JP6571495B2 - 磁気共鳴イメージング装置及び画像生成方法 - Google Patents
磁気共鳴イメージング装置及び画像生成方法 Download PDFInfo
- Publication number
- JP6571495B2 JP6571495B2 JP2015218826A JP2015218826A JP6571495B2 JP 6571495 B2 JP6571495 B2 JP 6571495B2 JP 2015218826 A JP2015218826 A JP 2015218826A JP 2015218826 A JP2015218826 A JP 2015218826A JP 6571495 B2 JP6571495 B2 JP 6571495B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- sampling density
- magnetic resonance
- space
- range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4818—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/50—NMR imaging systems based on the determination of relaxation times, e.g. T1 measurement by IR sequences; T2 measurement by multiple-echo sequences
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/5608—Data processing and visualization specially adapted for MR, e.g. for feature analysis and pattern recognition on the basis of measured MR data, segmentation of measured MR data, edge contour detection on the basis of measured MR data, for enhancing measured MR data in terms of signal-to-noise ratio by means of noise filtering or apodization, for enhancing measured MR data in terms of resolution by means for deblurring, windowing, zero filling, or generation of gray-scaled images, colour-coded images or images displaying vectors instead of pixels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/561—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reduction of the scanning time, i.e. fast acquiring systems, e.g. using echo-planar pulse sequences
- G01R33/5611—Parallel magnetic resonance imaging, e.g. sensitivity encoding [SENSE], simultaneous acquisition of spatial harmonics [SMASH], unaliasing by Fourier encoding of the overlaps using the temporal dimension [UNFOLD], k-t-broad-use linear acquisition speed-up technique [k-t-BLAST], k-t-SENSE
Landscapes
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Description
図1は、第1の実施形態に係るMRI装置100を示すブロック図である。図1に示すように、MRI装置100は、静磁場磁石101と、傾斜磁場コイル102と、傾斜磁場電源103と、寝台104と、寝台制御回路105と、送信コイル106と、送信回路107と、受信コイルアレイ108と、受信回路109と、シーケンス制御回路110と、計算機システム120とを備える。なお、MRI装置100に被検体P(例えば、人体)は含まれない。
まず、T1マッピング画像について説明する。被検体PにRFパルスを与えていない状態では、被検体Pの撮像対象の領域(対象領域)における磁化ベクトルの向きは静磁場の方向であるZ方向となる。ここで、磁化ベクトルの強さ(大きさ)をM0とする。被検体Pがラーモア周波数に対応したRFパルスを受けると、被検体Pの対象領域のZ方向(縦方向)の磁化ベクトルの強さはM0よりも弱い値になり、その後、徐々にM0まで回復していく。RFパルスを受けた直後の時刻をt=0で表し、t=0におけるZ方向の磁化ベクトルの強さをM1で表すと、Z方向の磁化ベクトルの強さM(t)は、以下の式(1)で表される。
M(t)=M0+(M1−M0)exp(−t/T1) (1)
次に、T2マッピング画像について説明する。被検体Pがラーモア周波数に対応したRFパルスを受けた直後は、磁化ベクトルのXY平面の成分は乱雑さが最も少ない状態になる。その後、磁化ベクトルのXY平面の成分は徐々に減衰していく。磁場の不均一性に影響されない減衰の時定数をT2値と呼び、磁場の不均一性の影響も含めた減衰の時定数をT2*値と呼ぶ。これらの減衰の時定数は、複数のエコー時間(TE)に対応した複数の画像を撮像し、撮像した複数の画像の違いを利用することで画像に反映させることができる。具体的には、例えば、T2マッピングでは、XY平面での磁化ベクトルの強さM(t)が初期時刻での磁化ベクトルの強さM0に対し、以下の式(2)で示すように減衰することを利用し、複数のTEに対するT2値を推定し、推定したT2値を画像に反映させることで、T2マッピング画像を生成する。
M(t)=M0exp(−TE/T2) (2)
次に、T1ρマッピング画像について説明する。例えば、MRI装置の磁場強度として1〜7T程度を考えると、T1緩和は数十〜数百MHzのラーモア周波数で起こる分子の動きに対応する。一方、数kHzといった低周波数で起こる分子の動きには、磁化移動や化学交換といった分子構造や組成による動きが含まれるため、このような低周波数での緩和を計測する方法としてT1ρパルスシーケンスがある。T1ρパルスシーケンスでは、Z方向の磁化ベクトルの強さM0に対し専用のプリパルスを加えT1ρに依存した強さで減衰させてから、任意のパルスシーケンスで撮像するパルスシーケンスである。専用のプリパルスは、Z方向の磁化ベクトルをXY方向に倒してから、ラーモア周波数とは別の低周波数に対応したパルスであるスピンロックパルスをTSL時間だけ照射し続けた後、磁化ベクトルをZ方向に戻すというものである。このプリパルスにより、収集信号の強さSは、TSLがない場合の信号の強さをS0とし、またスピンロックパルスの強度を変えないものとすれば、以下の式(3)で表される。
S(TSL)=S0exp(−TSL/T1ρ) (3)
任意のパルスシーケンスの前に拡散強調用プリパルスを加えて拡散に依存した信号減衰を発生させてから、任意のパルスシーケンスで収集を行うことで、分子の拡散(Diffusion)を画像に反映させることができる。パルスシーケンスで用いる撮像パラメータをまとめた値をb値と呼ぶ。プリパルスを適用しない場合の信号の強さをS0、プリパルスを適用した場合の信号の強さをS(b)、分子の拡散係数をADCで表すと、理想的には、以下の式(4)で表される。
S(b)=S0exp(−b・ADC) (4)
上述したように、パラメータマッピング技術とは、注目する撮像パラメータを段階的に変化させ、その信号減衰の程度から何らかのパラメータを推定し、推定したパラメータを画像に反映させる技術と考えられる。以下の説明では、撮像パラメータのうち段階的に変化させる撮像パラメータを注目撮像パラメータと呼ぶ。また、注目撮像パラメータの軸をp軸と呼ぶ。以下の説明では特に断らない限り、p軸が1次元の場合の例について説明するが、2次元以上でもあっても良く、この場合には、各次元について、以下で述べる方法をそのまま適用すればよい。
図7を参照して、上述したパラメータマッピングのための収集を行う処理の流れの一例について説明する。図7は、実施形態に係るパラメータマッピングのための収集を行う処理の流れの一例を示すフローチャートである。
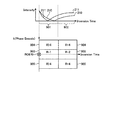
図8は、実施形態に係るサンプリング密度制御の一例を示す図である。図8は、Look−Locker法をベースとしたT1マッピングにおける、TIに対するサンプリング密度の制御方法の一例を示す。なお、図8の例では、アンダーサンプリングされたk空間データのフルサンプリングに対するサンプル数の割合「Reduction Factor」を「R」で表している。以下の説明においても、「Reduction Factor」を「R」で表すこととする。また、図8の例では、フェーズエンコード(Phase Encode)の軸に加え、リードアウト(RO(readout))970の軸が示されている。リードアウト970の軸は、フェーズエンコードの軸に直交する。
本実施形態では、画像生成機能123bによる画像生成方法は、特に限定されない。以下、画像生成方法の一例として、p軸方向のビューシェアリング法、および、k−p法の2種類の手法について説明する。
ビューシェアリング法とは、時系列データを撮像する際に、ある時刻でサンプリングしなかった点のサンプル値を、その点をサンプリングした別の時刻のサンプル値を利用して推定する手法である。本実施形態では、p軸を時間軸のように扱うことでこのビューシェアリング法を利用する。
アンダーサンプリング状態の時系列データを直接再構成する方法はk−t法と総称され、様々なk−t法が知られている。本実施形態に係る画像生成機能123bは、p軸を時間軸のように扱うことで、このk−t法を利用して再構成画像を生成することができる。p軸を時間軸のように扱うことから、便宜上、この方法をk−p法と呼ぶことにする。
なお、上述した実施形態では、MRI装置100が、注目撮像パラメータの値を2つの範囲に分けて、各範囲に対応するサンプリング密度制御を行う場合について説明した。しかしながら、MRI装置100は、注目撮像パラメータの値を3つ以上の範囲に分けて、各範囲に対応するサンプリング密度制御を行ってもよい。そこで、このような変形例を実施形態に係る変形例として説明する。以下、図11を参照して、MRI装置100が、注目撮像パラメータの値を3つの範囲に分けて、各範囲に対応するサンプリング密度制御を行う例について説明する。
上述した実施形態の中で示した処理手順に示された指示は、ソフトウェアであるプログラム(画像生成プログラムとも称される)に基づいて実行されることが可能である。汎用の計算機システムが、この画像生成プログラムを予め記憶しておき、この画像生成プログラムを読み込むことにより、上述した実施形態のMRI装置による効果と同様な効果を得ることも可能である。上述した実施形態で記述された指示は、コンピュータに実行させることのできる画像生成プログラムとして、磁気ディスク(フレキシブルディスク、ハードディスクなど)、光ディスク(CD−ROM、CD−R、CD−RW、DVD−ROM、DVD±R、DVD±RWなど)、半導体メモリ、又はこれに類する記録媒体に記録される。コンピュータ又は組み込みシステムが読み取り可能な記憶媒体であれば、その記憶形式は何れの形態であってもよい。コンピュータは、この記録媒体から画像生成プログラムを読み込み、この画像生成プログラムに基づいて画像生成プログラムに記述されている指示をCPUで実行させれば、上述した実施形態のMRI装置と同様な動作を実現することができる。もちろん、コンピュータが画像生成プログラムを取得する場合又は読み込む場合はネットワークを通じて取得又は読み込んでもよい。
110 シーケンス制御回路
123a 配置機能
123b 画像生成機能
Claims (9)
- パルスシーケンスの実行を制御することによって、k空間に配置される磁気共鳴信号を、撮像パラメータが第1の範囲に含まれる場合には、k空間の中心を含む第1領域を第1のサンプリング密度で収集するとともに、前記第1領域とは異なる第2領域を前記第1のサンプリング密度とは異なる第2のサンプリング密度で収集し、前記撮像パラメータが、前記第1の範囲とは異なる第2の範囲に含まれる場合には、前記第1領域を前記第1のサンプリング密度よりも低いサンプリング密度で収集するとともに、前記第2領域を前記第2のサンプリング密度よりも高いサンプリング密度で収集するシーケンス制御部と、
前記磁気共鳴信号を撮像パラメータ軸上の各点に対するk空間データとしてk空間に配置する配置部と、
前記k空間データに基づいて、画像を生成する画像生成部と、
を備える、磁気共鳴イメージング装置。 - 前記撮像パラメータは、TI(Inversion Time)であり、
前記シーケンス制御部は、90度よりも大きいRF(Radio Frequency)パルスを照射するためのパルス制御を含む前記パルスシーケンスの実行を制御することによって前記磁気共鳴信号を収集し、
前記画像生成部は、前記k空間データに基づいて、T1マッピング画像を生成する、請求項1に記載の磁気共鳴イメージング装置。 - 前記撮像パラメータは、TE(Echo Time)であり、
前記シーケンス制御部は、マルチエコー収集を行うためのパルス制御を含む前記パルスシーケンスの実行を制御することによって前記磁気共鳴信号を収集し、
前記画像生成部は、前記k空間データに基づいて、T2マッピング画像を生成する、請求項1に記載の磁気共鳴イメージング装置。 - 前記撮像パラメータは、TSL(Spin Lock Time)であり、
前記シーケンス制御部は、スピンロックパルスを照射するためのパルス制御を含む前記パルスシーケンスの実行を制御することによって前記磁気共鳴信号を収集し、
前記画像生成部は、前記k空間データに基づいて、T1ρマッピング画像を生成する、請求項1に記載の磁気共鳴イメージング装置。 - 前記第1の範囲は、対応する画素値の変化の度合いが所定値以上となる範囲であり、前記第2の範囲は、対応する画素値の変化の度合いが所定値未満となる範囲である、請求項1〜4の何れか1つに記載の磁気共鳴イメージング装置。
- 前記画像生成部は、前記第1領域及び第2領域の少なくとも1つの領域内で、k空間データとして収集されていない位置のk空間データを、当該位置に対応する値の撮像パラメータとは異なる値の撮像パラメータにおける前記位置と同一の位置のk空間データを利用して生成する、請求項1〜5の何れか1つに記載の磁気共鳴イメージング装置。
- 前記画像生成部は、前記第1領域及び第2領域の少なくとも1つの領域内で、k空間データとして収集されていない位置のk空間データを、当該位置から所定の範囲内の位置のk空間データを利用して生成する、請求項1〜5の何れか1つに記載の磁気共鳴イメージング装置。
- 前記シーケンス制御部は、前記磁気共鳴信号を、前記第1領域を前記第1のサンプリング密度で収集し、前記第2領域を前記第2のサンプリング密度で収集した後に、前記第1領域を前記第1のサンプリング密度よりも低いサンプリング密度で収集し、前記第2領域を前記第2のサンプリング密度よりも高いサンプリング密度で収集する、請求項1〜7の何れか1つに記載の磁気共鳴イメージング装置。
- パルスシーケンスの実行を制御することによって、k空間に配置される磁気共鳴信号を、撮像パラメータが第1の範囲に含まれる場合には、k空間の中心を含む第1領域を第1のサンプリング密度で収集するとともに、前記第1領域とは異なる第2領域を前記第1のサンプリング密度とは異なる第2のサンプリング密度で収集し、前記撮像パラメータが、前記第1の範囲とは異なる第2の範囲に含まれる場合には、前記第1領域を前記第1のサンプリング密度よりも低いサンプリング密度で収集するとともに、前記第2領域を前記第2のサンプリング密度よりも高いサンプリング密度で収集するシーケンス制御ステップと、
前記磁気共鳴信号を撮像パラメータ軸上の各点に対するk空間データとしてk空間に配置する配置ステップと、
前記k空間データに基づいて、画像を生成する画像生成ステップと、
を含む、画像生成方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015218826A JP6571495B2 (ja) | 2015-11-06 | 2015-11-06 | 磁気共鳴イメージング装置及び画像生成方法 |
| US15/342,576 US10481231B2 (en) | 2015-11-06 | 2016-11-03 | Magnetic resonance imaging apparatus and image generation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015218826A JP6571495B2 (ja) | 2015-11-06 | 2015-11-06 | 磁気共鳴イメージング装置及び画像生成方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017086337A JP2017086337A (ja) | 2017-05-25 |
| JP6571495B2 true JP6571495B2 (ja) | 2019-09-04 |
Family
ID=58663308
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015218826A Active JP6571495B2 (ja) | 2015-11-06 | 2015-11-06 | 磁気共鳴イメージング装置及び画像生成方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10481231B2 (ja) |
| JP (1) | JP6571495B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6710127B2 (ja) * | 2016-08-22 | 2020-06-17 | 株式会社日立製作所 | 磁気共鳴イメージング装置および画像再構成方法 |
| US10989779B2 (en) | 2017-09-29 | 2021-04-27 | Yonsei University, University - Industry Foundation (UIF) | Apparatus and method for reconstructing magnetic resonance image using learning, and under-sampling apparatus method and recording medium thereof |
| JP6782681B2 (ja) * | 2017-11-06 | 2020-11-11 | 株式会社日立製作所 | 磁気共鳴イメージング装置、撮像パラメータセット生成用演算装置及び撮像パラメータセット生成プログラム |
| EP3686621A1 (en) | 2019-01-23 | 2020-07-29 | Siemens Healthcare GmbH | Imaging method with variable density in k-space for multi-spin echo magnetic resonance imaging with different delay times after a preparation pulse and/or different echo times |
| US10705170B1 (en) * | 2019-02-15 | 2020-07-07 | GE Precision Healthcare LLC | Methods and systems for removing spike noise in magnetic resonance imaging |
| JP7334256B2 (ja) * | 2019-09-27 | 2023-08-28 | 富士フイルム株式会社 | 画像処理装置、方法およびプログラム、学習装置、方法およびプログラム、並びに導出モデル |
| CN117407477B (zh) * | 2023-10-26 | 2024-05-14 | 航科院中宇(北京)新技术发展有限公司 | 地理信息数据演变识别处理方法、系统及存储介质 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7439737B2 (en) * | 2004-05-14 | 2008-10-21 | Koninklijke Philips Electronics N.V. | Contrast prepared MRI involving non-cartesian trajectories with oversampling of the center of k-space |
| US8587307B2 (en) * | 2009-07-09 | 2013-11-19 | Uwm Research Foundation, Inc. | Systems and methods for accelerating the acquisition and reconstruction of magnetic resonance images with randomly undersampled and uniformly undersampled data |
| US9002430B2 (en) * | 2010-01-04 | 2015-04-07 | Mayo Foundation For Medical Education And Research | System and method for combined time-resolved magnetic resonance angiography and perfusion imaging |
| CN103328999A (zh) * | 2011-01-25 | 2013-09-25 | 皇家飞利浦有限公司 | 交错的自旋锁定成像 |
| EP2827763A1 (en) * | 2012-03-21 | 2015-01-28 | Koninklijke Philips N.V. | System and method for differentiation of normal myocardium from diffuse disease using t1 mapping in non-ischemic cardiomyopathies and others |
| EP2743718A1 (en) * | 2012-12-11 | 2014-06-18 | Samsung Electronics Co., Ltd | Respiratory-gated MRI |
| CN105051564A (zh) * | 2013-03-22 | 2015-11-11 | 皇家飞利浦有限公司 | 用于压缩感测MRI中的经改进的k-空间采样的方法 |
| WO2015019970A1 (ja) * | 2013-08-08 | 2015-02-12 | 株式会社東芝 | 画像処理装置及び磁気共鳴イメージング装置 |
| KR101857795B1 (ko) * | 2013-12-18 | 2018-05-14 | 삼성전자주식회사 | 자기 공명 영상 장치 및 그 동작방법 |
| US20150346305A1 (en) * | 2014-05-28 | 2015-12-03 | General Electric Company | System and method for generating a magnetic resonance image |
-
2015
- 2015-11-06 JP JP2015218826A patent/JP6571495B2/ja active Active
-
2016
- 2016-11-03 US US15/342,576 patent/US10481231B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170131373A1 (en) | 2017-05-11 |
| JP2017086337A (ja) | 2017-05-25 |
| US10481231B2 (en) | 2019-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6571495B2 (ja) | 磁気共鳴イメージング装置及び画像生成方法 | |
| CN109658471B (zh) | 一种医学图像重建方法和系统 | |
| US20170003363A1 (en) | System and method for free radical imaging | |
| US20180231626A1 (en) | Systems and methods for magnetic resonance fingerprinting for quantitative breast imaging | |
| US8049497B2 (en) | MRI RF encoding using multiple transmit coils | |
| US9841483B2 (en) | Magnetic resonance imaging method and magnetic resonance imaging apparatus | |
| Hilbert et al. | True constructive interference in the steady state (trueCISS) | |
| JP6956509B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2014502910A (ja) | インターリーブスピンロッキングイメージング | |
| JP4416221B2 (ja) | 磁気共鳴画像診断装置 | |
| JP6647816B2 (ja) | 磁気共鳴イメージング装置、画像再構成方法及び画像再構成プログラム | |
| JP2017047027A (ja) | 磁気共鳴イメージング装置及び画像処理装置 | |
| Han et al. | Free‐breathing 3D cardiac T1 mapping with transmit B1 correction at 3T | |
| JP2021029777A (ja) | 磁気共鳴データ収集方法及び磁気共鳴イメージング装置 | |
| CN110709721B (zh) | 用于使用并行发射射频线圈阵列的同时多切片磁共振指纹成像的系统和方法 | |
| Jun et al. | Zero‐DeepSub: Zero‐shot deep subspace reconstruction for rapid multiparametric quantitative MRI using 3D‐QALAS | |
| Kathiravan et al. | A review of magnetic resonance imaging techniques | |
| CA3136644A1 (en) | Dual gradient echo and spin echo magnetic resonance fingerprinting for simultaneous estimation of t1, t2, and t2* with integrated b1 correction | |
| JP4230875B2 (ja) | 磁気共鳴イメージング装置 | |
| JP7020930B2 (ja) | 磁気共鳴イメージング装置、磁気共鳴イメージングシステム及びパラメータ推定方法 | |
| Shin et al. | CNR improvement of MP2RAGE from slice encoding directional acceleration | |
| US20180286088A1 (en) | Iterative reconstruction of quantitative magnetic resonance images | |
| WO2022212245A1 (en) | Motion correction for spatiotemporal time-resolved magnetic resonance imaging | |
| Li et al. | Dual-TRACER: high resolution fMRI with constrained evolution reconstruction | |
| JP7140551B2 (ja) | 磁気共鳴イメージング装置、処理装置、および医用画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20160317 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20160929 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20161021 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190808 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6571495 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |