JP6593995B2 - 空港監視装置 - Google Patents
空港監視装置 Download PDFInfo
- Publication number
- JP6593995B2 JP6593995B2 JP2015012131A JP2015012131A JP6593995B2 JP 6593995 B2 JP6593995 B2 JP 6593995B2 JP 2015012131 A JP2015012131 A JP 2015012131A JP 2015012131 A JP2015012131 A JP 2015012131A JP 6593995 B2 JP6593995 B2 JP 6593995B2
- Authority
- JP
- Japan
- Prior art keywords
- target object
- detection
- airport
- dimensional
- tracking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012806 monitoring device Methods 0.000 title claims description 7
- 238000001514 detection method Methods 0.000 claims description 81
- 238000000034 method Methods 0.000 claims description 39
- 238000012544 monitoring process Methods 0.000 claims description 30
- 238000012545 processing Methods 0.000 claims description 17
- 230000010354 integration Effects 0.000 claims description 6
- 238000003384 imaging method Methods 0.000 claims description 4
- 238000006243 chemical reaction Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 13
- 238000011156 evaluation Methods 0.000 description 6
- 238000009434 installation Methods 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images














Landscapes
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Image Processing (AREA)
Description
所定の目標物体を含む空港面を撮影して当該空港面の画像信号を出力する撮像手段と、
上記撮影された画像の画像信号から上記目標物体を検出する目標物体検出手段と、
上記目標物体の輪郭データである所定のエッジモデルを用いて上記検出した目標物体を上記空港面において位置合わせを行って、位置合わせ結果の画像信号を出力する位置合わせ手段と、
上記位置合わせ結果の画像信号に基づいて、上記目標物体の上記撮像手段で撮影された画像上の上記空港面との接地点の座標を推定し、上記接地点の座標を地図上の位置座標へ座標変換することで、上記目標物体の上記地図上の位置座標を算出する位置推定手段とを備え、
上記目標物体検出手段は、上記目標物体の背景差分による検出結果と、上記目標物体の追跡による追跡結果とを統合するときに、上記背景差分による検出枠と上記追跡による検出枠の重なりを判定し、重なっていると判定したとき、上記背景差分による検出枠の面積と、上記追跡による検出枠の面積と、上記背景差分による検出枠と上記追跡による検出枠との重なりの面積とに基づいて、所定の重なり率を計算し、上記重なり率に基づいて、上記背景差分による検出結果と上記追跡による検出結果とを統合する統合処理を行うことを特徴とする。
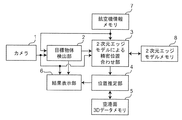
図1はこの発明の実施の形態1に係る空港監視装置の動作を示す概略図である。また、図2は図1の空港監視装置の構成を示すブロック図である。図2において、実施の形態1に係る空港監視装置は、カメラ1と、目標物体検出部2と、2次元エッジモデルによる精密位置合わせ部3と、位置推定部4と、空港面3Dデータメモリ5と、結果表示部6と、航空機情報メモリ7と、2次元エッジモデルメモリ8とを備えて構成される。
を撮影し、このカメラ1から得られる画像の画像信号を用いて、航空機を検出する。そし
て、検出された航空機の領域に対して、予め作成しておいた航空機のエッジモデルを当て
はめる。最後に、航空機が路面上と接地する座標から地図上への位置座標へ変換し、航空
機の推定位置の検出結果を出力する。以下、図2を参照して、実施の形態1に係る空港監
視装置について詳細説明する。

(A)統合枠が1つの場合:背景差分の検出枠と追跡の検出枠の幅を比べ、追跡の検出枠の幅が大きい場合は、追跡の検出枠の幅を採用する。
(B)統合枠が2つ以上の場合:すべての枠を内包する統合枠を算出する。
結果の画像と、空港面3Dデータメモリ5に予め格納された空港面3Dデータを用いて、
位置合わせされた航空機の位置について地図上の座標を算出する。位置推定部4は、2次
元エッジモデルによる精密位置合わせ部3からの位置合わせ結果の画像から、航空機に関
する、画像上の空港面との接地点を推定する。次いで、画像上の空港面での航空機の位置
座標を、空港面3Dデータへの位置座標へ座標変換することで、地図上の位置座標を算出
する。この算出結果を結果表示部6に転送して表示する。結果表示部6は、カメラ1で撮
影した画像に目標物体検出部2で得られた目標物体である航空機の位置の画像と、位置推
定部4で推定した航空機の地図上の位置を地図へ描画する。
実施の形態2.
図8はこの発明の実施の形態2に係る空港監視装置の構成を示すブロック図である。実施の形態2に係る空港監視装置は、図2の実施の形態1に係る空港監視装置に比較して以下の点が異なる。
(1)2次元エッジモデルによる精密位置合わせ部3に代えて、3次元エッジモデルによる精密位置合わせ部3を備えた。
(2)2次元エッジモデルメモリ8に代えて、3次元エッジモデルメモリ8Aを備えた。
以下、相違点について詳述する。
撮影し、このカメラ1から得られる画像の画像信号を用いて、航空機の領域を検出する。
そして、検出された航空機の領域に対して、3次元エッジモデルから2次元エッジモデル
を作成し航空機のエッジモデルを当てはめる。最後に、航空機が空港面の路面上と接地する座標から地図上への位置座標へ変換し、検出結果を出力する。
図10はこの発明の実施の形態3に係る空港監視装置の構成を示すブロック図である。実施の形態3に係る空港監視装置は、図2の実施の形態1に係る空港監視装置に比較して以下の点が異なる。
(1)目標物体検出部2に代えて、点光源検出部2Aを備えた。
(2)2次元エッジモデルによる精密位置合わせ部3に代えて、2次元ライトモデルによる精密位置合わせ部3Bを備えた。
(2)2次元エッジモデルメモリ8に代えて、2次元ライトモデルメモリ8Bを備えた。
以下、相違点について詳述する。
ラ1から得られる画像を用いて、航空機の点光源群を検出する。そして、検出された点光
源群に対して、予め作成しておいた航空機のライトモデルを当てはめる。最後に、航空機
が路面上と接地する座標から地図上への位置座標へ変換し、航空機の位置座標の検出結果
を出力する。
イトモデルに含まれる航空機と路面の接地位置を転送して表示する。
図14はこの発明の実施の形態4に係る空港監視装置の構成を示すブロック図である。実施の形態4に係る空港監視装置は、図3の実施の形態3に係る空港監視装置に比較して以下の点が異なる。
(1)2次元ライトモデルによる精密位置合わせ部3Bに代えて、3次元ライトモデルによる精密位置合わせ部3Cを備えた。
(2)2次元ライトモデルメモリ8Bに代えて、3次元ライトモデルメモリ8Cを備えた。
以下、相違点について詳述する。
ラ1から得られる画像を用いて、航空機の点光源群を検出する。そして、検出された航空
機の点光源群に対して、3次元エッジモデルから2次元エッジモデルを作成し航空機のエ
ッジモデルを当てはめる。最後に、航空機が路面上と接地する座標から地図上への位置座
標へ変換し、航空機の位置の検出結果を出力する。
Claims (5)
- 所定の目標物体を含む空港面を撮影して当該空港面の画像信号を出力する撮像手段と、
上記空港面の画像信号から上記目標物体を検出する目標物体検出手段と、
上記目標物体の輪郭データである所定のエッジモデルを用いて上記検出した目標物体を上記目標物体検出手段で検出した上記目標物体の領域内において位置合わせを行って、位置合わせ結果の画像信号を出力する位置合わせ手段と、
上記位置合わせ結果の画像信号に基づいて、上記目標物体の上記撮像手段で撮影された画像上の上記空港面との接地点の座標を推定し、上記接地点の座標を地図上の位置座標へ座標変換することで、上記目標物体の上記地図上の位置座標を算出する位置推定手段とを備え、
上記目標物体検出手段は、上記目標物体の背景差分による検出結果と、上記目標物体の追跡による追跡結果とを統合するときに、上記背景差分による検出枠と上記追跡による検出枠の重なりを判定し、重なっていると判定したとき、上記背景差分による検出枠の面積と、上記追跡による検出枠の面積と、上記背景差分による検出枠と上記追跡による検出枠との重なりの面積とに基づいて、所定の重なり率を計算し、上記重なり率に基づいて、上記背景差分による検出結果と上記追跡による検出結果とを統合する統合処理を行うことを特徴とする空港監視装置。 - 上記目標物体検出手段は、
(A)上記統合処理で用いる所定の統合枠が1つの場合、上記背景差分による検出枠と、上記追跡による検出枠の幅を比べ、上記追跡による検出枠の幅が大きい場合は、上記追跡による検出枠の幅を採用し、
(B)上記統合枠が2つ以上の場合、すべての統合枠を内包する統合枠を算出することで、上記統合処理を行うことを特徴とする請求項1記載の空港監視装置。 - 上記検出した目標物体の検出結果及び上記推定された目標物体の位置を表示する表示手段をさらに備えることを特徴とする請求項1又は2に記載の空港監視装置。
- 上記エッジモデルは、2次元画像上の目標物体の輪郭データである2次元エッジモデルであることを特徴とする請求項1〜3のうちのいずれか1つに記載の空港監視装置
- 上記エッジモデルは、3次元画像上の目標物体の輪郭データである3次元エッジモデルであることを特徴とする請求項1〜3のうちのいずれか1つに記載の空港監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015012131A JP6593995B2 (ja) | 2015-01-26 | 2015-01-26 | 空港監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015012131A JP6593995B2 (ja) | 2015-01-26 | 2015-01-26 | 空港監視装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016139172A JP2016139172A (ja) | 2016-08-04 |
| JP2016139172A5 JP2016139172A5 (ja) | 2018-02-22 |
| JP6593995B2 true JP6593995B2 (ja) | 2019-10-23 |
Family
ID=56559193
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015012131A Active JP6593995B2 (ja) | 2015-01-26 | 2015-01-26 | 空港監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6593995B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6934386B2 (ja) * | 2017-10-03 | 2021-09-15 | 日本放送協会 | 動体追尾装置及びそのプログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0966900A (ja) * | 1995-09-01 | 1997-03-11 | Hitachi Ltd | 飛行状態監視方法とその装置 |
| JP3226812B2 (ja) * | 1996-12-12 | 2001-11-05 | 独立行政法人電子航法研究所 | 空港面監視装置 |
| JP3547946B2 (ja) * | 1997-08-05 | 2004-07-28 | 三菱電機株式会社 | エプロン監視装置 |
| JP2004094518A (ja) * | 2002-08-30 | 2004-03-25 | Oki Electric Ind Co Ltd | 人物追跡装置、人物追跡方法及びプログラム |
| JP2005055184A (ja) * | 2003-08-01 | 2005-03-03 | Toshiba Corp | 地上走行管制表示システムおよび地上走行管制表示方法 |
| JP5773944B2 (ja) * | 2012-05-22 | 2015-09-02 | 株式会社ソニー・コンピュータエンタテインメント | 情報処理装置および情報処理方法 |
-
2015
- 2015-01-26 JP JP2015012131A patent/JP6593995B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016139172A (ja) | 2016-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI695181B (zh) | 用於產生彩色點雲的方法和系統 | |
| JP6760114B2 (ja) | 情報処理装置、データ管理装置、データ管理システム、方法、及びプログラム | |
| JP5588812B2 (ja) | 画像処理装置及びそれを用いた撮像装置 | |
| JP4406381B2 (ja) | 障害物検出装置及び方法 | |
| KR102054455B1 (ko) | 이종 센서 간의 캘리브레이션 장치 및 방법 | |
| CN107305632B (zh) | 基于单目计算机视觉技术的目标对象距离测量方法与系统 | |
| Chien et al. | Visual odometry driven online calibration for monocular lidar-camera systems | |
| CN111164648B (zh) | 移动体的位置推断装置及位置推断方法 | |
| EP3159122A1 (en) | Device and method for recognizing location of mobile robot by means of search-based correlation matching | |
| WO2020140164A1 (en) | Systems and methods for updating a high-definition map | |
| CN108645375B (zh) | 一种用于车载双目系统快速车辆测距优化方法 | |
| JP6552448B2 (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラム | |
| CN111623773B (zh) | 一种基于鱼眼视觉和惯性测量的目标定位方法及装置 | |
| US20140286537A1 (en) | Measurement device, measurement method, and computer program product | |
| JP6410231B2 (ja) | 位置合わせ装置、位置合わせ方法及び位置合わせ用コンピュータプログラム | |
| EP3051255B1 (en) | Survey data processing device, survey data processing method, and program therefor | |
| JP2021081272A (ja) | 位置推定装置および位置推定用コンピュータプログラム | |
| WO2020113425A1 (en) | Systems and methods for constructing high-definition map | |
| US20200132471A1 (en) | Position Estimating Device | |
| KR102195040B1 (ko) | 이동식 도면화 시스템 및 모노카메라를 이용한 도로 표지 정보 수집 방법 | |
| JP6886136B2 (ja) | 位置合わせ装置、位置合わせ方法及び位置合わせ用コンピュータプログラム | |
| KR20160125803A (ko) | 영역 추출 장치, 물체 탐지 장치 및 영역 추출 방법 | |
| JP6593995B2 (ja) | 空港監視装置 | |
| JP2020076714A (ja) | 位置姿勢推定装置 | |
| JP2018116147A (ja) | 地図作成装置、地図作成方法及び地図作成用コンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190312 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190924 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6593995 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |