JP6665012B2 - 船体摩擦抵抗低減装置及び船舶 - Google Patents
船体摩擦抵抗低減装置及び船舶 Download PDFInfo
- Publication number
- JP6665012B2 JP6665012B2 JP2016071335A JP2016071335A JP6665012B2 JP 6665012 B2 JP6665012 B2 JP 6665012B2 JP 2016071335 A JP2016071335 A JP 2016071335A JP 2016071335 A JP2016071335 A JP 2016071335A JP 6665012 B2 JP6665012 B2 JP 6665012B2
- Authority
- JP
- Japan
- Prior art keywords
- bubble
- propeller
- unit
- hull
- inflow
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B1/00—Hydrodynamic or hydrostatic features of hulls or of hydrofoils
- B63B1/32—Other means for varying the inherent hydrodynamic characteristics of hulls
- B63B1/34—Other means for varying the inherent hydrodynamic characteristics of hulls by reducing surface friction
- B63B1/38—Other means for varying the inherent hydrodynamic characteristics of hulls by reducing surface friction using air bubbles or air layers gas filled volumes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T70/00—Maritime or waterways transport
- Y02T70/10—Measures concerning design or construction of watercraft hulls
Landscapes
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Vibration Prevention Devices (AREA)
Description
このような技術として、例えば特許文献1に開示された技術がある。特許文献1に開示された技術では、航行状況判断部(100)及び海象判断部(120)を備え、船舶の現況や海象に基づき船底(3)への気泡の噴出に関する制御を行うようにしており、例えば、波高が所定値以上になった場合には気泡の噴出を停止するようにしている(段落[0079]−[0083],[0097]など参照。括弧内の符号は特許文献1で使用されている符号を示す)。
特許文献1に開示された技術では、種々のセンサを設けて、これらのセンサの検出結果に基づいて航行状況や海象に関する判断を行い、この判断に基づいて気泡の噴出に関する制御を行っているものの、プロペラへの気泡の流入を課題として認識すらしておらず、当該課題を解決しうるものではない。
前記振動検出手段が、前記船体幅方向に沿って複数設けられ、前記判定部は、前記複数の振動検出手段の各検出情報に基づいて前記判定を行い、前記複数の振動検出手段の内、前記判定部により、前記検出情報に基づいて前記プロペラへ前記気泡が流入していると判定された前記振動検出手段があった場合には、前記調整機構制御部は、少なくとも、前記気泡が流入していると判定された前記振動検出手段の前方の気泡噴出ユニットについて、前記気泡の噴出量を前記所定量よりも減少させることを特徴としている。
なお、以下の説明では、船舶1の船首11側(進行方向)を前方とし、船尾12側を後方とし、前方を基準に左右を定め、重力の方向を下方とし、その逆を上方として説明する。また、船体前後方向(以下「前後方向」ともいう)Xと直交する方向を船体幅方向Y(以下「幅方向」又は「船幅方向」ともいう)とし、幅方向Yに関するセンターラインCLに近づく側を内側とし、その逆にセンターラインCLから離れる側を外側として説明する。
また、船舶1に搭載される装置や部品の説明では、それらの装置や部品が船舶1に搭載された状態を基準として、上下方向,左右方向及び前後方向を定める。
[1−1.船舶の全体構成]
本発明の第1実施形態としての船舶の全体構成について、図1を参照して説明する。
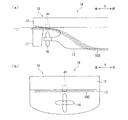
図1は、本発明の第1実施形態としての船舶の全体構成を示す模式図であり、(a)は側面図、(b)は底面図であって船体摩擦抵抗低減装置に係る空気系統図を併せて示す図である。
図1に示すように、船舶1は、船舶1の本体である船体10と、船舶1の各種制御が行われるコントロールルーム20と、船体摩擦抵抗低減装置30とを備える。船舶1は、これに限定されるものではないが、船底13が平坦となる平底船である。
船体10には、その後部(船尾12寄り)のセンターラインCL上に、船体10を推進するプロペラ16が一基又は複数(本実施形態では一基)設置され、さらにプロペラ16の後方に、船体10の進行方向を定める舵17が設置されている。プロペラ16の回転中心C0及び舵17は何れも平面視においてセンターラインCL上に位置設定されている。
船体摩擦抵抗低減装置30は、船底13から空気を噴出して船底13と水面との境界に気泡流(以下、気泡ともいう)100を発生させ、この気泡流100により船底13を覆う気泡層を形成することで航行する船体1の摩擦抵抗を低減するものである。
[1−2−1.船体摩擦抵抗低減装置の全体構成]
図1及び図2を参照して、船体摩擦抵抗低減装置30の全体構成についてさらに説明する。
図2は、船体摩擦抵抗低減装置30の構成を模式図であって、制御装置50の制御構成を示すブロック図を含む。
船体摩擦抵抗低減装置30は、図1(b)及び図2に示すように、例えばブロアやコンプレッサにより構成される空気供給源31と、空気供給源31に一端を接続された空気供給通路32と、空気供給通路32に設置された流量調整弁33と、空気供給通路32の他端側から分岐する複数(ここでは6本)の分岐供給管34と、各分岐供給管34に設置されたシャット弁(調整機構)35と、各分岐供給管34の分岐端に接続された気泡噴出部36C,36L,36Rと、プロペラ16を監視する監視カメラ(撮像装置)40と、コントロールルーム20に配置される制御装置50とを備える。
以下、気泡噴出部36C,36L,36Rを区別しない場合には、気泡噴出部36と表記する。
例えば、プロペラ16の正面前方に気泡噴出部36Cが位置するとは、図1(b)に示すようなプロペラ16の上流側領域Aに、少なくとも一部が含まれるように気泡噴出部36Cが位置すること、又は、プロペラ16の中心線上に少なくとも一部が存在するように気泡噴出部36Cが位置することと規定できるが、これに限定されるものではない。
流量調整弁33の開度は制御装置50により制御される。流量調整弁33の開度が制御されることで、各気泡噴出部36C,36L,36Rからの気泡噴出量が一斉に制御される。
各気泡噴出ユニット36−uにはそれぞれ分岐供給管34が接続され、各分岐供給管34にはそれぞれシャット弁35が設置されている。シャット弁35は、オンオフ弁であり、制御装置50により全開又は全閉に制御される。すなわち、シャット弁35が制御装置50により全閉に制御された場合には、対応する気泡噴出ユニット36−uから気泡が噴出され、シャット弁35が制御装置50により全閉に制御された場合には、対応する気泡噴出ユニット36−uからの気泡の噴出が停止される。また、シャット弁35は、海水が、停止状態の気泡噴出ユニット36−uから逆流して分岐供給管34に浸入すること防止する逆止弁としての機能も担っている。
なお、監視カメラ40は、プロペラ16の全体を撮像できるのであれば、設置個所や個数は上記のものに限定されない。
図2及び図3を参照して、船体摩擦抵抗低減装置30の制御装置50の制御構成について説明する。
図3(a),(b)は、本発明の第1実施形態に係る判定部51による判定方法を説明するための模式図であって、監視カメラ40により撮像されたプロペラ16の画像の例を示す図である。なお、監視カメラ40は斜め前方よりプロペラ16を撮像するため、実際には、監視カメラ40により撮像された画像は、プロペラ16の斜視画像となり、また、船体1の一部が映り込むが、図3(a),(b)では、便宜的に、プロペラ16の正面画像とすると共に船体1を省略している。
制御装置50は、図2に示すように、プロペラ16に気泡が流入しているか否かを判定する判定部51と、判定部51の判定結果に基づいてシャット弁35の作動を制御するシャット弁制御部(調整機構制御部)52とを備える。
上述したように図3(a),(b)では便宜的にプロペラ16の正面画像を記載しているが、実際には、監視カメラ40は、プロペラ16を左右両側から撮像しているため、一台単独では左右片側しか十分に撮像できない。このため、判定部51は、両監視カメラ40の画像情報を解析し、何れの監視カメラ40の画像情報も、図3(a)に示すように、気泡検知領域Rに気泡100が流入していないことを示すときには、プロペラ16に気泡流100は流入していないと判定し、何れか一方の監視カメラ40の画像情報が、図3(b)に示すように、気泡検知領域Rに気泡が流入していることを示すときには、プロペラ16に気泡流100が流入していると判定する。
本発明の第1実施形態としての船体摩擦抵抗低減装置30及び船舶1によれば、監視カメラ40により撮像された画像情報から判定部51により、プロペラ16に気泡流100が流入したか否かの判定が行われ、この判定結果がシャット弁制御部52に出力される。
シャット弁制御部52は、この判定結果が、プロペラ16に気泡流100は流入していない旨の判定であった場合には、図1(b)に示すように、全てのシャット弁35を開弁して、全ての気泡噴出ユニット36C−1〜気泡噴出ユニット36R−2を作動させる。これにより、船底1の殆どの領域を気泡100により覆うことができる。
その一方、シャット弁制御部52は、判定部51の判定結果が、プロペラ16に気泡流100が流入している旨の判定であった場合には、図2に示すように、プロペラ16の正面前方に位置する気泡噴出ユニット36C−1,36C−2に設置されたシャット弁35を閉弁し、その他の気泡噴出ユニット36L−1,36L−2,36R−1,36R−2に設置されたシャット弁35を開弁する。
したがって、特にプロペラ16へ気泡100が流入し易い高速航走時において、プロペラ16への気泡100の流入によるリスクを抑制しつつ、船体1の摩擦抵抗を低減することができる。
本発明の第2実施形態としての船体摩擦抵抗低減装置及び船舶について、図4及び図5を参照して説明する。なお、第1実施形態と同一の構成要素については同一の符号を付し、その説明を省略する。
図4は、本発明の第2実施形態としての船舶の要部構成を示す模式図であり、(a)は船舶後部の側面図、(b)は背面図(舵17は省略)である。
図5(a),(b)は、本発明の第2実施形態に係る判定部による判定方法を説明するための模式図であって、監視カメラにより側方から撮像されたプロペラの画像の例を示す図である。
本実施形態の船体摩擦抵抗低減装置及び船舶は、上記第1実施形態に対して、監視カメラ40の配置が異なる。
具体的には、図4(a),(b)に示すように、船幅方向Yでプロペラ16の両外側に監視カメラ40を一対に配置している。本実施形態ではプロペラ16の真横(つまり前後方向Xに関して同じ位置に)に監視カメラ40を配置しているが、船幅方向Yでプロペラ16よりも外側であればプロペラ16よりも前側又は後側に配置してもよい。
また、各監視カメラ40は、船尾12の下面の外側縁から垂下した一対のブラケット(支持部材)40aによりそれぞれ支持されている。船体1に取り付け箇所を確保できるのであれば各監視カメラ40をそれぞれ船体1に直接取り付けるようにしてもよい。
そこで、監視カメラ40を、プロペラ16の船幅方向Yに関して外側に配置することにより、プロペラ16に流れ込む気泡流100の進行経路から監視カメラ40を外すようにしている。
この他の構成は第1実施形態と同様なので説明を省略する。
本発明の第2実施形態としての船体摩擦抵抗低減装置及び船舶によれば、監視カメラ40が気泡流100の中に入り込むことが抑制されるので、気泡流100の影響のない鮮明な画像情報を監視カメラ40により取得することができる。したがって、鮮明な画像情報に基づいて、プロペラ16への気泡流100の流れ込みの検出精度を向上することができ、一層効果的に、プロペラ16への気泡100の流入によるリスクを抑制しつつ、船体1の摩擦抵抗を低減することができる。
本発明の第3実施形態としての船体摩擦抵抗低減装置及び船舶について、図6〜図8を参照して説明する。なお、上記各実施形態と同一の構成要素については同一の符号を付し、その説明を省略する。
図6は、本発明の第3実施形態としての船舶の要部構成を示す模式図であり、(a)は船舶後部の側面図、(b)は背面図(舵17は省略)である。
図7は、本発明の第3実施形態に係る船体摩擦抵抗低減装置30Aの構成を模式図であって、制御装置50Aの制御構成を示すブロック図を含む。
図8は、本発明の第3実施形態に係る判定部による判定方法を説明するための模式図であって、(a)はプロペラ上方の圧力変動の一例を示す図、(b),(c),(d)はプロペラ上方の変動圧の周波数スペクトルの一例を示す図である。
本実施形態の船体摩擦抵抗低減装置30A及び船舶1Aは、第1実施形態の船体摩擦抵抗低減装置30及び船舶1に対して、監視カメラ40に替えて圧力センサ(振動検出手段)41を使用してプロペラ16への気泡流100の流入を検出したものである。すなわち、第1実施形態では監視カメラ40と判定部51とにより本発明の流入情報取得手段及び流入検出手段を構成したのに対し、本実施形態では、圧力センサ41と判定部51Aとにより本発明の流入情報取得手段及び流入検出手段を構成している。
船体摩擦抵抗低減装置30Aは、図7に示すように、空気供給源31と、空気供給通路32と、流量調整弁33と、分岐供給管34と、シャット弁35と、気泡噴出部36C,36L,36Rと、前記圧力センサ41と、コントロールルーム20〔図1(a)参照〕に配置される制御装置50Aとを備える。
判定部51Aは、圧力センサ41からプロペラ16上方の圧力Pを所定の周期で取得して、図8(a)に示すように圧力Pと時間tとを関連付けた時系列データPp、すなわち圧力変動を把握する。そして、判定部51Aは、この時系列データをFFT解析することにより、図8(b),(c),(d)に示すような変動圧ΔPの周波数スペクトルを周期的に取得する。変動圧ΔPは振動と相関し、変動圧ΔPが大きければ振動も大きくなるので、図8(b),(c),(d)の縦軸を振動と置き換えて考えることができる。
ここで、図8(b)は船体摩擦抵抗低減装置30Aが停止している場合、図8(c)は船体摩擦抵抗低減装置30Aが作動中であるが気泡流100がプロペラ16に流入していない場合、図8(d)は船体摩擦抵抗低減装置30Aが作動中であり気泡流100がプロペラ16に流入している場合における変動圧ΔPの周波数スペクトルの一例である。
つまり、プロペラ16とこのプロペラ16の直上及び直上付近の船底13との間の気泡流100がダンパとして機能して、NZ周波数F1の高次成分F2,F3,F4のピーク値ΔP2,ΔP3,ΔP4は減衰し、NZ周波数F1のピーク値ΔP1のみが、図8(b)のピーク値ΔP1と同等のレベルのまま残っている。
シャット弁制御部(調整機構制御部)52Aは、第1実施形態のシャット弁制御部52と同様に構成されており、判定部51Aからプロペラ16に気泡流100が流入していない旨の情報を取得したときには、全てのシャット弁35を開弁状態に制御し、判定部51Aからプロペラ16に気泡流100が流入している旨の情報を取得したときには、プロペラ16の正面前方に位置する気泡噴出部36Cに繋がる分岐供給管34のシャット弁35を閉弁する。
この他の構成は第1実施形態と同様なので説明を省略する。
本発明の第3実施形態としての船体摩擦抵抗低減装置30A及び船舶1Aによれば、プロペラ16への気泡100の流入により生じる振動を、圧力センサ41により変動圧ΔPとして直接的に検出するため、上記第1実施形態及び第2実施形態のように監視カメラ40を使用する場合よりも、精度良くプロペラ16への気泡流100の流入を検出することができる。つまり、監視カメラ40を使用した検出では、夜間のようにプロペラ16の周辺が暗い場合や水の透明度が低い場合には気泡流100の識別精度が低下してプロペラ16への気泡流100の流入の検出精度も低下する可能性があるが、変動圧ΔPに基づく検知であれば、このような場合でもプロペラ16への気泡流100の流入を精度良く検出することが可能となる。
(1)上記第3実施形態では、振動検出手段として、プロペラ16の鉛直上方に設置した圧力センサ41を使用したが、この圧力センサ41に替えて、プロペラ16の鉛直上方を含むプロペラ16の近傍に設置した加速度センサを振動検出手段として使用してもよい。加速度センサを振動検出手段に使用する場合は、船体1の振動を検出するので、検出端を船外に露出させる必要がない。したがって、圧力センサ41を使用する場合のように船体に取り付け孔を加工することが不要となり、取り付けが容易となる。
(2)圧力センサ41の設置個所は、プロペラ16の厳格に鉛直上方でなくともよく、プロペラ16への気泡流100流入を変動圧として検出できる範囲で、プロペラ16の鉛直上方から左右前後に外れていてもよい。
本発明の第4実施形態としての船体摩擦抵抗低減装置及び船舶について、図9〜図11を参照して説明する。なお、上記の各実施形態と同一の構成要素については同一の符号を付し、その説明を省略する。
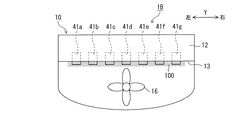
図9は、本発明の第4実施形態としての船舶1Bの要部構成を示す模式的な背面図(舵17は省略)である。
図10は、本発明の第4実施形態に係る船体摩擦抵抗低減装置30Bの構成を模式図であって、制御装置50Bの制御構成を示すブロック図を含む。
図11(a),(b)は、本発明の第4実施形態に係る判定部による判定方法を説明するための模式図であって、横軸を船幅方向Yとし縦軸を変動圧ΔPとする座標上にプロペラ16上方の変動圧分布の一例を示す図である。座標上に、プロペラ16と気泡噴出部36C,36R,36Lとを、船幅方向Yに関する位置をあわせて仮想的に示す。
本実施形態の船体摩擦抵抗低減装置30B及び船舶1Bは、第3実施形態の船体摩擦抵抗低減装置30A及び船舶1Aに対して、複数の圧力センサ(振動検出手段)41a〜41gを使用してプロペラ16への気泡流100の流入を検出したものである。すなわち、第3実施形態では一つの圧力センサ41と判定部51Aとにより本発明の流入情報取得手段及び流入検出手段を構成したのに対し、本実施形態では、複数の圧力センサ41a〜41gと判定部51Bとにより本発明の流入情報取得手段及び流入検出手段を構成している。
船体摩擦抵抗低減装置30Bは、図10に示すように、空気供給源31と、空気供給通路32と、流量調整弁33と、分岐供給管34と、シャット弁35と、気泡噴出部36C,36L,36Rと、前記の複数の圧力センサ41a〜41gと、コントロールルーム20〔図1(a)参照〕に配置される制御装置50Bとを備える。
判定部51Bは、各圧力センサ41a〜41gから圧力Pを所定の周期で取得して、これらの圧力センサ41a〜41gの各々について、変動圧ΔPの最大ピーク値ΔP7〜ΔP13を求める。最大ピーク値とは、周波数スペクトルにおけるピーク値の中で最大のピーク値をいい、例えば、第3実施形態の説明で使用した図8(b),(c),(d)に示す例ではピーク値ΔP1が最大ピーク値となる。そして、判定部51Bは、予め記憶した各圧力センサ41a〜41gの船幅方向Yに関する位置情報と最大ピーク値ΔP7〜ΔP13とから、図11(a),(b)に示すように、これらの複数の最大ピーク値ΔP7〜ΔP13を補完して船幅方向Yに関するピーク分布Wpを求める。そして、判定部51Bは、このピーク分布WpのアラームラインLaを越えるアラーム領域Ra〔図11(a),(b)に斜線を引いて示す〕を、プロペラ16に気泡流100が流入している領域としてシャット弁制御部52Bに出力する。
なお、アラーム領域Raの正面前方にある気泡噴出ユニット36−uとは、詳しくは、平面視においてアラーム領域Raの正面前方にある気泡噴出ユニット36−u、別の表現をすれば、船幅方向Yに関して少なくとも一部がアラーム領域Raに重なる気泡噴出ユニット36−uをいう。同様に、アラームラインLaを越える圧力センサ41a〜41gの正面前方にある気泡噴出ユニット36−uとは、詳しくは、平面視において、アラームラインLaを越える圧力センサ41a〜41gの正面前方にある気泡噴出ユニット36−u、別の表現をすれば、アラームラインLaを越える圧力センサ41a〜41gに、船幅方向Yに関して少なくとも一部が重なる気泡噴出ユニット36−uをいう。
なお、第3実施形態と同様に圧力センサに替えて加速センサを使用してもよい。
この他の構成は第3実施形態と同様なので説明を省略する。
本発明の第4実施形態としての船体摩擦抵抗低減装置30B及び船舶1Bによれば、第3実施形態と同様の効果が得られる他、変動圧ΔPのピーク分布Wpに応じて気泡100を停止すべき気泡噴出ユニット36−uをより細かく設定することができ、一層効果的にプロペラ16への気泡100の流入によるリスクを抑制しつつ、船体1の摩擦抵抗を低減することができる。
(1)上記第4実施形態では、アラーム領域Raの前方にある気泡噴出ユニットの作動を停止させ、或いは、アラームラインLaを越える圧力センサ41a〜41gの正面前方にある気泡噴出ユニット36−uを停止するようにしたが、アラーム領域Raが発生する場合や、アラームラインLaを越える圧力センサが一つでも存在する場合には、一義的にプロペラ16の前方にある気泡噴出部36C(気泡噴出ユニット36C−1,36C−2)を停止するようにしてもよい。
この場合、判定部51Bは、これらの圧力センサ41c,41d,41eの検出結果から求めた最大ピーク値に基づいて気泡流100の流入を判定し、この判定結果をシャット弁制御部52Bに出力する。或いは、判定部51Bは、変動圧ΔPの最大ピーク値がアラームラインLaを越える圧力センサ41c〜41eをシャット弁制御部52Bに出力する。
(1)変形例1
上記の第1実施形態及び第2実施形態において、コントロールルーム20に設置したモニタにより監視カメラ40により撮像された画像をオペレータが見られるようにしてもよく、さらに、監視カメラ40の撮像方向をコントロールルーム20から遠隔操作により調整できるようにしてもよい。
また、モニタで監視していたオペレータが、「気泡流100がプロペラ16に流入した又は気泡流100がプロペラ16に流入するおそれがあるとの判断」(以下、当該判断という)を行ったときに、オペレータのマニュアル操作により気泡噴出部36を停止させるマニュアルスイッチを設けてもよい。この場合、マニュアルスイッチが本発明の流入情報取得手段に相当する。
上記各実施形態では、判断部51,51A,51Bが当該判断を行ったときには、気泡噴出部36Cからの気泡100の噴出量を通常時よりも減少させる一態様として、シャット弁35を閉弁して気泡噴出部36Cによる気泡100の噴出を停止したが、気泡噴出部36Cからの気泡100の噴出量を通常時よりも減少させる態様は、これに限定されない。例えば、シャット弁35に替えて連続的又は段階的に開度を調節可能な調節弁を使用し、判断部51,51A,51Bが当該判断を行った場合には、調節弁の開度を通常時(判断部51,51A,51Bが当該判断を行わなかった場合)よりも開度を絞るようにしてもよい。この場合、調節弁の開度を絞っても、判断部51,51A,51Bが、依然として当該判断を行った場合は、さらに調節弁の開度を絞るようにしてもよい。
上記各実施形態では、判断部51,51A,51Bが当該判断を行った場合、気泡噴出部36Cについてだけ気泡100の噴出を停止したが、気泡噴出部36Cの気泡100の噴出停止(又は噴出量減少)と共に気泡噴出部36L,気泡噴出部36Rの少なくとも一方について気泡100の噴出停止(又は噴出量減少)を実施するようにしてもよい。
本変形例について図12を参照して説明する。
図12(a),(b)は、本変形例の船舶の構成を示す模式な底面図である。なお、各実施形態と同一の構成要素については同一の符号を付し、その説明を省略する。
上記各実施形態では、船舶1として、プロペラ16をセンターラインCL上に一基設けたものを例示したが、本発明はこれに限定されず、例えば図12(a),(b)に示すようなセンターラインCLの両外側にプロペラ16L,16Rをそれぞれ設けた船舶1C,1Dにも使用することができる。
図12(a)に示す船舶1Cでは、船底13の後部が、後部13L,13Rの二つに分かれており、これらの後部13L,13Rにプロペラ16L,16Rがそれぞれ設置されている。これに対し、図12(b)に示す船舶1Dでは、プロペラ16L,16Rが、単一の船底13の後部の左右両側(幅方向両側)から後方に突出して設置されている。
本変形例について図13(a),(b)を参照して説明する。
図13(a),(b)は、本変形例の船舶の要部である船尾側の構成を示す模式な底面図である。なお、各実施形態と同一の構成要素については同一の符号を付し、その説明を省略する。
上記各実施形態では、船舶1として、プロペラ16をセンターラインCL上に一基設けたものを例示したが、本発明はこれに限定されず、例えば図13(a),(b)に示すようなセンターラインCL上に(又はセンターラインCLに沿った複数の列上にそれぞれ)、複数〔本変形例では2つ〕のプロペラを前後に設けた船舶1E,1Fにも使用することができる。
図13(a)に示す船舶1Eでは、プロペラ16の後方にポッド推進器18が設けられている。ポッド推進器18は、前方のプロペラ16に対向するようにプロペラ18aを備えており、内蔵した電動機によりこのプロペラ16を駆動して推進力を発生させる。ポッド推進器18のプロペラ18aは、プロペラ16と共にセンターラインCL上に配置されている。
図13(b)に示す船舶1Fでは、プロペラ16A,16BがセンターラインCL上で前後に設けられており、内軸及び外軸からなる駆動軸によりこれらのプロペラ16A,16Bは相互に反対方向に回転駆動する。
つまり、プロペラ16の右舷側15側の監視カメラ40の画像情報に基づいてプロペラ16への気泡100の流入が検出された場合には、右舷側15側の気泡噴出ユニット36C−1を停止させ、プロペラ16の左舷側14側の監視カメラ40の画像情報に基づいてプロペラ16への気泡100の流入が検出された場合には、左舷側14側の気泡噴出ユニット36C−2を停止させるようにしてもよい。
この場合、例えば、右舷側15側の監視カメラ40の画像情報に基づいてプロペラ16への気泡100の流入が検出される一方、左舷側14側の監視カメラ40の画像情報に基づいてプロペラ16への気泡100の流入が検出されない場合には、右舷側15側の気泡噴出ユニット36C−1を停止させ、左舷側14側の気泡噴出ユニット36C−2を作動させることとなる。
10 船体
11 船首
12 船尾
13 船底
16,16A,16B,16L,16R プロペラ
18 ポッド推進器
18a ポッド推進器18のプロペラ
20 コントロールルーム
30,30A,30B 船体摩擦抵抗低減装置
32 空気供給通路
34 分岐供給管
35 シャット弁(調整機構)
36C,36L,36R 気泡噴出部
36C−1〜36R−2 気泡噴出ユニット
40 監視カメラ(撮像装置)
40a ブラケット(支持部材)
41,41a〜41g 圧力センサ(振動検出手段)
50,50A,50B 制御装置
51,51A,51B 判定部
52,52A,52B シャット弁制御部(調整機構制御部)
100 気泡流
CL 船体1,1A,1B,1C,1D,1E,1Fのセンターライン
Claims (11)
- 船底においてプロペラよりも前方に船体幅方向に沿って複数設けられ、気泡を噴出する気泡噴出ユニットと、前記気泡噴出ユニットの気泡噴出量を調整する調整機構と、制御装置とを備えた、船体摩擦抵抗低減装置であって、
前記プロペラに前記気泡が流入したこと又は前記プロペラに前記気泡が流入するおそれがあることを示す気泡流入情報を取得する流入情報取得手段を備え、
前記制御装置は、前記調整機構の作動を制御する調整機構制御部を有し、
前記調整機構制御部は、
前記流入情報取得手段から前記気泡流入情報を取得しない場合には、前記複数の気泡噴出ユニットのそれぞれから所定量の気泡が噴射されるように前記調整機構の作動を制御する一方、
前記流入情報取得手段から前記気泡流入情報を取得した場合には、前記複数の気泡噴出
ユニットの内、少なくとも、前記プロペラの正面前方に配置された気泡噴出ユニットについて、前記気泡の噴出量を前記所定量よりも減少させるように前記調整機構の作動を制御し、
前記流入情報取得手段は、前記プロペラへの前記気泡の流入を検出する流入検出手段であり、
前記流入検出手段は、
前記プロペラを撮像する撮像装置と、
前記制御装置に備えられ、前記撮像装置により撮像された画像情報に基づいて、前記プロペラへ前記気泡が流入しているか否かの判定を行う判定部とを備え、
前記撮像装置は、全ての気泡噴出ユニットの下流領域から外れるように配置された
ことを特徴とする、船体摩擦抵抗低減装置。 - 前記調整機構制御部は、前記流入情報取得手段から前記気泡流入情報を取得した場合には、前記複数の気泡噴出ユニットの内、少なくとも、前記プロペラの正面前方に配置された気泡噴出ユニットについて、前記気泡の噴出を停止させる
ことを特徴とする、請求項1に記載の船体摩擦抵抗低減装置。 - 前記調整機構制御部は、前記流入情報取得手段から前記気泡流入情報を取得した場合に
は、前記複数の気泡噴出ユニットの内、前記プロペラの正面前方の気泡噴出ユニットだけ、前記気泡の噴出量を前記所定量よりも減少させる
ことを特徴とする、請求項1又は2に記載の船体摩擦抵抗低減装置。 - 前記撮像装置は、前記プロペラの真横に配置された
ことを特徴とする、請求項1〜3の何れか一項に記載の船体摩擦抵抗低減装置。 - 前記撮像装置は、前記プロペラを前記船体幅方向両側から挟むようにして一対に配置された
ことを特徴とする、請求項1〜4の何れか一項に記載の船体摩擦抵抗低減装置。 - 船底においてプロペラよりも前方に船体幅方向に沿って複数設けられ、気泡を噴出する気泡噴出ユニットと、前記気泡噴出ユニットの気泡噴出量を調整する調整機構と、制御装置とを備えた、船体摩擦抵抗低減装置であって、
前記プロペラに前記気泡が流入したこと又は前記プロペラに前記気泡が流入するおそれがあることを示す気泡流入情報を取得する流入情報取得手段を備え、
前記制御装置は、前記調整機構の作動を制御する調整機構制御部を有し、
前記調整機構制御部は、
前記流入情報取得手段から前記気泡流入情報を取得しない場合には、前記複数の気泡噴出ユニットのそれぞれから所定量の気泡が噴射されるように前記調整機構の作動を制御する一方、
前記流入情報取得手段から前記気泡流入情報を取得した場合には、前記複数の気泡噴出ユニットの内、少なくとも、前記プロペラの正面前方に配置された気泡噴出ユニットについて、前記気泡の噴出量を前記所定量よりも減少させるように前記調整機構の作動を制御し、
前記流入情報取得手段は、前記プロペラへの前記気泡の流入を検出する流入検出手段であり、
前記流入検出手段は、
前記プロペラの振動又は振動に相関するパラメータを検出する振動検出手段と、
前記制御装置に備えられ、前記振動検出手段の検出情報に基づいて、前記プロペラへ前記気泡が流入しているか否かの判定を行う判定部とを備え、
前記振動検出手段が、前記船体幅方向に沿って複数設けられ、
前記判定部は、前記複数の振動検出手段の各検出情報に基づいて前記判定を行い、
前記複数の振動検出手段の内、前記判定部により、前記検出情報に基づいて前記プロペラへ前記気泡が流入していると判定された前記振動検出手段があった場合には、前記調整機構制御部は、少なくとも、前記気泡が流入していると判定された前記振動検出手段の前方の気泡噴出ユニットについて、前記気泡の噴出量を前記所定量よりも減少させる
ことを特徴とする、船体摩擦抵抗低減装置。 - 前記振動検出手段は、少なくとも検出端を、前記プロペラの上方において船外に露出させた圧力センサである
ことを特徴とする、請求項6に記載の船体摩擦抵抗低減装置。 - 前記振動検出手段は、前記プロペラの上方において船内に配置された加速度センサである
ことを特徴とする、請求項6に記載の船体摩擦抵抗低減装置。 - 前記プロペラは、前記船体幅方向で中央に設けられており、前記正面前方の気泡噴出ユニットが、前記船体幅方向で中央に配置された
ことを特徴とする、請求項1〜8の何れか一項に記載の船体摩擦抵抗低減装置。 - 前記プロペラは、前記船体幅方向に沿って複数並設されており、前記複数のプロペラの正面前方には前記気泡噴出ユニットがそれぞれ配置され、前記複数のプロペラのそれぞれに前記流入情報取得手段が備えられた
ことを特徴とする、請求項1〜8の何れか一項に記載の船体摩擦抵抗低減装置。 - 請求項1〜10の何れか一項に記載の船体摩擦抵抗低減装置を備えた
ことを特徴とする、船舶。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016071335A JP6665012B2 (ja) | 2016-03-31 | 2016-03-31 | 船体摩擦抵抗低減装置及び船舶 |
| PCT/JP2017/002481 WO2017169030A1 (ja) | 2016-03-31 | 2017-01-25 | 船体摩擦抵抗低減装置及び船舶 |
| KR1020187020105A KR102099523B1 (ko) | 2016-03-31 | 2017-01-25 | 선체 마찰 저항 저감 장치 및 선박 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016071335A JP6665012B2 (ja) | 2016-03-31 | 2016-03-31 | 船体摩擦抵抗低減装置及び船舶 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017178180A JP2017178180A (ja) | 2017-10-05 |
| JP2017178180A5 JP2017178180A5 (ja) | 2019-05-09 |
| JP6665012B2 true JP6665012B2 (ja) | 2020-03-13 |
Family
ID=59963003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016071335A Active JP6665012B2 (ja) | 2016-03-31 | 2016-03-31 | 船体摩擦抵抗低減装置及び船舶 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6665012B2 (ja) |
| KR (1) | KR102099523B1 (ja) |
| WO (1) | WO2017169030A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102477482B1 (ko) * | 2018-09-05 | 2022-12-13 | 삼성중공업 주식회사 | 저항 저감 장치 |
| KR20220141133A (ko) | 2021-04-12 | 2022-10-19 | 주식회사 번영중공업 | 풍력발전기 날개의 저항 시험용 알루미늄 선박 |
| WO2023191096A1 (ja) * | 2022-03-31 | 2023-10-05 | 国立研究開発法人 海上・港湾・航空技術研究所 | 船体摩擦抵抗低減装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62137891U (ja) * | 1986-02-26 | 1987-08-31 | ||
| JP2004188993A (ja) * | 2002-12-06 | 2004-07-08 | Tokai Univ | 船体の表面摩擦逓減法 |
| JP5311540B2 (ja) * | 2008-04-08 | 2013-10-09 | 独立行政法人海上技術安全研究所 | 船舶の気泡巻き込み防止装置 |
| JP5604736B2 (ja) | 2008-04-01 | 2014-10-15 | 独立行政法人海上技術安全研究所 | 船舶の摩擦抵抗低減装置 |
| KR20120054118A (ko) * | 2010-11-19 | 2012-05-30 | 현대중공업 주식회사 | 프로펠러의 공동현상을 방지한 에어캐비티 선박 |
| JP2014012443A (ja) * | 2012-07-04 | 2014-01-23 | Japan Marine United Corp | 摩擦抵抗低減船 |
| KR20140145775A (ko) * | 2013-06-14 | 2014-12-24 | 삼성중공업 주식회사 | 공기 윤활 장치 |
-
2016
- 2016-03-31 JP JP2016071335A patent/JP6665012B2/ja active Active
-
2017
- 2017-01-25 WO PCT/JP2017/002481 patent/WO2017169030A1/ja active Application Filing
- 2017-01-25 KR KR1020187020105A patent/KR102099523B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| KR102099523B1 (ko) | 2020-04-09 |
| JP2017178180A (ja) | 2017-10-05 |
| KR20180091916A (ko) | 2018-08-16 |
| WO2017169030A1 (ja) | 2017-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4953296B2 (ja) | 船体摩擦抵抗低減装置 | |
| JP5311540B2 (ja) | 船舶の気泡巻き込み防止装置 | |
| JP6665012B2 (ja) | 船体摩擦抵抗低減装置及び船舶 | |
| JP4953294B2 (ja) | 船体摩擦抵抗低減装置 | |
| CN102202961A (zh) | 船体摩擦阻力降低装置 | |
| JP5030080B2 (ja) | 船体摩擦抵抗低減装置 | |
| US9254904B2 (en) | Vessel | |
| JP2009092027A (ja) | 燃料ポンプの異常検出装置 | |
| JP2014012443A (ja) | 摩擦抵抗低減船 | |
| US20180050777A1 (en) | Closed tunnel system and directional device for outboard jet motors | |
| KR101324114B1 (ko) | 해수 펌프를 이용한 선박 감속 장치 및 방법 | |
| JP2017178180A5 (ja) | ||
| JPH07277278A (ja) | 水ジェット推進艇の流路圧力検出装置 | |
| JP4057412B2 (ja) | 小型滑走艇 | |
| KR20080076644A (ko) | 프로펠러가 없는 고압에어추진선박 | |
| KR101599652B1 (ko) | 선박의 저항 저감 장치 | |
| KR101708395B1 (ko) | 노즐 | |
| JP5791342B2 (ja) | 摩擦抵抗低減型船舶 | |
| EP2505488A1 (en) | Water jet propulsion device | |
| JP2016037221A (ja) | 小型船舶用推進システム | |
| KR200481513Y1 (ko) | 선박의 공기항력 저감장치 | |
| JP2014019251A (ja) | 空気巻き込み防止装置及び摩擦抵抗低減船 | |
| JPH11152077A (ja) | 摩擦低減船及び船体の摩擦低減方法 | |
| JP6664907B2 (ja) | 空気発生装置 | |
| JP5850507B2 (ja) | 船舶の気泡巻き込み防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190325 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6665012 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |