JP6824125B2 - 医用撮像装置及び画像処理方法 - Google Patents
医用撮像装置及び画像処理方法 Download PDFInfo
- Publication number
- JP6824125B2 JP6824125B2 JP2017146782A JP2017146782A JP6824125B2 JP 6824125 B2 JP6824125 B2 JP 6824125B2 JP 2017146782 A JP2017146782 A JP 2017146782A JP 2017146782 A JP2017146782 A JP 2017146782A JP 6824125 B2 JP6824125 B2 JP 6824125B2
- Authority
- JP
- Japan
- Prior art keywords
- cross
- section
- unit
- model
- imaging device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002059 diagnostic imaging Methods 0.000 title claims description 39
- 238000003672 processing method Methods 0.000 title claims description 9
- 238000012545 processing Methods 0.000 claims description 71
- 238000000605 extraction Methods 0.000 claims description 61
- 238000003384 imaging method Methods 0.000 claims description 45
- 238000000034 method Methods 0.000 claims description 29
- 230000008569 process Effects 0.000 claims description 18
- 239000000523 sample Substances 0.000 claims description 10
- 230000002123 temporal effect Effects 0.000 claims description 6
- 239000000284 extract Substances 0.000 claims description 5
- 238000005259 measurement Methods 0.000 description 101
- 230000001605 fetal effect Effects 0.000 description 16
- 230000006870 function Effects 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000010801 machine learning Methods 0.000 description 8
- 230000004927 fusion Effects 0.000 description 7
- 238000012549 training Methods 0.000 description 7
- 210000000689 upper leg Anatomy 0.000 description 7
- 238000013459 approach Methods 0.000 description 6
- 238000013527 convolutional neural network Methods 0.000 description 6
- 230000009467 reduction Effects 0.000 description 6
- 210000001015 abdomen Anatomy 0.000 description 5
- 230000003187 abdominal effect Effects 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 5
- 238000013135 deep learning Methods 0.000 description 5
- 238000007689 inspection Methods 0.000 description 5
- 230000037396 body weight Effects 0.000 description 4
- 238000003745 diagnosis Methods 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 201000010099 disease Diseases 0.000 description 3
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000000691 measurement method Methods 0.000 description 3
- 210000000056 organ Anatomy 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 241001494479 Pecora Species 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 230000012010 growth Effects 0.000 description 2
- 210000002414 leg Anatomy 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000000877 morphologic effect Effects 0.000 description 2
- 230000002861 ventricular Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 210000003815 abdominal wall Anatomy 0.000 description 1
- 210000000709 aorta Anatomy 0.000 description 1
- 210000000702 aorta abdominal Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000004578 fetal growth Effects 0.000 description 1
- 210000003754 fetus Anatomy 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 230000004217 heart function Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000004660 morphological change Effects 0.000 description 1
- 238000011176 pooling Methods 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000012958 reprocessing Methods 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 210000000145 septum pellucidum Anatomy 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 210000003606 umbilical vein Anatomy 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/523—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for generating planar views from image data in a user selectable plane not corresponding to the acquisition plane
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/211—Selection of the most significant subset of features
- G06F18/2113—Selection of the most significant subset of features by ranking or filtering the set of features, e.g. using a measure of variance or of feature cross-correlation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5223—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data generating planar views from image data, e.g. extracting a coronal view from a 3D image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0866—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving foetal diagnosis; pre-natal or peri-natal diagnosis of the baby
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/465—Displaying means of special interest adapted to display user selection data, e.g. icons or menus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5223—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for extracting a diagnostic or physiological parameter from medical diagnostic data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/03—Recognition of patterns in medical or anatomical images
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Multimedia (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Computational Linguistics (AREA)
- Mathematical Physics (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Image Analysis (AREA)
Description
また近年、画質の向上や特定疾患の判定などにDL(Deep Learning)技術を適用することが試みられているが、DLで高い精度の識別力を達成するためには、高い処理能力を持つハードウェアが必要となり、また処理に要する時間も長くなるため、従来の医用撮像装置や処理の高速性が要求される医用撮像装置に搭載することは困難である。
<第一実施形態>
本実施形態の医用撮像装置10は、図1に示すように、被検体を撮像し、画像データを取得する撮像部100と、撮像部100が取得した画像データに対し画像処理を行う画像処理部200と、撮像部100が取得した画像或いは画像処理部200が処理した画像を表示する表示部310と、撮像部100や画像処理部200の処理に必要な指令やデータをユーザが入力するための操作入力部330とを備える。表示部310及び操作入力部330は、通常、近接して配置され、ユーザーインターフェイス(UI)300として機能する。医用撮像装置10は、さらに撮像部100が得た画像データや画像処理部200が処理に用いるデータや処理結果などを格納する記憶装置350を備えていてもよい。
なお時系列2D画像データの場合には、断面選出部231は、撮像断面(一方向の面)のみを選出すればよいので、高速な処理が可能となる。また所定の間隔で撮像される撮像断面を全て選択してもよい。
まず図4を参照して、本発明が適用される超音波診断装置の構成を説明する。本実施形態の超音波診断装置40は、超音波撮像部400として、探触子410と、送信ビームフォーマ420と、D/Aコンバータ430と、A/Dコンバータ440と、ビームフォーマメモリ450と、受信ビームフォーマ460とを備え、さらに、画像処理部470と、表示部480と、操作入力部490を備える。
なお、図5に示すモデル510,530及び550の層構成は、モデル縮小化の手法を説明するための一例であって、層構成は図示するものに限定されるものではなく、上述した縮小化手法に適用できる様々な層構成が含まれる。
一般に、生体のボリュームデータにおいて、計測断面位置と空間的に近いほど断面の識別スコアが高くなる。従って、図7に示すように、スコア分布705は、計測断面位置を中心としたとき、中心で最も高く中心から離れるにつれてスコアが低下する分布となるはずである。
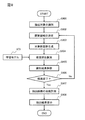
ここでは一例として、胎児の頭部大横径(BPD)、腹部周囲長(AC)及び大腿骨長さ(FL)を計測し体重推定を行う場合を例に説明する。胎児の体重推定においては、まず、図8に示すように、機械式メカプローブまた電子式2Dプローブ410を用いて、検査対象である胎児101に対し、ボリュームスキャンし、データメモリ472にボリュームデータを保存する。断面抽出部474は、データメモリ472から取得したボリュームデータ800を呼び出し、決定された探索領域内の切断位置801から断面を切り出し、対象となる切断面群802を獲得する。切り出す断面は、ボリュームデータの軸(Z軸)に対し垂直な面、Z軸に平行な面、これらを偏角方向や仰角方向に回転させた面などを含む。
自動計測部475は、これら三断面において計測した各計測値(BPD、AC、FL)を用いて、例えば次式により推定体重を算出する。
推定体重=a×(BPD)3+b×(AC)2×(FL)
(a、bは経験値から求められた係数で、例えばa=1.07、b=0.30である)
自動計測部475は算出した推定体重を表示部480に表示させる。
上述した実施形態では、1人の患者における1回の検査で撮像されたボリュームデータを処理する場合を説明したが、本実施形態は、一時刻前または過去数回にわたる検査で撮像された2D画像群についても適用できる。以下、入力データが時間的に連続する2D画像の場合を説明する。
第二実施形態とその変形例は、本発明を超音波診断装置に適用した実施形態であるが、本発明はボリュームデータ或いは時系列データを取得可能な医用撮像装置であれば、全て適用することができる。また上述した実施形態では、画像処理部は医用撮像装置の構成要素である場合を説明したが、撮像と画像処理とを並行して行わない場合には、医用撮像装置(図1の撮像部100)から空間的或いは時間的に離れた画像処理装置或いは画像処理部において、本発明の画像処理を行うこともありうる。
40 超音波診断装置
100 撮像部
101 検査対象
200 画像処理部
230 断面抽出部
231 断面選出部
233 断面識別部
235 識別結果判定部
250 モデル導入部
251 保存部
253 モデル呼出部
300 ユーザーインターフェイス
310 表示部
330 操作入力部
350 記憶装置
410 探触子
420 送信ビームフォーマ
430 D/Aコンバータ
440 A/Dコンバータ
450 ビームフォーマメモリ
460 受信ビームフォーマ
470 画像処理部
471 データ構成部
472 データメモリ
473 モデル導入部
474 断面抽出部
475 自動計測部
476 断面調整部
480 表示部
490 操作入力部
500 学習データベース
510 学習済み高精度モデル
530 未学習の簡素モデル
550 高精度の縮小化モデル
Claims (12)
- 被検体の画像データを収集する撮像部と、前記撮像部が収集した画像データから所定の断面を抽出する処理を行う画像処理部と、を備え、
前記画像処理部は、
前段に畳込層と後段にフルコネクション層とを含む学習済モデルと、前記学習済モデルよりも畳込層の数が少なくフルコネクション層の次元数が小さい未学習モデルとを融合し、前記学習済モデルの畳込層のうち入力層に隣接する特徴量抽出層及び前記未学習モデルのフルコネクション層を含む識別層を新たな層構成とする縮小化した学習モデルを導入するモデル導入部と、
前記画像データから複数の断面画像を選択し、選択した断面画像に対し前記学習モデルを適用した結果に基づき所定の断面を抽出する断面抽出部と、を備え、
前記学習済モデルは、複数の断面画像データに対し所定の断面との空間的又は時間的近さを識別スコアとして出力するように予め学習されており、
前記縮小化した学習モデルは、前記学習済モデルから転移した特徴量抽出層の重み係数を維持し、前記未学習モデルから転移した識別層の学習率が高くなるように、再学習されていることを特徴とする医用撮像装置。 - 請求項1に記載の医用撮像装置であって、
前記モデル導入部は、抽出すべき断面の種類に応じて用意された複数の学習モデルを保存するモデル保存部と、前記複数の学習モデルのうち、前記断面抽出部が選択する複数の断面画像に対応する学習モデルを呼出し、前記断面抽出部に渡すモデル呼出部と、を備えることを特徴とする医用撮像装置。 - 請求項1に記載の医用撮像装置であって、
前記断面抽出部は、前記撮像部が収集した画像データから複数の断面を選択する断面選出部と、前記断面選出部が選択した断面について前記学習モデルを適用する断面識別部と、前記断面識別部の結果を判定する識別結果判定部と、を備えることを特徴とする医用撮像装置。 - 請求項3に記載の医用撮像装置であって、
前記断面抽出部は、前記識別結果判定部の判定結果に応じて、前記断面選出部及び前記断面識別部の処理を複数回繰り返し、前記断面選出部は、繰り返し毎に前記複数の断面を選択する前記画像データの領域を変更または縮小することを特徴とする医用撮像装置。 - 請求項1に記載の医用撮像装置であって、
ユーザによる抽出断面の調整を受け付ける断面調整部を更に備え、
前記断面抽出部は、前記断面調整部が受け付けた調整の指示に従い、処理の一部を再実行することを特徴とする医用撮像装置。 - 請求項5に記載の医用撮像装置であって、
前記断面抽出部の処理結果を表示する表示部を更に備え、
前記表示部は、前記断面抽出部による処理が再実行されると表示内容を更新することを特徴とする医用撮像装置。 - 請求項1に記載の医用撮像装置であって、
前記撮像部が収集した画像データは、三次元のボリュームデータであることを特徴とする医用撮像装置。 - 請求項1に記載の医用撮像装置であって、
前記撮像部が収集した画像データは、時系列画像データであることを特徴とする医用撮像装置。 - 請求項1に記載の医用撮像装置であって、
前記撮像部は、超音波を送受信する探触子と、前記探触子が受信した超音波信号を用いて超音波画像を生成する画像生成部とを備えた超音波撮像部であることを特徴とする医用撮像装置。 - 撮像データから、処理対象となる目的断面を決定し、提示する画像処理方法であって、
複数の断面画像について目的断面画像との空間的又は時間的近さを識別スコアとして出力するように学習された学習モデルを用意するステップと、
当該学習モデルを用いて、前記撮像データから選択した複数の断面画像について前記識別スコアの分布を得て、当該分布に基き前記目的断面を判定するステップと、を含み、
前記学習モデルは、前段に畳込層と後段にフルコネクション層とを含む学習済モデルと、前記学習済モデルよりも畳込層の数が少なくフルコネクション層の次元数が小さい未学習モデルとを融合し、前記学習済モデルの畳込層のうち入力層に隣接する特徴量抽出層及び前記未学習モデルのフルコネクション層を含む識別層を新たな層構成とする縮小化した学習モデルであって、
前記学習済モデルは、複数の断面画像データに対し所定の断面との空間的又は時間的近さを識別スコアとして出力するように予め学習されており、
前記縮小化した学習モデルは、前記学習済モデルから転移した特徴量抽出層の重み係数を維持し、前記未学習モデルから転移した識別層の学習率が高くなるように、再学習されていることを特徴とする画像処理方法。 - 請求項10に記載の画像処理方法であって、
前記目的断面を判定するステップは、前記撮像データの所定の領域から複数の断面を選出するステップと、当該選出された複数の断面について前記識別スコアの分布を得るステップと、を繰り返し、繰り返し毎に複数の断面を選出する領域を狭めることを特徴とする画像処理方法。 - 請求項10に記載の画像処理方法であって、
前記撮像データは、超音波撮像装置が取得した三次元ボリュームデータ又は時系列画像データであることを特徴とする画像処理方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017146782A JP6824125B2 (ja) | 2017-07-28 | 2017-07-28 | 医用撮像装置及び画像処理方法 |
| US16/630,581 US20210089812A1 (en) | 2017-07-28 | 2018-06-07 | Medical Imaging Device and Image Processing Method |
| PCT/JP2018/021926 WO2019021646A1 (ja) | 2017-07-28 | 2018-06-07 | 医用撮像装置及び画像処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017146782A JP6824125B2 (ja) | 2017-07-28 | 2017-07-28 | 医用撮像装置及び画像処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019024925A JP2019024925A (ja) | 2019-02-21 |
| JP2019024925A5 JP2019024925A5 (ja) | 2020-02-27 |
| JP6824125B2 true JP6824125B2 (ja) | 2021-02-03 |
Family
ID=65039611
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017146782A Active JP6824125B2 (ja) | 2017-07-28 | 2017-07-28 | 医用撮像装置及び画像処理方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20210089812A1 (ja) |
| JP (1) | JP6824125B2 (ja) |
| WO (1) | WO2019021646A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12014530B2 (en) * | 2018-12-21 | 2024-06-18 | Hitachi High-Tech Corporation | Image recognition device and method |
| WO2020149428A1 (ko) * | 2019-01-15 | 2020-07-23 | 엘지전자 주식회사 | 학습 장치 |
| JP7204106B2 (ja) * | 2019-03-03 | 2023-01-16 | 株式会社レキオパワー | 超音波プローブ用ナビゲートシステム、および、そのナビゲート表示装置 |
| KR102270917B1 (ko) * | 2019-06-27 | 2021-07-01 | 고려대학교 산학협력단 | 인공 지능 모델에 기반한 자궁 양수량 자동 측정 방법 |
| KR102318155B1 (ko) * | 2019-06-27 | 2021-10-28 | 고려대학교 산학협력단 | 카메라 촬영 각도 보정 기능을 구비한 양수량 자동 측정 방법 |
| JP7347090B2 (ja) * | 2019-10-02 | 2023-09-20 | 株式会社大林組 | 鉄筋推定システム、鉄筋推定方法及び鉄筋推定プログラム |
| JP7432340B2 (ja) * | 2019-11-07 | 2024-02-16 | 川崎重工業株式会社 | 手術システム及び制御方法 |
| JP7412223B2 (ja) * | 2020-03-02 | 2024-01-12 | キヤノン株式会社 | 画像処理装置、医用画像診断装置、画像処理方法、プログラム、および学習装置 |
| JP7410624B2 (ja) * | 2020-09-14 | 2024-01-10 | キヤノン株式会社 | 超音波診断装置、計測条件設定方法及びプログラム |
| WO2023204610A2 (ko) * | 2022-04-19 | 2023-10-26 | 주식회사 온택트헬스 | 심장 초음파에 대한 가이드 방법 및 이를 이용한 심장 초음파에 대한 가이드용 디바이스 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102288308B1 (ko) * | 2014-08-05 | 2021-08-10 | 삼성메디슨 주식회사 | 초음파 진단 장치 |
| US20160081663A1 (en) * | 2014-09-18 | 2016-03-24 | General Electric Company | Method and system for automated detection and measurement of a target structure |
| US10083372B2 (en) * | 2015-11-03 | 2018-09-25 | Toshiba Medical Systems Corporation | Ultrasound diagnosis apparatus, image processing apparatus and image processing method |
-
2017
- 2017-07-28 JP JP2017146782A patent/JP6824125B2/ja active Active
-
2018
- 2018-06-07 US US16/630,581 patent/US20210089812A1/en not_active Abandoned
- 2018-06-07 WO PCT/JP2018/021926 patent/WO2019021646A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019024925A (ja) | 2019-02-21 |
| US20210089812A1 (en) | 2021-03-25 |
| WO2019021646A1 (ja) | 2019-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6824125B2 (ja) | 医用撮像装置及び画像処理方法 | |
| US11450003B2 (en) | Medical imaging apparatus, image processing apparatus, and image processing method | |
| JP6453857B2 (ja) | 超音波画像の3d取得のためのシステムおよび方法 | |
| JP6238651B2 (ja) | 超音波診断装置及び画像処理方法 | |
| KR101932721B1 (ko) | 의료 영상들의 정합 방법 및 장치 | |
| KR102522539B1 (ko) | 의료영상 표시장치 및 의료영상 처리방법 | |
| RU2642929C2 (ru) | Автоматический выбор плоскости визуализации для эхокардиографии | |
| JP5645811B2 (ja) | 医用画像診断装置、関心領域設定方法、医用画像処理装置、及び関心領域設定プログラム | |
| JP7253560B2 (ja) | ニューラルネットワークを用いた案内付き経頭蓋超音波撮像ならびに関連する装置、システムおよび方法 | |
| US20160095573A1 (en) | Ultrasonic diagnostic apparatus | |
| JP2014161734A (ja) | 医療画像を整合する方法及びその装置 | |
| KR20140096919A (ko) | 의료 영상 정합 방법 및 장치 | |
| KR102273020B1 (ko) | 의료 영상 정합 방법 및 그 장치 | |
| EP1198200A4 (en) | ECOGRAPHIC INTRAVASCULAR ANALYSIS USING AN ACTIVE CONTOURING METHOD AND SYSTEM | |
| KR20130026041A (ko) | 의료 영상의 일부 정보를 활용한 장기 영상 생성 방법 및 장치 | |
| US9357981B2 (en) | Ultrasound diagnostic device for extracting organ contour in target ultrasound image based on manually corrected contour image in manual correction target ultrasound image, and method for same | |
| JP2017153818A (ja) | 超音波診断装置、超音波診断装置制御プログラム、医用画像処理装置及び医用画像処理プログラム | |
| JP5558727B2 (ja) | 超音波診断装置および超音波診断装置のデータ処理プログラム | |
| JP2010094181A (ja) | 超音波診断装置および超音波診断装置のデータ処理プログラム | |
| US11672503B2 (en) | Systems and methods for detecting tissue and shear waves within the tissue | |
| KR20150129506A (ko) | 의료 영상 정합 방법 및 그 장치 | |
| JP6739318B2 (ja) | 超音波診断装置 | |
| US10076311B2 (en) | Method and apparatus for registering medical images | |
| KR20150131881A (ko) | 의료 영상 정합 방법, 이를 포함하는 장치 및 컴퓨터 기록 매체 | |
| JP5987640B2 (ja) | 超音波を用いた被検体の3次元復元方法および装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201222 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6824125 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |