JP6717536B2 - 折れ線作画装置 - Google Patents
折れ線作画装置 Download PDFInfo
- Publication number
- JP6717536B2 JP6717536B2 JP2019557900A JP2019557900A JP6717536B2 JP 6717536 B2 JP6717536 B2 JP 6717536B2 JP 2019557900 A JP2019557900 A JP 2019557900A JP 2019557900 A JP2019557900 A JP 2019557900A JP 6717536 B2 JP6717536 B2 JP 6717536B2
- Authority
- JP
- Japan
- Prior art keywords
- point
- representative
- polygonal line
- points
- local area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G06T11/23—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
- G06T17/05—Geographic models
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Remote Sensing (AREA)
- Computer Graphics (AREA)
- Processing Or Creating Images (AREA)
- Image Generation (AREA)
Description
1.点群データから等高線を作成する高さの位置を基準位置線とし、基準位置線に対して上方位置線及び下方位置線を定め、上方層及び下方層の二つの層を形成する。
2.上方層に属する点群データと下方層に属する点群データとの間の2点を最短距離で結ぶ直線を算出し、この直線と基準位置線との交点を求める。従って、直線及び交点は複数算出される。
3.上記2.で得た交点を順次接続する。接続では、いずれかの交点を端点(開始点)とし、線の端点から最短距離にあたる点を直線でつなぐことを繰り返す。ただし、既に接続された点は対象としないこととし、かつ、接続した前の二点の延長線上からある範囲の角度と距離内にある場合のみ接続する。
(1)計算量が比較的多いため、等高線の作画及び表示に時間がかかる。
(2)点群データの質によっては等高線がぎざぎざになってしまい、視認性が低下する。
上記(1)の計算量が比較的多いという問題点は次の理由からである。すなわち、特許文献1の技術では、点群データを上方層と下方層に分けた後、上方層に属する点と、下方層に属する点を最短距離で結ぶ直線を算出する。この処理では、どちらかの層に属する点1点に対し、もう片方の層で最近傍探索処理を行う必要がある。さらに、算出した直線と基準位置線との交点を求める処理も必要である。これらの処理により、計算量が比較的多くなってしまう。
また、上記(2)の等高線がぎざぎざになるという問題点は次の理由によるものである。すなわち、特許文献1の技術では、入力された点群データ内の点のいくつかを接続して等高線を作画する。点群データ内に、計測誤差の大きい点やノイズが含まれる場合は、これらの点を接続することで、出力である等高線がぎざぎざになってしまう。また、前述の外れ点を含まなかったり、外れ点を何らかの方法で除去できたりしたとしても、複雑な形状をもつ3次元点群データでは、やはり等高線がぎざぎざになってしまう。
実施の形態1.
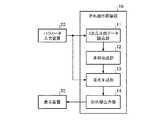
図1は、本実施の形態による折れ線作画装置とその周辺機器の構成図である。
折れ線作画装置10は、3次元点群データ読込部11、点群抽出部12、頂点生成部13、折れ線出力部14を備える。3次元点群データ読込部11は、折れ線を作画する元となる3次元点群データを折れ線作画装置10に読み込む機能を有している。点群抽出部12は、3次元点群データ読込部11によって読み込まれた3次元点群データから折れ線を作画する対象となる点群を抽出する機能を有している。頂点生成部13は、点群に局所領域を定め、局所領域の点群の分布状態を示す点を代表点として求めると共に、求めた代表点を基準として新たな局所領域を定め、新たな局所領域の点群の分布状態を示す点を新たな代表点として求める処理を、対象となる点群のうち、いずれの局所領域にも含まれない点が存在しなくなるまで行う機能を有している。折れ線出力部14は、頂点生成部で求めた全ての代表点を順に接続して折れ線を作画する機能を有している。
周辺機器のパラメータ入力装置20は、キーボード及びマウス等の入力機器からなり、折れ線を作画する高さなどのパラメータをユーザが入力するための装置である。また、表示装置30は、折れ線出力部14から出力された折れ線等のデータを表示する装置であり、例えば液晶ディスプレイで構成される。
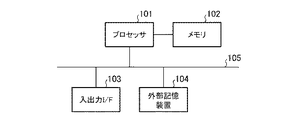
折れ線作画装置はコンピュータを用いて実現されており、プロセッサ101、メモリ102、入出力インタフェース(入出力I/F)103、外部記憶装置104、バス105を備えている。プロセッサ101は、3次元点群データ読込部11〜折れ線出力部14の機能に対応したそれぞれのプログラムをメモリ102に読み込んで実行することにより、3次元点群データ読込部11〜折れ線出力部14を構成する。メモリ102は、各種データを記憶すると共に、プロセッサ101の作業領域を構成する。入出力インタフェース103は、パラメータ入力装置20及び表示装置30との信号または他の周辺機器との信号をやり取りするためのインタフェースである。外部記憶装置104は、3次元点群データ読込部11〜折れ線出力部14のそれぞれの機能に対応したプログラムを格納すると共に、各種のデータを記憶するための記憶装置である。バス105は、プロセッサ101、入出力インタフェース103、外部記憶装置104を相互に通信接続するための信号路である。
等高線を作画する元となる3次元点群データは外部記憶装置104に格納され、これを3次元点群データ読込部11が読み込んでメモリ102に格納する。パラメータ入力装置20より、等高線を作画する高さなどのパラメータが入力された場合、このパラメータは入出力インタフェース103を介してメモリ102に記憶される。なお、パラメータの入力としては、例えば、キーボードを用いて数値を入力したり、マウスを用いて目的の高さを持つ点を画面上でクリックしたりする。
また、上記例では、局所領域の点群の分布状態を示す点として、局所領域の重心を代表点として求めたが、これに限定されるものではない。例えば、領域内の点の各軸座標について中央値をとり、それら中央値を座標とする点を代表点としてもよい。それ以外にも、点の分布モデルが既知ならば、そのようなモデルを当てはめ、分布のピーク位置を代表点の座標とすることも可能である。
さらに、上記例では、局所領域を新たな代表点が中心となるよう移動させたが、必ずしも中心となるように移動させなくてもよい。例えば、局所領域内の点群に直線をフィッティングし、局所領域をその直線に沿って一定量だけ移動させる、といった処理であってもよい。
実施の形態1では、特定の高さかつ座標平面(例えばXY平面)に平行な等高線を引くことを目的としている。一方で、アプリケーションによっては、前述の条件に当てはまらない、3次元的な線を作図することが必要な場合がある。例えば、3次元点群データを特定の平面(座標平面と平行でない)で切断したときの断面の輪郭線を作図したり、ドローンなどの移動体の位置を一定時間間隔で取得し3次元空間中にプロットしたデータから移動軌跡を作図したりする場合がある。その他にも、モービルマッピングシステムを用いて取得した道路周辺の3次元点群データから、色情報や反射強度情報を用いて白線領域の点のみを抽出し、抽出された点群をもとに白線を作図する応用も考えられる。このような例を実施の形態2として次に説明する。
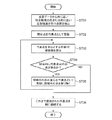
図4は、その処理を示すフローチャートである。
点群抽出部12では、3次元点群データ読込部11で読み込まれた点群データのうち、座標平面と平行でない特定の平面で切断したときの断面の一定範囲の点群だけを抽出する(ステップST11)。以降では、このように抽出された3次元点群を抽出点群と記す。
点群抽出部12では、3次元点群データ読込部11で読み込まれた点群データのうち、作画に不要な点群を取り除いた移動軌跡の点群だけを抽出する(ステップST21)。例えば、移動軌跡から明らかな外れ点を除去した移動軌跡の点群データを求める。以降では、このように抽出された3次元点群を抽出点群と記す。
点群抽出部12では、3次元点群データ読込部11で読み込まれた点群データのうち、白に近い特定範囲の色または白に近い反射強度を持つ点群だけを抽出する(ステップST31)。これにより、白線領域の点のみを抽出することができる。以降では、このように抽出された3次元点群を抽出点群と記す。
実施の形態3は、頂点生成部13が、代表点を基準とした局所領域を定める際、局所領域の形状及び範囲のうち少なくともいずれか一方の値を、繰り返しの度に変更するようにした例である。折れ線作画装置における図面上の構成は図1及び図2と同様であるため、これらの図を用いて説明する。
実施の形態4は、頂点生成部13が、代表点を基準とした局所領域を定める際、局所領域に含まれる外れ点を除外した後に新たな代表点を定めるようにしたものである。折れ線作画装置における図面上の構成は図1及び図2と同様であるため、これらの図を用いて説明する。
Claims (7)
- 折れ線を作画する対象となる点群を抽出する点群抽出部と、
前記対象となる点群に局所領域を定め、当該局所領域の点群における点について算出された重心に位置する点を代表点として求めると共に当該重心に位置する点を求めた局所領域内に存在する前記代表点以外の点を取り除き、当該求めた代表点を中心とした円領域を新たな局所領域と定め、当該新たな局所領域の点群における点について算出された重心に位置する点を新たな代表点として求める頂点生成部と、
前記頂点生成部で求めた全ての代表点を順に接続して折れ線を作画する折れ線出力部とを備えたことを特徴とする折れ線作画装置。 - 折れ線を作画する対象となる点群を抽出する点群抽出部と、
前記対象となる点群に局所領域を定め、当該局所領域の点群の分布状態を示す点を代表点として求めると共に、前記局所領域の点群の点に対する当該局所領域の中心までの距離を算出し、当該求めた代表点を基準として前記算出された距離の統計量を用いて前記局所領域の形状及び範囲のうち少なくともいずれか一方の値を変更して新たな局所領域を定め、当該新たな局所領域の点群の分布状態を示す点を新たな代表点として求める頂点生成部と、
前記頂点生成部で求めた全ての代表点を順に接続して折れ線を作画する折れ線出力部とを備えたことを特徴とする折れ線作画装置。 - 折れ線を作画する対象となる点群を抽出する点群抽出部と、
前記対象となる点群に局所領域を定め、当該局所領域の点群における点について算出された重心に位置する点を代表点として求めると共に、当該重心に位置する点を求めた局所領域の点群の点に対する当該局所領域の中心までの距離を算出し、当該重心を求めた局所領域内に存在する前記代表点以外の点を取り除き、当該求めた代表点を中心として前記算出された距離の統計量を用いて半径が設定された円領域を新たな局所領域と定め、当該新たな局所領域の点群における点について算出された重心に位置する点を新たな代表点として求める頂点生成部と、
前記頂点生成部で求めた全ての代表点を順に接続して折れ線を作画する折れ線出力部とを備えたことを特徴とする折れ線作画装置。 - 折れ線を作画する対象となる点群を抽出する点群抽出部と、
前記対象となる点群に局所領域を定め、当該局所領域内の点群の各点について、当該局所領域内の最近傍点までの距離を算出し、当該最近傍点までの距離が閾値よりも大きい場合に外れ点とし、当該局所領域内の点群から当該外れ点を除外した点群の分布状態を示す点を代表点として求めると共に、当該求めた代表点を基準として新たな局所領域を定め、当該新たな局所領域の点群の各点について、当該新たな局所領域内の最近傍点までの距離を算出し、当該最近傍点までの距離が閾値よりも大きい場合に外れ点とし、当該新たな局所領域の点群から当該外れ点を除外した点群の分布状態を示す点を新たな代表点として求める頂点生成部と、
前記頂点生成部で求めた全ての代表点を順に接続して折れ線を作画する折れ線出力部とを備えたことを特徴とする折れ線作画装置。 - 折れ線を作画する対象となる点群を抽出する点群抽出部と、
前記対象となる点群に局所領域を定め、当該局所領域内の点群の各点について、当該局所領域内の最近傍点までの距離を算出し、当該最近傍点までの距離が閾値よりも大きい場合に外れ点とし、当該局所領域内の点群から当該外れ点を除外した点群における点について算出された重心に位置する点を代表点として求めると共に当該重心に位置する点を求めた局所領域内に存在する前記代表点以外の点を取り除き、当該求めた代表点を中心とした円領域を新たな局所領域を定め、当該新たな局所領域の点群の各点について、当該新たな局所領域内の最近傍点までの距離を算出し、当該最近傍点までの距離が閾値よりも大きい場合に外れ点とし、当該新たな局所領域の点群から当該外れ点を除外した点群における点について算出された重心に位置する点を新たな代表点として求める頂点生成部と、
前記頂点生成部で求めた全ての代表点を順に接続して折れ線を作画する折れ線出力部とを備えたことを特徴とする折れ線作画装置。 - 前記頂点生成部は、前記新たな局所領域の新たな代表点を求める処理を、前記対象となる点群のうち、いずれの新たな局所領域にも含まれない点が存在しなくなるまで行うことを特徴とする請求項1から請求項5のいずれかに記載の折れ線作画装置。
- 前記点群抽出部は、3次元の点群のうち、1次元の座標を所定範囲として、当該所定範囲内の点群を抽出することを特徴とする請求項1から請求項6のいずれかに記載の折れ線作画装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/043655 WO2019111323A1 (ja) | 2017-12-05 | 2017-12-05 | 折れ線作画装置及び折れ線作画方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019111323A1 JPWO2019111323A1 (ja) | 2020-05-28 |
| JP6717536B2 true JP6717536B2 (ja) | 2020-07-01 |
Family
ID=66751339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019557900A Active JP6717536B2 (ja) | 2017-12-05 | 2017-12-05 | 折れ線作画装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200242819A1 (ja) |
| JP (1) | JP6717536B2 (ja) |
| WO (1) | WO2019111323A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11908164B2 (en) * | 2021-07-23 | 2024-02-20 | Embark Trucks Inc. | Automatic extrinsic calibration using sensed data as a target |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6013962B2 (ja) * | 2013-03-28 | 2016-10-25 | 株式会社パスコ | 地物表面検出装置、地物表面検出方法、及びプログラム |
-
2017
- 2017-12-05 JP JP2019557900A patent/JP6717536B2/ja active Active
- 2017-12-05 WO PCT/JP2017/043655 patent/WO2019111323A1/ja not_active Ceased
-
2020
- 2020-04-17 US US16/852,141 patent/US20200242819A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20200242819A1 (en) | 2020-07-30 |
| JPWO2019111323A1 (ja) | 2020-05-28 |
| WO2019111323A1 (ja) | 2019-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10268917B2 (en) | Pre-segment point cloud data to run real-time shape extraction faster | |
| US12159472B2 (en) | Building datum extraction from laser scanning data | |
| US11295522B2 (en) | Three-dimensional (3D) model creation and incremental model refinement from laser scans | |
| CN113378760A (zh) | 训练目标检测模型和检测目标的方法及装置 | |
| JP2022548743A (ja) | 移動ロボットの障害物情報感知方法、装置 | |
| JP2021185408A (ja) | ビルブロックデータのマージに関する方法、装置、電子デバイス、コンピュータ可読記憶媒体及びコンピュータプログラム | |
| CN114708382B (zh) | 基于增强现实的三维建模方法、装置、存储介质、设备 | |
| US12106438B2 (en) | Point cloud annotation device, method, and program | |
| US10015466B2 (en) | Spatial information visualization apparatus, storage medium, and spatial information visualization method | |
| CN114495034B (zh) | 一种目标检测效果可视化的方法、装置、设备及存储介质 | |
| JP2013536502A (ja) | マルチスケール3次元配向 | |
| CN112904369B (zh) | 机器人重定位方法、装置、机器人和计算机可读存储介质 | |
| CN117708942A (zh) | 一种建筑三维模型的图纸生成方法、装置、设备及介质 | |
| US8587586B2 (en) | Electronic device and method for meshing curved surface | |
| US10712473B2 (en) | Weather data processing apparatus and method using weather radar | |
| JP6717536B2 (ja) | 折れ線作画装置 | |
| WO2023169337A1 (zh) | 目标物速度的估计方法及装置、车辆和存储介质 | |
| CN115760878A (zh) | 三维图像实体分割方法、装置、设备、存储介质及车辆 | |
| CN114549752A (zh) | 三维图形数据处理方法、装置、设备、存储介质及产品 | |
| JP2021089158A (ja) | 風向風速推定装置、風向風速推定方法、および風向風速推定プログラム | |
| CN117115371A (zh) | 一种高精地图的绘制方法、系统、电子设备及存储介质 | |
| CN112596659B (zh) | 一种基于智能语音和图像处理的绘画方法和装置 | |
| CN116664809A (zh) | 三维信息获取方法、装置、计算机设备、存储介质和产品 | |
| CN114511660A (zh) | 可视化场景内部物体检测方法 | |
| JP7797043B1 (ja) | モデル生成装置、モデル生成方法、及びモデル生成プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200204 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200204 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200422 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200609 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6717536 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |