。1つのスキャンラインに対する1回の走査が、ガルバノミラーの往路動に基づいて1ミリ秒から4ミリ秒程度の時間で実行されるので、目標とするスキャンライン上で、測定光が精度よく走査されやすい。
また、刺激に対する応答や、拍動による組織変化を見るうえでも、各回の走査の開始タイミングにおける時間差が短いことが望ましいと考えられる。例えば、OCE(Optical Coherence Elastography)が知られており、エア・パフによる刺激に基づく組織の変形を観察する検査がある。例えば、前眼部の場合、変形は数ミリ秒の内に起こり、弾性波は広範囲に広がってしまう。例えば、撮影装置1が、前眼部OCTとして適用される場合において、各回の走査に要する時間が、1ミリ秒から3ミリ秒程度の範囲に設定されていれば、変形を観察するうえで、十分なスキャン範囲で、且つ、時間間隔で、前眼部のOCTデータを得ることができると考えられる。
例えば、制御部70は、1回の往路動の時間が3ミリ秒以下となるように、ガルバノミラーの駆動制御を行ってもよい。例えば、300キロヘルツ以上の周期で、Aスキャンデータを取得する場合において、1回あたりの往路動の時間が3ミリ秒以下に設定されていることにより、1秒あたり、300本以上のスキャンラインに対し、測定光が走査される。このとき、ガルバノミラーにおける1回の往路動が、2ミリ秒以上3ミリ秒以下の範囲で行われるように、ガルバノミラーの駆動制御が行われることが好ましい。この場合、各Aスキャンを、所期する位置に良好な精度で行うことが可能となる。
主走査用の光スキャナとしてガルバノミラーが複数個設けられている場合、主走査に用いられる各々のガルバノミラーの偏向方向は、互いに共通してもよい。また、各々のガルバノミラーは、分岐の無い光路上に配置されてもよいし(直列配置)、分岐した複数の光路上にそれぞれ配置されていてもよい(並列配置)。また、主走査用の光スキャナとして、3つ以上のガルバノミラーが適用される場合、直列配置と並列配置とを組み合わせたものであってもよい。
まず、図8に示した変容例について説明する。図8の変容例において、OCT光学系100は、2軸による光走査を、光スキャナ208によって行う。また、変容例におけるOCT光学系100には、光スイッチ210(「光選択部」の一例)が設けられている。図8において、光スイッチ210は、ファイバ132の出射端から光スキャナ208の間に配置されている。また、光スキャナ208を経た測定光は、図1の実施例と同様、対物光学系106を経由して、被検眼Eへ照射される。
次に、図11の変容例について説明する。図11の変容例において、OCT光学系100は、2軸による光走査を、光スキャナ308によって行う。光スキャナ308は、2つのガルバノミラー308a1,308a2を、主走査用の光スキャナとして有する。また、副走査のために、光スキャナ308には、光スキャナ308bが設けられている。図11において、ガルバノミラー308a1,308a2は、副走査用の光スキャナ308bよりも、被検眼E側に配置されている。
70 制御部
75 モニタ
100 干渉光学系
102 光源
108,208 走査部
120 検出器
E 被検眼
Claims (1)
- 光源からの測定光を被検眼の組織へ照射し、参照光と前記組織で反射された前記測定光との干渉を検出器で検出するOCT光学系と、
往路動と復路動とからなる往復駆動を行い被検眼上で前記測定光を所定の主走査方向へ走査する、第1ガルバノミラーおよび第2ガルバノミラーとを、主走査用光スキャナとして有し、更に、前記主走査用光スキャナとは走査方向が異なる副走査用光スキャナを有し、前記主走査用光スキャナと前記副走査用光スキャナとの動作に基づいて前記測定光を前記被検眼上で2次元的にスキャンするための走査部と、
前記検出器から出力される信号に基づくAスキャンデータを、少なくとも300キロヘルツ以上の周期で取得する制御手段と、を有し、
前記制御手段は、前記第1ガルバノミラーと前記第2ガルバノミラーとを組み合わせて駆動させることにより、前記第1ガルバノミラーを介した測定光である第1測定光と、前記第2ガルバノミラーを介した測定光である第2測定光と、を被検眼上で互いに独立に主走査方向へ走査すると共に、
前記第1ガルバノミラーと前記第2ガルバノミラーとを一定の振り角で繰り返し往復させることにより主走査方向に関して測定光の走査を連続的に2回以上実行させ、且つ、各回の走査の開始タイミングにおける時間差が5ミリ秒以下の値となるように、前記第1ガルバノミラーと前記第2ガルバノミラーとを制御する、光干渉断層計。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017016370A JP6848488B2 (ja) | 2017-01-31 | 2017-01-31 | 光干渉断層計 |
| US15/422,866 US10238281B2 (en) | 2016-02-03 | 2017-02-02 | Optical coherence tomography device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017016370A JP6848488B2 (ja) | 2017-01-31 | 2017-01-31 | 光干渉断層計 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018121888A JP2018121888A (ja) | 2018-08-09 |
| JP2018121888A5 JP2018121888A5 (ja) | 2020-02-13 |
| JP6848488B2 true JP6848488B2 (ja) | 2021-03-24 |
Family
ID=63109100
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017016370A Active JP6848488B2 (ja) | 2016-02-03 | 2017-01-31 | 光干渉断層計 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6848488B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7216514B2 (ja) * | 2018-09-28 | 2023-02-01 | 株式会社トプコン | 血管解析装置 |
| CN113227761B (zh) | 2018-12-20 | 2024-07-02 | 日本电气株式会社 | 光学相干断层扫描设备 |
| JP7332131B2 (ja) * | 2019-03-27 | 2023-08-23 | 株式会社トーメーコーポレーション | 光断層画像撮影装置 |
| JP7260426B2 (ja) | 2019-07-11 | 2023-04-18 | 株式会社トプコン | 光コヒーレンストモグラフィ装置、その制御方法、光計測方法、プログラム、及び記憶媒体 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012156187A (ja) * | 2011-01-24 | 2012-08-16 | Canon Inc | 光源装置及びこれを用いた撮像装置 |
| JP5787063B2 (ja) * | 2011-03-31 | 2015-09-30 | 株式会社ニデック | 眼科撮影装置 |
| JP5975522B2 (ja) * | 2012-12-07 | 2016-08-23 | 日本電信電話株式会社 | 動的焦点移動型光干渉断層顕微鏡 |
| US20150371401A1 (en) * | 2013-03-13 | 2015-12-24 | University Of Washington | Methods and Systems for Imaging Tissue Motion Using Optical Coherence Tomography |
| EP3097382B1 (en) * | 2014-01-21 | 2022-10-12 | Santec Corporation | Optical coherence tomography system with multiple sample paths |
| JP2016002382A (ja) * | 2014-06-18 | 2016-01-12 | キヤノン株式会社 | 撮像装置 |
| JP6535985B2 (ja) * | 2014-06-30 | 2019-07-03 | 株式会社ニデック | 光コヒーレンストモグラフィ装置、光コヒーレンストモグラフィ演算方法及び光コヒーレンストモグラフィ演算プログラム |
| JP6598503B2 (ja) * | 2015-05-01 | 2019-10-30 | キヤノン株式会社 | 画像生成装置、画像生成方法及びプログラム |
-
2017
- 2017-01-31 JP JP2017016370A patent/JP6848488B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018121888A (ja) | 2018-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10238281B2 (en) | Optical coherence tomography device | |
| US10791922B2 (en) | Ophthalmological device and ophthalmological inspection system | |
| JP6616704B2 (ja) | 眼科装置及び眼科検査システム | |
| JP6880550B2 (ja) | 光干渉断層計 | |
| JP6848488B2 (ja) | 光干渉断層計 | |
| US9918628B2 (en) | Accommodation function evaluation apparatus | |
| JP5378157B2 (ja) | 眼科観察装置 | |
| WO2020044712A1 (ja) | 眼科装置、及びその制御方法 | |
| US20240130612A1 (en) | Ophthalmologic information processing apparatus, ophthalmologic apparatus, ophthalmologic information processing method, and recording medium | |
| JP2018047099A (ja) | Oct装置 | |
| JP2022189969A (ja) | 眼科装置、及び眼科情報処理装置 | |
| EP3607871B1 (en) | Ophthalmologic apparatus and method of controlling the same | |
| JP7162553B2 (ja) | 眼科情報処理装置、眼科装置、眼科情報処理方法、及びプログラム | |
| JP7141279B2 (ja) | 眼科情報処理装置、眼科装置、及び眼科情報処理方法 | |
| JP2023002745A (ja) | 眼科装置 | |
| US11298019B2 (en) | Ophthalmologic apparatus and method for controlling the same | |
| JP7289394B2 (ja) | 眼科情報処理装置、眼科装置、眼科情報処理方法、及びプログラム | |
| JP7231405B2 (ja) | 眼科装置、及びその制御方法 | |
| JP7166184B2 (ja) | 眼科情報処理装置、眼科装置、眼科情報処理方法、及びプログラム | |
| JP6654657B2 (ja) | 調節機能評価装置 | |
| JP7202819B2 (ja) | 眼科装置、及びその制御方法 | |
| JP7288276B2 (ja) | 眼科装置、及びその制御方法 | |
| WO2023042577A1 (ja) | 眼科情報処理装置、眼科装置、眼科情報処理方法、及びプログラム | |
| JP7103813B2 (ja) | 眼科装置 | |
| JP7244211B2 (ja) | 眼科装置、及び眼科装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191224 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6848488 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |