JP6830387B2 - 担持量測定装置および担持量測定方法 - Google Patents
担持量測定装置および担持量測定方法 Download PDFInfo
- Publication number
- JP6830387B2 JP6830387B2 JP2017062158A JP2017062158A JP6830387B2 JP 6830387 B2 JP6830387 B2 JP 6830387B2 JP 2017062158 A JP2017062158 A JP 2017062158A JP 2017062158 A JP2017062158 A JP 2017062158A JP 6830387 B2 JP6830387 B2 JP 6830387B2
- Authority
- JP
- Japan
- Prior art keywords
- base material
- electromagnetic wave
- detection elements
- amount measuring
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 19
- 239000000463 material Substances 0.000 claims description 196
- 238000001514 detection method Methods 0.000 claims description 123
- 239000003054 catalyst Substances 0.000 claims description 101
- 230000005684 electric field Effects 0.000 claims description 35
- 229910052751 metal Inorganic materials 0.000 claims description 27
- 239000002184 metal Substances 0.000 claims description 27
- 238000011144 upstream manufacturing Methods 0.000 claims description 11
- 230000008569 process Effects 0.000 claims description 8
- 238000004804 winding Methods 0.000 claims description 7
- 239000000758 substrate Substances 0.000 claims description 5
- 238000000576 coating method Methods 0.000 description 60
- 239000011248 coating agent Substances 0.000 description 59
- 230000005540 biological transmission Effects 0.000 description 20
- 238000002834 transmittance Methods 0.000 description 18
- 238000005259 measurement Methods 0.000 description 16
- 239000007788 liquid Substances 0.000 description 14
- 230000037303 wrinkles Effects 0.000 description 14
- 238000012937 correction Methods 0.000 description 13
- 238000001035 drying Methods 0.000 description 10
- 230000005856 abnormality Effects 0.000 description 8
- 238000003860 storage Methods 0.000 description 7
- 238000012546 transfer Methods 0.000 description 7
- 238000009826 distribution Methods 0.000 description 6
- 239000000446 fuel Substances 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 4
- 239000005518 polymer electrolyte Substances 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000003792 electrolyte Substances 0.000 description 3
- 230000005672 electromagnetic field Effects 0.000 description 3
- 230000007613 environmental effect Effects 0.000 description 3
- 239000012528 membrane Substances 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 239000001257 hydrogen Substances 0.000 description 2
- 229910052739 hydrogen Inorganic materials 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000004080 punching Methods 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000011895 specific detection Methods 0.000 description 2
- NWUYHJFMYQTDRP-UHFFFAOYSA-N 1,2-bis(ethenyl)benzene;1-ethenyl-2-ethylbenzene;styrene Chemical compound C=CC1=CC=CC=C1.CCC1=CC=CC=C1C=C.C=CC1=CC=CC=C1C=C NWUYHJFMYQTDRP-UHFFFAOYSA-N 0.000 description 1
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 1
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000004308 accommodation Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000011088 calibration curve Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000003487 electrochemical reaction Methods 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 229910052731 fluorine Inorganic materials 0.000 description 1
- 239000011737 fluorine Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 239000003456 ion exchange resin Substances 0.000 description 1
- 229920003303 ion-exchange polymer Polymers 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000007800 oxidant agent Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 239000013074 reference sample Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/30—Hydrogen technology
- Y02E60/50—Fuel cells
Landscapes
- Fuel Cell (AREA)
- Catalysts (AREA)
- Inert Electrodes (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
Description
<塗工システム10の構成>
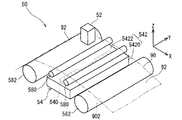
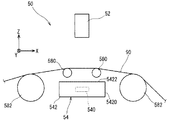
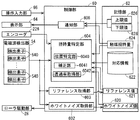
図1は、第1実施形態の塗工システム10の構成を示す概略側面図である。図2は、第1実施形態の担持量測定部50を示す概略斜視図である。図3は、第1実施形態の電磁波検出器54を示す概略側面図である。図4は、第1実施形態の担持量測定部50を示す概略斜視図である。図5は、第1実施形態の担持量測定部50を示す概略側面図である。図6は、第1実施形態の担持量測定部50を示す概略正面図である。図7は、実施形態の塗工システム10に係るバス配線を示す図である。
搬送部20は、供給用ローラ220、巻取用ローラ222および搬送補助ローラ240、搬送用ローラ260,262,264を備える。また、搬送部20は、巻取用ローラ222を回転させるローラ駆動部28を備える。これらのローラ各々は、Y軸方向に延びる円筒状に形成されている。
塗工部30は、スリットノズル32および塗工液供給部34を備える。スリットノズル32の下端部には、基材90の幅方向(Y軸方向)に沿って延びるスリット状に形成された吐出口が形成されている。塗工液供給部34は、金属触媒の塗工液を貯留するタンク340、そのタンク340から塗工液をスリットノズル32に供給するポンプ342、吐出口からの塗工液の吐出の開始および停止を実行する電磁弁344を備える。この電磁弁344の動作は制御部60によって制御される。
乾燥部40は、基材90が進入する進入口および基材90が退出する退出口が両端に形成された筐体を有する。乾燥部40は、その筐体の内部にて、基材90の片面に塗布された塗工液の膜の乾燥処理を行う。一例として、乾燥部40は、基材90に向けて熱風を供給することによってその基材90を加熱し、これによって、塗工液に含まれる水分などの溶媒を蒸発させる。
担持量測定部50は、乾燥部40の下流側に設けられており、基材90に形成された触媒層92における金属触媒の担持量(触媒担持量)を測定する。担持量測定部50は、電磁波発振器52と、電磁波検出器54とを備える。
制御部60は、塗工システム10全体の動作を制御する。制御部60のハードウェアとしての構成は、一般的なコンピュータと同様である。すなわち、制御部60は、各種演算処理を行うCPU、基本プログラムを記憶する読み出し専用のメモリであるROM、各種情報を記憶する読み書き自在のメモリであるRAMを備える。制御部60は、制御用アプリケーションまたは各種データを記憶する記憶部62に接続されている。
次に、担持量測定の流れについて説明する。図8は、第1実施形態の担持量測定の流れを示すフロー図である。図8に示すステップS10〜S17は、特に断らない限り、制御部60が塗工システム10の各要素の動作を制御することによって行われるものとする。
測定を終了すると判定された場合(YESの場合)、次のステップS17において、触媒担持量の測定結果が外部に通知される(ステップS17)。具体的には、二次元画像または三次元画像として表現された触媒担持量分布画像が表示部64に表示される。また、ローラ駆動部28による巻取用ローラ222の回転が停止されることによって、基材90の搬送が停止される。
本実施形態では、図3に示すように、筐体542のカバー部5422の+Z側に配設された一対の当接ローラ580,580が基材90の裏面に当接する。このため、当接ローラ580,580間に掛け渡された基材90が振動することを抑制し得る。これによって、電磁波発振器52、触媒層92および各検出素子540の位置関係が安定化され得るため、触媒層92に含まれる金属触媒の担持量を精度良く特定し得る。
次に、第2実施形態について説明する。なお、以降の説明において、既に説明した要素と同様の機能を有する要素については、同じ符号またはアルファベット文字を追加した符号を付して、詳細な説明を省略する場合がある。
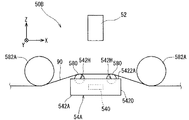
図10は、第3実施形態の担持量測定部50Bを示す概略側面図である。図11は、第3実施形態の電磁波検出器54Aを示す概略斜視図である。第3実施形態の担持量測定部50Bは、電磁波検出器54の代わりに電磁波検出器54Aを備える点で、第2実施形態の担持量測定部50Aと主に相違する。
以上、実施形態について説明してきたが、本発明は上記のようなものに限定されるものではなく、様々な変形が可能である。
20 搬送部
220 供給用ローラ
222 巻取用ローラ
28 ローラ駆動部
50,50A,50B 担持量測定部
52 電磁波発振器
54,54A 電磁波検出器
540 検出素子
542,542A 筐体
542H 貫通孔
5420 収容部
5422,5422A カバー部
544 窓部
580 当接ローラ
582,582A 補助ローラ
60 制御部
604 担持量特定部
62 記憶部
90 基材
92 触媒層
900 塗工領域
LP1 透過位置
Claims (7)
- シート状の基材の表面に形成された触媒層に含まれる金属触媒の担持量を測定する担持量測定装置であって、
前記基材が巻回された供給用ローラ、および、前記供給用ローラから供給される前記基材を巻き取る巻取用ローラを含む搬送部と、
前記搬送部によって前記基材が所定の搬送方向に搬送される前記基材の一方側から、前記基材に向けて前記搬送方向に直交する前記基材の幅方向に広がる扇状の電磁波を出力する電磁波発振器と、
前記基材よりも他方側において前記幅方向に配列されており、入射する前記電磁波の電界強度を検出する複数の検出素子と、
前記基材と前記複数の検出素子との間に配設され、前記複数の検出素子の前記一方側を覆うカバー部と、
前記カバー部よりも前記一方側であって、かつ、前記複数の検出素子の前記搬送方向の上流側および下流側の各々に配設され、前記基材の他方側の面に当接する一対の当接部と、
前記複数の検出素子が検出する前記電磁波の電界強度に基づき、前記触媒層の触媒担持量を特定する担持量特定部と、
を備える、担持量測定装置。 - 請求項1の担持量測定装置であって、
前記一対の当接部よりも前記搬送方向の上流側および下流側の各々に配設され、前記幅方向に延びる一対の補助ローラ部材、
をさらに備え、
前記一対の当接部が前記一対の補助ローラ部材よりも前記一方側の位置で前記基材に当接する、担持量測定装置。 - 請求項1または請求項2の担持量測定装置であって、
前記一対の補助ローラ部材が、前記基材の前記一方側の面に当接する、担持量測定装置。 - 請求項1から請求項3のいずれか1項の担持量測定装置であって、
前記一対の当接部各々は、前記幅方向に延びる軸まわりに回転する当接ローラ部材を含む、担持量測定装置。 - 請求項4の担持量測定装置であって、
前記当接ローラ部材のうち少なくとも一部が、前記カバー部に形成された貫通孔から前記一方側に露出するように配設されている、担持量測定装置。 - 請求項1から請求項5のいずれか1項の担持量測定装置であって、
前記カバー部が、前記複数の検出素子が収容される筐体の一部を構成する、担持量測定装置。 - シート状の基材の表面に形成された触媒層に含まれる金属触媒の担持量を測定する担持量測定方法であって、
(a)前記基材が巻回された供給用ローラから供給される前記基材を巻取用ローラに巻き取ることによって前記基材を搬送する工程と、
(b)前記基材の一方側に配設された電磁波発振器から、前記(a)工程にて所定の搬送方向に搬送される前記基材に向けて、前記搬送方向に直交する前記基材の幅方向に広がる扇状の電磁波を出力する工程と、
(c)前記(b)工程にて前記電磁波発振器から出力された前記電磁波の電界強度を、前記基材の他方側において前記幅方向に配列された複数の検出素子によって検出する工程と、
(d)前記(c)工程にて前記複数の検出素子が検出する前記電磁波の電界強度に基づき、前記触媒層の触媒担持量を特定する工程と、
を含み、
前記複数の検出素子の前記一方側は、前記基材と前記複数の検出素子との間に配設されたカバー部に覆われており、
前記(a)工程は、前記カバー部よりも前記一方側であって、かつ、前記複数の検出素子の前記搬送方向の上流側および下流側の各々に配設された一対の当接部を、前記基材の他方側の面に当接させる工程を含む、担持量測定方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062158A JP6830387B2 (ja) | 2017-03-28 | 2017-03-28 | 担持量測定装置および担持量測定方法 |
| CN201880015134.7A CN110537276B (zh) | 2017-03-28 | 2018-01-15 | 承载量测定装置以及承载量测定方法 |
| PCT/JP2018/000843 WO2018179684A1 (ja) | 2017-03-28 | 2018-01-15 | 担持量測定装置および担持量測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062158A JP6830387B2 (ja) | 2017-03-28 | 2017-03-28 | 担持量測定装置および担持量測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018166027A JP2018166027A (ja) | 2018-10-25 |
| JP6830387B2 true JP6830387B2 (ja) | 2021-02-17 |
Family
ID=63922158
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017062158A Active JP6830387B2 (ja) | 2017-03-28 | 2017-03-28 | 担持量測定装置および担持量測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6830387B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020036790A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社三洋物産 | 遊技機 |
| JP2020036791A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社三洋物産 | 遊技機 |
| JP2020036793A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社三洋物産 | 遊技機 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6502698B2 (ja) * | 2015-02-19 | 2019-04-17 | 株式会社Screenホールディングス | 測定装置および測定方法 |
| JP6824665B2 (ja) * | 2016-08-26 | 2021-02-03 | 株式会社Screenホールディングス | 触媒担持量測定装置、塗工システムおよび触媒担持量測定方法 |
-
2017
- 2017-03-28 JP JP2017062158A patent/JP6830387B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018166027A (ja) | 2018-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6830387B2 (ja) | 担持量測定装置および担持量測定方法 | |
| JP6824665B2 (ja) | 触媒担持量測定装置、塗工システムおよび触媒担持量測定方法 | |
| KR102115991B1 (ko) | 롤 프레스기 및 롤 프레스기에 의한 롤 프레스 방법 | |
| JP6502698B2 (ja) | 測定装置および測定方法 | |
| CN108886151A (zh) | 涂膜检查装置、涂膜检查方法及膜-触媒层接合体的制造装置 | |
| US9001966B2 (en) | Transmission X-ray analyzer | |
| US10476083B2 (en) | Electrode manufacturing method | |
| EP3597310A1 (en) | Coating device and coating method | |
| JP2017226510A (ja) | 巻取装置および巻取方法 | |
| JP2016065649A (ja) | 乾燥装置、塗工膜形成装置、および乾燥方法 | |
| JP2019060829A (ja) | テラヘルツ波透過測定システムおよびテラヘルツ波透過測定方法 | |
| JP2011202248A (ja) | 成膜装置および成膜方法 | |
| US12487160B2 (en) | Surface density measurement method, surface density measurement system, and computer device | |
| JP6447201B2 (ja) | 蓄電装置用の電極の検査方法 | |
| US20230330957A1 (en) | Detection device and electrode plate calendering apparatus | |
| WO2019187379A1 (ja) | 電磁波透過測定装置および電磁波透過測定方法 | |
| JP6210001B2 (ja) | ロールプレス装置 | |
| KR102221782B1 (ko) | 결함 검사 장치 | |
| JP6830389B2 (ja) | 担持量測定装置および担持量測定方法 | |
| KR102507387B1 (ko) | 양면 동시 코팅이 가능한 막-전극 접합체 제조장치 및 제조방법 | |
| JP2012172983A (ja) | 枚葉フィルム検査装置 | |
| CN110537276B (zh) | 承载量测定装置以及承载量测定方法 | |
| KR102458564B1 (ko) | 막-전극 접합체 제조장치 및 제조방법 | |
| KR20220057710A (ko) | 광학 검사 모듈이 구비된 롤투롤 진공 증착 장치 | |
| JP2019168385A (ja) | 電磁波透過測定装置および電磁波透過測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191223 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6830387 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |