JP6580475B2 - ワイヤレス給電システム - Google Patents
ワイヤレス給電システム Download PDFInfo
- Publication number
- JP6580475B2 JP6580475B2 JP2015238315A JP2015238315A JP6580475B2 JP 6580475 B2 JP6580475 B2 JP 6580475B2 JP 2015238315 A JP2015238315 A JP 2015238315A JP 2015238315 A JP2015238315 A JP 2015238315A JP 6580475 B2 JP6580475 B2 JP 6580475B2
- Authority
- JP
- Japan
- Prior art keywords
- coil
- power
- permanent magnet
- receiving device
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Description
第1の永久磁石を有し、建物の躯体の一方側に配置されて電力を供給する給電装置と、
第2の永久磁石を有し、前記躯体の他方側に配置されて前記第1の永久磁石と前記第2の永久磁石との間の磁気吸引力により前記給電装置に引き寄せられ、前記給電装置から電力をワイヤレスで受電する受電装置と、を備え、
前記給電装置は、
前記第1の永久磁石と前記第2の永久磁石との間に磁界を発生させる第1のコイルと、
前記受電装置を移動させるときに、前記第1の永久磁石と前記第2の永久磁石との間の磁界を弱める磁界が前記第1のコイルに発生するように、前記第1のコイルに電圧を印加する電源と、
を有することを特徴とする。
図1(a)は、第1の実施形態に係るワイヤレス給電システム100の概略的な構成を示す縦断面図である。図1(b)は、図1(a)の第1の永久磁石12と第1のコイル14の上面図である。図1(a)に示すように、ワイヤレス給電システム100は、給電装置10と、受電装置20と、を備える。ワイヤレス給電システム100には、照明などの負荷40が接続可能である。
第1の永久磁石12のN極とS極とを逆向きに配置して、第2の永久磁石22のN極とS極とを逆向きに配置してもよい。
給電モードは、ワイヤレス給電を行うためのモードである。電源16は、給電モードにおいて、第1のコイル14に交流電圧を印加する。これにより、第1のコイル14に発生する磁界が変動し、電磁誘導によって第2のコイル24に起電力が発生し、第1のコイル14から第2のコイル24にワイヤレスで電力が供給される。交流電圧の振幅と周波数は、所望の電力が伝送できるように設定すればよい。電磁誘導方式に替えて磁界共鳴方式を用いて給電してもよい。
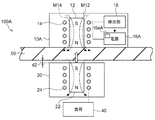
図2は、図1のワイヤレス給電システム100の移動モードを説明する図である。移動モードは、給電装置10および受電装置20を移動させるためのモードである。
電源16は、移動モードにおいて、第1の永久磁石12と第2の永久磁石22との間の磁界を弱める磁界が第1のコイル14に発生するように、第1のコイル14に直流電圧を印加する。従って、ワイヤレス給電は停止される。具体的には、電源16は、第1の永久磁石12による磁界の方向と逆方向の磁界を第1のコイル14に発生させる。即ち、第1のコイル14による磁束線M14の方向は、第1の永久磁石12による磁束線M12の方向と逆方向である。
また、交流電圧を印加することにより、移動モードにおいても受電装置20に電力を供給し続けることもできる。
図3は、図1のワイヤレス給電システム100の取り外しモードを説明する図である。取り外しモードは、受電装置20を躯体50から取り外すためのモードである。
電源16は、取り外しモードにおいて、第1の永久磁石12と第2の永久磁石22との間の磁界が、上述した移動モードの磁界より弱くなるように、第1のコイル14に直流電圧を印加する。即ち、電源16は、移動モードの直流電圧よりも高い直流電圧を第1のコイル14に印加する。これにより、給電装置10と受電装置20との間の磁気吸引力を移動モードよりも弱くすることができる。従って、ユーザは、受電装置20を容易に取り外すことができる。
図4は、図1のワイヤレス給電システム100の固定モードを説明する図である。固定モードは、受電装置20を躯体50により強く固定するためのモードである。
電源16は、固定モードにおいて、第1の永久磁石12と第2の永久磁石22との間の磁界を強める磁界が第1のコイル14に発生するように、第1のコイル14に直流電圧を印加する。具体的には、電源16は、移動モード及び取り外しモードの直流電圧とは逆極性の直流電圧を第1のコイル14に印加し、第1の永久磁石12による磁界の方向と同方向の磁界を第1のコイル14に発生させる。即ち、第1のコイル14による磁束線M14の方向は、第1の永久磁石12による磁束線M12の方向と同方向である。これにより、給電装置10と受電装置20との間の磁気吸引力を、第1の永久磁石12と第2の永久磁石22のみを用いる場合よりも強くすることができる。従って、より確実に受電装置20の落下を抑制できる。固定モードは、より重い負荷40を用いる場合などに好適である。
第2の実施形態では、受電装置20が躯体50から離れたことが検出された場合に、磁気吸引力を強くする。以下では、第1の実施形態との相違点を中心に説明する。
図示は省略するが、第1のコイル14は、第1の永久磁石12に巻回されず、第1の永久磁石12に隣り合う位置に配置され、第2のコイル24は、第2の永久磁石22に巻回されず、第2の永久磁石22に隣り合う位置に配置されてもよい。第1のコイル14は、第1の永久磁石12と第2の永久磁石22との間に磁界を発生させる位置に配置される。第1のコイル14と第2のコイル24は、それらの中心軸同士がほぼ一致する位置に配置される。第1のコイル14に交流電圧を印加することにより、第1のコイル14から第2のコイル24にワイヤレス給電される。
また、第1の実施形態または第2の実施形態の効果も得られる。ただし、第1の変形例では、第1のコイル14および第2のコイル24を配置するスペースの分だけ、給電装置10および受電装置20は第1の実施形態または第2の実施形態よりも大きくなる。
図示は省略するが、給電装置10は、第1のコイル14に加えて給電用コイルを有し、受電装置20は、第2のコイル24を有さず、受電用コイルを有してもよい。給電用コイルと受電用コイルは、専らワイヤレス給電に用いられる。そのため、給電用コイルと受電用コイルは、第1の永久磁石12と第2の永久磁石22との間の磁界に影響を与えない位置に設けられても良い。第1のコイル14は、第1の実施形態のように第1の永久磁石12に巻回されてもよく、第1の変形例のように第1の永久磁石12に隣り合う位置に配置されてもよい。
また、第1の実施形態または第2の実施形態の効果も得られる。ただし、第2の変形例では、少なくとも給電用コイルおよび受電用コイルを配置するスペースの分だけ、給電装置10および受電装置20は第1の実施形態または第2の実施形態よりも大きくなる。
前記給電装置は、前記受電装置が前記躯体から離れたことを表す物理量を検出する検出部を有し、
前記電源は、検出された前記物理量に基づいて、前記受電装置が前記躯体から離れた場合に、前記第1の永久磁石と前記第2の永久磁石との間の磁界を強める磁界が前記第1のコイルに発生するように、前記第1のコイルに電圧を印加してもよい。
この態様によれば、受電装置が躯体から離れた場合に磁気吸引力を強くできるので、移動中に受電装置が誤って落下することを抑制できる。
この態様によれば、簡単な構成で受電装置が躯体から離れたことを検出できる。
前記第1のコイルは、前記第1の永久磁石の周囲に巻回され、
前記受電装置は、前記第2の永久磁石の周囲に巻回された第2のコイルを有し、
前記電源は、前記第1のコイルに交流電圧を印加し、これにより前記第1のコイルから前記第2のコイルに電力が供給されてもよい。
この態様によれば、第1のコイルによって磁気吸引力の調整および電力供給の両方を行うことができるので、ワイヤレス給電システムの構成を簡略化できる。
この態様によれば、ワイヤレス給電システムの設計の自由度を向上できる。
Claims (11)
- 第1の永久磁石を有し、建物の躯体の一方側に配置されて電力を供給する給電装置と、
第2の永久磁石を有し、前記躯体の他方側に配置されて前記第1の永久磁石と前記第2の永久磁石との間の磁気吸引力により前記給電装置に引き寄せられ、前記給電装置から電力をワイヤレスで受電する受電装置と、を備えるワイヤレス給電システムであって、
前記給電装置は、
前記第1の永久磁石と前記第2の永久磁石との間に磁界を発生させる第1のコイルと、
前記第1のコイルに電圧を印加して前記第1の永久磁石と前記第2の永久磁石との磁気吸引力を調整する電源と、を有しており、
前記給電装置は、少なくとも給電モード、移動モード、取り外しモードの何れかに切り替え可能に構成され、
前記移動モードまたは前記取り外しモードにおいて、前記電源が前記第1のコイルに前記電圧を印加して前記第1の永久磁石と前記第2の永久磁石との間の磁気吸引力を弱める、
ことを特徴とするワイヤレス給電システム。 - 前記移動モードにおいて、前記電源が前記第1のコイルに直流電圧を印加することにより、前記受電装置と前記建物の躯体との間に視認できない程度の微小な隙間が形成され、静止摩擦力が働く状態から動摩擦力が働く状態に変化し、前記受電装置が落下しない程度に前記磁気吸引力を保持しつつ前記躯体上で前記受電装置を移動させる請求項1に記載のワイヤレス給電システム。
- 前記取り外しモードにおいて、前記移動モードにおいて印加した電圧よりも大きな直流電圧を前記電源が前記第1のコイルに印加することにより、前記給電装置と前記受電装置との間の磁気吸引力が前記移動モードよりも弱くなり前記受電装置の取り外しが可能となる請求項2に記載のワイヤレス給電システム。
- 前記移動モードまたは前記取り外しモードにおいて、前記第1のコイルに印加する電圧を交流電圧とする請求項2または3に記載のワイヤレス給電システム。
- 前記受電装置を前記躯体に対してより強く固定する固定モードを更に備え、
前記固定モードにおいて、前記移動モード及び前記取り外しモードの直流電圧とは逆極性の直流電圧を前記第1のコイルに印加し、前記第1の永久磁石による磁界の方向と同方向の磁界を前記第1のコイルに発生させて、前記給電装置と前記受電装置との間の磁気吸引力を強める請求項1から3いずれかに記載のワイヤレス給電システム。 - 前記給電モードにおいて、前記電源が前記第1のコイルに交流電圧を印加し磁界を変動させることにより電磁誘導または磁界共鳴により前記受電装置の第2のコイルに起電力を発生させる請求項1から5いずれかに記載のワイヤレス給電システム。
- 前記給電モードにおいて、前記電源が前記第1のコイルに交流電圧を印加し磁界を変動させることにより電磁誘導または磁界共鳴により前記受電装置の第2のコイルに起電力を発生させ、
前記給電モードにおいて、前記電源が、前記交流電圧に加えて前記固定モードの直流電圧を前記第1のコイルに印加する請求項5に記載のワイヤレス給電システム。 - 前記給電装置は、前記受電装置が前記躯体から離れたことを表す物理量を検出する検出部を有し、
前記移動モードにおいて、前記電源は、検出された前記物理量に基づいて、前記受電装置が前記躯体から離れた場合に、前記第1の永久磁石と前記第2の永久磁石との間の磁界を強める磁界が前記第1のコイルに発生するように、前記第1のコイルに電圧を印加する、ことを特徴とする請求項1から7のいずれかに記載のワイヤレス給電システム。 - 前記検出部は、前記物理量として前記第1のコイルの電流または電圧を検出する、ことを特徴とする請求項8に記載のワイヤレス給電システム。
- 前記第1のコイルは、前記第1の永久磁石の周囲に巻回され、
前記受電装置は、前記第2の永久磁石の周囲に巻回された第2のコイルを有し、
前記給電モードにおいて、前記電源は、前記第1のコイルに交流電圧を印加し、これにより前記第1のコイルから前記第2のコイルに電力が供給される、ことを特徴とする請求項1から9のいずれかに記載のワイヤレス給電システム。 - 前記給電装置に替えて前記受電装置が前記第1のコイルと前記電源とを有する、ことを特徴とする請求項1に記載のワイヤレス給電システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238315A JP6580475B2 (ja) | 2015-12-07 | 2015-12-07 | ワイヤレス給電システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015238315A JP6580475B2 (ja) | 2015-12-07 | 2015-12-07 | ワイヤレス給電システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017108480A JP2017108480A (ja) | 2017-06-15 |
| JP6580475B2 true JP6580475B2 (ja) | 2019-09-25 |
Family
ID=59060923
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015238315A Expired - Fee Related JP6580475B2 (ja) | 2015-12-07 | 2015-12-07 | ワイヤレス給電システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6580475B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7122137B2 (ja) * | 2018-03-29 | 2022-08-19 | 株式会社Lixil | ワイヤレス給電用電気ユニット |
| CN110571952B (zh) * | 2019-08-30 | 2021-09-14 | 维沃移动通信有限公司 | 一种无线充电方法及相关设备 |
| CN110535204B (zh) * | 2019-08-30 | 2022-01-04 | 维沃移动通信有限公司 | 一种无线充电方法及相关设备 |
| CN110571951B (zh) * | 2019-08-30 | 2022-01-04 | 维沃移动通信有限公司 | 一种无线充电方法及相关设备 |
| WO2023003366A1 (ko) * | 2021-07-20 | 2023-01-26 | 엘지전자 주식회사 | 영구 자석을 포함하는 멀티 코일 무선 충전 시스템 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4882841B2 (ja) * | 2007-04-09 | 2012-02-22 | ソニー株式会社 | 通信装置および通信方法、並びにプログラム |
| JP4841534B2 (ja) * | 2007-11-20 | 2011-12-21 | 三菱電機株式会社 | 電子機器 |
| JP2009159683A (ja) * | 2007-12-25 | 2009-07-16 | Panasonic Electric Works Co Ltd | 非接触給電機能付き建造物、および非接触給電アウトレット |
| KR101581058B1 (ko) * | 2008-02-22 | 2015-12-29 | 액세스 비지니스 그룹 인터내셔날 엘엘씨 | 유도성 커플링을 위한 자기 위치 설정 시스템 |
| JP2012095456A (ja) * | 2010-10-27 | 2012-05-17 | Sanyo Electric Co Ltd | 非接触電力伝送システム、一次側機器及び二次側機器 |
| JP2015081029A (ja) * | 2013-10-23 | 2015-04-27 | アイシン精機株式会社 | 車両用給電装置 |
-
2015
- 2015-12-07 JP JP2015238315A patent/JP6580475B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017108480A (ja) | 2017-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6580475B2 (ja) | ワイヤレス給電システム | |
| KR101823228B1 (ko) | 자기흐름 제어장치 | |
| IN2014DN10811A (ja) | ||
| KR20180037585A (ko) | 전자영구 자석을 포함하는 햅틱 액츄에이터 | |
| CN111405437B (zh) | 扬声器装置 | |
| JP2010287455A (ja) | 電磁継電器 | |
| KR101193468B1 (ko) | 소음방지형 변속 솔레노이드장치 | |
| RU2016141407A (ru) | Микроволновая печь и способ управления ею | |
| CN106792324B (zh) | 磁吸式耳机装置以及电子设备 | |
| EP2696248A3 (en) | Power control apparatus and image forming apparatus | |
| US20190011711A1 (en) | Wearable device | |
| EP3547511A1 (en) | Electric power generating element, and smart key | |
| JP6167877B2 (ja) | 非接触給電システム | |
| CN105723492A (zh) | 用于控制接触器的方法和控制单元 | |
| IN2014DE00965A (ja) | ||
| CN104768343A (zh) | 电磁机构及电子设备 | |
| KR20170107344A (ko) | 무선 전력 송신 장치 및 그의 제어 방법 | |
| KR100994869B1 (ko) | 대기전력 차단용 콘센트 | |
| JP2012200293A (ja) | 電動カーテン | |
| CN105978132A (zh) | 一种应急电源机柜防尘与散热相互切换装置 | |
| JP2010273473A (ja) | 電力供給装置 | |
| CN102957359B (zh) | 磁悬浮支撑结构 | |
| JP2007206776A (ja) | 非接触電力伝送装置 | |
| JP2008300629A (ja) | ソレノイド装置及びその駆動方法 | |
| KR101578161B1 (ko) | 진동 액추에이터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180831 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190801 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190828 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6580475 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |