JP6536070B2 - 電池監視装置 - Google Patents
電池監視装置 Download PDFInfo
- Publication number
- JP6536070B2 JP6536070B2 JP2015031452A JP2015031452A JP6536070B2 JP 6536070 B2 JP6536070 B2 JP 6536070B2 JP 2015031452 A JP2015031452 A JP 2015031452A JP 2015031452 A JP2015031452 A JP 2015031452A JP 6536070 B2 JP6536070 B2 JP 6536070B2
- Authority
- JP
- Japan
- Prior art keywords
- current
- voltage
- value
- battery
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000012806 monitoring device Methods 0.000 title claims description 16
- 238000012545 processing Methods 0.000 claims description 132
- 238000005259 measurement Methods 0.000 claims description 104
- 230000005540 biological transmission Effects 0.000 claims description 22
- 238000004364 calculation method Methods 0.000 claims description 20
- 238000012544 monitoring process Methods 0.000 claims description 8
- 238000001514 detection method Methods 0.000 description 25
- 238000004891 communication Methods 0.000 description 18
- 238000000034 method Methods 0.000 description 16
- 238000012417 linear regression Methods 0.000 description 13
- 238000005070 sampling Methods 0.000 description 10
- 238000007599 discharging Methods 0.000 description 6
- 238000013500 data storage Methods 0.000 description 4
- 230000008054 signal transmission Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Landscapes
- Connection Of Batteries Or Terminals (AREA)
- Testing Of Short-Circuits, Discontinuities, Leakage, Or Incorrect Line Connections (AREA)
- Measurement Of Resistance Or Impedance (AREA)
- Tests Of Electric Status Of Batteries (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
Description
本実施形態における電池システムAは、例えば、船舶に搭載され、電力変換器Dcを介して船舶に搭載される各種負荷Ldへの放電処理や、図示しない発電機や充電器から供給される電力の充電処理を行う。
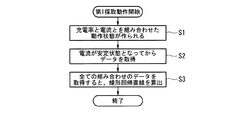
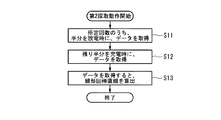
データ処理部Ksは、上述した電池ユニット端子T11,T12、電池ユニット端子T21,T22、電池ユニット端子T31,T32及び電池端子DT1,DT2と、バスバーBs1〜Bs4との結線緩みを検出するために、以下の各種動作を実行する。
Vavg = Σ(電圧合計値−電圧全体値)/n (1)
そして、演算処理部Mcは、下記式(2)に上記標本平均Vavgを代入して不偏分散S^2を算出する(ステップS23)。
S^2=Σ{(電圧合計値−電圧全体値)−Vavg)}^2/(n−1) (2)
Vavg−k×S^2/√n≦母平均≦Vavg+k×S^2/√n (3)
なお、第1緩み判定動作では、標本の数が少ない、つまり、取得したデータの数が少ないため、上記変数「k」を信頼度(95%や99%等)に基づいてt分布から決定する。
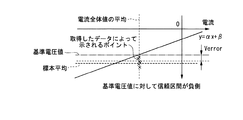
Vavg≦基準電圧値−Verror (11)
Vavg≧基準電圧値+Verror (12)
つまり、演算処理部Mcは、「Vavg」が「基準電圧値+Verror」以上である場合、結線緩みが有ると判断する。
そして、演算処理部Mcは、下記式(21)に基づいて「C」を標本とする標本平均Cavgを算出する(ステップS35)。なお、下記式(21)の値「m」は、データの個数、つまり、上記所定回数と同じ値になる。
Cavg = ΣC/m (21)
そして、演算処理部Mcは、下記式(22)に上記標本平均Cavgを代入して不偏分散S^2を算出する(ステップS36)。
S^2=Σ{(C−Cavg)}^2/(m−1) (22)
Cavg−k×S^2/√m≦母平均≦Cavg+k×S^2/√m (22)
なお、第2緩み判定動作では、標本の数が少ない、つまり、取得したデータの数が少ないため、上記変数「k」を信頼度(95%や99%等)に基づいてt分布から決定する。
Cavg≧Cerror (31)
(1)上記実施形態は、図1に示す構成となっているが、本発明はこれに限定されない。例えば、図9に示すように、線路電圧計測部Rk1,Rk2,Rk3,Rk4を備えるようにしてもよい。線路電圧計測部Rk1,Rk2,Rk3,Rk4は、バスバーBs1〜Bs4各々のボルト接続部に対して設けられ、電池ユニット端子T11,T12,T21,T22,T31,T32及び電池端子DT1,DT2を介して、バスバーBs1〜Bs4を流れる電力の電圧(つまりバスバーBs1〜Bs4の両端電圧)を検出し、検出結果をデジタル変換し、線路電圧データを通信処理部Ts1,Ts2,Ts3に出力する。通信処理部Ts1,Ts2,Ts3に出力される線路電圧データは、セル電圧データと同様、通信処理部Ts1,Ts2,Ts3を介して、演算処理部Mcに出力される。演算処理部Mcは、ボルト接続部各々における接触抵抗を求め、結線緩みが発生している場所を特定できる。また、図10のように、線路電圧計測部Rk1,Rk2,Rk3,Rk4に代わって、アナログである線路電圧検出信号を出力する線路電圧センサsd1,sd2,sd3,sd4を備えることも考えられる。線路電圧センサsd1,sd2,sd3,sd4は、線路電圧検出信号をアナログ入力部Akに出力する。アナログ入力部Akは、線路電圧検出信号をデジタル変換して、演算処理部Mcに出力する。演算処理部Mcは、ボルト接続部各々における接触抵抗を求め、結線緩みが発生している場所を特定できる。また、上記実施形態では、演算処理部Mcが、電圧検出信号、電流検出信号及びセル電圧データに基づいて上述した第1採取動作、第2採取動作、第1緩み判定動作及び第2緩み判定動作を行っているが、上述した動作を行わず、外部の監視装置やデータ記憶装置等に電圧検出信号、電流検出信号及びセル電圧データを出力し、外部に上述した動作を実行させるようにしてもよい。
Ak アナログ入力部
b11〜b13 電池セル
b21〜b23 電池セル
b31〜b33 電池セル
Bs1〜Bs4 バスバー(電力伝送部材、第2電力伝送部材)
D 電圧センサ(電圧計測手段)
Dc 電力変換器
Dk デジタル入力部
Ds デジタル出力部
DT1,DT2 電池端子
Ks データ処理部
Ld 負荷
M1,M2,M3 電池モジュール
Mc 演算処理部(接触抵抗演算手段)
Rk1,Rk2,Rk3,Rk4 線路電圧計測部(電圧計測手段)
sd1,sd2,sd3,sd4 線路電圧センサ(電圧計測手段)
Sk1,Sk2,Sk3 セル電圧計測部(電圧計測手段)
T11,T12 電池ユニット端子
T21,T22 電池ユニット端子
T31,T32 電池ユニット端子
Ts1,Ts2,Ts3 通信処理部
U1,U2,U3 二次電池ユニット
Y 電流センサ(電流計測手段)
Claims (8)
- 電池ユニット端子と電力伝送部材とがボルト接続され、前記電力伝送部材を介して外部に電力を供給する電池システムの状態を監視する電池監視装置であって、
前記電池システムの電圧を順次計測する電圧計測手段と、
前記電池システムに流れる電流を順次計測する電流計測手段と、
電流しきい値よりも小さい前記電流が計測される期間かつ変化率しきい値よりも大きい変化率の前記電流が計測される期間における前記電圧計測手段の計測値及び前記電流計測手段の計測値を除外した前記電圧計測手段の計測値及び前記電流計測手段の計測値を用いて前記電池ユニット端子と前記電力伝送部材とのボルト接続部の接触抵抗を演算する接触抵抗演算手段と
を具備することを特徴とする電池監視装置。 - 前記接触抵抗演算手段は、前記電圧計測手段の計測値及び前記電流計測手段の計測値に基づいて前記電圧及び前記電流に関する回帰直線を求め、当該回帰直線の傾きに基づいて接触抵抗を求めることを特徴とする請求項1記載の電池監視装置。
- 前記接触抵抗演算手段は、予め前記電圧計測手段の計測値及び前記電流計測手段の計測値に基づいて基準データとして前記回帰直線を求め、前記基準データとの比較に基づいてボルト接続部の緩みを判断することを特徴とする請求項2に記載の電池監視装置。
- 前記接触抵抗演算手段は、前記電流計測手段の計測値及び前記基準データに基づいて求めた電圧値と、前記電圧計測手段の計測値とを比較し、比較結果に基づいてボルト接続部の緩みを判断することを特徴とする請求項3に記載の電池監視装置。
- 前記接触抵抗演算手段は、前記電圧計測手段の計測値及び前記電流計測手段の計測値に基づいて回帰直線を求め、該回帰直線と、前記基準データとの傾きを比較し、比較結果に基づいてボルト接続部の緩みを判断することを特徴とする請求項3に記載の電池監視装置。
- 前記接触抵抗演算手段は、前記電圧計測手段の計測値及び前記電流計測手段の計測値をローパスフィルタ処理することにより、前記電流しきい値よりも小さく、かつ、前記変化率しきい値よりも大きい変化率の前記電流が計測される期間における前記電圧計測手段の計測値及び前記電流計測手段の計測値を除外することを特徴とする請求項1に記載の電池監視装置。
- 前記電池システムが複数の二次電池ユニットの電池ユニット端子を電力伝送部材を介してボルト接続したものである場合、
前記電圧計測手段は、前記電池ユニット端子によるボルト接続部に対して設けられることを特徴とする請求項1〜6のいずれか一項に記載の電池監視装置。 - 前記電圧計測手段は、前記電力伝送部材による各々のボルト接続部に対して設けられ、
前記接触抵抗演算手段は、前記ボルト接続部の各々について接触抵抗を演算することを特徴とする請求項1〜7のいずれか一項に記載の電池監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015031452A JP6536070B2 (ja) | 2015-02-20 | 2015-02-20 | 電池監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015031452A JP6536070B2 (ja) | 2015-02-20 | 2015-02-20 | 電池監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016153731A JP2016153731A (ja) | 2016-08-25 |
| JP6536070B2 true JP6536070B2 (ja) | 2019-07-03 |
Family
ID=56760622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015031452A Expired - Fee Related JP6536070B2 (ja) | 2015-02-20 | 2015-02-20 | 電池監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6536070B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11201478B2 (en) | 2016-09-13 | 2021-12-14 | Sanyo Electric Co., Ltd. | Management device and power supply system for improved cell voltage detection accuracy |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05266756A (ja) * | 1992-03-18 | 1993-10-15 | Ngk Insulators Ltd | 断路器における接点不良検出器 |
| US6160402A (en) * | 1998-08-28 | 2000-12-12 | Motorola, Inc. | Method and apparatus for determining contact resistance |
| JP5390779B2 (ja) * | 2008-03-12 | 2014-01-15 | エスペック株式会社 | 接続品質検査装置及び接続品質検査方法 |
| TWI398660B (zh) * | 2010-02-10 | 2013-06-11 | Chung Shan Inst Of Science | 電池模組檢測裝置及電池模組檢測方法 |
| JP5145380B2 (ja) * | 2010-07-06 | 2013-02-13 | 三菱重工業株式会社 | 電池システム |
| JP2012169244A (ja) * | 2011-01-26 | 2012-09-06 | Toyota Motor Corp | 電池の製造方法およびナット締結装置 |
| JP2012225692A (ja) * | 2011-04-15 | 2012-11-15 | Nippon Soken Inc | 接触異常検知装置 |
-
2015
- 2015-02-20 JP JP2015031452A patent/JP6536070B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016153731A (ja) | 2016-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1463144B1 (en) | Method for judging state of assembled battery | |
| EP3992648B1 (en) | Apparatus and method for diagnosing battery | |
| JP5777303B2 (ja) | 電池劣化検知装置および電池劣化検知方法ならびにそのプログラム | |
| EP3993222A1 (en) | Battery management circuit, battery management device, and battery management network | |
| US20140084867A1 (en) | Secondary battery device and battery capacity estimation system | |
| EP3940404B1 (en) | Battery resistance diagnosis device and method | |
| EP2551686A1 (en) | Charge state estimation apparatus | |
| EP2963432A1 (en) | Device for assessing extent of degradation in secondary cell | |
| WO2018172216A1 (en) | Battery energy store | |
| JP2008288192A (ja) | 蓄電装置の異常検出装置及び方法並びにプログラム | |
| KR20020064998A (ko) | 배터리 성능 측정 시스템 및 측정방법 | |
| KR20160110211A (ko) | 전지 잔량 예측 장치 및 배터리 팩 | |
| JP4818808B2 (ja) | 組電池状態測定装置、組電池劣化判定方法および組電池劣化判定プログラム | |
| JP7515956B2 (ja) | 電池診断装置および方法 | |
| JP2007309839A (ja) | 組電池状態測定装置、組電池劣化判定方法および組電池劣化判定プログラム | |
| CN118633221A (zh) | 用于能量存储系统中的健康状态估计的系统、方法和设备 | |
| JP2015069964A (ja) | 異常判定装置 | |
| KR20160080802A (ko) | 배터리 팩의 저항 측정 장치 및 방법 | |
| EP4092805A1 (en) | Device, measurement device, method, and measurement method | |
| CN114879066A (zh) | 一种电池包一致性评估方法及系统 | |
| CN114503392B (zh) | 涉及多个电池的判定装置、蓄电系统、判定方法和非易失性存储介质 | |
| TW202304096A (zh) | 用於電化學系統之即時主動測量之方法 | |
| JP6536070B2 (ja) | 電池監視装置 | |
| JP2007311255A (ja) | 組電池状態測定装置、組電池劣化判定方法および組電池劣化判定プログラム | |
| EP3812779B1 (en) | Analyzing electrical impedance measurements of an electrochemical battery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181005 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190520 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6536070 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |