JP6525595B2 - 宇宙浮遊物捕捉装置 - Google Patents
宇宙浮遊物捕捉装置 Download PDFInfo
- Publication number
- JP6525595B2 JP6525595B2 JP2015003144A JP2015003144A JP6525595B2 JP 6525595 B2 JP6525595 B2 JP 6525595B2 JP 2015003144 A JP2015003144 A JP 2015003144A JP 2015003144 A JP2015003144 A JP 2015003144A JP 6525595 B2 JP6525595 B2 JP 6525595B2
- Authority
- JP
- Japan
- Prior art keywords
- space floating
- space
- capturing
- floating object
- matter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000853 adhesive Substances 0.000 claims description 42
- 230000001070 adhesive effect Effects 0.000 claims description 42
- 238000001514 detection method Methods 0.000 claims description 25
- 239000012790 adhesive layer Substances 0.000 claims description 13
- 238000010304 firing Methods 0.000 claims description 11
- 239000000463 material Substances 0.000 description 47
- 238000000034 method Methods 0.000 description 15
- 239000012634 fragment Substances 0.000 description 12
- 230000006378 damage Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000005484 gravity Effects 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000002347 injection Methods 0.000 description 3
- 239000007924 injection Substances 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 239000002344 surface layer Substances 0.000 description 3
- 239000003795 chemical substances by application Substances 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 1
- 235000015842 Hesperis Nutrition 0.000 description 1
- 235000012633 Iberis amara Nutrition 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 239000003818 cinder Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 239000010410 layer Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000004449 solid propellant Substances 0.000 description 1
Images






Landscapes
- Manipulator (AREA)
Description
前記宇宙浮遊物を検知する検知手段が設けられた装置本体と、
前記装置本体に設けられ、前記宇宙浮遊物を捕捉する捕捉手段と、を備え、
前記捕捉手段は、前記検知手段が検知した前記宇宙浮遊物に向けて、前記宇宙浮遊物の表面に接着固定される接着体を前記装置本体から紐付き状態で発射し、前記宇宙浮遊物と前記装置本体とを相互連結するものであり、
前記接着体は、前記装置本体との間で紐連結されるプランジャ部と、前記プランジャ部の先端面に形成された紫外線硬化性接着層とを有し、
前記装置本体には、発射前の前記接着体を紫外線から遮蔽するシャッタ手段が設けられ、
前記捕捉手段は、前記シャッタ手段による紫外線の遮蔽状態が解除されたのちに前記接着体を発射することを特徴とする。
かかる本発明の態様によれば、宇宙浮遊物の表面に接着体を接着固定して宇宙浮遊物を捕捉するため、比較的簡単な構成で宇宙浮遊物を破壊することなく捕捉できる。
かかる本発明の態様によれば、紫外線がプランジャ部を透過して紫外線硬化性接着層に入射するため、宇宙浮遊物の表面に対して接着体をより早く接着固定できる。
かかる本発明の態様によれば、検知した宇宙浮遊物に接近して捕捉することが可能となる。
かかる本発明の態様によれば、自装置が離脱手段を備えることで、捕捉した宇宙浮遊物を所定の軌道から離脱させることができる。
かかる本発明の態様によれば、自装置が宇宙浮遊物の位置を判断して捕捉することが可能となる。
かかる本発明の態様によれば、自装置で宇宙浮遊物の視差画像を取得し、例えば、別の衛星や地上設備に送信して、宇宙浮遊物が捕捉可能な位置に存在するか否かを知ることが可能となる。
かかる本発明の態様によれば、複数の宇宙浮遊物を捕捉することが可能となる他、1つの宇宙浮遊物に対して複数の接着体を接着固定することも可能となる。
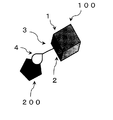
200 宇宙浮遊物
1 装置本体
11 シャッタ
11a モータ
12 開口部
13 GPSセンサ
2 観測手段
21 ステレオカメラ
3 捕捉手段
31 推力発生部
31a スプリング
31b ラッチ
31c アクチュエータ
4 接着体
41 プランジャ部
42 接着層
43 ワイヤロープ
44 リール
5 推進手段
51 ノズル
52 タンク
6 離脱手段
7 制御手段
71 制御部
72 演算部
8 電源手段
81 太陽電池
82 充電池
Claims (4)
- 宇宙浮遊物を捕捉する宇宙浮遊物捕捉装置であって、
前記宇宙浮遊物を検知する検知手段が設けられた装置本体と、
前記装置本体に設けられ、前記宇宙浮遊物を捕捉する捕捉手段と、を備え、
前記捕捉手段は、前記検知手段が検知した前記宇宙浮遊物に向けて、前記宇宙浮遊物の表面に接着固定される接着体を前記装置本体から紐付き状態で発射し、前記宇宙浮遊物と前記装置本体とを相互連結するものであり、
前記接着体は、前記装置本体との間で紐連結されるプランジャ部と、前記プランジャ部の先端面に形成された紫外線硬化性接着層とを有し、
前記装置本体には、発射前の前記接着体を紫外線から遮蔽するシャッタ手段が設けられ、
前記捕捉手段は、前記シャッタ手段による紫外線の遮蔽状態が解除されたのちに前記接着体を発射することを特徴とする宇宙浮遊物捕捉装置。 - 前記プランジャ部は、紫外線を透過する部材から設けられたことを特徴とする請求項1に記載の宇宙浮遊物捕捉装置。
- 前記検知手段は、前記捕捉手段によって前記宇宙浮遊物を捕捉可能な射程範囲内に前記宇宙浮遊物が存在するか否か判断するための視差画像を取得する画像読取手段であることを特徴とする請求項1または2に記載の宇宙浮遊物捕捉装置。
- 前記捕捉手段は、前記装置本体の複数箇所に設けられたことを特徴とする請求項1乃至3のいずれか1項に記載の宇宙浮遊物捕捉装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015003144A JP6525595B2 (ja) | 2015-01-09 | 2015-01-09 | 宇宙浮遊物捕捉装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015003144A JP6525595B2 (ja) | 2015-01-09 | 2015-01-09 | 宇宙浮遊物捕捉装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016128285A JP2016128285A (ja) | 2016-07-14 |
| JP6525595B2 true JP6525595B2 (ja) | 2019-06-05 |
Family
ID=56383977
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015003144A Active JP6525595B2 (ja) | 2015-01-09 | 2015-01-09 | 宇宙浮遊物捕捉装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6525595B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101899218B1 (ko) * | 2016-11-21 | 2018-09-17 | 한찬희 | 우주쓰레기 처리시스템 |
| WO2020174453A1 (en) * | 2019-02-28 | 2020-09-03 | Oqab Dietrich Induction Inc. | Systems and methods for controlling a target satellite |
| CN111400902B (zh) * | 2020-03-13 | 2021-06-22 | 北京星际荣耀空间科技股份有限公司 | 火箭残骸落区的估计方法、装置、电子设备及存储介质 |
| JP7653934B2 (ja) * | 2022-02-02 | 2025-03-31 | 三菱電機株式会社 | 衛星見守りシステム、見守り衛星、見守りセンター、インフラストラクチャ衛星、および、衛星情報伝送方法 |
| WO2023157951A1 (ja) * | 2022-02-17 | 2023-08-24 | 株式会社アストロスケール | 協力物体化システム及び協力物体化方法 |
| CN116588356B (zh) * | 2023-05-30 | 2025-12-19 | 哈尔滨工业大学 | 一种航天器防护系统及其防护方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2728081B2 (ja) * | 1996-04-15 | 1998-03-18 | 日本電気株式会社 | 宇宙構造物の伸展構造 |
| JP2000190900A (ja) * | 1998-12-28 | 2000-07-11 | Nec Corp | 宇宙デブリ検出方法および宇宙デブリ検出装置 |
| WO2012096982A1 (en) * | 2011-01-10 | 2012-07-19 | Sri International | Electroadhesive system for capturing objects |
| DE102011100971A1 (de) * | 2011-05-09 | 2012-11-15 | Astrium Gmbh | Vorrichtung zum Einfangen von Weltraum-Müll |
| EP2774855B1 (en) * | 2011-11-02 | 2020-01-08 | IHI Corporation | Device for removing space debris and method for removing space debris |
| US8979034B2 (en) * | 2011-12-06 | 2015-03-17 | Altius Space Machines | Sticky boom non-cooperative capture device |
| JP2014098107A (ja) * | 2012-11-15 | 2014-05-29 | Nitto Denko Corp | 宇宙空間で用いる把持材料 |
-
2015
- 2015-01-09 JP JP2015003144A patent/JP6525595B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016128285A (ja) | 2016-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6525595B2 (ja) | 宇宙浮遊物捕捉装置 | |
| JP6473960B2 (ja) | スペースデブリの軌道降下方法、軌道降下システム、及び、人工衛星の軌道変換方法、軌道変換システム | |
| JP6542294B2 (ja) | マルチモードの無人航空機 | |
| JP6472600B2 (ja) | 宇宙用装置、デブリ除去システム及びデブリ除去方法 | |
| AU2016213945B2 (en) | Landing and charging system for drones | |
| JP6923146B6 (ja) | 無人航空機、無人航空機の飛行制御機構、及びこれらを用いる方法 | |
| WO2015152376A1 (ja) | デブリ除去装置及びデブリ除去システム | |
| EP2774855A1 (en) | Device for removing space debris and method for removing space debris | |
| US9038959B2 (en) | Space debris remover | |
| US20180222604A1 (en) | Satellite propelled by laser ablation | |
| JP2025063047A (ja) | マルチオブジェクトスペースデブリ除去のための方法及びシステム | |
| US12428140B2 (en) | Unmanned aerial vehicle, and method for using same | |
| Kubitschek et al. | Deep impact autonomous navigation: the trials of targeting the unknown | |
| Kawamoto et al. | Current status of research and development on active debris removal at JAXA | |
| Kaplan et al. | Engineering issues for all major modes of in situ space debris capture | |
| Yano et al. | Asteroidal surface sampling by the MUSES-C spacecraft | |
| Kawaguchi | Hayabusa, summary of guidance, navigation and control achievement in its proximity phase | |
| Kawaguchi et al. | The MUSES-C, world's first sample and return mission from near Earth asteroid: NEREUS | |
| Forshaw et al. | An in-orbit active debris removal mission-REMOVEDEBRIS: Pre-Launch update | |
| Kubota et al. | Touchdown dynamics for sample collection in Hayabusa mission | |
| Kawaguchi et al. | Hayabusa, detailed guidance and navigation operations during descents and touchdowns | |
| JP6472772B2 (ja) | 対象物の除去方法、運搬方法及び制御方法 | |
| Kubitschek et al. | The challenges of deep impact autonomous navigation | |
| JP6473004B2 (ja) | 破壊状態観測装置と方法 | |
| US9481476B2 (en) | Space object disposal device and space object disposal method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171227 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20171227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6525595 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |