以下、図を参照して本実施形態による通信中継装置50が搭載された飛行体20を含む通信システム1について説明する。
(第1の実施形態)
[通信システム1の構成]
図1は、通信システム1の構成図の一例を示す図である。通信システム1は、基地局8と、中継制御装置10−1から10−nと、携帯端末装置15−1から15−nと、通信中継装置50が搭載された飛行体20とを含む。飛行体20は、携帯端末装置15−1から15−nおよび中継制御装置10と無線通信する。以下、中継制御装置10−1から10−nを区別しない場合は、単に中継制御装置10という。また、以下、携帯端末装置15−1から15−nを区別しない場合は、単に携帯端末装置15という。
基地局8は、自局の周囲の携帯端末装置15と通信する。また、基地局8は、中継制御装置10と通信する。中継制御装置10は、複数の基地局8又は飛行体20と通信する。中継制御装置10は、自装置と通信する基地局8又は飛行体20に搭載された通信中継装置50を制御する。中継制御装置10は、交換機(不図示)に接続される。交換機は、複数の中継制御装置10と通信する。
携帯端末装置15は、例えば利用者に携帯される携帯電話やスマートフォン、タブレット端末である。携帯端末装置15は、音声や文字により装置間で相互に通信が可能な通信装置である。携帯端末装置15は、音声情報と、画像情報とを同一の回線で送受信可能な、インターネット等の通信ネットワーク(図示せず)に接続が可能である。携帯端末装置15は、基地局8又は飛行体20に搭載された通信中継装置50を経由して、中継制御装置10および通信ネットワークに接続する。
[飛行体20の構成]
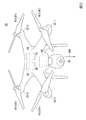
図2は、通信中継装置50が搭載された飛行体20の外観構成の一例を示す図である。飛行体20は、ロータRT1からRT4と、モータ22−1から22−4と、GPS受信部24と、カメラ26と、センサ28と、端末通信アンテナ52と、中継用通信アンテナ54と、制御部60とを備えている。端末通信アンテナ52と、中継用通信アンテナ54と、制御部60とを合わせたものは、「通信中継装置」の一例である。
ロータRT1からRT4は回転体(回転翼)である。以下、ロータRT1からRT4を、区別しない場合は単にロータRTと称する。モータ22−1から22−4は、ロータRTを回転させることにより、飛行体20に揚力及び推進力を与える。この一例では、飛行体20は、モータ22−1から22−4を備える。モータ22−1から22−4は、対応するロータRT1からRT4を回転させる。飛行体20は、それぞれのモータ22に供給する駆動電流を制御することにより、自機の位置、方位、進行方向を制御する。なお、ロータおよびモータの数は4つに限らず、任意の数でよい。
GPS受信部24は、GPS(Global Positioning System)衛星が送信する電波を受信する。このGPS衛星が送信する電波には、この電波を受信した位置、つまり、飛行体20の位置を特定するための信号が含まれている。GPS受信部24は、GPS衛星から受信した電波をGPS信号に変換し、変換したGPS信号を通信中継装置50に出力する。なお、この一例では、GPS受信部24は、GPS衛星が送信する電波を受信する場合について説明するが、これに限られない。例えば、GPS受信部24は、測位精度の高い準天頂衛星など、GPS衛星以外の人工衛星からの電波を受信してもよい。
撮像部、すなわちカメラ26は、飛行体20の周辺の風景を撮像する。カメラ26は、撮像した風景の画像を、周辺画像として通信中継装置50に出力する。この一例では、カメラ26の撮像方向と、飛行体20の機首方位HDGとが一致している。この場合、カメラ26は、自機の前方の風景を撮像する。
センサ28は、例えばジャイロセンサや、高度センサ、測距センサ等である。ジャイロセンサは、飛行体20の機体の姿勢を検出する。高度センサは、飛行体20の機体の鉛直下方にレーザを投光し、投光したレーザの反射光を受光する。高度センサは、例えば受光した光の位相の遅れに基づいて、飛行体20の高度を算出する。また、高度センサは、例えば自機の飛行位置の気圧を算出し、算出した気圧から高度を算出するセンサであってもよい。測距センサは、飛行体20の機体の水平方向にレーザを投光し、投光したレーザの反射光を受光する。測距センサは、例えば受光した光の位相の遅れに基づいて、飛行体20の周辺に存在する物体を検出する。
端末通信アンテナ52は、携帯端末装置15から送信された電波を受信したり、携帯端末装置15に電波を送信したりする。飛行体20は、端末通信アンテナ52を介して携帯端末装置15と通信を行う。中継用通信アンテナ54は、中継制御装置10から送信された電波を受信したり、中継制御装置10に電波を送信したりする。飛行体20は、中継用通信アンテナ54を介して中継制御装置10と通信する。
[制御部60の構成]
図3は、通信中継装置50の機能構成の一例を示す図である。通信中継装置50の制御部60は、上述したモータ22と、GPS受信部24と、カメラ26と、センサ28と、端末通信アンテナ52と、中継用通信アンテナ54とに接続される。端末通信アンテナ52と、中継用通信アンテナ54との説明は、上述したため省略する。
制御部60は、記憶部62と、自機位置算出部66と、移動制御部68と、通信制御部70と、通信量検出部72と、位置決定部74とを備える。移動制御部68と、位置決定部74とを合わせたものは、「飛行位置制御部」の一例である。記憶部62は、不揮発性または揮発性の半導体メモリを備えている。記憶部62には、飛行計画情報64が記憶されている。飛行計画情報64とは飛行体20の飛行計画や目的地等を示す情報である。この半導体メモリは、通信中継装置50から取り外せる可搬型のICメモリであってもよく、通信中継装置50から取り外せないフラッシュROM等であってもよい。
なお、この一例においては、通信中継装置50が記憶部62を備え、この記憶部62に、飛行計画情報64が記憶される場合について説明するが、これに限られない。通信中継装置50は、飛行計画情報64を記憶部62に記憶させることなく、又は飛行計画情報64を記憶部62に記憶させつつ、飛行計画情報64を無線通信によって他の装置から受信してもよい。他の装置とは、例えば飛行体20とは別体であり、飛行体20を操作することができる操作コントローラである。
自機位置算出部66は、飛行体20の位置、すなわち自機位置を算出する。自機位置算出部66は、例えばGPS受信部24が出力するGPS信号SGに基づいて、既知の演算を行うことにより、自機位置情報IPを算出する。この自機位置情報IPには、自機である飛行体20の緯度、経度、高度が含まれている。自機位置算出部66は、算出した自機位置情報IPを、移動制御部68に出力する。
なお、自機位置算出部66は、GPS信号SGに加えて、又はGPS信号SGに代えて、カメラ26が出力する周辺画像PICに基づいて、自機位置情報IPを算出してもよい。この場合、自機位置算出部66は、予め記憶されている風景画像の情報と、カメラ26によって撮像された周辺画像PICとを比較することにより、自機位置情報IPを算出する。これにより、自機位置算出部66は、GPS衛星からの電波を受信できない状況であっても、自機位置を算出することができる。また、自機位置算出部66は、センサ28の検出結果に基づいて、自機の位置や高度を算出してもよい。
移動制御部68は、飛行体20の移動を制御する。移動制御部68は、自機位置算出部66により算出された自機位置情報IPと、飛行計画情報64に記憶された飛行体20の目的地点の座標とを比較することにより、目的地までの飛行ルートを算出する。また、移動制御部68は、算出した飛行ルートに沿って飛行体20が飛行するように、既知の演算によりモータ22の駆動電流DCを制御する。モータ22は、移動制御部68の制御に基づいて回転する。これにより、飛行体20は、目的地に向けて飛行ルートに沿って飛行する。
通信制御部70は、端末通信アンテナ52が携帯端末装置15から受信する電波に含まれる情報を、中継用通信アンテナ54を介して中継制御装置10に転送する。また、通信制御部70は、中継用通信アンテナ54が中継制御装置10から受信する電波に含まれる情報を、端末通信アンテナ52を介して携帯端末装置15に転送する。
通信量検出部72は、端末通信アンテナ52を介して携帯端末装置15との間で行われる通信の通信量を検出する。また、通信量検出部72は、中継用通信アンテナ54を介して中継制御装置10との間で行われる通信の通信量を検出する。
位置決定部74は、端末通信アンテナ52を介した携帯端末装置15との間の通信容量又は中継用通信アンテナ54を介した中継回線との通信の通信容量と、通信量検出部72が検出する通信量とに基づいて、自機の飛行位置を決定する。位置決定部74は、携帯端末装置15との通信の通信容量又は中継制御装置10との通信の通信容量に対する、通信量検出部72が検出する通信量の割合に応じて、自機の水平方向の位置を決定する。通信容量とは、所定時間あたりに通信することができるデータの上限を示す量である。通信容量は、予め人為的に設定された上限であってもよいし、装置の仕様によって制限された上限であってもよい。
[制御部60の動作1]
図4は、制御部60により実行される処理の流れを示すフローチャートである。まず、位置決定部74が、通信量検出部72が検出した通信量を取得する(ステップS100)。次に、位置決定部74は、通信容量に対する通信量の割合を算出する(ステップS102)。通信容量とは、端末通信アンテナ52を介した携帯端末装置15との通信の通信容量又は中継用通信アンテナ54を介した中継回線との通信の通信容量である。
次に、位置決定部74は、ステップS102で算出した通信量が、所定の割合以上であるか否かを判定する(ステップS104)。ステップS102で算出した通信量が、所定の割合未満である場合、位置決定部74は、自機を水平方向に移動させる方向を決定する(ステップS106)。水平方向に移動させる方向(第1の方向)は、予め設定されていてもよいし、任意の方向であってもよい。
ステップS102で算出した通信量が、所定の割合以上である場合、位置決定部74は、自機を水平方向に移動させずに、現在の位置を維持すると決定する(ステップS108)。次に、移動制御部68が、ステップS106で決定された方向に自機を制御して移動させる。または、移動制御部68が、ステップS108で決定したように自機を制御して現在の位置に維持させる(ステップS110)。これにより本フローチャートの1ルーチンは終了する。なお、ステップS106で自機を水平方向に移動させると決定し、ステップS110の処理の後に、後述する図6に示す処理を実行する。
[飛行体20の具体的な動作1]
端末通信アンテナ52は、飛行体20の高度が一定の場合、通信範囲が一定の電波を地上に向けて送信する。通信範囲とは、例えば飛行体20が携帯端末装置15に対してサービスを提供する範囲である。サービスとは、携帯端末装置15をネットワークへ接続させることである。例えば、端末通信アンテナ52は、端末通信アンテナ52を頂点とする円錐状の電波や、扇状の電波を地上に向けて送信する。
図5は、飛行体20の位置と、端末通信アンテナ52の通信範囲との関係を示す図である。図中、縦軸は飛行高度を示し、横軸は距離(通信範囲の直径)を示している。図示する例では、端末通信アンテナ52が送信する電波は円錐状であるものとして説明する。通信容量に対する通信量の割合が所定の割合未満である場合、制御部60は、自機を水平方向(第1の移動方向)に移動させる。飛行体20が水平方向に移動することで、現在の位置で携帯端末装置15との間で通信する通信量を増加させる位置を探索することができる。なお、制御部60は、通信容量に対する通信量の割合が所定の割合未満である場合であっても、通信量が短時間に急激に低下して割合が所定の割合未満になったような場合には、直ぐに通信量が上昇する可能性があるので、自機を静止させてもよい。
図示する例では、飛行体20が位置P1に位置した場合の通信量は、飛行体20が位置Pに位置した場合の通信量より多いものとして説明する。位置Pに飛行体20が存在するとき、通信容量に対する通信量の割合が所定の割合未満である場合、飛行体20は、上述した処理により位置P1に移動する。これにより、飛行体20の通信中継装置50が、通信する通信量が増加する。このように、通信容量に対する通信量の割合が所定未満の場合、飛行体20が水平方向に移動することで、例えば、より多くの携帯端末装置15との間で通信することができる。この結果、通信中継装置50は、利用者にとってより利便性が高い通信環境を提供することができる。
[制御部60の動作2]
図6は、制御部60により実行される水平方向に移動後に実行される処理の流れを示すフローチャートである。本処理は、例えば図4のステップS106で自機を水平方向に移動させると決定され、ステップS110の処理後に実行される処理である。
まず、位置決定部74が、通信量検出部72が検出した通信量を取得する(ステップS120)。次に、位置決定部74は、通信容量に対する通信量の割合を算出する(ステップS122)。次に、位置決定部74は、ステップS122で算出した割合が、前回算出された通信容量に対する通信量の割合が増加したか否かを判定する(ステップS124)。前回算出された通信容量に対する通信量の割合とは、例えば直近に算出された通信容量に対する通信量の割合である。すなわち、図4のステップS102で算出された通信量の割合、又は1ルーチン前の図6のステップS122の処理で算出された通信量の割合である。
ステップS124で通信容量に対する通信量の割合が増加した場合、位置決定部74は、自機の移動方向を第1の移動方向に決定する(ステップS126)。ステップS124で通信容量に対する通信量の割合が増加していない場合、位置決定部74は、自機を第1の移動方向とは異なる水平方向の移動方向(第2の移動方向)を決定する(ステップS128)。第2の移動方向は、第1の移動方向とは異なる水平方向の移動方向であればよく、予め設定されていてもよいし、任意の方向であってもよい。なお、ステップS124で通信容量に対する通信量の割合が変化していない(または所定の割合の範囲内でのみ変化している)場合、位置決定部74は、自機を現在の位置に維持させると決定してもよいし、自機を第1の移動方向または第2の移動方向に移動させると決定してもよい。また、ステップS124で通信容量に対する通信量の割合が増加した場合、位置決定部74は、自機を現在の位置に維持させると決定してもよい。
また、位置決定部74は、通信中継装置50と携帯端末装置15との接続時間に基づいて、自機を移動させるか否かを決定してもよい。例えば制御部60は、通信中継装置50と接続中の携帯端末装置15の識別情報を携帯端末装置15から取得し、取得した識別情報を記憶部62に記憶させる。位置決定部74は、記憶部62に記憶された情報と、通信中継装置50と携帯端末装置15との接続状態とに基づいて、同一の携帯端末装置15と中継通信装置50との接続時間が所定時間を超えている場合、自機を移動させず、自機を現在の位置に維持させると決定する。このように、所定時間の間、同一の携帯端末装置15と通信中継装置50とが接続されている場合、その携帯端末装置15を所持する利用者の通信の利用を確保することで、利用者の利便性を向上させることができる。一方、位置決定部74は、記憶部62に記憶された情報と、中継通信装置50と携帯端末装置15との接続状態とに基づいて、中継通信装置50と携帯端末装置15との接続時間が所定時間を超えている携帯端末装置15が存在しないと判定した場合(または所定数以下であると判定した場合)、自機を第1の移動方向または第2の移動方向に移動させると決定する。
次に、移動制御部68が、ステップS126またはステップS128で決定された方向に自機を制御して移動させる(ステップS130)。これにより本フローチャートの1ルーチンは終了する。
なお、上述した処理では、位置決定部74は、ステップS124で通信容量に対する通信量の割合が増加したか否かを判定したが、通信量が直近に検出された通信量より増加したか否かを判定してもよい。例えば位置決定部74は、通信量が直近に検出された通信量より増加した場合、ステップS126に進み、通信量が直近に検出された通信量より増加していない場合、ステップS128に進む。この場合、位置決定部74は、ステップS122の通信容量に対する通信量の割合を算出する処理を省略する。
[飛行体20の具体的な動作2]
図7は、制御部60が、自機を第1の移動方向に移動させた後の自機の挙動の一例を示す図である。前述した図5の説明と重複部分の説明は省略する。図示する例では、通信容量に対する通信量の割合が所定の割合未満であり、飛行体20が第1の移動方向に移動し、位置P1に位置した後の挙動について説明する。飛行体20が第1の移動方向に移動した後、通信容量に対する通信量の割合が増加した場合、飛行体20は、第1の移動方向に継続して移動する(ステップS126およびS130参照)。これにより、飛行体20は位置P2に移動する。
飛行体20が継続して第1の移動方向に移動した後(例えば位置P2に移動した後)、次のルーチンの処理において、通信容量に対する通信量の割合が増加しなかった(図示する例では減少した)場合、飛行体20は、第1の移動方向とは異なる第2の移動方向に移動する(ステップS128およびS130参照)。なお、図4のステップS106およびステップS110の処理後に飛行体20が位置P1に移動した後、通信容量に対する通信量の割合が増加しなかった場合(ステップS124:NO)も同様に、飛行体20は第2の移動方向に移動する。
このように、飛行体20が第1の移動方向に移動した後に、通信容量に対する通信量の割合が、直近で算出した通信容量に対する通信量の割合より増加していない場合は、第1の移動方向とは異なる第2の移動方向に飛行体20は移動する。これにより飛行体20が搭載する通信中継装置50は、例えば、より多くの携帯端末装置15との間で通信することができる位置を探索する。この結果、通信中継装置50は、探索した位置で携帯端末装置15と通信することにより、利用者にとってより利便性が高い通信環境を提供することができる。
例えば、コンサート会場や、イベント会場なとの人が多く集まる施設で通信中継装置50が搭載された飛行体20を飛行させると好適である。例えば、コンサート会場やイベント会場では、携帯端末装置15を所持している人(利用者)が多く集まり、利用者の位置は流動的である。例えば、飛行体20の水平方向の位置を固定し、通信範囲を固定した場合、その通信範囲には携帯端末装置15が存在しない場合ある。これに対して、通信中継装置50は、通信容量と通信量とに基づいて、飛行体20の水平方向の位置を決定する。通信中継装置50は、通信量が通信容量に近づくように飛行体20の水平方向の位置を制御する。これにより、通信中継装置50は、利用者にとってより利便性が高い通信環境を提供することができる。また、通信中継装置50は、より効率的に通信設備を利用することができる。
以上説明した第1の実施形態によれば、通信中継装置50は、端末通信アンテナ52を介した携帯端末装置15との通信の通信容量又は中継通信アンテナ54を介した中継制御装置10との通信の通信容量と、通信量検出部72が検出する通信量とに基づいて、自機の飛行位置を制御することで、利用者にとってより利便性が高い通信環境を提供することができる。
(第2の実施形態)
以下、第2の実施形態について説明する。ここでは、第1の実施形態との相違点を中心に説明し、第1の実施形態と共通する機能等についての説明は省略する。第1の実施形態では、飛行体20の制御部60は、通信容量に対する通信量検出部72が検出する通信量の割合に応じて、飛行体20の位置を制御するものとした。これに対して、第2の実施形態では、制御部60は、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数に基づいて、飛行体20の位置を制御する。
図8は、第2の実施形態の通信中継装置50Aの機能構成の一例を示す図である。第2の実施形態の通信中継装置50Aは、第1の実施形態の機能構成に代えて、端末数取得部73を備える。端末数取得部73は、中継用通信アンテナ54により受信された情報に基づいて、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数を取得する。制御部60は、端末通信アンテナ52と携帯端末装置15との通信結果を、中継用通信アンテナを介して中継制御装置10に送信する。基地局8は、自局と携帯端末装置15との通信結果を中継制御装置10に送信する。中継制御装置10は、自装置が制御する基地局8の通信範囲にある携帯端末装置15の数、または通信中継装置50Aの通信範囲にある携帯端末装置15の数を監視する。中継制御装置10は、通信中継装置50Aの通信範囲にある携帯端末装置15の数を示す情報を通信中継装置50Aに送信する。位置決定部74は、端末数取得部73が取得する携帯端末装置15の数に基づいて、飛行体20の位置を決定する。
図9は、第2の実施形態の通信中継装置50Aにより実行される処理の流れを示すフローチャートである。まず、端末数取得部73が、中継用通信アンテナ54により受信された情報に基づいて、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数を取得する(ステップS200)。次に、位置決定部74が、ステップS200で取得した携帯端末装置15の数が、所定数以上であるか否かを判定する(ステップS202)。携帯端末装置15の数が所定数未満である場合、位置決定部74は、自機を水平方向に移動させる方向を決定する(ステップS204)。水平方向に移動させる方向(第1の方向)は、予め設定されていてもよいし、任意の方向であってもよい。
携帯端末装置15の数が所定数以上である場合、位置決定部74は、自機を水平方向に移動させずに、現在の位置を維持すると決定する(ステップS206)。次に、移動制御部68が、ステップS204で決定された方向に自機を制御する。または、移動制御部68が、ステップS206で決定したように自機を制御して現在の位置に維持させる(ステップS208)。
次に、端末数取得部73が、中継用通信アンテナ54により受信された情報に基づいて、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数を取得する(ステップS210)。次に、位置決定部74が、ステップS210で取得した携帯端末装置15の数が、ステップS200で取得した携帯端末装置15の数に比して、増加したか否かを判定する(ステップS212)。
ステップS210で取得した携帯端末装置15の数が、ステップS200で取得した携帯端末装置15の数に比して増加していない場合、位置決定部74は、自機を水平方向に移動させる第1の移動方向とは異なる方向(第2の移動方向)を決定する(ステップS214)。第2の移動方向は、第1の移動方向とは異なる水平方向であればよく、予め設定されていてもよいし、任意の方向であってもよい。
ステップS210で取得した携帯端末装置15の数が、ステップS200で取得した携帯端末装置15の数に比して増加した場合、位置決定部74は、自機の移動方向を第1の移動方向に決定する(ステップS216)。本処理における第1の移動方向は、ステップS204で決定した移動方向である。次に、移動制御部68が、ステップS214で決定された方向に自機を制御して移動させる。または、移動制御部68が、ステップS216で決定されたように自機を制御して現在の位置に維持させる(ステップS218)。これにより本フローチャートの1ルーチンは終了する。
なお、端末数取得部73は、記憶部62から端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数を取得してもよい。この場合、記憶部62には、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数や、携帯端末装置15の識別情報等が記憶されている。通信中継装置50Aは、中継制御装置10から携帯端末装置15の数や、識別情報等を取得し、取得した情報を記憶部62に記憶させる。また、端末数取得部73は、端末通信アンテナ52と携帯端末装置15との通信結果に基づいて、携帯端末装置15の数を算出してもよい。
以上説明した第2の実施形態によれば、通信中継装置50Aは、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数に基づいて、飛行体20の位置を制御することで、利用者にとってより利便性が高い通信環境を提供することができる。
なお、通信中継装置50Aは、通信量検出部72と、携帯端末取得部73とを備えてもよい。この場合、位置決定部74は、例えば予め設定された優先度や予め設定された条件を参照し、通信量検出部72が検出する通信量、又は端末数取得部73が取得した携帯端末装置15の数に基づいて、自機の位置を決定してもよい。また、第1の実施形態と第2の実施形態とは異なる実施形態として説明したが、第1の実施形態と第2の実施形態とを組み合わせて実施してもよい。例えば、上述したステップS210以後の処理を、第1の実施形態のステップS110の処理後に実行してもよい。
(第3の実施形態)
以下、第3の実施形態について説明する。ここでは、第1の実施形態との相違点を中心に説明し、第1の実施形態と共通する機能等についての説明は省略する。第1の実施形態では、飛行体20の制御部60は、通信容量に対する通信量検出部72が検出する通信量の割合に応じて、飛行体20の位置を制御するものとした。これに対して、第3の実施形態では、制御部60は、携帯端末装置15の密度が高い領域の上空の位置に、自機を水平方向に移動させる。
図10は、第3の実施形態の通信中継装置50Bの機能構成の一例を示す図である。第3の実施形態の通信中継装置50Bは、第1の実施形態の通信量検出部72に代えて、端末位置情報取得部80を備え、更に領域抽出部82を備える。端末位置情報取得部80は、端末通信アンテナ52と、携帯端末装置15との通信結果に基づいて、端末通信アンテナ52が通信可能な状態にある携帯端末装置15の数を取得する。
更に端末位置情報取得部80は、端末通信アンテナ52と、携帯端末装置15との通信結果に基づいて、携帯端末装置15の位置を検出する。本実施形態では、携帯端末装置15から送信される電波には、例えば、当該携帯端末装置15の位置情報が含まれている。携帯端末装置15は、GPS受信機等の位置特定部を備える。端末位置情報取得部80は、携帯端末装置15から取得した位置情報に基づいて、携帯端末装置15の位置を取得する。
領域抽出部82は、端末位置情報取得部80から携帯端末装置15の位置を示す位置情報を取得する。領域抽出部82は、取得した位置情報に基づいて、自機の周辺の領域における携帯端末装置15の密度を所定の領域ごとに検出する。所定の領域とは、自機の周辺の領域を任意に分割した領域である。領域抽出部82は、自機の周辺の領域のうち携帯端末装置15の密度が高い領域を抽出する。領域抽出部82は、抽出した携帯端末装置15の密度が高い領域を示す情報を位置決定部74に出力する。位置決定部74は、携帯端末装置15の密度が高い領域の上空の位置を、自機を水平方向に移動させる位置として決定する。
図11は、第3の実施形態の制御部60により実行される処理の流れを示すフローチャートである。まず、位置決定部74が、通信量検出部72が検出した通信量を取得する(ステップS300)。次に、位置決定部74は、通信容量に対する通信量の割合を算出する(ステップS302)。通信容量とは、端末通信アンテナ52を介した携帯端末装置15との通信の通信容量又は中継用通信アンテナ54を介した中継回線との通信の通信容量である。
次に、位置決定部74は、ステップS302で算出した通信量が、所定の割合以上であるか否かを判定する(ステップS304)。ステップS302で算出した通信量が、所定の割合以上である場合、位置決定部74は、自機を水平方向に移動させずに、現在の位置を維持すると決定する(ステップS306)。
ステップS302で算出した通信量が、所定の割合未満である場合、端末位置情報取得部80が、携帯端末装置15の位置を取得する(ステップS308)。次に、領域抽出部82が、ステップS308で取得された携帯端末装置15の位置に基づいて、自機の周辺の領域のうち携帯端末装置15の存在する密度が高い領域を抽出する(ステップS310)。次に、位置決定部74が、ステップS310の抽出結果に基づいて、自機を水平方向に移動させる位置を決定する(ステップS312)。次に、移動制御部68が、ステップS306で決定された方向に自機を制御して移動させる。または、移動制御部68が、ステップS312で決定した携帯端末装置15の存在する密度が高い領域の上空の位置に自機を制御して移動させる(ステップS314)。これにより、本フローチャートの1ルーチンは終了する。
また、端末位置情報取得部80は、カメラ26から携帯端末装置15の位置を示す情報を取得してもよい。本実施形態の一例では、端末位置情報取得部80は、カメラ26によって撮像された画像を取得し、取得した情報を領域抽出部82に出力する。領域抽出部82は、カメラ26により撮像された画像に基づいて携帯端末装置15の存在する密度が高い領域を抽出してもよい。例えば、領域抽出部82は、カメラ26により撮像された画像を解析する。領域抽出部82は、解析結果に基づいて抽出された特徴量と、予め記憶領域に記憶された人物モデルに含まれる特徴量とを比較することで、カメラ26により撮像された画像における人の数を検出する。領域抽出部82は、カメラ26により撮像された画像における人の数に基づいて、人の密度が高い領域を抽出する。この場合、領域抽出部82は、人の密度が高い領域を携帯端末装置15の存在する密度の高い領域と推定する。また、飛行体20は、通信量を考慮せずに任意の方向に飛行してみた結果に基づいて、携帯端末装置15が存在する密度が高い領域を検出してもよい。この場合、通信中継装置50Bは、飛行体20が任意の領域を飛行したときに、自装置と接続した携帯端末装置15の数が多い領域の上空に飛行体20を移動させる。
以上説明した第3の実施形態によれば、通信中継装置50Bは、自機の周辺の領域のうち携帯端末装置15の密度が高い領域を抽出し、通信量検出部72が検出する通信量が、通信容量に対して少ない場合には、携帯端末装置15の密度が高い領域の上空の位置に、自機を水平方向に移動させることにより、利用者にとってより利便性が高い通信環境を提供することができる。
(第4の実施形態)
以下、第4の実施形態について説明する。ここでは、第1および第3の実施形態との相違点を中心に説明し、第1および第3の実施形態と共通する機能等についての説明は省略する。第1の実施形態では、飛行体20の制御部60は、通信容量に対する通信量検出部72が検出する通信量の割合に応じて、飛行体20の位置を制御するものとした。これに対して、第4の実施形態では、制御部60は、携帯端末装置15の移動方向を検出し、検出した携帯端末装置15の移動方向に基づいて、自機を水平方向に移動させる。
図12は、第4の実施形態の通信中継装置50Cの機能構成の一例を示す図である。第4の実施形態の通信中継装置50Cは、第1の実施形態の通信量検出部72に代えて端末位置情報取得部80を備え、更に移動方向検出部84を備える。上述したように、携帯端末装置15は、位置特定部により特定された位置情報および自機の識別情報を携帯端末位置情報として通信中継装置50Cに送信する。通信中継装置50Cの端末位置情報取得部80は、所定の時間間隔で、携帯端末装置15から携帯端末装置15の携帯端末位置情報を取得する。端末位置情報取得部80は、携帯端末位置情報を移動方向検出部84に出力する。携帯端末位置情報は、端末位置情報取得部80が携帯端末装置15から取得した携帯端末装置15の位置情報と識別情報とが互いに対応付けられた情報である。
移動方向検出部84は、端末位置情報取得部80から携帯端末位置情報を取得する。移動方向検出部84は、所定間隔ごとに端末位置情報取得部80により取得された携帯端末位置情報に基づいて、携帯端末装置15の位置の時間的な変化を検出する。移動方向検出部84は、検出した携帯端末装置15の位置の時間的な変化に基づいて、携帯端末装置15の移動方向を検出する。位置決定部74は、移動方向検出部84が検出した携帯端末装置15の移動方向に基づいて、自機を水平方向に移動させる方向を決定する。
図13は、第4の実施形態の制御部60により実行される処理の流れを示すフローチャートである。まず、端末位置情報取得部80が、所定の時間間隔で携帯端末装置15の位置を取得する(ステップS400)。次に、移動方向検出部84が、所定の時間間隔で取得した携帯端末装置15の位置に基づいて、携帯端末装置15の移動方向を検出する(ステップS402)。移動方向の検出手法の詳細については後述する。次に、位置決定部74が、ステップS402で検出された携帯端末装置15が移動している複数の移動方向のうち、最も多い移動方向を算出する(ステップS404)。次に、位置決定部74は、ステップS404で算出した移動方向に基づいて、自機を水平方向に移動させる位置を決定する(ステップS406)。次に、移動制御部68は、ステップS406で決定された水平方向の位置に自機を制御して移動させる(ステップS408)。これにより、本フローチャートの1ルーチンは終了する。
図14は、携帯端末装置15の移動方向の検出について説明するための図である。図示する例は、上空から地上を見たときの俯瞰図であり、異なる時刻における通信中継装置50の通信範囲(図中、AおよびA1)を示している。移動方向検出部84は、ある時刻に検出された携帯端末装置15(A)の位置と、ある時刻から所定時間後に検出された携帯端末装置15(A1)の位置とに基づいて、携帯端末装置15の移動方向を示す移動ベクトルVを生成する。移動方向検出部84は、生成した移動ベクトルVの方向を、携帯端末装置15の移動方向として検出する。図示する例では、プラスX方向の移動ベクトルVの数が、マイナスX方向の移動ベクトルの数に比して多い。位置決定部74は、プラスX方向の移動ベクトルを、携帯端末装置15の移動方向のうち、最も多い移動方向であるとして算出する。
位置決定部74は、例えば移動している携帯端末装置15が通信中継装置50の通信範囲内となる位置を決定する。位置決定部74は、例えば移動方向検出部84の検出結果に基づいて、携帯端末装置15の移動速度を算出する。位置決定部74は、算出した携帯端末装置15の移動速度に基づいて、携帯端末装置15が通信中継装置50の通信範囲内となる位置を決定する。例えば、移動している携帯端末装置15が複数存在する場合、位置決定部74は、より多くの携帯端末装置15が通信中継装置50の通信範囲内となる位置を決定する。図示する例では、位置決定部74は、移動方向検出部84の検出結果に基づいて、通信範囲A1となる上空の位置を決定する。これにより、飛行体20は、通信範囲Aとなる上空の位置から、通信範囲A1となる上空の位置に水平方向に移動する。この結果、飛行体20に搭載された通信中継装置50は、より多くの携帯端末装置15との間で通信することができ、より利便性の高い通信環境を利用者に提供することができる。
例えば、コンサート会場や、イベント会場なとの人が多く集まる施設で通信中継装置50が搭載された飛行体20を飛行させると好適である。通信中継装置50は、上述したように携帯端末装置15の移動方向に追従するように飛行体20の位置を決定する。例えば、イベント終了後、携帯端末装置15を所持した人(利用者)がイベント会場から駅に向かって移動する場合がある。この場合、飛行体20は、移動している利用者に追従するため、イベントに参加した利用者に対して、より利便性の高い通信環境を提供することができる。また、展示会などのイベントにおいて、利用者が断続的に駅から展示会の会場に向かって移動、展示会の会場内を移動、または展示会の会場から駅に向かって移動している場合がある。この場合、飛行体20は、携帯端末装置15の移動方向が多い方向に追従するため、利用者に対して、より利便性の高い通信環境を提供することができる。
以上説明した第4の実施形態によれば、通信中継装置50は、移動方向検出部84が検出する携帯端末装置15の移動方向に基づいて、自機を水平方向に移動させることにより、利用者にとってより利便性が高い通信環境を提供することができる。
(第5の実施形態)
以下、第5の実施形態について説明する。ここでは、第1から第4の実施形態との相違点を中心に説明し、第1から第4の実施形態と共通する機能等についての説明は省略する。第1の実施形態では、飛行体20の制御部60は、通信容量に対する通信量検出部72が検出する通信量の割合に応じて、飛行体20の位置を制御するものとした。これに対して、第5の実施形態では、制御部60は、自機の位置を上昇させた後に、通信量が通信容量に対して所定の割合を超えていない場合には、自機を水平方向に移動させる。
第4の実施形態の位置決定部74は、第1から第4の実施形態の位置決定部74の機能に加え、飛行高度を決定する。移動制御部68は、位置決定部74が決定した飛行高度に自機を制御する。端末通信アンテナ52は、飛行体20の飛行高度が高くなる程、通信範囲が広くなる電波を地上に向けて送信する。
図15は、第5の実施形態の制御部60により実行される処理の流れを示すフローチャートである。まず、位置決定部74は、自機の飛行高度を決定する(ステップS500)。次に、移動制御部68は、ステップS500で決定した飛行高度に自機を制御する(ステップS502)。次に、位置決定部74が、通信量検出部72が検出した通信量を取得する(ステップS504)。次に、位置決定部74は、通信容量に対する通信量の割合を算出する(ステップS506)。
次に、位置決定部74は、ステップS504で算出した割合が、所定の割合以上であるか否かを判定する(ステップS508)。ステップS508で算出した割合が、所定の割合未満である場合、位置決定部74は、自機を水平方向に移動させる方向を決定する(ステップS510)。ステップS504で算出した割合が、所定の割合以上である場合、位置決定部74は、自機を水平方向に移動させずに、現在の位置を維持すると決定する(ステップS512)。次に、移動制御部68が、ステップS510で決定された方向に自機を制御して移動させる。または、移動制御部68が、ステップS512で決定したように自機を制御して現在の位置に維持させる(ステップS514)。これにより本フローチャートの1ルーチンは終了する。
以上説明した第5の実施形態によれば、通信中継装置50は、自機の位置を上昇させた後に、通信量が通信容量に対して所定の割合を超えていない場合には、自機を水平方向に移動させることで、携帯端末装置15が存在する領域を探索することができる。この結果、通信中継装置50は、探索した位置で携帯端末装置15と通信することにより、利用者にとってより利便性が高い通信環境を提供することができる。
以上、本発明の実施形態及びその変形を説明したが、これらの実施形態及びその変形は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態及びその変形は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態及びその変形は、発明の範囲や要旨に含まれると同時に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
なお、上述の各装置は内部にコンピュータを有している。そして、上述した各装置の各処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしてもよい。
また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。
さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。