JP6654884B2 - 外科手術システム - Google Patents
外科手術システム Download PDFInfo
- Publication number
- JP6654884B2 JP6654884B2 JP2015242699A JP2015242699A JP6654884B2 JP 6654884 B2 JP6654884 B2 JP 6654884B2 JP 2015242699 A JP2015242699 A JP 2015242699A JP 2015242699 A JP2015242699 A JP 2015242699A JP 6654884 B2 JP6654884 B2 JP 6654884B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- link
- platform
- joint
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001356 surgical procedure Methods 0.000 title claims description 8
- 238000013519 translation Methods 0.000 claims description 102
- 210000000707 wrist Anatomy 0.000 claims description 19
- 230000008878 coupling Effects 0.000 claims description 4
- 238000010168 coupling process Methods 0.000 claims description 4
- 238000005859 coupling reaction Methods 0.000 claims description 4
- 230000007246 mechanism Effects 0.000 description 61
- 238000010586 diagram Methods 0.000 description 22
- 230000004048 modification Effects 0.000 description 20
- 238000012986 modification Methods 0.000 description 20
- 230000003028 elevating effect Effects 0.000 description 19
- 230000001954 sterilising effect Effects 0.000 description 13
- 238000004659 sterilization and disinfection Methods 0.000 description 12
- 239000003638 chemical reducing agent Substances 0.000 description 11
- 238000000034 method Methods 0.000 description 11
- 210000001503 joint Anatomy 0.000 description 9
- 230000009467 reduction Effects 0.000 description 9
- 238000001514 detection method Methods 0.000 description 8
- 239000012636 effector Substances 0.000 description 8
- 238000003860 storage Methods 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 6
- 239000000126 substance Substances 0.000 description 6
- 230000008602 contraction Effects 0.000 description 5
- 238000005452 bending Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 239000000645 desinfectant Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 244000052616 bacterial pathogen Species 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- SXRSQZLOMIGNAQ-UHFFFAOYSA-N Glutaraldehyde Chemical compound O=CCCCC=O SXRSQZLOMIGNAQ-UHFFFAOYSA-N 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 229960000587 glutaral Drugs 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000002357 laparoscopic surgery Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/295—Forceps for use in minimally invasive surgery combined with cutting implements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/72—Micromanipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/20—Holders specially adapted for surgical or diagnostic appliances or instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00225—Systems for controlling multiple different instruments, e.g. microsurgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
- A61B2017/00482—Coupling with a code
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/304—Surgical robots including a freely orientable platform, e.g. so called 'Stewart platforms'
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0808—Indication means for indicating correct assembly of components, e.g. of the surgical apparatus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/98—Identification means for patients or instruments, e.g. tags using electromagnetic means, e.g. transponders
Description
プラットホームと、
前記プラットホームに連結された複数のマニピュレータアームと、
前記複数のマニピュレータアームの各々の先端部に装着されたインストゥルメントと、
垂直に延在する柱部と水平に延在する水平アームとを有し、前記プラットホームを支持するポジショナとを備える。前記水平アームの基端部は、垂直な回転軸を中心に回動する第1回転関節を介して前記柱部と連結されている。前記水平アームの先端部には水平な回転軸を中心に回動する第2回転関節を介して連結された手首リンクが設けられ、当該手首リンクが前記プラットホームと連結されている。そして、前記ポジショナは、前記水平アームの水平を維持しながら前記第2回転関節を動かすことによって、前記プラットホームの水平からの傾きを変化させることを特徴としている。なお、上記インストゥルメントのうち少なくとも1つが内視鏡カメラアセンブリであってもよい。
以下、図面を参照しながら、上記外科手術システムについて詳細に説明する。
図1は、本発明の一実施形態に係る外科手術システム100の全体的な構成を示す概略図である。図1に示すように、外科手術システム100は、ロボット支援手術やロボット遠隔手術などのように、医師などの術者Oが患者側システム1を用いて患者Pに内視鏡外科手術を施すシステムである。
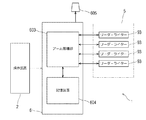
操作装置2は、外科手術システム100と術者Oのインターフェースを構成し、患者側システム1を操作するための装置である。操作装置2は、手術室内において手術台111の傍らに又は手術台111から離れて、或いは、手術室外に設置されている。操作装置2は、術者Oが動作指令を入力するための操作用マニピュレータアーム51や操作ペダル52などの操作入力部50と、内視鏡アセンブリ41で撮影された画像を表示するモニタ53とを含む。術者Oは、モニタ53で患部を視認しながら、操作入力部50を操作して操作装置2に動作指令を入力する。操作装置2に入力された動作指令は、有線又は無線により患者側システム1の後述するコントローラ6に伝達される。
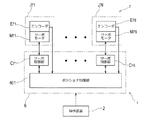
患者側システム1は、外科手術システム100と患者Pとのインターフェースを構成する。患者側システム1は、手術室内において患者Pが横たわる手術台111の傍らに配置されている。手術室内は滅菌された滅菌野である。
ここで、ポジショナ7の構成について詳細に説明する。図2は、ポジショナ7の全体的な構成を示す側面図である。
ここで、アーム3の構成について詳細に説明する。図7では、患者側システム1が備える複数のアーム3のうちの1本の概略構成が示されている。図7に示すように、アーム3は、アーム本体30と、アーム本体30の先端部に連結された並進アーム35とを備え、基端部に対し先端部を3次元空間内で移動させることができるように構成されている。なお、本実施形態では、患者側システム1が具備する複数のアーム3はいずれも同様又は類似の構成を有するが、複数のアーム3のうち少なくとも1本が余と異なる構成を有してもよい。
アーム本体30は、プラットホーム5に着脱可能に取り付けられるベース80と、ベース80から先端部に向けて順次連結された第1リンク81〜第6リンク86とを含む。より詳細には、ベース80の先端部に、捩り関節J31を介して第1リンク81の基端部が連結されている。第1リンク81の先端部に、捩り関節J32を介して第2リンク82の基端部が連結されている。第2リンク82の先端部に、曲げ関節J33を介して第3リンク83の基端部が連結されている。第3リンク83の先端部に、捩り関節J34を介して第4リンク84の基端部が連結されている。第4リンク84の先端部に、曲げ関節J35を介して第5リンク85の基端部が連結されている。第5リンク85の先端部に、捩り関節J36を介して第6リンク86の基端部が連結されている。第6リンク86の先端部に、並進アーム35の基端部が連結されている。
ここで、プラットホーム5とアーム3との連結構造について説明する。
図7に示すように、並進アーム35は、並進アーム35の先端部に取り付けられたホルダ36を基準方向Dに並進移動させることにより、ホルダ36に取り付けられたインストゥルメント42をシャフト43の延在方向に並進移動させる機構である。
図18は、並進アームの変形例1を示す図である。上記実施の形態において、並進アーム35は、アーム本体30の先端部30aから基準方向Dにおいてホルダ36に保持されたインストゥルメント42のシャフト43の基端部から先端部に向かう側に位置するように配設されているがこれに限られるものではない。これに代えて、並進アーム335は、並進アーム35は、アーム本体30の先端部30aから基準方向Dにおいてホルダ36に保持されたインストゥルメント42のシャフト43の先端部から基端部に向かう側に位置するように配設されていてもよい。
図19は、並進アームの変形例2を示す図である。上記実施の形態において、並進アーム35は、基端側リンク61の先端部に先端側リンク62の基端部が取り付けられている構成を例示したがこれに限られるものではない。これに代えて、以下の通り構成されていてもよい。
図7に示すように、アーム3は、揺動機構46を備えている。揺動機構46は、アーム3とエンドエフェクタ44との間に介在し、基準方向Dを中心とする径方向にシャフト43の先端部、及びエンドエフェクタ44を揺動させる機構である。
図20は、揺動機構の変形例1を示す図である。揺動機構は、ボール継手を用いた機構であってもよい。
図21は、揺動機構の変形例2を示す図である。揺動機構は、弾性を有する部材を用いた機構であってもよい。
図22は、揺動機構を備えるアームの変形例を示す図である。上記実施の形態において、揺動機構46がシャフト43の中間部に設けられている構成例を例示したがこれに限られるものではない。これに代えて、揺動機構46は、並進アーム35の先端部とインストゥルメント42との間に介在するように設けられていてもよい。
図23は、揺動機構を備えるアームの変形例を示す図である。上記実施の形態1において、揺動機構46は、並進アーム35を有するアーム3を備える外科手術システム100に適用したがこれに限られるものではない。これに代えて、揺動機構46は、直動関節235を有するアームに適用してもよい。
以上に説明したように、本実施形態に係る外科手術システム100(特に、そのうち患者側システム1)は、プラットホーム5と、プラットホーム5に連結された複数のアーム3(マニピュレータアーム)と、複数のアーム3の各々の先端部に装着されたインストゥルメント42及び/又は内視鏡アセンブリ41と、プラットホーム5を水平姿勢から姿勢変化可能に支持するポジショナ7とを備えている。
1 :患者側システム
2 :操作装置
1 :患者側システム
2 :操作装置
3 :マニピュレータアーム(アーム)
3A :カメラアーム
3B :インストゥルメントアーム
5 :プラットホーム
6 :コントローラ
601 :ポジショナ制御部(ポジショナ制御装置)
7 :ポジショナ
30 :アーム本体
41 :内視鏡アセンブリ
42 :インストゥルメント
70 :ベース
71 :揺動アーム
72 :昇降軸(柱部の一例)
72' :柱状部材(柱部の一例)
73 :水平アーム(マニピュレータアーム部)
74 :第1リンク
75 :第2リンク
76 :手首リンク
J71〜J76 :回転関節
O :術者
P :患者
S :マニピュレータアーム支持体
Claims (5)
- プラットホームと、
前記プラットホームに連結された複数のマニピュレータアームと、
前記複数のマニピュレータアームの各々の先端部に装着されたインストゥルメントと、
垂直に延在する柱部と水平に延在する水平アームとを有し、前記プラットホームを支持するポジショナとを備え、
前記水平アームの基端部は、垂直な回転軸を中心に回動する第1回転関節を介して前記柱部と連結されており、
前記水平アームの先端部には水平な回転軸を中心に回動する第2回転関節を介して連結された手首リンクが設けられ、当該手首リンクが前記プラットホームと連結されており、
前記ポジショナは、前記水平アームの水平を維持しながら前記第2回転関節を動かすことによって、前記プラットホームの水平からの傾きを変化させる、
外科手術システム。 - 前記柱部は、筒部材と、前記筒部材に移動可能に挿入された軸部材と、前記筒部材と前記軸部材とを連結する並進関節と、を有する、
請求項1に記載の外科手術システム。 - 前記ポジショナは、手術室の床に設置されたベースと、前記ベースに対し前記柱部の基端部を揺動可能に連結する揺動アームとを、更に有する、
請求項1又は2に記載の外科手術システム。 - 前記ポジショナは、前記ベースに対し前記揺動アームの基端部を水平な回転軸回りに回動可能に連結する第1関節と、前記揺動アームの先端部に対し前記柱部の基端部を水平な回転軸回りに回動可能に連結する第2関節とを有し、
前記第1関節と前記第2関節が連動することによって前記柱部の垂直な姿勢が維持されるように、前記第1関節及び前記第2関節の動作を制御する、ポジショナ制御装置を更に備える、
請求項3に記載の外科手術システム。 - 前記水平アームは、垂直な回転軸を中心に回動する第3回転関節を介して連結された第1リンク及び第2リンクを有し、前記第1リンクが前記柱部と連結され、前記第2リンクが前記手首リンクと連結されている、
請求項1乃至4のいずれか一項に記載の外科手術システム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242699A JP6654884B2 (ja) | 2015-12-11 | 2015-12-11 | 外科手術システム |
| KR1020187019126A KR20180090351A (ko) | 2015-12-11 | 2016-11-30 | 외과수술 시스템 |
| CN201680072222.1A CN108289715A (zh) | 2015-12-11 | 2016-11-30 | 外科手术系统 |
| PCT/JP2016/005034 WO2017098708A1 (ja) | 2015-12-11 | 2016-11-30 | 外科手術システム |
| US16/060,982 US20180360553A1 (en) | 2015-12-11 | 2016-11-30 | Surgical system |
| EP16872610.7A EP3388015A4 (en) | 2015-12-11 | 2016-11-30 | SYSTEM FOR SURGICAL OPERATION |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015242699A JP6654884B2 (ja) | 2015-12-11 | 2015-12-11 | 外科手術システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017104453A JP2017104453A (ja) | 2017-06-15 |
| JP6654884B2 true JP6654884B2 (ja) | 2020-02-26 |
Family
ID=59013891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015242699A Active JP6654884B2 (ja) | 2015-12-11 | 2015-12-11 | 外科手術システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20180360553A1 (ja) |
| EP (1) | EP3388015A4 (ja) |
| JP (1) | JP6654884B2 (ja) |
| KR (1) | KR20180090351A (ja) |
| CN (1) | CN108289715A (ja) |
| WO (1) | WO2017098708A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019050883A1 (en) * | 2017-09-06 | 2019-03-14 | Covidien Lp | MOBILE SURGICAL CONTROL CONSOLE |
| US20200129251A1 (en) * | 2018-10-31 | 2020-04-30 | Ss Innovations China Co., Ltd. | Omni-directional wheels for a robotic surgical cart |
| JP7153335B2 (ja) * | 2019-01-29 | 2022-10-14 | リバーフィールド株式会社 | 手術支援装置 |
| EP4070919A4 (en) * | 2019-12-05 | 2023-12-27 | Kawasaki Jukogyo Kabushiki Kaisha | SURGICAL ROBOT, SURGICAL SYSTEM AND CONTROL METHOD |
| JP7393383B2 (ja) | 2021-05-24 | 2023-12-06 | 川崎重工業株式会社 | 手術支援ロボットおよび多関節ロボットの作動方法 |
| US20230404692A1 (en) * | 2022-06-21 | 2023-12-21 | Mazor Robotics Ltd. | Cost effective robotic system architecture |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01210280A (ja) * | 1988-02-19 | 1989-08-23 | Tokico Ltd | 工業用ロボット |
| US6659939B2 (en) * | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6565554B1 (en) * | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US6788018B1 (en) * | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| JP3457651B2 (ja) * | 2001-06-05 | 2003-10-20 | 大阪機工株式会社 | 作業用ロボット |
| FR2829016B1 (fr) * | 2001-09-03 | 2007-01-19 | Bertin Virgile Claude Nahum | Dispositif chirurgical de guidage d'instruments de fraisage, percage, alesage ou coupe de tissus osseux |
| US20030208189A1 (en) * | 2001-10-19 | 2003-11-06 | Payman Gholam A. | Integrated system for correction of vision of the human eye |
| US8010180B2 (en) * | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| JP2004208922A (ja) * | 2002-12-27 | 2004-07-29 | Olympus Corp | 医療装置及び医療用マニピュレータ並びに医療装置の制御方法 |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US8079950B2 (en) * | 2005-09-29 | 2011-12-20 | Intuitive Surgical Operations, Inc. | Autofocus and/or autoscaling in telesurgery |
| JP2007117291A (ja) * | 2005-10-26 | 2007-05-17 | Olympus Medical Systems Corp | 立体観察装置 |
| EP1915963A1 (en) * | 2006-10-25 | 2008-04-30 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Force estimation for a minimally invasive robotic surgery system |
| US9096033B2 (en) * | 2007-06-13 | 2015-08-04 | Intuitive Surgical Operations, Inc. | Surgical system instrument sterile adapter |
| US8400094B2 (en) * | 2007-12-21 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Robotic surgical system with patient support |
| DE102008041260A1 (de) * | 2008-08-14 | 2010-02-25 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zum Betreiben eines medizinischen Roboters, medizinischer Roboter und medizinischer Arbeitsplatz |
| JP2012005557A (ja) * | 2010-06-23 | 2012-01-12 | Terumo Corp | 医療用ロボットシステム |
| US9358074B2 (en) * | 2012-06-01 | 2016-06-07 | Intuitive Surgical Operations, Inc. | Multi-port surgical robotic system architecture |
| KR102147826B1 (ko) * | 2012-08-15 | 2020-10-14 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 로봇 암의 수동식 운동에 의해 제어되는 이동가능한 수술용 장착 플랫폼 |
| CN108523996B (zh) * | 2012-11-14 | 2021-07-16 | 直观外科手术操作公司 | 用于双控制手术器械的系统和方法 |
| DE102012025100A1 (de) * | 2012-12-20 | 2014-06-26 | avateramedical GmBH | Entkoppeltes Mehrkamerasystem für die minimal-invasive Chirurgie |
| DE102012025102A1 (de) * | 2012-12-20 | 2014-06-26 | avateramedical GmBH | Endoskop mit einem Mehrkamerasystem für die minimal-invasive Chirurgie |
| KR20140112601A (ko) * | 2013-03-11 | 2014-09-24 | 삼성전자주식회사 | 내시경 수술기구 |
| DE102013205494B4 (de) * | 2013-03-27 | 2021-02-18 | Siemens Healthcare Gmbh | Röntgengerät |
| JP6117922B2 (ja) * | 2013-06-13 | 2017-04-19 | テルモ株式会社 | 医療用マニピュレータおよびその作動方法 |
-
2015
- 2015-12-11 JP JP2015242699A patent/JP6654884B2/ja active Active
-
2016
- 2016-11-30 KR KR1020187019126A patent/KR20180090351A/ko not_active Application Discontinuation
- 2016-11-30 US US16/060,982 patent/US20180360553A1/en not_active Abandoned
- 2016-11-30 CN CN201680072222.1A patent/CN108289715A/zh active Pending
- 2016-11-30 EP EP16872610.7A patent/EP3388015A4/en not_active Withdrawn
- 2016-11-30 WO PCT/JP2016/005034 patent/WO2017098708A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN108289715A (zh) | 2018-07-17 |
| KR20180090351A (ko) | 2018-08-10 |
| JP2017104453A (ja) | 2017-06-15 |
| EP3388015A4 (en) | 2019-07-31 |
| EP3388015A1 (en) | 2018-10-17 |
| WO2017098708A1 (ja) | 2017-06-15 |
| US20180360553A1 (en) | 2018-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6654883B2 (ja) | 外科手術システム、マニピュレータアーム、及びマニピュレータアーム支持体 | |
| JP6654884B2 (ja) | 外科手術システム | |
| WO2017099200A1 (ja) | 外科手術システム | |
| CN108882969B (zh) | 外科手术系统 | |
| US20230000572A1 (en) | Surgical system and method of controlling surgical manipulator arm | |
| US20200107895A1 (en) | Surgical system and patient-side apparatus | |
| US11717366B2 (en) | Medical manipulator | |
| JP2020103889A (ja) | 外科手術システムに使用されるマニピュレータアームおよび患者側システム | |
| US11648067B2 (en) | Medical manipulator and surgical system including the same | |
| JP7017616B2 (ja) | 外科手術システムの患者側装置および外科手術システム | |
| JP6894954B2 (ja) | 医療用マニピュレータおよびこれを備えた外科手術システム | |
| WO2017099242A1 (ja) | 外科手術システム | |
| JP6827517B2 (ja) | 医療用マニピュレータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200131 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6654884 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313114 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |