JP6761076B2 - 眼科手術システム、方法および装置 - Google Patents
眼科手術システム、方法および装置 Download PDFInfo
- Publication number
- JP6761076B2 JP6761076B2 JP2019110216A JP2019110216A JP6761076B2 JP 6761076 B2 JP6761076 B2 JP 6761076B2 JP 2019110216 A JP2019110216 A JP 2019110216A JP 2019110216 A JP2019110216 A JP 2019110216A JP 6761076 B2 JP6761076 B2 JP 6761076B2
- Authority
- JP
- Japan
- Prior art keywords
- surgical
- sterile
- tray
- reusable
- handpiece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
























































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/15—Mayo stands; Tables
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/20—Holders specially adapted for surgical or diagnostic appliances or instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/30—Containers specially adapted for packaging, protecting, dispensing, collecting or disposing of surgical or diagnostic appliances or instruments
- A61B50/33—Trays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/02—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor using physical phenomena
- A61L2/08—Radiation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/24—Apparatus using programmed or automatic operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2/00—Methods or apparatus for disinfecting or sterilising materials or objects other than foodstuffs or contact lenses; Accessories therefor
- A61L2/26—Accessories or devices or components used for biocidal treatment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/30—Containers specially adapted for packaging, protecting, dispensing, collecting or disposing of surgical or diagnostic appliances or instruments
- A61B2050/3008—Containers specially adapted for packaging, protecting, dispensing, collecting or disposing of surgical or diagnostic appliances or instruments having multiple compartments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/008—Methods or devices for eye surgery using laser
- A61F9/00821—Methods or devices for eye surgery using laser for coagulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/14—Means for controlling sterilisation processes, data processing, presentation and storage means, e.g. sensors, controllers, programs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/16—Mobile applications, e.g. portable devices, trailers, devices mounted on vehicles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/10—Apparatus features
- A61L2202/18—Aseptic storing means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61L—METHODS OR APPARATUS FOR STERILISING MATERIALS OR OBJECTS IN GENERAL; DISINFECTION, STERILISATION OR DEODORISATION OF AIR; CHEMICAL ASPECTS OF BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES; MATERIALS FOR BANDAGES, DRESSINGS, ABSORBENT PADS OR SURGICAL ARTICLES
- A61L2202/00—Aspects relating to methods or apparatus for disinfecting or sterilising materials or objects
- A61L2202/20—Targets to be treated
- A61L2202/24—Medical instruments, e.g. endoscopes, catheters, sharps
Description
本出願はPCT出願であり、MULTI−USE SURGICAL TRAY SYSTEMという名称の2014年12月12日出願の米国仮特許出願第62/091,384号明細書、OPHTHALMIC SURGICAL SYSTEMS,METHODS,AND DEVICESという名称の2014年11月26日出願の米国特許出願第14/554,865号明細書、OPHTHALMIC SURGICAL SYSTEMS,METHODS,AND DEVICESという名称の2014年11月26日出願のPCT出願であるPCT/米国特許出願公開第2014/067717号明細書、およびOPHTHALMIC SURGICAL SYSTEMSという名称の2014年5月7日出願の米国仮特許出願第61/990,021号明細書に対する優先権を主張する。前述の出願のそれぞれは、その全体が参照により本明細書に援用される。
いくつかの実施形態では、モジュール式またはハイブリッド式手術装置またはトレイは、1つまたは複数の再利用可能な構成要素と、1つまたは複数の使い捨て構成要素(いくつかの実施形態では単回使用後に廃棄することができるか、またはいくつかの実施形態では制限された使用回数の後で廃棄することができる)とを含み、それぞれの少なくとも一部は無菌作業部位内またはそのすぐ近くに含まれる。例えば、1つまたは複数の使い捨て構成要素は、無菌作業部位内に存在するように構成された無菌構成要素を含み得、1つまたは複数の再利用可能な構成要素は、無菌作業部位のすぐ近くに残り続ける間、少なくとも部分的に、使い捨て無菌構成要素内に包含されるか、使い捨て無菌構成要素内に封じ込められるか、または(例えば無菌ドレープを使用して)無菌作業部位から隔絶されるように構成され得る。
本明細書に開示される手術システムの様々な実施形態は、使い捨ておよび/または無菌構成要素を再利用可能および/または非無菌構成要素と機能的に結合するための1つまたは複数の機能的インターフェースを含む。そのような機能的インターフェースは例えば再利用可能および/または非無菌構成要素が電力、光、流体、電子的通信および/または様々な他の機能を使い捨ておよび/または無菌構成要素に提供することを可能にし得、使い捨ておよび/または無菌構成要素が1つまたは複数の手術機能を実行することを可能にし得る。無菌構成要素と非無菌構成要素との間で利用され得る機能的接続またはインターフェースのいくつかの例が、本明細書中に開示されている。例えば、図2A〜2Kは、以下にさらに記載するように、様々な機械的回転結合を示す。そのような結合は例えば再利用可能なモータまたはギヤボックスが使い捨てポンプヘッドと結合することを可能にし得る。図3A〜3Cは特注の手術用ドレープ内の様々な機能的インターフェースを示す。示されている概念はまた、いくつかの実施形態では、無菌構成要素と非無菌構成要素との間の直接的な機能的接続においても利用され得る。図4Cは例えば電力および/または電子的通信を伝送するために電気的インターフェースを利用する実施形態を含む様々な実施形態で利用され得る電気的な機能的インターフェースの例を示す。図4Cに示される実施形態は電力および/または電子的通信用の経路を提供するために相手方電気伝導性接点を使用する例を示す。いくつかの実施形態では、しかしながら、電力および/または通信は非接触式または非電気式手段を介して伝送される。例えば、電力はいくつかの実施形態では無線および/または誘導結合を使用して伝送され得る。通信はいくつかの実施形態では光学結合および/またはそれに類する方法を介して、無線式に伝送され得る。いくつかの実施形態では機能的インターフェースは、システムの使用者が、再利用可能な構成要素の電子ディスプレイ、光および/またはそれらに類するものを見ることを可能にする透明な(または少なくとも部分的に透明な)窓、開口、または無菌構成要素の一部(例えば図4Eに示される開口408)を含み得る。いくつかの実施形態では、電気的な機能的インターフェースは、伝導性コネクタ、誘導インターフェースおよび/またはそれらに類するものを含む。いくつかの実施形態では、光学的な機能的インターフェースは、再利用可能な構成要素から使い捨て構成要素への光の伝達を可能にする光管構成要素および/またはそれに類するものを含む。いくつかの実施形態では、機能的インターフェースは、流体を再利用可能な構成要素からまたは再利用可能な構成要素へ送ることを可能にする流体コネクタを含む。
図1A〜1Fは、眼科外科的処置で使用され得る手術用トレイ10の実施形態を示す。図1Aは患者2と一緒に使用する際の手術用トレイ10の頭上図または上面図を示す。この実施形態では手術用トレイ10は、患者の頭部周囲に配置された空隙または切欠き102を含む。図1B〜1Fはさらに手術用トレイ10と、手術用トレイ10を手術台、椅子またはストレッチャー13に取り付けることができる1つの方法とを示す。いくつかの実施形態では、図1Cに示されるような手術台13は、図1Bにより詳細に示される手首支持体などの支持体12を含む。支持体12は支持バー16と、手術台13の頭部に接続するように構成された端部14とを含む。図1Eに示されるように、いくつかの実施形態では、手術用トレイ10は、ベース部分104と嵌合するように構成された天板部分101を含み得る。ここに示されている実施形態においてベース104は、手術台13への天板部分101の効果的かつ構成可能な取付けを可能にする取付構造部分として望ましくは意図される。いくつかの実施形態では、本明細書中さらに記載されるように、ベース部分は、例えばモータおよび/またはポンプ、電子機器および/またはそれらに類するものなど、さらなる機能的特徴部を含み得る。ベース部分104は、ベース104を手術台13の支持体112に取り付けるまたは結合することを可能にするように構成された1つまたは複数の溝穴106または他の特徴部を含み得る。いくつかの実施形態では、ベース部分104を支持体112に保持するためにストラップが使用され、このときストラップは溝穴、溝、または凹部106を通過する。いくつかの実施形態では、手術用トレイ10は、とりわけ、天板部分101とベース部分104との間の弛みを除去し天板部分101とベース部分104との間のより頑丈な接続を維持することを補助するようにベース部分104の頂部に配置されたパッド108を含む。
いくつかの実施形態では、眼科手術システムは、トレイをベースに配置する前に無菌バリヤを形成するために非無菌永久ベースを布で覆うために使用可能なドレープなどの特注無菌バリヤを含む。ドレープはいくつかの実施形態ではベースおよびトレイに形状が適合され得る。ドレープはいくつかの実施形態では、光、電気装置、機械的装置および/またはそれらに類するものがそれを通過することを可能にする1つまたは複数の特徴部などの1つまたは複数の機能的特徴部を含み得る。例えば、ドレープは、ベース内のディスプレイを見ることを可能にする1つまたは複数の透明な窓を含み得る。いくつかの実施形態では、ドレープは、電気的、機械的および/または流体的/空気圧的な接続がトレイとベースとの間に設けられることを可能にするためにトレイがベースに取り付けられるとき破られるか穴あけされる穿孔を含み得る。いくつかの実施形態では、ドレープは穿孔を一切含まないこともあるが、それにもかかわらず、トレイおよびベースが嵌合されるとき特定の領域に穿刺または穿孔され得る。いくつかの実施形態では、トレイおよびベースは、設置プロセスの間無菌バリヤが確実に維持されるように穿孔が形成される前に穿孔される領域の周囲にシールを形成し得る。いくつかの実施形態では、ドレープは、ドレープを破ることもなければ穿刺することもなく、および無菌バリヤを妥協することもなく1つまたは複数の電気的接続がベースとトレイの間に形成できるように一体化された電気接点を有し得る。これらの電気接点はいくつかの実施形態では、別個の接点をドレープ材料に一体化することによって形成され得、またはドレープ材料自体が、異方性伝導性である材料から作製され得るかそのような材料を適切な領域に組み込み得、その結果、電流が薄いドレープ材料を通って流れることができるが、多数の隣接する電流経路は互いに相互作用しない。他の実施形態では、動力はドレープの両側に配置された2つのアンテナの誘導結合を経由して、または同様の無線式動力伝送方法を経由して、ドレープを介して無線式に伝送される。
いくつかの実施形態では、本明細書に記載されるような手術用トレイはモジュール式であり得、1つまたは複数のモジュールがそれに結合されるように構成されたベース、すなわち再利用可能な部分を有する。いくつかの実施形態では、ベース部分は、少なくとも所定の処置回数および/または使用長さの間、再利用できるように構成される一方で、モジュールの実施形態における1つまたは複数は単回使用後などに処分できるように構成される。いくつかの実施形態では、モジュール式手術用トレイシステムは、再利用可能底トレイ部分に結合された使い捨て天板トレイ部分を含む。いくつかの実施形態では、モジュール式手術用トレイシステムは、モータ/ポンプモジュール、流体貯蔵器受入装置モジュール、電流アダプタモジュール、1つまたは複数のハンドピースを含むモジュール式器具インサート、および/またはそれらに類するものなど、1つまたは複数の機能的モジュールを挿入するための1つまたは複数の位置を有する再利用可能トレイを含む。
トレイおよび/またはベースユニットはまた、いくつかの実施形態では、使用者が特定の設定および/または使用者プロファイルをローディングすることを可能にする方法を含み得る。例えば、トレイまたはベースは、いくつかの実施形態では、吸引および注入範囲、ボタン機能、ハンドピース設定および/またはそれらに類するものなど、使用者の嗜好によってプログラムされた「タグ」(例えば使用者のIDバッジに位置する)を読み取る無線RFIDリーダまたは近距離無線通信(NFC)リンクを含み得る。いくつかの実施形態では、タグは、タグ自体が使用者の嗜好でプログラムされる代わりに、使用者の嗜好に関連付けられた識別子を含む。いくつかの実施形態では、システムは、タグが無線リーダによって読み取られると、自動的に使用者の嗜好を適用するようにおよび/または特定の使用者またはタグに関連付けられる設定をローディングするように構成される。いくつかの実施形態では、トレイは無線リーダのアンテナ部分を含み、ベースは、トレイがベースに接続されているときアンテナ部分に電気的に接続されることができる、処理ユニットなどの無線リーダの別の部分を含む。そのような設計は、処理ユニットなど無線リーダのより高価な部分を再利用できるようにするために有利であり得る。トレイおよび/またはベースユニットは、いくつかの実施形態では、とりわけ設定および/または使用者プロファイルをローディングまたは設定するために、使用者が情報をトレイまたはベースに伝送することを可能にするUSBまたはメモリカードインターフェースまたは同様の手段を含み得る。
様々な実施形態における手術用トレイは、外科的処置を実行するために多数の構成要素および/または機能の1つまたは複数を提供するように構成可能である。上に記載した構成要素および機能に加えて、構成要素および/または機能は、非限定的に、注入、吸引、1つまたは複数のハンドピース、照明、レーザ治療、ディスプレイ、音響フィードバック、1つまたは複数のフットペダル、および貯蔵器を含み得る。これらの構成要素および機能を以下でより詳細に記載する。
いくつかの実施形態においてトレイは、例えば、本明細書に開示される様々なハンドピース実施形態の1つなどのハンドピースを使用することによって、流体(平衡塩類溶液(BSSとしても知られる)およびシリコーン油を含む他の流体、粘弾性ゲル、染料/染剤、および/またはそれらに類するもの)および/またはガスを目の中へ、後眼房または前眼房のいずれかへ注入することを実現し得る。注入源(例えばボトルまたはバッグ)は、充填レベルを照らすために照明(例えばLED)を含み得るが、好ましくは必ずしも外科医の低光量の視界に対する影響を最小化するためにその色が赤であるということはない。注入流体経路はいくつかの実施形態では注入圧力および/または眼圧および/または注入流量を測定するために圧力および/または流れセンサを含み得る。流体経路およびセンサはいくつかの実施形態ではフィルタまたは膜によって分離され得、流体の汚染および/またはセンサの損傷を防止し、またはいくつかの実施形態では非接触型の測定法が利用され得る。トレイはいくつかの実施形態では、カップホルダまたはフックおよび/またはそれらに類するものなど、注入流体ボトルまたはバッグを保持または固定する手段、およびボトルまたはバッグの中身を抽出するためのスパイク、針、または流体アタッチメントを含み得る。トレイは異なる流体またはガスを同時に、必要に応じて、または特定の順序で注入する1つまたは複数の注入システムを含み得る。トレイは、異なる注入源(例えばBSSまたは油)または注入位置(例えば左目の隣の注入ポートに対し右目の隣の注入ポート)の間で選択できるように止水栓または他の弁(手動または自動化されている)を含み得る。
いくつかの実施形態では、トレイは、例えば硝子体カッター、軟質先端または水晶体ハンドピースから吸引機能を提供し得る。吸引機能はポンプの使用を介してまたは別の手段によって提供され得る。ポンプの様式は、標準型ベンチュリ、ぜん動性、またはダイヤフラム設計、あるいは別の種類であり得る。吸引ポンプシステムは同じく、針先端での真空引きを達成するために他の動作機構、例えば、直接またはチューブを介して吸引針に接続された押圧プランジャを備えたシリンジを利用する場合もあり、前記プランジャは真空力を生成するために引き戻され、引き戻しの動作は手動で(例えば外科医または助手によって外科医に対して)または半自動化または完全自動化プロセス(例えばシリンジポンプ機構、アクチュエータ、モータ、サーボ、ボールねじ/親ねじ、ばね、および/またはそれらに類するもの)を介して、および/またはそれらに類する方法を介して達成される。いくつかの実施形態は、例えばベンチュリ作用を介して吸引用に真空を生成するために、圧縮ガス(前に記載したものなど)を利用し得る。吸引流体経路は、いくつかの実施形態では、吸引真空圧および/または吸引された流体流量を測定するために圧力または流れセンサを含み得る。流体経路およびセンサは、いくつかの実施形態では、流体の汚染およびセンサの損傷を防止するためにフィルタまたは膜によって分離され得、または非接触式の測定方法が利用され得る。
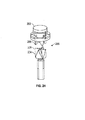
いくつかの実施形態では、トレイシステムは、外科的処置の間に目の前眼房または後眼房のいずれかへ挿入される針(例えば18ゲージ、20ゲージ、23ゲージ、25ゲージ、27ゲージまたは他のサイズ)を含み得る1つまたは複数の手持ちプローブまたはハンドピースを含み得る(例えば図1E、4A、5A、6Aおよび8Aを参照して本明細書に記載した様々なハンドピースのうちの1つまたは複数など)。ハンドピースはいくつかの実施形態では、硝子体カッター/吸引器、内部照明装置、レーザ治療/光凝固プローブ、ジアテルミー/電気焼灼器/アブレーションプローブ、剪刃、軟質先端押出しプローブ、水晶体超音波吸引/水晶体細片除去プローブ、眼内水晶体(IOL)挿入装置、鉗子、機械的プローブ、および/または他の一般的に使用される器具のうちの1つまたは複数を含み得る。いくつかのハンドピースは、1つより多くの機能を組み込み得る。ハンドピースはいくつかの実施形態では、外科医がその特定ハンドピースの機能および/または場合によっては他の機能(例えば注入または吸引速度など)も制御することを可能にする1つまたは複数のボタンおよび/または他の使用者インターフェース特徴部を含み得る。
いくつかの実施形態では、トレイシステムは、硝子体網膜処置の間、硝子体を取り除くための硝子体カッターハンドピースを含む。このハンドピースはいくつかの実施形態では、動力を供給する複数導体ケーブルと、任意選択の通信インターフェース(例えばトレイまたはベースユニット電子装置と通信するために、例えばハンドピース上のボタンを押した状態で)とを経由してトレイに繋がれ得る。いくつかの実施形態では、カッター機構は、ハンドピースの内側のモータまたはモータおよびギヤアセンブリによって動力を供給され得る。いくつかの実施形態では、カッター機構は、1つまたは複数の柔軟性空気圧チューブを経由してハンドピースに接続される外部空気圧源(例えばポンプ、コンプレッサ、圧縮ガス源および/またはそれらに類するもの)によって空気圧的に動力を供給され得る。外部空気圧源は、トレイまたは非使い捨てベースユニット(前に記載したようなベースを組み込む実施形態の場合)内に配置され得る。カッター機構はいくつかの実施形態では、1つまたは複数の軸内を回転、往復または平行移動する伝達ケーブルまたはトルクコイルによって動力を供給され得る。電磁気の原理を用いることにより、ケーブルまたはコイルは、例えば磁石をワイヤコイルの近くで回転または移動させ、ハンドピースの電子装置に動力を供給することができる電流を生成することによって、ハンドピースに動力を供給するためにも使用され得る。ケーブルまたはコイルは、ハンドピースの外側に、例えばトレイまたは非使い捨てベースユニット内に配置されるモータ、ソレノイド、電磁石、線形アクチュエータ、および/またはそれらに類するものによって駆動され得る。ハンドピースに接続されたケーブルまたはコイルは、手術室の外科医または助手による簡単な設定を可能にするために、シャフト結合、スプライン結合、または同様のものを経由してベース内のモータまたは駆動アクチュエータに結合され得る。いくつかの実施形態では、モータとケーブルまたはコイルとの間に無菌領域を維持するために磁性結合が使用され得る。切断速度、吸引速度および他の機能はハンドピース自体の上のボタンまたは他の使用者インターフェースによって、またはフットペダルを介して制御され得る。
いくつかの実施形態では、トレイシステムは、目の内側に照明を提供する内部照明装置ハンドピースを含み得る。このハンドピースは、いくつかの実施形態では、動力を供給する複数導体ケーブルと、任意選択の通信インターフェース(例えばトレイまたはベースユニット電子装置と通信するために、例えばハンドピース上のボタンを押した状態で)とを経由してトレイに繋がれ得る。内部照明装置はいくつかの実施形態では、内視鏡的な針に導入されたファイバまたはファイバ束に結合された光源(例えば白色LEDまたはRGB LED)を組み込み得る。あるいは、光源は、トレイまたはベースユニット内に配置され得、ハンドピース内の内視鏡的な針内で終端するファイバまたはファイバ束に(永久的にまたは着脱可能なインターフェース部を用いて)結合され得る。
トレイシステムは、いくつかの実施形態では、網膜から硝子体および流体を吸引するために軟質チューブ材料(例えばシリコーンまたはそれに類するもの)を組み込む軟質先端押出しハンドピースを含み得る。このハンドピースはいくつかの実施形態では動力を供給する複数導体ケーブルと、任意選択の通信インターフェース(例えばトレイまたはベースユニット電子装置と通信するために、例えばハンドピース上のボタンを押した状態で)とを経由してトレイに繋がれ得る。吸引速度および他の機能はハンドピース自体の上のボタンまたは他の使用者インターフェース特徴部によって、またはフットペダルを介して制御され得る。内部照明出力および他の機能(注入速度など)はいくつかの実施形態ではハンドピース自体の上のボタンまたは他の使用者インターフェース特徴部によって、またはフットペダルを介して制御され得る。
トレイシステムは、いくつかの実施形態では、組織の制御された焼灼を可能にする双極性電気焼灼器ハンドピースを含み得る。このハンドピースはいくつかの実施形態では、絶縁層(例えばポリイミドチューブまたはそれに類するものなど)によって分離された2つの入れ子型針またはチューブを含み得る。2つの針またはチューブの露出された遠位端は双極性電気焼灼器の電極として機能する。このハンドピースはいくつかの実施形態では動力を供給する複数導体ケーブルと、任意選択の通信インターフェース(例えばトレイまたはベースユニット電子装置と通信するために、例えばハンドピース上のボタンを押した状態で)とを経由してトレイに繋がれ得る。このハンドピースはいくつかの実施形態では、電気焼灼器に必要な高電圧波形を生成するために一体化された電子装置を有し得、代替的には電気焼灼器迂遠はトレイまたはベースユニット内に配置され得、絶縁ワイヤを介してハンドピースに供給され得る。ジアテルミー/電気焼灼器機能および他の機能はハンドピース自体の上のボタンまたは他の使用者インターフェース特徴部によって、および/またはフットペダルを介して制御され得る。
トレイシステムは、いくつかの実施形態では、光凝固を可能にするファイバーベースレーザハンドピースを含み得る。このハンドピースはいくつかの実施形態では動力を供給する複数導体ケーブルと、任意選択の通信インターフェース(例えばボタン押圧およびシステム状況をトレイ電子装置に伝えるため)とを経由してトレイに繋がれ得る。このハンドピースはいくつかの実施形態では、光凝固のために十分な出力を有するレーザダイオードなどの光源を組み込み得る。レーザダイオードはいくつかの実施形態では、目または他の手術部位に挿入するための内視鏡的な針の内側に取り付けられたファイバまたはファイバ束に結合され得る。代替的に、光源および関連する光学素子は、いくつかの実施形態では、トレイまたはベースユニット内に配置され得、ハンドピース内に配置された内視鏡的な針内で終端するファイバまたはファイバ束との永久的または交換可能な光学インターフェース部を有する。レーザ治療出力および他の機能は、いくつかの実施形態では、ハンドピース自体の上のボタンまたは他の使用者インターフェース特徴部によって、および/またはフットペダルを介して制御され得る。
トレイシステムは、いくつかの実施形態では、外科医が、剪刃の切断機構を圧搾、摺動または起動するために手動操作を必要とすることなく、例えば指を使うことなく組織を切断することを可能にする電動剪刃ハンドピースを含み得る。一実施形態では、剪刃は、動力を供給する複数導体ケーブルと、任意選択の(例えばトレイ電子装置との)通信インターフェースとを経由してトレイに繋がれ得る。切断機構への動力は、いくつかの実施形態では、繋がれたケーブルを経由してトレイによって提供される。切断機構は、いくつかの実施形態では、モータ、ソレノイド、線形アクチュエータ、ニチノールまたは形状記憶合金ワイヤ(例えば、電流がワイヤを通して流されると収縮し電流が止まりワイヤが冷えると拡張するワイヤ)および/またはそれに類するものを含み得る。代替実施形態はアクチュエータをトレイまたはベース内に配置し得、および機械的な切断は、1つまたは複数の軸に沿って回転、往復または平行移動される伝達ケーブルまたはトルクコイルなどの連結具を経由してもたらされ得る。
いくつかの実施形態では、トレイは、ハンドピースが使用されないときハンドピースを保持するように構成された空間(例えば、図1Eに示される空間111など)を含み得、および/または電気的、流体的、空気圧的、光学的、および/または機械的なインターフェースのうちの1つまたは複数を経由してハンドピースに接続性を提供し得る。ハンドピースを保持するための空間およびトレイの上面は一般に、いくつかの実施形態では、処置の間にトレイ上に存在し得る望ましくない流体に対処する特徴部を含み得る。例えば、トレイの上面およびハンドピース領域(窪んだポケットまたは竪穴であり得る)は、流体を排出するか流体を運び去るための窪んだチャネルまたは穴を有し得る。同様に、いずれの窪んだ領域も、不要な流体を吸収するために吸収材またはスポンジ状材料を含み得る。ハンドピースは手術前設定手順を簡単にするために梱包および殺菌前にトレイ内に取り付けられ得る。トレイはいくつかの実施形態では、例えばトレイの輸送または移動の間、ハンドピースを適所に固定することを可能にするクリップ、ストラップまたは他のロック機構を含み得る。追加的なハンドピースは別個に梱包および殺菌され得、それにより、例えば処置の間、新しいトレイシステム全体を開ける必要なく、故障したハンドピースを交換できるようにする。
ハンドピースのいくつかの実施形態は、ハンドピースに配置された1つまたは複数のボタンまたはスイッチ(例えば膜、触覚性、押しボタン、回転式、ジョイスティック、ホール感知、容量性接触、圧力感知、および/またはそれらに類するものを含む)、および/または慣性センサ(ジャイロ、加速計、磁力計、および/またはそれらに類するもの)などの使用者入力を取得する1つまたは複数の手段を含む。これらの入力方法は、例えばプローブチップ運動および吸引機能を起動、停止および制御するなど、ハンドピースおよび/またはコンソールの1つまたは複数の機能を制御するために使用することができる。例えば、いくつかの実施形態では、外科医は、乳化/細片除去を起動するために1つのボタンを押して保持し、乳化/細片除去を停止するためにそのボタンを離し得る。外科医は、吸引速度を繰り返すために別の別個のボタンを繰り返し押して離し得る。慣性センサはいくつかの実施形態では位置追跡および使用者入力のために使用可能である。例えば、外科医は、ある機能を実行するためにハンドピースを特定の態様で方向付けるまたは移動させ得る。1つの例は、ハンドピースがトレイまたはテーブルの上で上下逆さまに置かれるときシステムを停止することであろう(システムはハンドピースの上下逆さまの向きおよび運動/移動の欠落を認識するであろう)。第2の例は、ある機能を起動または停止するために指でハンドピースを軽く叩くことであろう(加速計が、叩くことによって生じるハンドピースの偏向を検出する)。さらに別の例は、速度吸引または他の何らかの機能を増大するためにハンドピースを時計回りに回転させ、および吸引速度または他の何らかの機能を低減するためにハンドピースを反時計回りに回転させることであろう(この際、角度移動がジャイロによって検出される)。使用者入力はいくつかの実施形態ではハンドピース内で内部で処理または作用され得、または入力はいくつかの実施形態では例えば繋がれた電気的接続(例えば伝導性ワイヤ/ケーブル)または無線接続(例えば、RF、誘導性、または赤外線)を経由して別個のコンソールまたはトレイに中継され得る。ハンドピースはいくつかの実施形態では使用者入力を記録し、ハンドピースの機能を制御し、および/またはシステムの外部構成要素(例えばコンソールまたはトレイ)と通信するためにマイクロコントローラまたはマイクロプロセッサを含み得る。ハンドピースはいくつかの実施形態では別個のコンソール、トレイ、ディスプレイおよび/または他のハンドピースへ/から情報を送るおよび受け取るために無線性能を含み得る。
いくつかの実施形態では、使用者入力は、電気的または電気機械的特徴部の代わりに(またはいくつかの実施形態ではそれに加えて)光学素子および光ファイバの原理に依拠するボタンを使用して検出することができる。例えば、いくつかの実施形態では、1つまたは複数のボタンが、1つまたは複数のファイバ、光管、またはそれに関連付けられる光導波路を有し得、ファイバはハンドピースからトレイまたはベースユニット電子装置まで(連続ファイバとして、または一緒に光学的に接続された1つまたは複数のファイバ部分として)延びる。ファイバは光源(トレイまたはベースユニットに配置される光源など)に結合され得、光をボタンの位置まで伝播し得る。ボタンは押圧されるとファイバを曲げるまたは撓ませるように設計され得、ファイバを通る光の伝播を低減または消去しおよび/またはファイバを通る光の偏光を変化させるが、その両方は電子装置によって検出されおよびボタン押圧を示すように使用することができる。他の実施形態は代わりに、光の経路(例えばボタン上の反射表面、外科医の指先等)を変更するかルーティング/再ルーティングし、それにより変化がボタン押圧として検出され特定されることができるようにする。ファイバ干渉分光法の原理が同じく使用可能であり、その結果、干渉縞およびその位置を変更する相への変化が検出されかつボタン押圧として解釈されることができるようにボタンの押圧がファイバを十分に変更する。同様の方法において、ファイバブラッググレーティングセンサ、長期間ファイバグレーティングセンサおよび同様の実施形態を、歪みを検出するためにファイバに一体化することができ、それによりファイバおよびそれらの位置の変化を検出する。いくつかの実施形態は本明細書に開示される光学技術のうちの1つを利用し得、いくつかの実施形態はそれら光学技術のうちの2つ以上を利用し得、および/またはそれら光学技術のうちの1つまたは複数と、1つまたは複数の非光学技術とを利用し得る。
いくつかの実施形態では、空気圧および/または液圧原理を利用するボタンがハンドピースに組み込まれ、これはいくつかの実施形態では(光学ボタン実施形態と同様に)ハンドピースとトレイまたはベースユニットとの間の電子装置または電気的インターフェースの必要性を排除することができる。
いくつかの実施形態では、圧電材料(例えば圧電水晶またはそれに類するもの)を含むボタンが使用者入力機能を提供する。圧電結晶は曲折、屈曲またはその他の方法で屈折されると、入力メカニズムとして使用可能な電圧スパイクを発生する。例えば、圧電材料を屈折するように設計された機械的ボタンは、ボタンが押圧されると電圧を発生する。圧電材料が電気ワイヤを経由してトレイまたはベースユニット内の(またはいくつかの実施形態ではハンドピース内の)電子装置に結合される場合、この電圧スパイクは検出され、ボタン押圧として解釈されることができる。この実施形態においてハンドピースが電気ワイヤによってトレイまたはベースユニット電子装置に繋がれている一方で、この実施形態においてハンドピース自体において必要とされる能動的電子装置はなく、いずれかのワイヤまたはケーブルを経由してハンドピースに動力を供給することは必須ではない。複数のボタンをハンドピースに組み込むことができ、そのそれぞれは別個の回路を完成させ(例えば、ボタン1つあたり2本の独立したワイヤ、または1本の独立したワイヤおよび1本の共有アース線)、あるいはボタンが押圧されると発生される電圧の大きさに基づいて各圧電素子が他と区別可能であるように電圧の異なる範囲を生成するべく各圧電素子を設計することによって、複数のボタンはトレイまたはベースユニットに対して1つの回路またはワイヤ対を共有することができる。
本明細書に開示される実施形態は、プローブチップおよび吸引の作動、および使用者入力の受信および/または処理を含むがそれらに限定されない意図された機能を実行するために様々な動力源のうちの1つまたは複数を利用し得る。ハンドピースはいくつかの実施形態では、電気ワイヤを経由して動力(例えばDCまたはAC電圧または電流)を供給するコンソールまたはトレイに繋がれ得る。ハンドピースはいくつかの実施形態では、充電可能(二次)内部バッテリ(リチウムイオン/リチウムポリマー、NiMH、NiCdまたは他の化学的性質など)、充電不可能(一次)内部バッテリ(アルカリ、リチウムマンガン、または他の化学的性質など)、および/または十分な容量の内部キャパシタ(「スーパーキャパシタ」または「ウルトラキャパシタ」など)によって動力供給され得る。ハンドピースはいくつかの実施形態では、無線動力結合システムを経由して無線式に動力供給されることができる。例えば、ハンドピースは、ハンドピースの近くに戦略的に配置されかつ電力増幅器によって駆動される「一次」コイルから誘導的に動力供給されることができる「二次」コイルを組み込み得る。例えば、一次コイルは顕微鏡に取り付け可能であり、かつ二次コイルを含み外科的処置の間外科医によって顕微鏡の下方に配置されるハンドピースに動力供給するように使用可能である。誘導性リンク(または異なる誘導性リンク)もいくつかの実施形態では、ハンドピースとトレイまたはコンソールとの間の双方向通信用に使用可能である。ハンドピースはまた、いくつかの実施形態では、乳化および吸引を実現するために、空気圧的にまたは液圧的に動力供給され得る(例えばチューブセットを用いてコンソールまたはトレイに繋がれる)。ハンドピースはいくつかの実施形態では、移動、往復または回転するケーブル伝達またはトルク伝達コイルによって動力供給され得る。ハンドピースはいくつかの実施形態では、巻き取られたばねを経由して動力供給され得る。ハンドピースはいくつかの実施形態では、ケーブル動力、空気圧的動力または液圧的動力を、例えば内部マイクロコントローラ、センサ、アクチュエータ、および/またはボタンに動力供給するために電気に転換するタービンまたは他の手段を含み得る。ハンドピースはいくつかの実施形態では、ハンドピースグリップ部分に対して外科医によってなされる圧迫、握り、回転または滑り運動を有用な運動(例えばプローブチップを起動するための往復または回転運動)に変換することによって動力供給され得る。ハンドピースはいくつかの実施形態では、圧縮空気、例えばハンドピースに挿入されるキャニスタまたはカートリッジ、または外部源によって動力供給され得る。追加的な動力源が、所望の機能を提供するために使用され得、いくつかの実施形態では2つ以上の動力源がハンドピースに動力供給するために使用され得る(例えば水晶体超音波乳化吸引術のために水晶体ハンドピース内に取り付けられた圧電水晶を駆動するAC電圧、および水晶体ハンドピースの吸引を実現するための空気圧動力)。
いくつかの実施形態は、前眼房または後眼房からの眼圧示度を提供するためにハンドピースの遠位先端に圧力センサを組み込む。圧力センサ示度(および/または圧力センサ示度から得られる情報)は(例えば独立型ディスプレイ、ヘッドアップディスプレイ、顕微鏡内ディスプレイ、またはトレイまたはコンソールに一体化されるディスプレイに)視覚的に表示可能であり、および/または音響的に知らせることができる。いくつかの実施形態では、警報および/または安全対策が圧力センサ示度に基づいて起動され得る。さらに、圧力センサ示度は、いくつかの実施形態では、前部領域または後部領域処置の間、注入および/または吸引の速度を制御するためにフィードバック制御ループで使用され得る。圧力センサはいくつかの実施形態では、MEMS種のものであり得る。圧力センサはいくつかの実施形態では、ファイバベース設計であり得る。いくつかの実施形態では、圧力センサは、(例えばハンドピースの遠位先端の代わりに)別個の構成要素に組み込まれ、別個の構成要素も目の前眼房または後眼房に挿入されるかそれに隣接して同様に配置される。例えば、圧力センサは注入カニューレまたはシャンデリア光源に組み込まれ得、圧力測定値は注入速度を制御するために使用される。他の実施形態は、確立された測定技術を介して取得され、ハンドピースまたはトレイ電子装置によって処理される外部IOP測定値を利用するように構成され得る。
いくつかの実施形態では、トレイは手術部位に照明を提供するための1つまたは複数の光源を含み得る。内視鏡に基づく照明装置(内部照明装置)およびシャンデリア照明装置などの他の照明装置は、1本のファイバまたは複数のファイバの束を経由して光源に結合することができる。ファイバはいくつかの実施形態では、結合効果を最大化するために大きい数値の開口を有し得る。ファイバはいくつかの実施形態では、LED源に突合せ結合され得るか、レンズ系を介してインターフェースされ得る。内部照明装置およびシャンデリア照明装置、および/または同様のものは、ファイバを経由して光源に永久的に結合可能であり、またはそれらは、光源からの光をファイバへ効果的に結合しおよびハンドピースのファイバを外科医の意志でまたは要望に応じて取り付けおよび光源から取り外すことを可能にする光学コネクタ構成を経由して結合され得る。トレイはいくつかの実施形態では、高輝度の蛍光体ベースの白色LEDおよび/またはRGB LEDを含み得る。2つ以上の源が、例えば光学的結合を介して1つのハンドピース内部照明装置と1つのシャンデリア照明装置とを同時に受け入れるために提供され得る。あるいは、1つの光源を、自由空間またはファイバスプリッタを介して、2つ以上の照明構成要素の間で共有することができる。RGB LEDの構成色は、いくつかの実施形態では、異なる条件の下で、例えば染料、染剤、またはインジケータの存在下に、改善された視覚を提供するために個々に調整され得る。他の実施形態は、ファイバを経由してハンドピースに結合されたトレイおよびオプチカル内に配置されたキセノン、水銀、ハロゲン、および/または他の光源を含む。代替実施形態は、ハンドピース自体に光源(例えばLEDまたはレーザ)を含む。光源は、光を内部照明装置プローブの遠位先端まで伝播する光管、ファイバまたはファイバ束を含有する針に結合(突合せ結合または他の方法)され得る。ファイバまたはファイバ束はいくつかの実施形態では、LEDとファイバとの間の結合効果を最大化するために大きい数値の開口を有し得る。あるいは、LEDは針の遠位先端に配置され得、好ましくは外部環境からシールされ得る(例えば針の遠位先端で透明窓の後ろで、またはエポキシ中に埋め込まれる)。
いくつかの実施形態では、トレイは、手術部位で光凝固、アブレーション、切断、および/または他のレーザ治療を実現するための1つまたは複数のレーザ源を含み得る。例えば、レーザ治療プローブハンドピースは、目に挿入される内視鏡針内に取り付けられるファイバまたはファイバ束を含み得る。ファイバプローブは、処置の間に使用するために治療レーザの焦点を合わせるまたは治療レーザをコリメートするように構成され得る。レーザ治療プローブは、いくつかの実施形態では、ファイバを経由して光源に永久的に結合され得るか、またはそれらはいくつかの実施形態では、光源からの光をファイバに結合する取外し可能な光学コネクタを経由して結合され得る。代替実施形態はハンドピース自体にレーザ源を含む。レーザ源は、光をレーザ治療プローブの遠位先端まで伝播する光管、ファイバまたはファイバ束を含有する針に結合(突合せ結合または他の方法)され得る。
いくつかの実施形態では、トレイは、システム情報を表示するための1つまたは複数のディスプレイ(例えば、インジケータ、インターフェース、LCD、および/またはLDE)を含み得る。トレイは音響フィードバックも含み得る。ディスプレイはまた、トレイから離れて配置され得る。ディスプレイはヘッドアップ構成で(例えば顕微鏡に)取り付けられ得るか、顕微鏡の視野内で表示するために顕微鏡の光路に突出され得る。ディスプレイはいくつかの実施形態では、頭を回すことなく見ることができるように外科医の左および/または右側周囲にトレイにまたはその上に配置され得る。ディスプレイはいくつかの実施形態では、外科医の前でトレイに直接配置され得、下を見ると見ることができ、ディスプレイからの光の汚染が顕微鏡の対物レンズに入射することまたは外科医の視界に影響を及ぼすことを防止するシェードまたはカバーを設けられ得る。あるいは、ディスプレイはフィルム、窓、または他の透明カバーを有し得、それらは偏光されているか、またはレンズ状の溝、パララックスバリヤ、または制限された視野から見ることを可能にするまたは光の汚染を防止するために特定角度のみから透明である他の特徴部を含む。
いくつかの実施形態では、トレイは、外科医にフィードバックを提供する音響性能を含み得る。音響フィードバックはいくつかの実施形態では、異なる周波数、振幅、持続時間および/またはそれらに類するものを有する様々な音調を含み得る。音響フィードバックはいくつかの実施形態では、より有用かつ完全なフィードバック情報を外科医に提供することができる音声プロンプトを含み得る。音声プロンプトはデジタル化された音響記録/サンプルまたは合成された言語であり得、また音声プロンプトは不揮発性メモリ(例えば、フラッシュメモリまたはハードドライブ)に記憶され得る。トレイ電子装置はいくつかの実施形態では、音声プロンプト(および/または音調、および/または他の音響フィードバック)を制御するマイクロコントローラまたはマイクロプロセッサを含み得、外科医、ハンドピースのハードウェアまたはソフトウェア、トレイのハードウェア/ソフトウェア、および/またはそれらに類するものからの入力に基づいて適切な音響フィードバックを起動する。
いくつかの実施形態では、トレイは、ハンドピースおよび/またはトレイ機能(例えば、注入および吸引速度、カッター速度、照明出力および/またはそれらに類するものを含む)の制御を可能にする1つまたは複数のフットペダル(繋がれているまたは無線式)を含み得るかそれに接続され得る。
いくつかの実施形態では、トレイは、例えばハンドピース、縫合糸、シリンジ/針、トロカール、および/または他の器具または備品を含む、外科的処置の間に使用される物品を保持、保管、または固定するように構成された1つまたは複数の領域(例えば穴、キャビティ、容器、空隙、ポケット、フック、締結具、磁石、および/または同様のもの)を含み得る。トレイはまたいくつかの実施形態では、鋭利物を安全に確保または処分するための一体化された鋭利物用の容器を含み得る。トレイはいくつかの実施形態では、針、鋭利物、および他の金属物品/器具を適所に保持するための磁石または磁性表面を含み得る。
1つの好ましい実施形態では、トレイシステムは、使い捨て電子装置および使い捨てポンプ(注入および/または吸引用)を含む使い捨てトレイを含む。トレイシステムはまた、使い捨てハンドピースを含み、使い捨てハンドピースは、ハンドピースの1つまたは複数に一体化された電子装置および機能的構成要素(例えば硝子体カッター用のモータ、照明用のLEDおよび/またはそれらに類するもの)を有する。いくつかの実施形態では、トレイシステム全体は、単回使用後または制限された使用回数後に処分されるように意図されている。
本明細書に開示される手術用トレイシステムのいくつかの実施形態は、(上でさらに考察したように)モジュール式またはハイブリッド式の設計を含み、ここでは1つまたは複数の使い捨て部分が1つまたは複数の再利用可能な部分と結合して完全な手術用トレイシステムを形成する。いくつかの実施形態では、使い捨て部分は無菌であり、再利用可能な部分を無菌手術領域から隔絶するように構成された無菌キャビティまたは筐体を含む(または提供するまたは形成する)。いくつかの実施形態では、無菌キャビティは再利用可能な部分を完全に封じ込める。他の実施形態では、無菌キャビティは、再利用可能な部分を無菌手術領域から隔絶するように再利用可能な部分を少なくとも十分に覆うが、再利用可能な部分を完全に封じ込めるわけではない。例えば、キャビティは、再利用可能な部分の上面および側面を覆うように構成されるが、再利用可能な部分の底面は覆わないまま残し、このとき底面は、無菌手術領域の外に置かれるように意図され、従って再利用可能な部分が無菌手術領域のすぐ近くに置かれるとしても、被覆を必要としない。
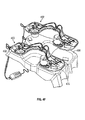
図15は、モジュール式手術用トレイまたは装置1510の別の実施形態を示す。手術用トレイ1510は使い捨て部分1502と再利用可能ベース部分1504とを含む。手術用トレイ1510は吸引および注入モジュール1223、1222をさらに含む。図15は、システムの再利用可能な態様と別個の1つまたは複数の使い捨て構成要素を有する別の例を示す。再利用可能な部分(いくつかの実施形態では、ベース1504であり、それはディスプレイ118を含む)は無菌ドレープを掛けられ得、またはそれらは、例えば、使い捨て部分1502、1222、1223のいくつかまたは全てと一体化され得るか別個の構成要素として提供され得る薄い真空形成または成形されたプラスチックシェルによって、無菌バリヤを維持するために覆われ得る。いくつかの実施形態では、使い捨て部分1502は、図15に示されるようなハンドピースユニットのことを単に指すために使用され得る。いくつかの実施形態では、しかしながら、手術用トレイ1510の全ての使い捨て構成要素またはモジュールは、集合的に使い捨て部分と称され得る(例えば、ユニット1502、注入モジュール1222、および吸引モジュール1223)。
本明細書に開示される手術用システムのいくつかの実施形態は、多くの手術で利用されるBSSボトルまたは他の注入源に適用されるような無菌移動筐体を含む。1つの例が図17A〜17Cに示され、ここでは非無菌BSSボトル1704が無菌BSSホルダ1700内に封じ込められ、ボトルスパイク1708が無菌作業領域内に配置されている。そのような実施形態は、非無菌BSSボトルが無菌領域に持ち込まれることを可能にし、これは現在の解決策に勝る優れた性能を提供し得る。なぜなら、注入源(BSSボトル)と手術部位との間の流体チューブ長さが低減されるためである。
ぜん動ポンプは流体をポンピングするために様々な外科的処置で利用され得る。いくつかの実施形態では、ぜん動ポンプは、酸化エチレン滅菌などのガス滅菌に対応するように構成または設計される。ガスがぜん動ポンプで使用されるチューブに出入りすることを可能にするために、ガスが流入または流出するための進入路も排出路もないようにチューブの一区画または一部分を効果的に捕捉する多数の閉塞「狭窄地点」を回避することが望ましい。これは例えば、2つ以上の位置でチューブを狭窄する3つ以上のローラを有するぜん動ポンプで起こり得る。本明細書に開示される実施形態は、ポンプが滅菌位置または構成を含むことを可能にするように構成された1つまたは複数のローラ(または1つもしくは複数のローラと同じ目的を果たす構成要素)を有するぜん動ポンプまたはポンプヘッドを含む。滅菌位置または構成では、最大で1つの狭窄地点が形成され(いくつかの実施形態では零の狭窄地点)、チューブの「捕捉された」部分が一切ない状態でガス滅菌が実行されることが可能になる。ポンプはポンピング位置、すなわち作動位置または構成も含み得、これは好ましくは滅菌後に利用され、この際、1つより多くの同時狭窄地点が形成される一方で、ポンプは流体をポンピングするために使用されている。例えば、いくつかの実施形態は、2つのローラまたは1つのローラ(または1つもしくは複数のローラと同じ目的を果たす構成要素)を含み、その結果、チューブの最大で1つの部分が、滅菌構成において常に狭窄されるようにする。いくつかの実施形態は、チューブのわずか1つの部分が少なくとも1つの構成(例えば滅菌構成)において狭窄されるようにポンプが構成可能である限り、2つよりも多くのローラさえ含み得る。ポンプ設計は、1つのローラのみが滅菌構成においてチューブと係合されるように組立ての間に適切な位置合わせを保証するキー溝および/または他の特徴部を含み得る。例として図18を参照のこと。図18は、チューブ1808を同時に2箇所で狭窄できる2つのローラ1806を含むがローラ1806はロータ1804が特定の位置(例えば、ロータ1804が図18に示される位置)にある場合、狭窄地点が1箇所のみに形成されるように配置されている。従って、そのようなポンプは、手術で使用する前にガス滅菌を可能にする「ホーム」「開始」または滅菌位置として図18に示される位置または構成を使用するように構成され得る。
ある実施形態において、本明細書に示される手術用システムは、前眼房外科的処置、例えば水晶体または白内障除去(一般に水晶体超音波乳化吸引術または水晶体細片除去術として知られる)用に構成可能である。手術用システムは、ハンドピース、コンソール、手術用トレイ、ディスプレイ、フットペダルのうちの1つまたは複数を含むことができる。
ある実施形態において、システムは、外科医によって保持されるハンドピースを含み、その遠位端は小さい切開を介して目の前眼房に挿入される。ハンドピースの遠位端は目に挿入可能であり、例えば、サイズ17、18、19、20、21、22、23、24、25、26または27ゲージの、またはいくつかの場合にはより大きいまたは小さいゲージの皮下注射針、チューブ、カニューレ、またはトロカールであることができ、ステンレス鋼、チタニウム、プラスチック、ポリイミドまたはそれらに類する材料を含む多様な材料のいずれかから作製可能である。
なお、本発明の実施形態として、以下の参考例8ないし20も想定される。
[参考例8]
外科的処置の間、外科医が使用するための手術用装置であって、
外科的処置の前に開封され、かつ単回または制限された回数の外科的処置後に処分されるように構成された1つまたは複数の密封された滅菌済み手術パックを含み、前記1つまたは複数の密封された滅菌済み手術パックが、
無菌手術器具、および
前記外科的処置の無菌領域の一部であるように構成された上面と、再利用可能な支持構造体の上面に結合されかつ前記上面よって支持されるようにサイズを決められかつ構成された底面とを含む無菌手術用トレイであって、前記再利用可能な支持構造体が、モータ、光源、使用者インターフェースディスプレイ、動力源、およびコンピュータプロセッサのうちの少なくとも1つを含む、無菌手術用トレイ
を含み、
前記無菌手術用トレイが、前記支持構造体の前記モータから、前記無菌手術用トレイに接続された流体ポンプへ回転運動を伝達するための機械的結合部、前記支持構造体の前記光源から前記無菌手術器具へ光を伝送するための光伝送結合部、透明材料であって、前記支持構造体の前記使用者インターフェースディスプレイを前記外科的処置の前記無菌領域で前記透明材料を通して見ることを可能にするように配置された透明材料、前記支持構造体の前記動力源から前記無菌手術用トレイへ電力を送るための電気的結合部、および前記コンピュータプロセッサから前記無菌手術用トレイへ電気通信を送信するための電気通信結合部のうちの少なくとも1つを含む、手術用装置。
[参考例9]
前記1つまたは複数の密封された滅菌済み手術パックがさらに、前記無菌手術用トレイの前記底面と、前記再利用可能な支持構造体の前記上面との間に配置されるようにサイズを決められた無菌ドレープを含む、参考例8に記載の手術用装置。
[参考例10]
前記無菌ドレープが、電流が前記再利用可能な支持構造体から前記無菌手術用トレイへ流れることを可能にするように構成された伝導性インターフェースを含む、参考例9に記載の手術用装置。
[参考例11]
前記再利用可能な支持構造体が非無菌である、参考例8〜10のいずれか一例に記載の手術用装置。
[参考例12]
前記無菌手術用トレイが、折り畳まれた輸送用構成と、展開された手術時使用構成とを含む、参考例8〜11のいずれか一例に記載の手術用装置。
[参考例13]
前記無菌手術用トレイの少なくとも一部が、前記折り畳まれた輸送用構成において、前記無菌手術ツールを損傷から保護するように構成される、参考例12に記載の手術用装置。
[参考例14]
前記再利用可能な支持構造体が前記モータを含み、前記1つまたは複数の密封された滅菌済み手術パックがさらに無菌ポンプモジュールを含み、および前記無菌ポンプモジュールは前記無菌手術用トレイから分離し、かつ前記再利用可能な支持構造体に別々に結合されかつ前記再利用可能な支持構造体によって支持されるように構成され、前記無菌ポンプモジュールが、前記モータから前記ポンプモジュールの流体ポンプへ回転運動を伝達するための回転結合部を含む、参考例8〜13のいずれか一例に記載の手術用装置。
[参考例15]
外科的処置の間、外科医が使用するための手術用装置であって、
外科的処置の前に開封され、かつ単回または制限された回数の外科的処置後に処分されるように構成された1つまたは複数の密封された滅菌済み手術パックであって、無菌注入モジュールおよび無菌吸引モジュールの1つまたは複数を含む、1つまたは複数の密封された滅菌済み手術パック
を含み、前記無菌注入および吸引モジュールがそれぞれ、
再利用可能な支持構造体の凹部に取外し可能に受け入れられるようにサイズを決められかつ構成された壁と、前記外科的処置の無菌領域の一部であるように構成された少なくとも1つの外側表面とを含むハウジングと、
流体を手術部位へまたは手術部位からポンピングするためのポンプと、
前記ポンプのロータを回転させるために前記ポンプに結合されたモータと
を含み、
前記ハウジングがさらに、前記モータに動力供給するために前記再利用可能な支持構造体から電力を受け取るように構成された電気的インターフェースを含み、
前記無菌注入モジュールが、流体を前記手術部位へポンピングするように構成され、および前記無菌吸引モジュールが、流体を前記手術部位からポンピングするように構成される、手術用装置。
[参考例16]
前記1つまたは複数の密封された滅菌済み手術パックが、前記無菌注入モジュールおよび前記無菌吸引モジュールのそれぞれの少なくとも1つを含む、参考例15に記載の手術用装置。
[参考例17]
前記ポンプが滅菌構成を含み、前記滅菌構成では最大で1つの狭窄地点が前記ポンプのぜん動チューブに形成される、参考例15または16に記載の手術用装置。
[参考例18]
前記1つまたは複数の密封された滅菌済み手術パックがさらに、
無菌手術器具と、
前記外科的処置の前記無菌領域の一部であるように構成された上面を含む無菌手術器具ホルダと
を含み、前記上面は前記無菌手術器具をその中にまたはその上に配置するための受入部分を含み、前記無菌手術器具ホルダはさらに、前記再利用可能な支持構造体の異なる凹部に受け入れられるようにサイズを決められかつ構成された底面を含む、参考例15〜17のいずれか一例に記載の手術用装置。
[参考例19]
前記無菌手術器具が、前記再利用可能な支持構造体の光源、前記再利用可能な支持構造体の電子制御装置、前記再利用可能な支持構造体の機械的駆動装置、前記再利用可能な支持構造体の空気圧駆動装置、および前記再利用可能な支持構造体の流体駆動装置のうちの1つまたは複数と結合するように構成される、参考例18に記載の手術用装置。
[参考例20]
前記再利用可能な支持構造体が非無菌であり、および前記1つまたは複数の密封された滅菌済み手術パックがさらに、前記非無菌の再利用可能な支持構造体と、前記モジュールのうちの少なくとも1つとの間に配置されるように構成された手術用ドレープを含む、参考例15〜19のいずれか一例に記載の手術用装置。
Claims (7)
- 外科的処置の間、外科医が使用するための手術用装置であって、
外科的処置の前に開封され、かつ単回または制限された回数の外科的処置後に処分されるように構成された1つまたは複数の密封された滅菌済み手術パックを含み、前記1つまたは複数の密封された滅菌済み手術パックが、
無菌手術器具、および
前記外科的処置の無菌領域の一部であるように構成された上面と、再利用可能な支持構造体の上面に結合されかつ前記上面よって支持されるようにサイズを決められかつ構成された底面とを含む無菌手術用トレイであって、前記再利用可能な支持構造体が、モータ、光源、使用者インターフェースディスプレイ、動力源、およびコンピュータプロセッサのうちの少なくとも1つを含む、無菌手術用トレイ
を含み、
前記無菌手術用トレイが、前記支持構造体の前記モータから、前記無菌手術用トレイに接続された流体ポンプへ回転運動を伝達するための機械的結合部、前記支持構造体の前記光源から前記無菌手術器具へ光を伝送するための光伝送結合部、透明材料であって、前記支持構造体の前記使用者インターフェースディスプレイを前記外科的処置の前記無菌領域で前記透明材料を通して見ることを可能にするように配置された透明材料、前記支持構造体の前記動力源から前記無菌手術用トレイへ電力を送るための電気的結合部、および前記コンピュータプロセッサから前記無菌手術用トレイへ電気通信を送信するための電気通信結合部のうちの少なくとも1つを含む、手術用装置。 - 前記1つまたは複数の密封された滅菌済み手術パックがさらに、前記無菌手術用トレイの前記底面と、前記再利用可能な支持構造体の前記上面との間に配置されるようにサイズを決められた無菌ドレープを含む、請求項1に記載の手術用装置。
- 前記無菌ドレープが、電流が前記再利用可能な支持構造体から前記無菌手術用トレイへ流れることを可能にするように構成された伝導性インターフェースを含む、請求項2に記載の手術用装置。
- 前記再利用可能な支持構造体が非無菌である、請求項1〜3のいずれか一項に記載の手術用装置。
- 前記無菌手術用トレイが、折り畳まれた輸送用構成と、展開された手術時使用構成とを含む、請求項1〜4のいずれか一項に記載の手術用装置。
- 前記無菌手術用トレイの少なくとも一部が、前記折り畳まれた輸送用構成において、前記無菌手術器具を損傷から保護するように構成される、請求項5に記載の手術用装置。
- 前記再利用可能な支持構造体が前記モータを含み、前記1つまたは複数の密封された滅菌済み手術パックがさらに無菌ポンプモジュールを含み、および前記無菌ポンプモジュールは前記無菌手術用トレイから分離し、かつ前記再利用可能な支持構造体に別々に結合されかつ前記再利用可能な支持構造体によって支持されるように構成され、前記無菌ポンプモジュールが、前記モータから前記無菌ポンプモジュールの流体ポンプへ回転運動を伝達するための回転結合部を含む、請求項1〜6のいずれか一項に記載の手術用装置。
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201461990021P | 2014-05-07 | 2014-05-07 | |
| US61/990,021 | 2014-05-07 | ||
| PCT/US2014/067717 WO2015081262A1 (en) | 2013-11-28 | 2014-11-26 | Ophtalmic surgical systems, methods, and devices |
| US14/554,865 | 2014-11-26 | ||
| US14/554,865 US10537472B2 (en) | 2013-11-28 | 2014-11-26 | Ophthalmic surgical systems, methods, and devices |
| USPCT/US2014/067717 | 2014-11-26 | ||
| US201462091384P | 2014-12-12 | 2014-12-12 | |
| US62/091,384 | 2014-12-12 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016566199A Division JP6546196B2 (ja) | 2014-05-07 | 2015-01-29 | 眼科手術システム、方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019193810A JP2019193810A (ja) | 2019-11-07 |
| JP6761076B2 true JP6761076B2 (ja) | 2020-09-23 |
Family
ID=54392825
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016566199A Active JP6546196B2 (ja) | 2014-05-07 | 2015-01-29 | 眼科手術システム、方法および装置 |
| JP2019110216A Active JP6761076B2 (ja) | 2014-05-07 | 2019-06-13 | 眼科手術システム、方法および装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016566199A Active JP6546196B2 (ja) | 2014-05-07 | 2015-01-29 | 眼科手術システム、方法および装置 |
Country Status (10)
| Country | Link |
|---|---|
| EP (1) | EP3119358B1 (ja) |
| JP (2) | JP6546196B2 (ja) |
| KR (1) | KR20170002533A (ja) |
| CN (1) | CN106456366B (ja) |
| AU (1) | AU2015256600B2 (ja) |
| CA (1) | CA2946536C (ja) |
| ES (1) | ES2774926T3 (ja) |
| MX (1) | MX2016014363A (ja) |
| RU (1) | RU2682485C2 (ja) |
| WO (1) | WO2015171189A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114569326A (zh) * | 2017-05-04 | 2022-06-03 | 卡尔蔡司白内障医疗技术公司 | 用于眼外科手术的装置和方法 |
| US11045353B2 (en) | 2017-05-24 | 2021-06-29 | Alcon Inc. | Ophthalmic surgical system with infusion fluid and substance delivery through an infusion cannula |
| CN113710209A (zh) | 2019-02-01 | 2021-11-26 | 卡尔蔡司白内障医疗技术公司 | 具有集成抽吸泵的眼科切割器械 |
| US20220391727A1 (en) | 2019-10-24 | 2022-12-08 | Nec Corporation | Analysis apparatus, control method, and program |
| RU196560U1 (ru) * | 2019-11-15 | 2020-03-04 | федеральное государственное автономное образовательное учреждение высшего образования Первый Московский государственный медицинский университет имени И.М. Сеченова Министерства здравоохранения Российской Федерации (Сеченовский университет) (ФГАОУ ВО Первый МГМУ им. И.М. Сеченова Минздрава России (Се | Устройство для удаления зубных отложений с озонированием контактной среды |
| CN113406016B (zh) * | 2021-06-15 | 2022-11-04 | 江西师范大学 | 基于fbg的压力蒸汽灭菌器气体质量的监测装置和监测方法 |
| CN113520606B (zh) * | 2021-08-11 | 2023-03-24 | 上海微创医疗机器人(集团)股份有限公司 | 无菌板组件、手术机器人及手术机器人系统 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7699855B2 (en) * | 1996-12-12 | 2010-04-20 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| US6102044A (en) * | 1999-10-08 | 2000-08-15 | Medical Concepts Development, Inc. | Electrode carrying surgical drape and method |
| JP5043414B2 (ja) * | 2005-12-20 | 2012-10-10 | インテュイティブ サージカル インコーポレイテッド | 無菌外科手術アダプタ |
| US8262553B2 (en) * | 2006-09-18 | 2012-09-11 | Novartis Ag | Ophthalmic surgical console system |
| ES2606506T3 (es) * | 2007-04-20 | 2017-03-24 | Doheny Eye Institute | Aparato quirúrgico |
| US20100174415A1 (en) * | 2007-04-20 | 2010-07-08 | Mark Humayun | Sterile surgical tray |
| US8568391B2 (en) * | 2007-04-20 | 2013-10-29 | Doheny Eye Institute | Sterile surgical tray |
| US7886743B2 (en) * | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| CN102469929B (zh) * | 2009-12-04 | 2014-12-10 | 奥林巴斯医疗株式会社 | 手持式无线内窥镜 |
| US8858492B2 (en) * | 2010-05-26 | 2014-10-14 | Bausch & Lomb Incorporated | Ophthalmic surgery kits for priming tubes for ophthalmic surgical procedures |
| ES2774162T3 (es) * | 2012-08-06 | 2020-07-17 | Alcon Pharmaceuticals Ltd | Paño quirúrgico estéril para cirugía oftálmica |
-
2015
- 2015-01-29 CA CA2946536A patent/CA2946536C/en active Active
- 2015-01-29 WO PCT/US2015/013567 patent/WO2015171189A1/en active Application Filing
- 2015-01-29 EP EP15789716.6A patent/EP3119358B1/en active Active
- 2015-01-29 CN CN201580023705.8A patent/CN106456366B/zh active Active
- 2015-01-29 KR KR1020167033681A patent/KR20170002533A/ko not_active Application Discontinuation
- 2015-01-29 JP JP2016566199A patent/JP6546196B2/ja active Active
- 2015-01-29 AU AU2015256600A patent/AU2015256600B2/en active Active
- 2015-01-29 ES ES15789716T patent/ES2774926T3/es active Active
- 2015-01-29 MX MX2016014363A patent/MX2016014363A/es unknown
- 2015-01-29 RU RU2016147683A patent/RU2682485C2/ru not_active IP Right Cessation
-
2019
- 2019-06-13 JP JP2019110216A patent/JP6761076B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3119358A4 (en) | 2018-05-16 |
| ES2774926T3 (es) | 2020-07-23 |
| CA2946536A1 (en) | 2015-11-12 |
| MX2016014363A (es) | 2017-03-09 |
| RU2016147683A3 (ja) | 2018-08-28 |
| RU2016147683A (ru) | 2018-06-08 |
| CN106456366B (zh) | 2019-11-05 |
| KR20170002533A (ko) | 2017-01-06 |
| EP3119358A1 (en) | 2017-01-25 |
| EP3119358B1 (en) | 2019-12-04 |
| JP6546196B2 (ja) | 2019-07-17 |
| JP2019193810A (ja) | 2019-11-07 |
| JP2017514604A (ja) | 2017-06-08 |
| WO2015171189A1 (en) | 2015-11-12 |
| CA2946536C (en) | 2023-01-10 |
| AU2015256600A1 (en) | 2016-11-17 |
| RU2682485C2 (ru) | 2019-03-19 |
| CN106456366A (zh) | 2017-02-22 |
| AU2015256600B2 (en) | 2020-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220175484A1 (en) | Ophthalmic surgical systems, methods, and devices | |
| CN110338968B (zh) | 眼外科手术系统、方法和装置 | |
| JP6761076B2 (ja) | 眼科手術システム、方法および装置 | |
| JP6542317B2 (ja) | 無菌手術トレイ | |
| JP5437386B2 (ja) | 外科用無菌トレイ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190613 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190613 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20200313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20200313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200722 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200804 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200903 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6761076 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |