JP6692301B2 - 低侵襲手術用の再構成可能なロボットアーキテクチャ - Google Patents
低侵襲手術用の再構成可能なロボットアーキテクチャ Download PDFInfo
- Publication number
- JP6692301B2 JP6692301B2 JP2016574956A JP2016574956A JP6692301B2 JP 6692301 B2 JP6692301 B2 JP 6692301B2 JP 2016574956 A JP2016574956 A JP 2016574956A JP 2016574956 A JP2016574956 A JP 2016574956A JP 6692301 B2 JP6692301 B2 JP 6692301B2
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- actuator
- end effector
- arc
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000002324 minimally invasive surgery Methods 0.000 title description 25
- 239000012636 effector Substances 0.000 claims description 57
- 239000003550 marker Substances 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 3
- VQKWAUROYFTROF-UHFFFAOYSA-N arc-31 Chemical compound O=C1N(CCN(C)C)C2=C3C=C4OCOC4=CC3=NN=C2C2=C1C=C(OC)C(OC)=C2 VQKWAUROYFTROF-UHFFFAOYSA-N 0.000 description 9
- 230000008878 coupling Effects 0.000 description 9
- 238000010168 coupling process Methods 0.000 description 9
- 238000005859 coupling reaction Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 238000001356 surgical procedure Methods 0.000 description 8
- 210000003484 anatomy Anatomy 0.000 description 7
- 230000003287 optical effect Effects 0.000 description 5
- 230000006378 damage Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000004088 simulation Methods 0.000 description 3
- 238000007675 cardiac surgery Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 241000699670 Mus sp. Species 0.000 description 1
- 208000008589 Obesity Diseases 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 208000022531 anorexia Diseases 0.000 description 1
- 238000013170 computed tomography imaging Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 206010061428 decreased appetite Diseases 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000002357 laparoscopic surgery Methods 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 235000020824 obesity Nutrition 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000002685 pulmonary effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000002966 stenotic effect Effects 0.000 description 1
- 238000007794 visualization technique Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/005—Arms having a curved shape
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/007—Arms the end effector rotating around a fixed point
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/025—Arms extensible telescopic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
Description
(1)"アクチュエータ"、"回転運動"、"軸"、"エンドエフェクタ"、"器具"、"アーム"、"遠隔運動中心"、及び"アーク長"を含むが限定されない専門用語は、本開示の技術分野において理解され、本明細書に例示される通り解釈されるものとする。
(2)"アクチュエータ"という語に対する"ベース"及び"器具"というラベルは、"アクチュエータ"という語へのいかなる追加の限定も規定若しくは示唆することなく、本明細書で記載され請求される異なるアクチュエータを区別する。
(3)"軸"という語に対する"主"、"第二"、及び"長手方向"というラベルは、"軸"という語にいかなる追加の限定も規定若しくは示唆することなく、本明細書に記載され請求される異なる軸を区別する。
(4)"アームセット"という語は、両アクチュエータに接合される若しくは接合されるように構造的に構成される固定長若しくは可変長の支持アーム、並びに器具アクチュエータとエンドエフェクタに接合される若しくは接合されるように構造的に構成される固定長若しくは可変長の器具アームを広く包含する。
(5)"アーム"という語に対する"支持"及び"器具"というラベルは、"アーム"という語へのいかなる追加の限定も規定若しくは示唆することなく、本明細書で記載され請求される異なるアームを区別する。
(6)"接合"という語はいかなる時制でも、部品間の直接的物理的接触若しくは部品の隣接配置を含むいかなるタイプの部品の取り付け(affixation)若しくは取り外し可能な結合(detachable coupling)をも広く包含する。
(7)"アーク構成"という語は、ベースアクチュエータと器具アクチュエータの間のベースアーク長、及び器具アクチュエータとエンドエフェクタの間の拡張アーク長を含む、ベースアクチュエータ、器具アクチュエータ、及びエンドエフェクタの軸の非平行角度配向を広く包含する。
(8)"アーク長"という語に対する"ベース"及び"拡張"というラベルは、"アーク長"という語にいかなる追加の限定も規定若しくは示唆することなく、本明細書で記載され請求される異なるアームを区別する。
(9)"少なくとも部分的に相互交換可能"というフレーズは、両アームがアームセットに固有であるという点で各アームセットが特徴的であるが、各アームを個々に一つ以上の他のアームセットと共有する可能性があり、それによって一つのアームセットと別のアームセットとの相互交換がアームセットの一つ若しくは両方のアームの交換を伴うことを広く包含する。
(1)"ロボットプラットフォーム"、"ワークステーション"、"ピッチ範囲"、"ヨー範囲"、及び"作業空間"を含むが限定されない専門用語は、本開示の技術分野において理解され、本明細書に例示される通り解釈されるものとする。
(2)"ワークステーション"という語の例は、一つ以上のコンピュータデバイス(例えばクライアントコンピュータ、デスクトップ及びタブレット)、ディスプレイ/モニタ、及び一つ以上の入力デバイス(例えばキーボード、ジョイスティック及びマウス)のアセンブリを含むがこれに限定されない。
(3)"コンピュータデバイス"の構造的構成は、プロセッサ、コンピュータ使用可能/コンピュータ可読記憶媒体、オペレーティングシステム、アプリケーションモジュール、周辺デバイスコントローラ、スロット及びポートを含み得るがこれに限定されない。
(4)"アプリケーションモジュール"という語は、特定アプリケーションを実行するための電子回路及び/又は実行可能プログラム(例えば実行可能ソフトウェア及びファームウェア)から成るワークスステーションのコンポーネントを広く包含する。
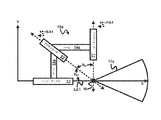
(1)回転軸PA2、RAD及びLA2は遠隔運動中心56において交差する。
(2)支持アーク53のθBのベースアーク長は回転軸PA2とSA2の間に及ぶ。
(3)器具アーク54aの拡張アーク長θE3は回転軸PA2とLA2の間に及ぶ。
(4)遠隔運動中心56に対する作業空間57aは支持アーク53のθB3のベースアーク長と器具アーク54aの拡張アーク長θE3から得られる面及び底寸法を持つ。
(5)アクチュエータ51は作業空間57a内で内視鏡60の遠位端60dの広範な動きを制御するために所望のφ1度にわたって主軸PA2まわりにアーク53及び54aを一緒に回転させるように命令され得る。
(6)アクチュエータ52は作業空間57a内で内視鏡60の遠位端60dの的を絞った動きを制御するために所望のφ2度にわたって第二軸SA2まわりに器具アーク54aを回転させるように命令され得る。
(7)エンドエフェクタ55aはその長手方向軸LA2まわりに内視鏡60を回転させる手動若しくは制御された能力を持つ。
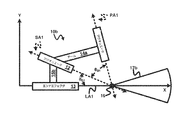
(1)回転軸PA2、RAD、及びLA2は遠隔運動中心56において交差する。
(2)支持アーク53のθBのベースアーク長は回転軸PA2とSA2の間に及ぶ。
(3)器具アーク54bの拡張アーク長θE4は回転軸PA2とLA2の間に及ぶ。
(4)遠隔運動中心56に対する作業空間57bは支持アーク53のθB3のベースアーク長と器具アーク54bの拡張アーク長θE4から得られる面及び底寸法を持つ。
(5)アクチュエータ51は作業空間57b内で内視鏡60の遠位端60dの広範な動きを制御するために所望のφ1度にわたって主軸PA2まわりにアーク53及び54bを一緒に回転させるように命令され得る。
(6)アクチュエータ52は作業空間57b内で内視鏡60の遠位端60dの的を絞った動きを制御するために所望のφ2度にわたって第二軸SA2まわりに器具アーク54bを回転させるように命令され得る。
(7)エンドエフェクタ55bはその長手方向軸LA2まわりに内視鏡60を回転させる手動若しくは制御された能力を持つ。
Claims (15)
- 主軸に沿って回転運動を生成するように動作可能なベースアクチュエータと、
第二軸に沿って回転運動を生成するように動作可能な器具アクチュエータと、
長手方向軸に沿って器具を保持するように動作可能なエンドエフェクタと、
複数のアームセットと
を有する、再構成可能なロボットシステムであって、
前記複数のアームセットの各アームセットが、前記ベースアクチュエータが前記主軸に沿って回転運動を生成すること及び前記器具アクチュエータが前記第二軸に沿って回転運動を生成することの少なくとも一方に応答して、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタを連続的に接合して、遠隔運動中心に対してピッチ範囲及びヨー範囲を持つ作業空間内で前記エンドエフェクタによって保持される器具を動かすためのそれぞれのアーク構成を確立するように動作可能であり、
前記それぞれのアーク構成が、前記主軸、前記第二軸、及び前記長手方向軸の交点として前記遠隔運動中心を定義し、
前記複数のアームセットの1つのアームセットが、前記複数のアームセットの他のアームセットと少なくとも部分的に交換可能であり、これにより、前記1つのアームセットにより確立されるアーク構成とは異なるアーク構成を確立する、
再構成可能なロボットシステム。 - 基準座標系内で前記ベースアクチュエータに接合される前記エンドエフェクタを位置決めするために前記ベースアクチュエータに結合されるように動作可能なロボットプラットフォームをさらに有する、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットは、前記ベースアクチュエータと前記器具アクチュエータの間に固定長若しくは可変長を持つ、前記ベースアクチュエータと前記器具アクチュエータに接合されるように動作可能な同じ支持アームを含む、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットは、前記ベースアクチュエータと前記器具アクチュエータの間に固定長若しくは可変長を持つ、前記ベースアクチュエータと前記器具アクチュエータに接合されるように動作可能な異なる支持アームを含む、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットは、前記器具アクチュエータと前記エンドエフェクタの間に固定長若しくは可変長を持つ、前記器具アクチュエータと前記エンドエフェクタに接合されるように動作可能な同じ器具アームを含む、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットは、前記器具アクチュエータと前記エンドエフェクタの間に固定長若しくは可変長を持つ、前記器具アクチュエータと前記エンドエフェクタに接合されるように動作可能な異なる器具アームを含む、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットは前記ベースアクチュエータと前記器具アクチュエータに取り付けられる同じ支持アームを含む、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットは前記器具アクチュエータに取り付けられる同じ支持アームを含み、
各アームセットは前記器具アクチュエータに取り外し可能に結合されるように動作可能な異なる器具アームをさらに含む、
請求項1に記載の再構成可能なロボットシステム。 - 各アームセットが器具アームを含み、
前記エンドエフェクタが各器具アームに取り外し可能に結合されるように動作可能である、
請求項1に記載の再構成可能なロボットシステム。 - 各アームセットがアーク形状を持つアームを含む、請求項1に記載の再構成可能なロボットシステム。
- 前記複数のアームセットの前記それぞれのアーク構成に対して前記エンドエフェクタによって保持される器具の前記遠隔運動中心に対する作業空間をシミュレーションするように動作可能なロボット構成ワークステーションをさらに有する、請求項1に記載の再構成可能なロボットシステム。
- 前記エンドエフェクタによって保持される器具の前記遠隔運動中心に対する作業空間の規定ピッチ範囲と規定ヨー範囲の少なくとも一方を確立するように、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタに接合されるべき前記アームセットのうち少なくとも一つを推薦するように動作可能なロボット構成ワークステーションをさらに有する、請求項1に記載の再構成可能なロボットシステム。
- 前記複数のアームセットのそれぞれのアームセットが、前記遠隔運動中心に対する前記器具の作業空間のそれぞれ異なるピッチ範囲及び/又はヨー範囲を提供するように構造的に構成されるアームを含む、請求項1に記載の再構成可能なロボットシステム。
- 各アームセットが識別マーカを含む、請求項1に記載の再構成可能なロボットシステム。
- 主軸に沿って回転運動を生成するように動作可能なベースアクチュエータと、
第二軸に沿って回転運動を生成するように動作可能な器具アクチュエータと、
長手方向軸に沿って器具を保持するように動作可能なエンドエフェクタと、
前記ベースアクチュエータが前記主軸に沿って回転運動を生成すること及び前記器具アクチュエータが前記第二軸に沿って回転運動を生成することの少なくとも一方に応答して、遠隔運動中心に対して前記エンドエフェクタによって保持される器具を動かすための第一アーク構成へ、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタを連続的に接合する第一アームセットと、
前記ベースアクチュエータが前記主軸に沿って回転運動を生成すること及び前記器具アクチュエータが前記第二軸に沿って回転運動を生成することの少なくとも一方に応答して、前記遠隔運動中心に対して前記エンドエフェクタによって保持される器具を動かすための第二アーク構成へ、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタを連続的に接合するように動作可能な第二アームセットと
を有する、再構成可能なロボットであって、
前記第一アーク構成と前記第二アーク構成は前記主軸、前記第二軸、及び前記長手方向軸の交点として前記遠隔運動中心を定義し、
前記第一アームセットと前記第二アームセットが、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタの前記第一アーク構成を、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタの前記第二アーク構成へ再構成するために少なくとも部分的に相互交換可能であり、
前記再構成可能なロボットが、前記エンドエフェクタによって保持される器具の前記遠隔運動中心に対する作業空間の規定ピッチ範囲と規定ヨー範囲の少なくとも一方を確立するように、前記ベースアクチュエータ、前記器具アクチュエータ、及び前記エンドエフェクタに接合されるべき前記アームセットのうち少なくとも一つを推薦するように動作可能なロボット構成ワークステーションを有する、
再構成可能なロボット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462024527P | 2014-07-15 | 2014-07-15 | |
| US62/024,527 | 2014-07-15 | ||
| PCT/IB2015/055090 WO2016009301A2 (en) | 2014-07-15 | 2015-07-06 | Reconfigurable robot architecture for minimally invasive procedures |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017525413A JP2017525413A (ja) | 2017-09-07 |
| JP2017525413A5 JP2017525413A5 (ja) | 2018-08-02 |
| JP6692301B2 true JP6692301B2 (ja) | 2020-05-13 |
Family
ID=53969382
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016574956A Expired - Fee Related JP6692301B2 (ja) | 2014-07-15 | 2015-07-06 | 低侵襲手術用の再構成可能なロボットアーキテクチャ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170165847A1 (ja) |
| EP (1) | EP3169491A2 (ja) |
| JP (1) | JP6692301B2 (ja) |
| CN (1) | CN106536134A (ja) |
| WO (1) | WO2016009301A2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015142780A1 (en) * | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Indicator mechanism for an actuator controlled surgical instrument |
| KR102327948B1 (ko) | 2014-03-17 | 2021-11-17 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격 조종 의료 시스템을 위한 구조적 조절 시스템 및 방법 |
| EP3949891A1 (en) * | 2016-10-04 | 2022-02-09 | Intuitive Surgical Operations, Inc. | Computer-assisted teleoperated surgery systems and methods |
| US11564760B2 (en) | 2016-10-18 | 2023-01-31 | Intuitive Surgical Operations, Inc. | Computer-assisted teleoperated surgery systems and methods |
| US20200170732A1 (en) * | 2017-06-19 | 2020-06-04 | Koninklijke Philips N.V. | Configurable parallel medical robot having a coaxial end-effector |
| US11406459B2 (en) | 2017-07-07 | 2022-08-09 | Koninklijke Philips N.V. | Robotic instrument guide integration with an acoustic probe |
| CN113440262B (zh) * | 2021-08-12 | 2023-02-17 | 吉林大学 | 一种腹腔微创手术机器人 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5901936A (en) * | 1997-08-25 | 1999-05-11 | Sandia Corporation | Six-degree-of-freedom multi-axes positioning apparatus |
| US6424885B1 (en) * | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US7763015B2 (en) * | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| GB0521281D0 (en) * | 2005-10-19 | 2005-11-30 | Acrobat Company The Ltd | hybrid constrant mechanism |
| CA2654344C (en) * | 2006-06-19 | 2015-11-03 | Robarts Research Institute | Apparatus for guiding a medical tool |
| US8282653B2 (en) * | 2008-03-24 | 2012-10-09 | Board Of Regents Of The University Of Nebraska | System and methods for controlling surgical tool elements |
| KR100944412B1 (ko) * | 2008-10-13 | 2010-02-25 | (주)미래컴퍼니 | 수술용 슬레이브 로봇 |
| US20110257661A1 (en) * | 2009-01-20 | 2011-10-20 | Seung Wook Choi | Surgical robot for liposuction |
| US9259289B2 (en) * | 2011-05-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Estimation of a position and orientation of a frame used in controlling movement of a tool |
| CN102225545B (zh) * | 2011-05-31 | 2013-07-10 | 北京航空航天大学 | 一种具有虚拟运动中心的两维转动并联机构 |
| GB201300490D0 (en) * | 2013-01-11 | 2013-02-27 | Univ Leuven Kath | An apparatus and method for generating motion around a remote centre of motion |
| KR102188100B1 (ko) * | 2013-03-15 | 2020-12-07 | 삼성전자주식회사 | 로봇 및 그 제어방법 |
| EP2969405B1 (en) * | 2013-03-15 | 2022-08-24 | Intuitive Surgical Operations, Inc. | Systems for facilitating access to edges of cartesian-coordinate space using the null space |
| CN103273479A (zh) * | 2013-05-15 | 2013-09-04 | 西安电子科技大学 | 循环索驱动的索牵引并联机器人装置 |
| TWI523743B (zh) * | 2014-01-22 | 2016-03-01 | Hiwin Tech Corp | Spherical Linkage Robotic Arm |
| KR101485291B1 (ko) * | 2014-04-07 | 2015-01-21 | 재단법인대구경북과학기술원 | 로봇 |
-
2015
- 2015-07-06 WO PCT/IB2015/055090 patent/WO2016009301A2/en active Application Filing
- 2015-07-06 JP JP2016574956A patent/JP6692301B2/ja not_active Expired - Fee Related
- 2015-07-06 CN CN201580038327.0A patent/CN106536134A/zh active Pending
- 2015-07-06 US US15/323,758 patent/US20170165847A1/en not_active Abandoned
- 2015-07-06 EP EP15753996.6A patent/EP3169491A2/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| EP3169491A2 (en) | 2017-05-24 |
| CN106536134A (zh) | 2017-03-22 |
| WO2016009301A3 (en) | 2016-03-10 |
| WO2016009301A2 (en) | 2016-01-21 |
| US20170165847A1 (en) | 2017-06-15 |
| JP2017525413A (ja) | 2017-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6692301B2 (ja) | 低侵襲手術用の再構成可能なロボットアーキテクチャ | |
| JP6678686B2 (ja) | 外科用ロボットのリストにおけるトルクセンシング | |
| US11963666B2 (en) | Overall endoscopic control system | |
| JP6959264B2 (ja) | ロボット手術システム用制御アームアセンブリ | |
| US9561081B2 (en) | Control methods of single-port surgical robots | |
| JP2023544360A (ja) | 複数の外科用ディスプレイ上へのインタラクティブ情報オーバーレイ | |
| CN104519823A (zh) | 机器人远程运动中心的控制器限定 | |
| JP2023544594A (ja) | 容量及びユーザ操作に基づく階層化されたシステムの表示制御 | |
| JP2023544593A (ja) | 協働的外科用ディスプレイ | |
| Khandalavala et al. | Emerging surgical robotic technology: a progression toward microbots | |
| JP2015150425A (ja) | 手術ロボット用マスター装置及びその制御方法 | |
| KR20150127292A (ko) | 소프트웨어 구성가능한 매니퓰레이터 자유도 | |
| JP2023549687A (ja) | 関節の内部自由度を備えた腹腔鏡手術ロボットシステム | |
| JP2020512116A (ja) | マーカーレスロボット追跡システム、制御装置、及び方法 | |
| Li et al. | Design and evaluation of a variable stiffness manual operating platform for laparoendoscopic single site surgery (LESS) | |
| US11832911B2 (en) | Surgical platform supported by multiple arms | |
| Bumm et al. | An automated robotic approach with redundant navigation for minimal invasive extended transsphenoidal skull base surgery | |
| Shi et al. | A shape memory alloy‐actuated surgical instrument with compact volume | |
| WO2018234320A1 (en) | CONFIGURABLE PARALLEL MEDICAL ROBOT HAVING COAXIAL TERMINAL EFFECTOR | |
| Lombard et al. | Robotics and Digital Guidance in ENT-H&N Surgery: Rapport SFORL 2017 | |
| US20230098189A1 (en) | Multi-catheter flexible robotic system | |
| Michel et al. | Literature review on endoscopic robotic systems in ear and sinus surgery | |
| Jong Yoon et al. | Preliminary articulable probe designs with RAVEN and challenges: image-guided robotic surgery multitool system | |
| JP2022516473A (ja) | 低侵襲性外科手術における到達性、作業空間、および巧妙さを最適化するためのシステムおよび方法 | |
| CN112888398A (zh) | 主机器人及其控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180620 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190322 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190320 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190829 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200210 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200407 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200414 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6692301 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |