JP6638471B2 - Motor control device and electric power steering device equipped with the same - Google Patents
Motor control device and electric power steering device equipped with the same Download PDFInfo
- Publication number
- JP6638471B2 JP6638471B2 JP2016037716A JP2016037716A JP6638471B2 JP 6638471 B2 JP6638471 B2 JP 6638471B2 JP 2016037716 A JP2016037716 A JP 2016037716A JP 2016037716 A JP2016037716 A JP 2016037716A JP 6638471 B2 JP6638471 B2 JP 6638471B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- command value
- back electromotive
- control
- current command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000006870 function Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 11
- 238000001514 detection method Methods 0.000 description 8
- 230000035945 sensitivity Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000008571 general function Effects 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images








Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
本発明は、電流指令値に基づく電流フィードバックでモータを駆動し、電流指令値にモータ実電流を追従させて制御するモータ制御装置及びそれを搭載し、少なくとも操舵トルクに基づいて演算された電流指令値により、車両の操舵系にモータによるアシスト力を付与する電動パワーステアリング装置に関する。特にノイズに対する感度を変化させずに、モータ駆動時の逆起電圧の相殺を行う共に、ノイズ補償及びLPFの補償を行う補償誤差相殺用の角度フィルタをフィードバック経路に介挿したモータ制御装置及びそれを搭載した電動パワーステアリング装置に関する。 The present invention provides a motor control device that drives a motor with current feedback based on a current command value, controls the current command value by following a motor actual current, and includes the motor control device, and at least a current command calculated based on a steering torque. The present invention relates to an electric power steering device that applies an assist force by a motor to a steering system of a vehicle according to a value. In particular, a motor control device in which a back electromotive voltage during motor driving is canceled without changing the sensitivity to noise, and a compensation error canceling angle filter for noise compensation and LPF compensation inserted in a feedback path, and a motor control device therefor. The present invention relates to an electric power steering device equipped with a.
モータ制御装置を搭載した電動パワーステアリング装置(EPS)は、車両のステアリング機構にモータの回転力で操舵補助力(アシスト力)を付与するものであり、インバータで制御されるモータの駆動力を、ギア等の伝達機構により、ステアリングシャフト或いはラック軸に操舵補助力を付与する。かかる従来の電動パワーステアリング装置は、操舵補助力のトルクを正確に発生させるため、モータ電流のフィードバック制御を行っている。フィードバック制御は、操舵補助指令値(電流指令値)とモータ電流検出値との差が小さくなるようにモータ印加電圧を調整するものであり、モータ印加電圧の調整は、一般的にPWM(パルス幅変調)制御のデューティの調整で行っている。 2. Description of the Related Art An electric power steering device (EPS) equipped with a motor control device applies a steering assisting force (assisting force) to a steering mechanism of a vehicle by a rotational force of a motor. A steering assist force is applied to the steering shaft or the rack shaft by a transmission mechanism such as a gear. Such a conventional electric power steering device performs feedback control of a motor current in order to accurately generate a torque of a steering assist force. The feedback control is to adjust the motor applied voltage so that the difference between the steering assist command value (current command value) and the detected motor current value is small. The adjustment of the motor applied voltage is generally performed by PWM (pulse width). Modulation) control by adjusting the duty.
電動パワーステアリング装置の一般的な構成を図1に示して説明すると、ハンドル1のコラム軸(ステアリングシャフト、ハンドル軸)2は減速ギア3、ユニバーサルジョイント4a及び4b、ピニオンラック機構5、タイロッド6a,6bを経て、更にハブユニット7a,7bを介して操向車輪8L,8Rに連結されている。また、コラム軸2には、ハンドル1の操舵トルクThを検出するトルクセンサ10及び操舵角θを検出する舵角センサ14が設けられており、ハンドル1の操舵力を補助するモータ20が減速ギア3を介してコラム軸2に連結されている。電動パワーステアリング装置を制御するコントロールユニット(ECU)30には、バッテリ13から電力が供給されると共に、イグニションキー11を経てイグニションキー信号が入力される。コントロールユニット30は、トルクセンサ10で検出された操舵トルクThと車速センサ12で検出された車速Vsとに基づいてアシスト(操舵補助)指令の電流指令値の演算を行い、電流指令値に補償等を施した電圧制御指令値Vrefによって、EPS用モータ20に供給する電流を制御する。
A general configuration of the electric power steering apparatus will be described with reference to FIG. 1. 6b, and further connected to steered
なお、舵角センサ14からは操舵角θが検出され、モータ20に連結されたレゾルバ等の回転センサから操舵角を取得することも可能である。
The steering angle θ is detected from the
コントロールユニット30には、車両の各種情報を授受するCAN(Controller Area Network)40が接続されており、車速VsはCAN40から受信することも可能である。また、コントロールユニット30には、CAN40以外の通信、アナログ/ディジタル信号、電波等を授受する非CAN41も接続可能である。
The
コントロールユニット30は主としてCPU(MPUやMCU等も含む)で構成されるが、そのCPU内部においてプログラムで実行される一般的な機能を示すと図2のようになる。
The
図2を参照してコントロールユニット30を説明すると、トルクセンサ10で検出された操舵トルクTh及び車速センサ12で検出された(若しくはCAN40からの)車速Vsは、電流指令値Iref1を演算する電流指令値演算部31に入力される。電流指令値演算部31は、入力された操舵トルクTh及び車速Vsに基づいてアシストマップ等を用いて、モータ20に供給する電流の制御目標値である電流指令値Iref1を演算する。電流指令値Iref1は加算部32Aを経て電流制限部33に入力され、最大電流を制限された電流指令値Irefmが減算部32Bに入力され、フィードバックされているモータ電流値Imとの偏差ΔI(=Irefm−Im)が演算され、その偏差ΔIが操舵動作の特性改善のためのPI制御部34に入力される。PI制御部34で特性改善された電圧制御指令値VrefがPWM制御部35に入力され、更にインバータ36を介してモータ20がPWM駆動される。モータ20の電流値Imはモータ電流検出器37で検出され、減算部32Bにフィードバックされる。インバータ36は、半導体スイッチング素子としてのFETのブリッジ回路で構成されている。
Referring to FIG. 2, the
モータ20にはレゾルバ等の回転センサ21が連結されており、回転センサ21からモータ回転角度θが出力され、更にモータ速度ωがモータ速度演算部22で演算される。
A
また、加算部32Aには補償信号生成部38からの補償信号CMが加算されており、補償信号CMの加算によって操舵システム系の特性補償を行い、収れん性や慣性特性等を改善するようになっている。補償信号生成部38は、セルフアライニングトルク(SAT)38−1と慣性38−2を加算部38−4で加算し、その加算結果に更に収れん性38−3を加算部38−5で加算し、加算部38−5の加算結果を補償信号CMとしている。
Further, the compensation signal CM from the
このような電動パワーステアリング装置のモータ制御装置では、モータ駆動時にモータ20が逆起電圧を発生するため、モータ逆起電圧を抑制若しくは減衰するための補償が必要である。その理由を以下に説明する。
In such a motor control device of the electric power steering device, since the
電流指令値Irefからモータ20が駆動される制御系を伝達関数で示すと、図3のようになる。電流指令値Irefは制御フィルタ(GFF)101を経て減算部104に入力され、実モータ電流Imnとの偏差e1が算出される。偏差e1は制御フィルタ(GFB)を経て減算部105に入力され、減算部105でモータ20の逆起電圧EMFが減算され、その差分e3がモータ20の電気系特性部110(1/(L・s+R))を経て、更にトルク定数Kt[Nm/A]を経て機械系特性部120(1/(J・s+D))に入力される。逆起電圧EMFは、機械特性部120の出力であるモータ角速度(モータ回転数)ωmに逆起電圧定数Ke[V/(rad/s)]を乗算して得られる。電気系特性部110からのモータ電流Imは検出されてフィードバックされるが、実際には電流検出ノイズNiが混入し、実モータ電流Imnとしてフィードバックされる。
FIG. 3 shows a control system in which the
電気系特性部110のLはモータインダクタンス[H]、Rはモータ抵抗[Ω]であり、機械系特性部120のJはモータ慣性モーメント[Kg・m2]、Dはモータ粘性係数[Nm/(rad/s)]である。
L of an
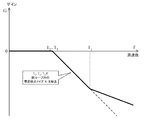
電流指令値Irefからモータ電流Imまでの系を、図4に示すように周波数帯域を制御し易い1次フィルタ(1/(T4・s+1))とするため、T1〜T4を時定数として、制御フィルタ(GFF)101の伝達関数は下記数1で設定され、制御フィルタ(GFB)102の伝達関数は下記数2で設定されている。
The system from the current command value Iref until the motor current Im, FIG. 4 to control the frequency band as shown in easily primary filter (1 / (T 4 · s + 1)) and to order,

![]()
![]()
このように、制御フィルタ(GFF)101及び制御フィルタ(GFB)102の設定では、モータ逆起電圧EMFの混入を考慮していない。しかしながら、モータ逆起電圧EMFの発生は、電流指令値に影響を与えるため、モータ出力を正確に制御する上で大きな問題となる。このような対策として、モータ逆起電圧の補償が考えられ、例えば特開2013−219870号公報(特許文献1)では、電圧指令値及び電流検出値に基づいてモータの逆起電圧を推定し、逆起電圧推定値を電流指令値に加算するようにしている。また、特開2012−236472号公報(特許文献2)では、回転角速度に基づいて逆起電圧を推定し、この推定逆起電圧に補償係数を乗じて逆起電圧補償制御値を算出し、逆起電圧補償制御値を基本電圧に加算して電圧指令値としている。 As described above, the setting of the control filter (G FF ) 101 and the control filter (G FB ) 102 does not take into account the mixing of the motor back electromotive voltage EMF. However, since the generation of the motor back electromotive voltage EMF affects the current command value, it is a serious problem in accurately controlling the motor output. As such a countermeasure, compensation of a motor back electromotive voltage can be considered. For example, in Japanese Patent Application Laid-Open No. 2013-219870 (Patent Document 1), a back electromotive voltage of a motor is estimated based on a voltage command value and a current detection value. The back electromotive force estimated value is added to the current command value. In Japanese Patent Application Laid-Open No. 2012-236472 (Patent Document 2), a back electromotive force is estimated based on a rotational angular velocity, and a back electromotive voltage compensation control value is calculated by multiplying the estimated back electromotive voltage by a compensation coefficient. The electromotive voltage compensation control value is added to the basic voltage to obtain a voltage command value.
上述のような逆起電圧補償はいずれも、位置や回転速度の検出ノイズが混入しないことを前提にして補償しているが、実際には検出ノイズが混入するため、電流指令値に対して正確にモータ出力を追従させることができない課題がある。 All of the above-mentioned back electromotive force compensations are performed on the assumption that detection noise of position and rotation speed does not mix. However, there is a problem that the motor output cannot be followed.
本発明は上述のような事情よりなされたものであり、本発明の目的は、ノイズに対する感度を変化させずに、広範囲にわたって遅れなく、逆起電圧及び逆起電圧補償経路の特性をフィードバック経路で補償し、実電流を電流指令値に確実に追従させるモータ制御装置を提供すると共に、操舵フィーリングを向上した電動パワーステアリング装置を提供することにある。 The present invention has been made in view of the above circumstances, and an object of the present invention is to change the characteristics of a back electromotive force and a back electromotive voltage compensation path in a feedback path without delay over a wide range without changing the sensitivity to noise. It is an object of the present invention to provide a motor control device for compensating and reliably tracking an actual current to a current command value, and to provide an electric power steering device with improved steering feeling.
本発明は、電流指令値に基づく電流フィードバック制御でモータを駆動制御すると共に、モータ角度若しくはモータ角速度に基づく逆起電圧補償信号によりモータ逆起電圧の補償を行うモータ制御装置に関し、本発明の上記目的は、前記モータ逆起電圧を補償する経路にノイズ除去用のLPFが設けられると共に、前記モータ制御のフィードバック経路に、前記モータ逆起電圧と前記逆起電圧補償信号との差である逆起電圧補償誤差を相殺する角度フィードバックフィルタが設けられていることにより達成される。 The present invention relates to a motor control device that controls driving of a motor by current feedback control based on a current command value and compensates for a motor back electromotive voltage by a back electromotive force compensation signal based on a motor angle or a motor angular velocity. An object of the present invention is to provide an LPF for removing noise in a path for compensating the motor back electromotive voltage, and to provide a back electromotive force, which is a difference between the motor back electromotive voltage and the back electromotive voltage compensation signal, in a feedback path of the motor control. This is achieved by providing an angle feedback filter that cancels the voltage compensation error.
本発明の上記目的は、前記モータの制御がdq軸ベクトル制御であることにより、或いは前記電流指令値がdq軸電流指令値であり、前記制御部が2相フィードバック式ベクトル制御系であることにより、或いは前記電流指令値がdq軸電流指令値であり、前記制御部が3相フィードバック式ベクトル制御系であることにより、より効果的に達成され、いずれかのモータ制御装置を電動パワーステアリング装置に搭載することにより、操舵感の良い電動パワーステアリング装置を提供することができる。 The object of the present invention is that the motor control is dq-axis vector control, or the current command value is a dq-axis current command value, and the control unit is a two-phase feedback vector control system. Alternatively, the current command value is a dq-axis current command value, and the control unit is a three-phase feedback vector control system, which is more effectively achieved. By mounting, an electric power steering device with a good steering feeling can be provided.
本発明に係るモータ制御装置によれば、モータ駆動時のモータ逆起電圧の補償機能を有するモータ制御装置において、フィードバック経路に、モータ逆起電圧と逆起電圧補償信号との差である逆起電圧補償誤差を相殺する角度フィードバックフィルタを介挿しているので、ノイズに対する感度を変化させずに、遅れなくモータの追従特性を向上することができる。 According to the motor control device of the present invention, in the motor control device having the function of compensating for the motor back electromotive voltage at the time of driving the motor, the feedback path includes a back electromotive force that is a difference between the motor back electromotive voltage and the back electromotive voltage compensation signal. Since the angle feedback filter for canceling the voltage compensation error is interposed, the following characteristic of the motor can be improved without delay without changing the sensitivity to noise.
本発明のモータ制御装置は、ノイズに対する感度を変化させずに、モータ駆動時の逆起電圧発生の補償を行うと共に、ノイズ補償及びLPFの補償を行う補償誤差相殺用の角度フィルタをフィードバック経路に介挿している。これにより、ノイズに対する感度を変化させずに遅れなく、正確に実モータ電流を電流指令値に追従させることができる。
本発明は、ブラシレスモータを駆動制御するベクトル制御系についても適用できるので、先ずベクトル制御系について説明する。
The motor control apparatus of the present invention, without altering the sensitivity to noise, both when performing the compensation of the back electromotive voltage generated at motor drive, feedback the angular filter for compensating the error offset for compensating for noise compensation and LPF path Has been inserted. This allows the actual motor current to accurately follow the current command value without delay without changing the sensitivity to noise .
Since the present invention can be applied to a vector control system for driving and controlling a brushless motor, the vector control system will be described first.
図6のベクトル制御系では、d軸電流指令値id及びq軸電流指令値iqを演算して補正する電流指令値演算部220が設けられており、電流指令値演算部220には操舵トルクTh、車速Vs、モータ100に連結された回転センサ100Aからモータ角度(回転角度)θe、角速度演算部226で演算されたモータ角速度ωが入力されている。電流指令値演算部220で演算されたd軸電流指令値id及びq軸電流指令値iqは2相/3相変換部221に入力され、モータ角度θeに同期して3相の電流指令値Iuref,Ivref,Iwrefに変換される。3相の電流指令値Iuref,Ivref,Iwrefは減算部222(222u,222v,222w)に入力され、電流検出回路225Aで検出されたモータ電流Imu,Imv,Imwとの偏差ΔIu,ΔIv,ΔIwが算出される。算出された偏差ΔIu,ΔIv,ΔIwはPI制御部223に入力され、電流制御された3相の電圧制御指令値Vuref,Vvref,VwrefがPWM制御部224に入力され、PWM制御部224で演算された各相dutyに基づいてインバータ225を介してモータ100が駆動される。
The vector control system of FIG. 6, and the current command
なお、図6では、電流検出回路225Aはインバータ225内に設けられているが、モータ100への供給線等でも検出可能である。
Although the
また、図7のベクトル制御系では、電流検出回路225Aで検出された3相のモータ電流Imu,Imv,Imwをモータ角度θeに同期して2相に変換する3相/2相変換部227が設けられている。電流指令値演算部220で演算され補正されたd軸電流指令値id及びq軸電流指令値iqは減算部222(222d、222q)に入力され、減算部222で3相/2相変換部227からの2相の電流Imd,Imqとの偏差Δid,Δiqが算出される。偏差Δid,Δiqは2相/3相変換部221に入力され、変換された3相の電流指令値Iuref,Ivref,IwrefがPI制御部223に入力され、以降は図4の場合と同様な動作が実行される。
Also, in the vector control system of FIG. 7, the
図6の制御系は、3相のモータ電流Imu,Imv,Imwがフィードバックされる3相フィードバック式ベクトル制御系であり、図7の制御系は、3相のモータ電流Imu,Imv,Imwが2相電流Imd,Imqに変換されてフィードバックされる2相フィードバック式ベクトル制御系である。本発明は、上記3相フィードバック式ベクトル制御系及び2相フィードバック式ベクトル制御系のいずれにも適用できる。 The control system of FIG. 6 is a three-phase feedback vector control system in which three-phase motor currents Imu, Imv, Imw are fed back. The control system of FIG. 7 has two-phase motor currents Imu, Imv, Imw of two. This is a two-phase feedback vector control system that is converted into phase currents Imd and Imq and fed back. The present invention can be applied to both the three-phase feedback vector control system and the two-phase feedback vector control system.
図8は、回転センサ(例えばレゾルバ)で検出されるモータ角度θmに基づいて、逆起電圧EMFを補償する場合の構成例を、図3に対応させて示している。モータ角度θmは微分部130で微分されるが、実際には回転センサ(例えばレゾルバ)にはノイズNrが含まれており、加算部133でノイズNrが加算(混入)されたモータ角度θmrが微分部130に入力される。微分部130で微分されたモータ角速度ωnは、伝達関数が数5で表されるノイズ除去用のローパスフィルタ(LPF)131に入力され、LPF131でノイズNrを除去されたモータ角速度ωn’は、逆起電圧補償定数部132で逆起電圧補償定数Ke’を乗算され、逆起電圧補償信号EMFcとして加算部106に入力される。
FIG. 8 shows a configuration example in which the back electromotive force EMF is compensated based on the motor angle θm detected by a rotation sensor (for example, a resolver), corresponding to FIG. Although the motor angle θm is differentiated by the
なお、LPF131のωLは、カットオフ周波数fc(例えば40Hz)に対してωL=2πfcの関係を有している。 Incidentally, omega L of LPF131 have a relation of ω L = 2πf c relative to the cutoff frequency f c (e.g. 40 Hz).
![]()
![]()
このLPF131のフィルタ処理により、モータ回転数の周波数が上がると、モータ逆起電圧EMFに対して位相が遅れ、完全にモータ逆起電圧EMFを相殺できない可能性がある。この相殺誤差が外乱として電流制御系内に混入して、フィードバック制御の役割である実モータ電流Imを電流指令値Irefに追従させることができなくなる。逆起電圧補償が完全であれば、下記数6の関係となるべきである。
When the frequency of the motor rotation speed increases due to the filter processing of the
(数6)
EMFc−EMF=0
しかしながら、ノイズNrの混入により、上記数6は成立しない。そもそも、電流フィードバック制御の主な役割は電流指令値通りに、遅れなく実電流を流すことである。フィルタ処理による制御では、制御帯域が高いほど追従性を改善することができるが、ノイズに対しても感度が上がってしまい、電動パワーステアリング装置では操舵感が悪化する。
(Equation 6)
EMFc−EMF = 0
However, Equation 6 does not hold due to the mixing of the noise Nr. In the first place, the main role of the current feedback control is to flow the actual current without delay according to the current command value. In the control by the filter processing, the higher the control band, the better the followability can be, but the sensitivity to noise also increases, and the steering feeling of the electric power steering device deteriorates.
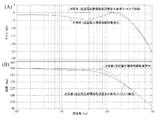
図9はLPFを用いて逆起電圧補償を行う場合の周波数特性を示しており、図9(A)はゲインの周波数特性であり、本発明による対策前は、周波数10〜100Hzの領域でゲインが凹状に低下している。また、図9(B)は位相の周波数特性であり、本発明による対策前は、位相の遅れと進みが存在して平坦特性ではなく、逆起電圧EMFを完全に補償することができず、補償相殺誤差が外乱として制御ループに混入し、これが要因で検出電流は電流指令値に追従できない状況となっている。 FIG. 9 shows frequency characteristics when back electromotive force compensation is performed using an LPF, and FIG. 9 (A) shows the frequency characteristics of the gain. Before the countermeasure according to the present invention, the gain in the frequency range of 10 to 100 Hz is obtained. Are concavely lowered. FIG. 9B shows the frequency characteristics of the phase. Before the countermeasure according to the present invention, there is a delay and advance of the phase, so that the characteristics are not flat, and the back electromotive force EMF cannot be completely compensated. The compensation cancellation error is mixed in the control loop as a disturbance, and as a result, the detected current cannot follow the current command value.
その対策のため、本発明では電流追従特性がIm/Iref=1/(T4・s+1)となるような角度フィードバック(FB)フィルタ(GANG)200を、モータ制御のフィードバック経路に介挿する。図10はその構成を図8に対応させて示している。 As a countermeasure, in the present invention, an angle feedback (FB) filter (G ANG ) 200 having a current follow-up characteristic of Im / Iref = 1 / (T 4 · s + 1) is inserted in a feedback path for motor control. . FIG. 10 shows the configuration corresponding to FIG.
電流指令値Irefから電気系特性部110で出力されるモータ電流Imまでを伝達関数で表わすと、下記数7となる。制御フィルタ(GFF)101の伝達関数は上述した数1であり、制御フィルタ(GFB)102の伝達関数は上述した数2である。
When the range from the current command value Iref to the motor current Im output by the electric system
![]()
![]()
よって、数9から角度フィードバックフィルタGANGを算出すると、数10となる。 Therefore, when the angle feedback filter GANG is calculated from Expression 9, Expression 10 is obtained.
1 ハンドル
2 コラム軸(ステアリングシャフト、ハンドル軸)
10 トルクセンサ
12 車速センサ
20、100 モータ
30 コントロールユニット(ECU)
31、220 電流指令値演算部
34、223 PI制御部
35、224 PWM制御部
36、225 インバータ
101,102 制御フィルタ
110 電気系特性部
120 機械系特性部
131 ローパスフィルタ(LPF)
200 角度フィードバック(FB)フィルタ
221 2相/3相変換部
227 3相/2相変換部
1
10
31, 220 Current command
200 Angle feedback (FB)
Claims (5)
前記モータ逆起電圧を補償する経路にノイズ除去用のLPFが設けられると共に、前記モータ制御のフィードバック経路に、前記モータ逆起電圧と前記逆起電圧補償信号との差である逆起電圧補償誤差を相殺する角度フィードバックフィルタが設けられていることを特徴とするモータ制御装置。 In a motor control device that drives and controls a motor by current feedback control based on a current command value and compensates for a motor back electromotive voltage by a back electromotive force compensation signal based on a motor angle or a motor angular velocity,
An LPF for removing noise is provided in a path for compensating the motor back electromotive voltage, and a back electromotive voltage compensation error which is a difference between the motor back electromotive voltage and the back electromotive voltage compensation signal is provided in the motor control feedback path. A motor control device, comprising: an angle feedback filter for canceling out.
An electric power steering device equipped with the motor control device according to claim 1.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016037716A JP6638471B2 (en) | 2016-02-29 | 2016-02-29 | Motor control device and electric power steering device equipped with the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016037716A JP6638471B2 (en) | 2016-02-29 | 2016-02-29 | Motor control device and electric power steering device equipped with the same |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017154548A JP2017154548A (en) | 2017-09-07 |
| JP2017154548A5 JP2017154548A5 (en) | 2019-02-28 |
| JP6638471B2 true JP6638471B2 (en) | 2020-01-29 |
Family
ID=59807979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016037716A Active JP6638471B2 (en) | 2016-02-29 | 2016-02-29 | Motor control device and electric power steering device equipped with the same |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6638471B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019088927A1 (en) * | 2017-11-03 | 2019-05-09 | E-Synergy Graphene Research Pte. Ltd. | System and method for suppressing a back electromotive force |
-
2016
- 2016-02-29 JP JP2016037716A patent/JP6638471B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017154548A (en) | 2017-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6338030B1 (en) | Electric power steering device | |
| JP6512333B2 (en) | Electric power steering device | |
| JP6658995B2 (en) | Motor control device and electric power steering device equipped with the same | |
| JP6601595B2 (en) | Motor control device and electric power steering device equipped with the same | |
| JP6597824B2 (en) | Electric power steering device | |
| US10177699B2 (en) | Motor control unit and electric power steering apparatus equipped with the same | |
| JP6521185B2 (en) | Electric power steering device | |
| JP6658972B2 (en) | Motor control device and electric power steering device equipped with the same | |
| JP2019097385A (en) | Electric power steering device | |
| JP2007325409A (en) | Motor controller | |
| JP5397664B2 (en) | Motor control device | |
| JP6648592B2 (en) | Motor control device and electric power steering device equipped with the same | |
| JP6690798B2 (en) | Electric power steering device | |
| JP6638471B2 (en) | Motor control device and electric power steering device equipped with the same | |
| JP6597372B2 (en) | Motor control device and electric power steering device equipped with the same | |
| JP6677016B2 (en) | Motor control device and electric power steering device equipped with the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191209 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6638471 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |