JP6645238B2 - Eccentric oscillating reduction gear - Google Patents
Eccentric oscillating reduction gear Download PDFInfo
- Publication number
- JP6645238B2 JP6645238B2 JP2016024220A JP2016024220A JP6645238B2 JP 6645238 B2 JP6645238 B2 JP 6645238B2 JP 2016024220 A JP2016024220 A JP 2016024220A JP 2016024220 A JP2016024220 A JP 2016024220A JP 6645238 B2 JP6645238 B2 JP 6645238B2
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- rotator
- rotation
- engagement
- eccentric oscillating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Landscapes
- Valve Device For Special Equipments (AREA)
- Retarders (AREA)
Description
本発明は、偏心揺動型減速装置に関する。 The present invention relates to an eccentric oscillating reduction gear.
従来、特許文献1に記載のように、容器状の回転部材に収容される2つの回転体において180度位相をずらした状態で偏心回転する偏心揺動型減速装置が知られている。2つの回転体を用いる場合、振動または騒音が発生する虞がある。振動または騒音を抑制するために、特許文献2に記載のように、容器状の回転部材に収容される3つの回転体を設けたものがある。 2. Description of the Related Art Conventionally, as described in Patent Document 1, there is known an eccentric oscillating reduction gear device that eccentrically rotates with a phase difference of 180 degrees between two rotating bodies housed in a container-shaped rotating member. When two rotating bodies are used, vibration or noise may occur. In order to suppress vibration or noise, as disclosed in Japanese Patent Application Laid-Open No. H11-163, there is a configuration in which three rotating bodies are provided to be accommodated in a container-shaped rotating member.
特許文献2の構成のように、3つの回転体を用いる場合、偏心揺動型減速装置の軸方向における体格の大型化および偏心揺動型減速装置における部品点数の増加によってコストが増加してしまう。偏心揺動型減速装置を低コストにするため、回転部材に収容される回転体の数を削減し、小型化や部品点数の削減が考えられる。しかしながら、回転体の数を削減し2つの回転体を用いる場合、2つの回転体において回転モーメント(偶力)が働く。これにより、2つの回転体の軸がずれてしまい、2つの回転体による摩擦によって、振動または騒音が発生する虞がある。
When three rotating bodies are used as in the configuration of
本発明は、このような点に鑑みて創作されたものであり、その目的は、振動および騒音の発生を抑制し、小型化可能な偏心揺動型減速装置を提供することにある。 The present invention has been made in view of such a point, and an object of the present invention is to provide an eccentric oscillating reduction gear that can suppress generation of vibration and noise and can be reduced in size.
本発明による偏心揺動型減速装置は、第1回転体(20)、第2回転体(40)、第3回転体(70)および係合部材(74)を備える。
第1回転体は、回転可能で容器状である。
第2回転体は、第1回転体に収容され、少なくとも1つの係合穴(43)を有し、回転可能である。
An eccentric oscillating reduction gear according to the present invention includes a first rotating body (20), a second rotating body (40), a third rotating body (70), and an engagement member (74).
The first rotating body is rotatable and in a container shape.
The second rotating body is housed in the first rotating body, has at least one engagement hole (43), and is rotatable.
第3回転体は、第2回転体に対向して第1回転体に収容され、第1回転体と第2回転体とを回転伝達可能に連結されている。
また、第3回転体は、第1回転体と第2回転体とにおける軸に対して偏心回転することによって、第1回転体と第2回転体との相対回転位相を変化可能にし、第1回転体または第2回転体の回転を加減速可能にする。
係合部材は、少なくとも1つ備えられ、係合穴を介して第2回転体と第3回転体とを係合する。
The third rotating body is accommodated in the first rotating body so as to face the second rotating body, and the first rotating body and the second rotating body are connected so as to be able to transmit rotation.
Further, the third rotator rotates eccentrically with respect to the axis of the first rotator and the second rotator, thereby changing the relative rotation phase between the first rotator and the second rotator. The rotation of the rotating body or the second rotating body can be accelerated / decelerated.
At least one engaging member is provided, and engages the second rotating body and the third rotating body via the engaging hole.
係合部材の側面において、一方の面を基準側面(82)とし、基準側面に対向する側面を対向側面(83)とする。
少なくとも1つの係合部材は、係合部材における軸方向に対して基準側面と対向側面とが対称に傾斜する引力面(80)を有する。
第2回転体は、係合穴の内壁面からなり、第2回転体の内側面において引力面と接触する接触面(81)を有する。接触面は、引力面に沿って形成されている。係合部材における最大径(D1)は、係合穴における最小径(D2)よりも小さい。引力面と接触面との接触部の少なくとも一部は、回転時に第2回転体と第3回転体とが互いに引き合う方向に力が働くように第3回転体から第2回転体に向かって係合部材の径が拡がるように形成されている。
In the side surfaces of the engagement member, one surface is defined as a reference side surface (82), and a side surface facing the reference side surface is defined as an opposite side surface (83).
At least one engagement member has an attractive surface (80) whose reference side surface and opposite side surface are symmetrically inclined with respect to the axial direction of the engagement member.
The second rotator includes an inner wall surface of the engagement hole, and has a contact surface (81) on the inner surface of the second rotator that contacts the attraction surface. The contact surface is formed along the attraction surface. The maximum diameter (D1) of the engagement member is smaller than the minimum diameter (D2) of the engagement hole. At least a part of the contact portion between the attractive surface and the contact surface is engaged from the third rotating body toward the second rotating body such that a force acts in a direction in which the second rotating body and the third rotating body attract each other during rotation. The joining member is formed so that the diameter of the joining member increases.
このように構成することによって、第2回転体と第3回転体とが引き合う方向に力が働くため、第2回転体と第3回転体とが平行に保持される。これによって、第2回転体と第3回転体との摩擦が滑らかになり、振動または騒音を抑制することができる。さらに、振動または騒音を抑制するために、回転体の数が増加する必要がなく部品点数を削減できる。したがって、偏心揺動型減速装置は、小型化可能になる。 With such a configuration, a force acts in a direction in which the second rotator and the third rotator are attracted, so that the second rotator and the third rotator are held in parallel. Thereby, the friction between the second rotating body and the third rotating body becomes smooth, and vibration or noise can be suppressed. Furthermore, in order to suppress vibration or noise, it is not necessary to increase the number of rotating bodies, and the number of parts can be reduced. Therefore, the eccentric oscillating reduction gear can be reduced in size.
以下、本発明の実施形態による偏心揺動型減速装置を図面に基づいて説明する。複数の実施形態の説明において、第1実施形態を実質的に同一の構成には、同一の符号を付して説明を省略する。また、「本実施形態」という場合、第1〜第3実施形態を包括する。これらの実施形態の偏心揺動型減速装置は、例えば、吸気弁および排気弁のうち少なくとも一方のバルブタイミングを調整する内燃機関のバルブタイミング調整装置に用いられる。 Hereinafter, an eccentric oscillating reduction gear according to an embodiment of the present invention will be described with reference to the drawings. In the description of the plurality of embodiments, the same reference numerals are given to substantially the same configuration as the first embodiment, and the description will be omitted. Further, the "first embodiment" includes the first to third embodiments. The eccentric oscillating reduction gears of these embodiments are used, for example, in a valve timing adjustment device of an internal combustion engine that adjusts the valve timing of at least one of an intake valve and an exhaust valve.
本実施形態の偏心揺動型減速装置50に用いられるバルブタイミング調整装置10について説明する。
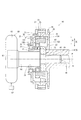
図1に示すように、内燃機関1の駆動軸としてのクランク軸2に固定されるクランク歯車3と、従動軸としてのカム軸4、5に固定される偏心揺動型減速装置50の第1回転体20とにチェーン7が巻き掛けられている。チェーン7を介してクランク軸2からカム軸4、5にトルクが伝達される。一方のカム軸4は吸気弁8を駆動し、他方のカム軸5は排気弁9を駆動する。本実施形態のバルブタイミング調整装置10は、クランク軸2とカム軸4、5とを相対回転位相を変化することにより、吸気弁8または排気弁9の開閉タイミングを調整する。本実施形態の偏心揺動型減速装置50は、クランク軸2とカム軸4、5とを相対回転位相を変化可能にするために用いられる。
The valve
As shown in FIG. 1, a
バルブタイミング調整装置10は、クランク軸2と一体に回転する第1回転体20に対し、カム軸4、5がクランク軸2と同一の回転方向へ相対回転することによって、吸気弁8または排気弁9のバルブタイミングを早くする。このように吸気弁8または排気弁9のバルブタイミングが早くなるようにカム軸4、5が相対回転することを「進角する」という。
The valve
また、バルブタイミング調整装置10は、カム軸4、5がクランク軸2と反対の回転方向へ相対回転することによって、吸気弁8または排気弁9のバルブタイミングを遅くする。このように吸気弁8または排気弁9のバルブタイミングが遅くなるようにカム軸4、5が相対回転することを「遅角する」という。
Further, the valve
(第1実施形態)
図2に示すように、偏心揺動型減速装置50は、第1回転体20、第2回転体40、制御ユニット60および第3回転体70を備える。
第1回転体20は、有底円筒状の歯車部材21と有底円筒状のスプロケット22とを同軸に組み合わせた容器状で回転可能に形成されている。第1回転体20は、一方のカム軸4または他方のカム軸5と同軸に設けられている。
(1st Embodiment)
As shown in FIG. 2, the eccentric oscillating
The first rotating
歯車部材21は、突出部23と第1内歯車部24とを有する。
突出部23は、歯車部材21の径方向内側から径方向外側に突出するように歯車部材21の外壁に形成されている。
第1内歯車部24は、歯先円が歯底円から歯車部材21の径方向内側に向かうように歯車部材21の内周壁に形成されている。
The
The protruding
The first
スプロケット22は、大径部25と小径部26とを有する。
大径部25は、突出部23とねじ27によって嵌合されており、歯車部材21とスプロケット22とが一体に結合されている。
The
The
小径部26は、径方向内側から径方向外側に突出する複数のスプロケット歯29が設けられており、複数のスプロケット歯29とクランク歯車3とにチェーン7が巻き掛けられる。クランク軸2から出力されるトルクがチェーン7を介してスプロケット22に入力されるとき、第1回転体20は、クランク軸2と連動して回転軸Oを中心に回転する。このとき、第1回転体20の回転方向は、本実施形態において図1の反時計方向である。
The
第2回転体40は、第1回転体20に収容され、円板状に形成されており、中央にスリーブボルト41が挿入される中心孔44が形成されている。第2回転体40は、第1回転体20と同軸に設けられ、スリーブボルト41によって一方のカム軸4または他方のカム軸5と連結固定されている。また、第2回転体40は、カム軸4、5と連動してカム軸4、5に対する相対回転位相を保ちつつ、回転軸O周りに回転可能である。また、大径部25の内側で第2回転体は支持され、第1回転体20に対して相対回転可能となっている。さらに、第2回転体40は、係合穴43を有する。
図3に示すように、係合穴43は、軸方向の断面が円形形状で、第2回転体40の内部に8つ形成されている。
The second
As shown in FIG. 3, eight
制御ユニット60は、電動モータ61と制御回路62とによって構成されている。
電動モータ61は、例えば、永久磁石式同期型の3相交流のモータで第1回転体20および第2回転体40を挟んでカム軸4、5とは反対側に設けられている。電動モータ61は、モータケース63に収容され、モータ軸64を有する。モータ軸64は、モータケース63によって正逆回転可能に支持されている。
The
The
制御回路62は、マイコンを主体として構成されており、モータケース63の外部または内部に設けられている。制御回路62における処理は、ROM等の実体的なメモリ装置に予め記憶されたプログラムをCPUで実行することによるソフトウェア処理であってもよいし、専用の電子回路によるハードウェア処理であってもよい。
The
制御回路62は、電動モータ61と接続され、内燃機関1の運転状態に応じて電動モータ61を制御する。制御される電動モータ61は、モータ軸64の回りに回転磁界を発生し、回転磁界の方向に応じ、進角方向Xおよび遅角方向Yに回転トルクをモータ軸34から出力する。
The
第3回転体70は、第1回転体20に収容され、第2回転体40に対向するように設けられている。また、第3回転体70は円筒状に形成されており、第3回転体70とモータ軸64とが連結固定されており、第3回転体70は、モータ軸64と連動して回転軸O周りに回転可能となっている。
第3回転体70は、第3外歯車部71、偏心部72、「付勢部材」としてのスプリング73および係合部材74を有する。
The
The third
第3外歯車部71は、歯先円が歯底円から径方向外側に向かうように第3回転体70の外周壁に形成されている。第3外歯車部71の歯数は、第1内歯車部24の歯数よりも少なく設定され、第3外歯車部71の外周壁は、第1内歯車部24の内周壁と嵌合されている。これによって、第3回転体70は、第1回転体20に対して相対回転可能に支持している。第3外歯車部71と第1内歯車部24との嵌合部を固定部75とする。
The third
偏心部72は、回転軸Oに対して、外周壁が固定部75側に偏心する円筒状に形成されており、中央にモータ軸64が挿入される中心孔76が形成されている。偏心部72は、ベアリング77を介して歯車部材21を中心孔76の内周側から支持している。また、偏心部72は、ベアリング78を介して第3外歯車部71を中心孔76の内周側からされている。この支持によって第3回転体70は、偏心部72の外周壁の中心軸である偏心軸P周りに自転可能であり、かつ、回転軸O周りに公転可能である。したがって、第3回転体70は、遊星運動可能、すなわち、第1回転体20と第2回転体とにおける回転軸Oに対して偏心回転可能となっている。
The
スプリング73は、固定部75側における偏心部72とベアリング78との間に設けられている。スプリング73は、固定部75側にベアリング78を介して第3回転体70を付勢することによって、第3回転体70を歯車部材21に押し付けている。また、後述の係合部材74を第2回転体40に押し付けている。
The
図4に示すように、係合部材74は、第3回転体70の端面79から第2回転体40に向かって突出するように、第3回転体70と一体に形成されている。係合部材74は、係合穴43に挿入され、係合部材74の外側面と係合穴43における第2回転体40の内側面とが嵌合する。係合部材74と係合穴43とは径方向に隙間を隔てて嵌合されており、第1回転体20と第2回転体40とが連結される。また、係合部材74の最大径をD1とし、係合穴43の最小径をD2とする。係合部材74は、最大径D1が係合穴43の最小径D2よりも小さくなるように、すなわち、D1>D2 となるように形成されている。
As shown in FIG. 4, the
(作用)
本実施形態の偏心揺動型減速装置50の作用について説明する。
モータ軸64が第1回転体20に対して相対回転しないとき、第3回転体70が第1回転体20との噛合位置を保ちつつ、第1回転体20と第2回転体40とともに回転する。このとき、第1回転体20と第2回転体40との間の相対回転位相が保持されるので、バルブタイミングが保持される。
(Action)
The operation of the eccentric oscillating
When the
モータ軸64が第1回転体20に対して進角方向Xに相対回転するとき、モータ軸64から進角方向Xに向かって回転トルクが発生する。このとき、第3回転体70と第1回転体20との噛合位置が変化しつつ、第3回転体70が遊星運動することによって、第2回転体40が第1回転体20に対して進角方向Xに向かって相対回転する。第2回転体40の回転が加速され、吸気弁8または排気弁9のバルブタイミングが早くなる。
When the
モータ軸64が遅角方向Yに向かって回転トルクを出力するとき、または、電動モータ61が急停止するとき、第3回転体70と第1回転体20との噛合位置が変化しつつ、第3回転体70が遊星運動する。このとき、第2回転体40が第1回転体20に対して遅角方向Yに相対回転する。第2回転体40の回転が減速され、吸気弁8または排気弁9のバルブタイミングが遅くなる。
When the
このように、第3回転体70が第1回転体20と第2回転体40とを回転伝達可能に連結され、第3回転体70が遊星運動することによって、第1回転体20と第2回転体40との相対回転位相が変化する。相対回転位相が変化するとき、第2回転体40の回転が加減速され、吸気弁8または排気弁9のバルブタイミングが調整される。
As described above, the third
従来では、第1回転体に収容される第2回転体と第3回転体とを用いる場合、2つの回転体において偶力が働き、2つの回転体の軸がずれ、第2回転体と第3回転体とが平行にならないことがあった。第2回転体と第3回転体とが平行にない状態で、第3回転体が遊星運動するとき、第2回転体と第3回転体とが片当たりしながら摩擦するため、振動または騒音が発生していた。また、振動または騒音を抑制するために、特許文献2に記載のように回転体を3つ設ける構成もあるが、部品点数が大きくなり高コストを招く虞があった。
Conventionally, when the second rotating body and the third rotating body accommodated in the first rotating body are used, a couple acts on the two rotating bodies, the axes of the two rotating bodies are shifted, and the second rotating body and the third rotating body are shifted. Sometimes the three rotating bodies did not become parallel. When the third rotator performs a planetary motion in a state where the second rotator and the third rotator are not parallel to each other, the second rotator and the third rotator rub against each other while hitting each other. Had occurred. Further, there is a configuration in which three rotating bodies are provided as described in
そこで、本実施形態では、振動および騒音を抑制し、偏心揺動型減速装置の部品点数を削減可能にするため、第2回転体40および第3回転体70において「ある工夫」をしている。以下、本実施形態における特徴構成について説明する。
Therefore, in the present embodiment, in order to suppress vibration and noise and reduce the number of components of the eccentric oscillating reduction gear, "a certain device" is used in the second
(特徴構成)
図5に示すように、第2回転体40と第3回転体70とを係合する係合部材74は、第2回転体40と第3回転体70とが引き合う方向に力が働く引力面80が側面に形成されている。係合部材74の側面において一方の面を基準側面82とし、基準側面82に対向する面を対向側面83とする。
(Feature configuration)
As shown in FIG. 5, the engaging
引力面80は、互いに対向する基準側面82と対向側面83とが係合部材74おける軸方向に対して対称に傾斜するように、係合部材74の側面に形成されている。第2回転体40は、第2回転体40の内側面において引力面80と接触する接触面81を有する。
接触面81は、引力面80に沿って形成されている。
The
The
引力面80は、第3回転体70から第2回転体40に向かって係合部材74の径が拡がる方向に傾斜するテーパ状に形成されている。また、係合穴43は第3回転体70から第2回転体40に向かって係合穴43の径が拡がる方向に傾斜するように形成されている。これにより、接触面81は、引力面80と同一方向に傾斜するように形成される。
The
引力面80があることによって、第2回転体40と第3回転体70とが互いに引き合う方向に力が働く。引力面80が傾斜しているため、引力面80が接触面81から受ける力Fを軸方向成分の力Ftと径方向成分の力Fdに分解することができる。軸方向成分の力Ftは、第3回転体70から第2回転体40に向かう方向に働く力である。これにより、第2回転体40と第3回転体70とが引き合う。
The presence of the
(効果)
[1]引力面80が係合部材74の側面に形成されていることによって、第2回転体40と第3回転体70とが引き合う方向に力が働く。この引力によって、第2回転体40と第3回転体70とが平行に保持される。これによって、第3回転体70が遊星運動するとき、第2回転体40との摩擦が片当たりしないで滑らかになり、振動または騒音を抑制することができる。さらに、振動または騒音を抑制するために、回転体の数が増加する必要がなく部品点数を削減できる。したがって、偏心揺動型減速装置50は、小型化可能になる。
(effect)
[1] Since the
また、スプリング73の付勢力によって、係合部材74が第2回転体40に押し付けられるため、引力面80が接触面81から受ける力Fが大きくなる。このため、軸方向成分の力Ftが大きくなり、第2回転体40と第3回転体70とに働く引力は大きくなる。このため、スプリング73が設けられていることにより、第2回転体40と第3回転体70とが平行にしやすくすることができる。
Further, since the engaging
[2]係合部材74の最大径D1が係合穴43の最小径D2よりも小さいため、係合部材74が係合穴43に挿入されやすくなる。このため、第3回転体70を収容する歯車部材21と第2回転体40を収容するスプロケット22とが組み立て易くなる。
[2] Since the maximum diameter D1 of the
(第2実施形態)
第2実施形態の構成では、引力面および接触面の形態を除き、第1実施形態と同様である。
図6に示すように、引力面120は、係合部材74における径方向内側から径方向外側に向かって湾曲するように形成されている。また、接触面121は、引力面120に沿って湾曲して形成されている。第2実施形態において、第1実施形態と同様の効果を奏する。さらに、引力面120が湾曲しているため、接触面121との接触面積が大きくなる。接触面積が大きくなることによって、引力面120および接触面121に働く力による面圧が低下し、係合部材74および第2回転体40の耐久性が向上することができる。
(2nd Embodiment)
The configuration of the second embodiment is the same as that of the first embodiment except for the forms of the attractive surface and the contact surface.
As shown in FIG. 6, the
(第3実施形態)
第3実施形態の構成では、第3回転体および係合部材の形態を除き、第1実施形態と同様である。
図7に示すように、第3回転体130は、係合穴43に対応する挿入穴131が形成されている。挿入穴131に係合部材133が挿入されている。
係合部材133は、丸棒形状で第3回転体130と別部材から形成されている。図7において、係合部材133を明確にするために、係合部材133をドット柄で記載している。係合部材133は、第1実施形態と同様に引力面134が形成されている。第3実施形態において、第1実施形態と同様の効果を奏する。
(Third embodiment)
The configuration of the third embodiment is the same as that of the first embodiment except for the forms of the third rotating body and the engagement member.
As shown in FIG. 7, the third
The
(その他の実施形態)
(i)係合部材および係合穴は、少なくとも1つ形成されていればよい。係合部材および係合穴の数に限らず、第1実施形態と同様の効果を奏する。
(Other embodiments)
(I) At least one engaging member and at least one engaging hole may be formed. The same effects as in the first embodiment can be obtained without being limited to the number of the engagement members and the engagement holes.
(ii)第2実施形態の思想を共有する他の実施形態では、図8に示すように、引力面122は、第3回転体70の端面79から係合部材74の中央にかけて、径方向外側から径方向内側に向かって湾曲するように形成されている。また、引力面122は、係合部材74の中央から係合部材74の端面174にかけて、径方向外側から径方向内側に向かって湾曲するように形成されている。また、接触面123は、引力面122に沿って湾曲するように形成されている。図8において、特徴構成をわかりやすくするために、湾曲部を誇張して記載している。このような構成において、第2実施形態と同様の効果を奏する。
(Ii) In another embodiment that shares the concept of the second embodiment, as shown in FIG. 8, the
(iii)第3実施形態の思想を共有する他の実施形態では、図9に示すように、第3実施形態に第1実施形態の思想を組み合わせてもよい。丸棒形状の係合部材133と、第3回転体140の端面143から第2回転体40に向かって突出するように設けられる係合部材144との両方を形成してもよい。
以上、本発明はこのような実施形態に限定されるものではなく、発明の趣旨を逸脱しない範囲において、種々の形態で実施することができる。
(Iii) In another embodiment sharing the idea of the third embodiment, the idea of the first embodiment may be combined with the third embodiment, as shown in FIG. Both the round bar-shaped engaging
As described above, the present invention is not limited to such an embodiment, and can be implemented in various forms without departing from the spirit of the invention.
20 ・・・第1回転体、
40 ・・・第2回転体、
43 ・・・係合穴、
70 ・・・第3回転体、
74 ・・・係合部材、
80 ・・・引力面、
81 ・・・接触面、
82 ・・・基準側面、
83 ・・・対向側面。
20 ... first rotating body,
40 ... second rotating body,
43 ... engagement hole
70 ... third rotating body,
74 engagement members,
80 ・ ・ ・ attraction surface
81 ... contact surface,
82 ... reference side surface,
83 ··· Opposite side surface.
Claims (3)
前記第1回転体に収容され、少なくとも1つの係合穴(43)を有し、回転可能な第2回転体(40)と、
前記第2回転体に対向して前記第1回転体に収容され、前記第1回転体と前記第2回転体とを回転伝達可能に連結されており、前記第1回転体における軸に対して偏心回転することによって前記第1回転体と前記第2回転体との相対回転位相を変化可能にし、前記第1回転体または前記第2回転体の回転を加減速可能な第3回転体(70)と、
前記係合穴を介して前記第2回転体と前記第3回転体とを係合する少なくとも1つの係合部材(74)と、
を備え、
前記係合部材の側面において一方の面を基準側面(82)とし、
前記基準側面に対向する面を対向側面(83)とすると、
少なくとも1つの前記係合部材は、前記基準側面と前記対向側面とが前記係合部材における軸方向に対して対称に傾斜する引力面(80)を有し、
前記第2回転体は、前記係合穴の内壁面からなり、前記第2回転体の内側面において前記引力面と接触する接触面(81)を有し、
前記接触面は、前記引力面に沿って形成されており、
前記係合部材における最大径(D1)は、前記係合穴における最小径(D2)よりも小さく、
前記引力面と前記接触面との接触部の少なくとも一部は、回転時に前記第2回転体と前記第3回転体とが互いに引き合う方向に力が働くように前記第3回転体から前記第2回転体に向かって前記係合部材の径が拡がるように形成されている偏心揺動型減速装置。 A rotatable container-like first rotator (20);
A second rotating body (40) housed in the first rotating body, having at least one engagement hole (43), and being rotatable;
The first rotator is accommodated in the first rotator so as to face the second rotator, and the first rotator and the second rotator are connected so as to be able to transmit rotation. The third rotator (70) capable of changing the relative rotation phase between the first rotator and the second rotator by eccentric rotation and capable of accelerating and decelerating the rotation of the first rotator or the second rotator. )When,
At least one engaging member (74) for engaging the second rotating body and the third rotating body via the engaging hole;
With
One of the side surfaces of the engagement member is set as a reference side surface (82),
Assuming that a surface facing the reference side surface is a facing side surface (83),
At least one of the engagement members has an attractive surface (80) in which the reference side surface and the opposite side surface are symmetrically inclined with respect to an axial direction of the engagement member.
The second rotating body includes an inner wall surface of the engagement hole, and has a contact surface (81) that is in contact with the attraction surface on an inner surface of the second rotating body.
The contact surface is formed along the attraction surface,
Maximum diameter (D1) in the engaging member, rather smaller than the minimum diameter (D2) in said engagement hole,
At least a part of the contact portion between the attraction surface and the contact surface is separated from the third rotator so as to exert a force in a direction in which the second rotator and the third rotator attract each other during rotation. An eccentric oscillating type speed reducer formed so that the diameter of the engaging member increases toward the rotating body .
前記接触面は、前記引力面に沿って湾曲するように形成されている請求項1に記載の偏心揺動型減速装置。 The attraction surface is formed to be at least partially curved,
The eccentric oscillating reduction gear according to claim 1, wherein the contact surface is formed to be curved along the attraction surface.
前記第1回転体と連動して回転可能なクランク軸(2)と、
前記第2回転体と連動して回転可能なカム軸(4)と、
を備え、
前記クランク軸からの回転伝達により前記カム軸が開閉する吸気弁(8)および排気弁(9)のうち少なくとも一方のバルブタイミングを調整する内燃機関(1)のバルブタイミング調整装置。 An eccentric oscillating type reduction gear transmission according to claim 1 or 2 ,
A crankshaft (2) rotatable in conjunction with the first rotating body;
A camshaft (4) rotatable in conjunction with the second rotating body;
With
A valve timing adjusting device for an internal combustion engine (1) for adjusting at least one valve timing of an intake valve (8) and an exhaust valve (9) that open and close the camshaft by rotation transmission from the crankshaft.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016024220A JP6645238B2 (en) | 2016-02-11 | 2016-02-11 | Eccentric oscillating reduction gear |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016024220A JP6645238B2 (en) | 2016-02-11 | 2016-02-11 | Eccentric oscillating reduction gear |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017141752A JP2017141752A (en) | 2017-08-17 |
| JP2017141752A5 JP2017141752A5 (en) | 2018-08-23 |
| JP6645238B2 true JP6645238B2 (en) | 2020-02-14 |
Family
ID=59627777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016024220A Expired - Fee Related JP6645238B2 (en) | 2016-02-11 | 2016-02-11 | Eccentric oscillating reduction gear |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6645238B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6686695B2 (en) | 2016-05-20 | 2020-04-22 | 株式会社デンソー | Eccentric swing type reduction gear |
| JP7006023B2 (en) * | 2017-08-30 | 2022-01-24 | 株式会社デンソー | Eccentric swing type speed reducer |
| JP7131445B2 (en) * | 2019-03-18 | 2022-09-06 | 株式会社デンソー | valve timing adjuster |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04105906U (en) * | 1991-02-27 | 1992-09-11 | 株式会社アツギユニシア | Internal combustion engine valve timing control device |
| JP4265834B2 (en) * | 1999-03-03 | 2009-05-20 | 住友重機械工業株式会社 | Inner and outer rollers having an intermeshing planetary gear structure and manufacturing method thereof |
| JP4438768B2 (en) * | 2006-04-27 | 2010-03-24 | 株式会社デンソー | Valve timing adjustment device |
| JP5807355B2 (en) * | 2011-03-22 | 2015-11-10 | セイコーエプソン株式会社 | Reducer, robot hand and robot |
-
2016
- 2016-02-11 JP JP2016024220A patent/JP6645238B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017141752A (en) | 2017-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4390078B2 (en) | Valve timing adjustment device | |
| JP2016023591A (en) | Valve timing adjustment device | |
| JP6645238B2 (en) | Eccentric oscillating reduction gear | |
| JP2009013964A (en) | Valve timing adjusting device | |
| JP6443382B2 (en) | Valve timing adjustment device | |
| JP2006299867A (en) | Valve timing control device for internal combustion engine | |
| JP2018151052A (en) | Eccentric oscillation type reduction gear | |
| JP4760953B2 (en) | Valve timing adjustment device | |
| JP2018165532A (en) | Gear speed reducer | |
| US10557386B2 (en) | Valve timing controller | |
| JP6228065B2 (en) | Valve timing adjustment device | |
| JP6686695B2 (en) | Eccentric swing type reduction gear | |
| JP2009185786A (en) | Valve timing adjusting device | |
| JP2017141752A5 (en) | ||
| JP2005048706A (en) | Valve timing adjusting device | |
| JP2020125688A (en) | Valve timing adjustment device | |
| JP2016118107A (en) | Valve timing adjustment apparatus | |
| JP5920096B2 (en) | Valve timing adjustment device | |
| JP7131445B2 (en) | valve timing adjuster | |
| WO2020137782A1 (en) | Valve timing adjustment device | |
| JP2009074398A (en) | Valve timing adjusting device | |
| JP6939267B2 (en) | Eccentric swing type speed reducer | |
| JP2021046807A (en) | Valve timing adjustment device | |
| JP2020079562A (en) | Connecting unit, electric motor and valve timing change device | |
| JP2021046844A (en) | Valve timing adjustment device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190723 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191223 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6645238 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |