JP6502348B2 - 超音波外科用器具の構成要素を共に結合する方法及び機構 - Google Patents
超音波外科用器具の構成要素を共に結合する方法及び機構 Download PDFInfo
- Publication number
- JP6502348B2 JP6502348B2 JP2016533140A JP2016533140A JP6502348B2 JP 6502348 B2 JP6502348 B2 JP 6502348B2 JP 2016533140 A JP2016533140 A JP 2016533140A JP 2016533140 A JP2016533140 A JP 2016533140A JP 6502348 B2 JP6502348 B2 JP 6502348B2
- Authority
- JP
- Japan
- Prior art keywords
- waveguide
- sheath
- shroud
- torque
- assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 title claims description 74
- 230000008878 coupling Effects 0.000 title description 19
- 238000010168 coupling process Methods 0.000 title description 19
- 238000005859 coupling reaction Methods 0.000 title description 19
- 238000000034 method Methods 0.000 title description 9
- 238000012546 transfer Methods 0.000 claims description 21
- 238000002604 ultrasonography Methods 0.000 claims description 8
- 230000004044 response Effects 0.000 claims description 4
- 230000033001 locomotion Effects 0.000 description 35
- 230000014759 maintenance of location Effects 0.000 description 20
- 238000001356 surgical procedure Methods 0.000 description 14
- 238000005516 engineering process Methods 0.000 description 11
- 239000000463 material Substances 0.000 description 9
- 230000003213 activating effect Effects 0.000 description 7
- 238000002316 cosmetic surgery Methods 0.000 description 5
- 230000001815 facial effect Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000010355 oscillation Effects 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 238000011282 treatment Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 230000001112 coagulating effect Effects 0.000 description 3
- 230000000295 complement effect Effects 0.000 description 3
- 239000012636 effector Substances 0.000 description 3
- 230000015271 coagulation Effects 0.000 description 2
- 238000005345 coagulation Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 230000010358 mechanical oscillation Effects 0.000 description 2
- 102000004169 proteins and genes Human genes 0.000 description 2
- 108090000623 proteins and genes Proteins 0.000 description 2
- 230000008929 regeneration Effects 0.000 description 2
- 238000011069 regeneration method Methods 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 241000894006 Bacteria Species 0.000 description 1
- NHCREQREVZBOCH-UHFFFAOYSA-N CC1C(CCCC2)C2CCC1 Chemical compound CC1C(CCCC2)C2CCC1 NHCREQREVZBOCH-UHFFFAOYSA-N 0.000 description 1
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- 239000004775 Tyvek Substances 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001846 repelling effect Effects 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images




































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
- A61B2017/00402—Piezo electric actuators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320069—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic for ablating tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320098—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with transverse or torsional motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/031—Automatic limiting or abutting means, e.g. for safety torque limiting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0801—Prevention of accidental cutting or pricking
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
Description
図1〜図6は、例示的な超音波外科器具(10)を示す。器具(10)の少なくとも一部は、米国特許第5,322,055号;米国特許第5,873,873号;米国特許第5,980,510号;米国特許第6,325,811号;米国特許第6,773,444号;米国特許第6,783,524号;米国出願公開第2006/0079874号;米国出願公開第2007/0191713号;米国出願公開第2007/0282333号;米国出願公開第2008/0200940号;米国出願公開第2009/0105750号;米国出願公開第2010/0069940号;米国出願公開第2011/0015660号;米国出願公開第2012/0112687号;米国出願公開第2012/0116265号;米国特許出願第13/538,588号;米国特許出願第13/657,553号;米国特許出願第61/410,603号;及び/又は米国特許出願第14/028,717号の教示の少なくとも一部にしたがって構築され操作可能であってもよい。上述の特許、公開公報、及び出願それぞれの開示を、参照により本明細書に組み込む。それらに記載されるように、また以下により詳細に記載するように、器具(10)は、組織の切断と組織(例えば、血管など)の封着又は溶接とを実質的に同時に行うように操作可能である。また、器具(10)は、HARMONIC ACE(登録商標)Ultrasonic Shears、HARMONIC WAVE(登録商標)Ultrasonic Shears、HARMONIC FOCUS(登録商標)Ultrasonic Shears、及び/又はHARMONIC SYNERGY(登録商標)Ultrasonic Bladesとの様々な構造的及び機能的な類似点を有することがあることを理解されたい。更に、器具(10)は、本明細書で引用すると共に参照により本明細書に組み込む、他の参考文献のいずれかに教示されるデバイスとの様々な構造的及び機能的な類似点を有することがある。
器具(10)のいくつかの変形では、トルクレンチ(50)のような別個の構成要素が不要になるように、トルクレンチ(50)のトルク制限機構を器具(10)に組み込むのが望ましいことがある。特に、適切なトルク量が加えられて導波管(20)がトランスデューサアセンブリ(100)と固定されているとき、ユーザーに対してそれを示す一体的な機構を器具(10)に提供するのが望ましいことがある。それに加えて、又はその代わりに、導波管(20)をトランスデューサアセンブリ(100)と固定するのに加えられてもよいトルク量を制限する、一体的な機構を器具(10)に提供するのが望ましいことがある。一体的なトルクアセンブリを含む器具(10)のいくつかの例示的な変形例を、より詳細に後述する。更なる例は、本明細書の教示を考慮して当業者に明白となるであろう。
図7〜図12は、一体的なトルクアセンブリ(250)を有する例示的な器具(200)を示す。本実施例の器具(200)は、以下で考察する違いを除いて、上述した器具(10)と実質的に同様に動作するように構成される。特に、器具(200)はこのように、手術部位の組織を切除及び/又は封着するように操作可能である。本実施例の器具(200)は、トランスデューサアセンブリ(100)とシャフトアセンブリ(210)とを備える。シャフトアセンブリ(210)は、導波管(220)と、シース(230)と、一対の囲い板半片(240、242)と、一対の保定リング(244、246)と、トルク部材(250)と、コネクタ(260)とを備える。シャフトアセンブリ(210)はまた、トランスデューサアセンブリ(100)を選択的に起動させ、それによって導波管(220)の超音波ブレード(224)を選択的に起動させるように操作可能なユーザー入力機構(211)を含む。ユーザー入力機構(211)は、1つ又は2つ以上のスイッチ及び/又は他の様々な構成要素を含んでもよい。単なる例として、ユーザー入力機構(211)は、その開示を参照により本明細書に組み込む、2010年3月18日公開の「Ultrasonic Device for Fingertip Control」という名称の米国出願公開第2010/0069940号の教示の少なくとも一部にしたがって構築され操作可能であってもよい。別の単なる具体例として、ユーザー入力機構(211)は、その開示を参照により本明細書に組み込む、2012年8月9日公開の「Activation Feature for Surgical Instrument with Pencil Grip」という名称の米国出願公開第2012/0203213号の教示の少なくとも一部にしたがって構築され操作可能であってもよい。ユーザー入力機構が構築され操作可能であってもよい更に他の好適な方法は、本明細書の教示を考慮して当業者には明白となるであろう。
図13〜図17Cは、上述した器具(200)のトルクアセンブリ(250)、シース(230)、及びコネクタ(260)を組み込んだ、別の例示的な器具(300)を示す。本実施例の器具(300)は、以下で考察する違いを除いて、上述した器具(10、200)と実質的に同様に動作するように構成される。したがって、器具(300)は、手術部位で組織を切除及び/又は封着するように操作可能である。更に、トルク部材(250)は、器具(200)に関して上述したのと実質的に同様に、器具(300)内で動作するように構成される。特に、トルク部材(250)は、導波管(320)をトランスデューサアセンブリ(100)と結合するために加えられてもよいトルク量を制限し、適切なトルク量が達成されていることを示す、可聴/触覚フィードバックを提供するように構成される。本実施例の器具(300)は、トランスデューサアセンブリ(100)とシャフトアセンブリ(310)とを備える。シャフトアセンブリ(310)は、導波管(320)と、シース(230)と、一対の囲い板半片(340、342)と、保定リング(344)と、保定スリーブ(346)と、トルク部材(250)と、コネクタ(260)と、保定部材(360)と、ばね(370)とを備える。シャフトアセンブリ(310)はまた、トランスデューサアセンブリ(100)を選択的に起動させ、それによって導波管(320)の超音波ブレード(324)を選択的に起動させるように操作可能なユーザー入力機構(311)を含む。ユーザー入力機構(311)は、器具(200)のユーザー入力機構(211)に関する本明細書の教示にしたがって構築され操作可能であってもよい。
図18〜図22Cは、一体的なトルクアセンブリ(450)を有する別の例示的な器具(400)を示す。本実施例の器具(400)は、以下で考察する違いを除いて、上述した器具(10、200、300)と実質的に同様に動作するように構成される。したがって、器具(400)は、手術部位で組織を切除及び/又は封着するように操作可能である。シャフトアセンブリ(450)は、以下で考察する違いを除いて、上述したシャフトアセンブリ(250、350)と実質的に同様に操作されるように構成されている。特に、トルクアセンブリ(450)は、導波管(420)をトランスデューサアセンブリ(100)と結合するのに加えられてもよいトルク量を制限し、適切なトルク量が達成されていることを示す、可聴/触覚フィードバックを提供するように構成される。
図23〜図27Cは、一体的なトルクアセンブリ(550)を有する別の例示的な器具(500)を示す。本実施例の器具(500)は、以下で考察する違いを除いて、上述した器具(10、200、300、400)と実質的に同様に動作するように構成される。したがって、器具(500)は、手術部位で組織を切除及び/又は封着するように操作可能である。更に、トルクアセンブリ(550)は、以下で考察する違いを除いて、上述したトルク部材(250、350)及びトルクアセンブリ(450)を含めたトルクアセンブリと実質的に同様に動作するように構成される。特に、トルクアセンブリ(550)は、導波管(520)をトランスデューサアセンブリ(100)と結合するのに加えられてもよいトルク量を制限し、適切なトルク量が達成されていることを示す、可聴/触覚フィードバックを提供するように構成される。
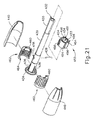
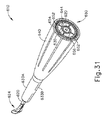
図28〜図31は、一体的なトルクアセンブリ(650)を有する別の例示の器具(600)を示す。本実施例の器具(600)は、以下で考察する違いを除いて、上述した器具(10、200、300、400、500)と実質的に同様に動作するように構成される。したがって、器具(600)は、手術部位で組織を切除及び/又は封着するように操作可能である。更に、トルクアセンブリ(650)は、トルク部材(250、350)を含んでいたトルクアセンブリ、及び以下で考察する違いを除いて上述したトルクアセンブリ(450、550)と実質的に同様に動作するように構成される。特に、トルクアセンブリ(650)は、導波管(620)をトランスデューサアセンブリ(100)と結合するのに加えられてもよいトルク量を制限し、適切なトルク量が達成されていることを示す、可聴/触覚フィードバックを提供するように構成される。
図32〜図36は、一体的なトルクアセンブリを有する別の例示の器具(700)を示す。本実施例の器具(700)は、以下で考察する違いを除いて、上述した器具(10、200、300、400、500、600)と実質的に同様に動作するように構成される。特に、器具(700)は、手術部位で組織を切除及び/又は封着するように操作可能である。更に、後述するトルクアセンブリは、トルク部材(250、350)を含んだトルクアセンブリ、及び後述する違いを除いた上述のトルクアセンブリ(450、550、650)と実質的に同様に動作するように構成される。特に、後述するトルクアセンブリは、導波管(720)をトランスデューサアセンブリ(100)と結合するのに加えられてもよいトルク量を制限し、適切なトルク量が達成されていることを示す、可聴/触覚フィードバックを提供するように構成される。
本明細書に記載する器具のいずれの変形も、上述した特徴に加えて、又はそれらの代わりに、他の様々な特徴を含んでもよいことを理解されたい。単なる例として、本明細書に記載する器具のいずれかが、参照により本明細書に組み込む様々な参考文献のいずれかに開示されている様々な特徴の1つ又は2つ以上を含んでもよい。また、本明細書の教示は、本明細書に列挙する他の参考文献のいずれかに記載されている器具のいずれかに容易に適用することができるので、本明細書の教示は、本明細書に列挙する参考文献のいずれかの教示と容易に組み合わせることができることを理解されたい。本明細書の教示が組み込まれてもよい他の種類の器具は、当業者には明白となるであろう。
(1) 組織を手術するための装置であって、
(a)電力を超音波振動に変換するように操作可能なトランスデューサアセンブリと、
(b)シャフトアセンブリであって、前記シャフトアセンブリが、
(i)前記トランスデューサアセンブリと結合するように構成されている超音波導波管、
(ii)前記導波管が中に配設されているシース、
(iii)前記シースが中を通って延在する囲い板、及び、
(iv)前記囲い板内に収容されたトルク伝達アセンブリであって、前記トルク伝達アセンブリは所定範囲のトルクを前記囲い板から前記導波管に伝達することによって前記導波管を前記トランスデューサアセンブリと結合するように構成されており、前記トルク伝達アセンブリは前記所定範囲の上限を超えてトルクが前記囲い板から前記導波管に伝達されるのを防ぐように更に構成されている、トルク伝達アセンブリ、
を備える、シャフトアセンブリと、を備える、装置。
(2) 前記トルク伝達アセンブリは、第1の位置に向かって弾性的に付勢された弾性部材を備え、前記弾性部材は、前記弾性部材が前記第1の位置にあるときにトルクを前記囲い板から前記導波管に伝達するように構成されている、実施態様1に記載の装置。
(3) 前記囲い板は、前記トルクが前記所定範囲の上限を超えたのに応じて、前記弾性部材を第2の位置へと駆動するように操作可能である、実施態様2に記載の装置。
(4) 前記弾性部材は、前記弾性部材が前記第2の位置にあるときにトルクを前記囲い板から前記導波管に伝達することができない、実施態様3に記載の装置。
(5) 前記シースが前記導波管に固定されており、前記トルク伝達アセンブリは、前記シースを介して前記所定範囲のトルクを前記囲い板から前記導波管に伝達するように構成されている、実施態様1に記載の装置。
(7) 前記つめ機構は、前記トルクが前記所定範囲の上限を超えたのに応じて、前記突起から離れる方向に偏向するように構成されている、実施態様6に記載の装置。
(8) 前記固定の突起は前記シースと一体である、実施態様6に記載の装置。
(9) 前記固定の突起は前記囲い板と一体である、実施態様6に記載の装置。
(10) 前記トルク伝達アセンブリは前記シースの周りに配設された環状部材を備え、前記環状部材は前記囲い板内に収容されており、前記弾性のつめは前記環状部材と一体である、実施態様6に記載の装置。
(12) 前記シャフトアセンブリは弾性部材を更に備え、前記弾性部材は前記囲い板及び前記シースを相対する方向に付勢するように構成されている、実施態様1に記載の装置。
(13) 前記弾性部材は、前記シース及び前記導波管を前記囲い板に対して近位方向に付勢するように構成されている、実施態様12に記載の装置。
(14) 前記囲い板から近位方向に突出する係止シリンダを更に備える、実施態様1に記載の装置。
(15) 前記係止シリンダは、差込み式の取付け具によって前記トランスデューサアセンブリと結合するように構成されている、実施態様14に記載の装置。
(17) 前記超音波導波管が超音波ブレードを備える、実施態様1に記載の装置。
(18) 組織を手術するための装置であって、
(a)電力を超音波振動に変換するように操作可能なトランスデューサアセンブリと、
(b)シャフトアセンブリであって、前記シャフトアセンブリが、
(i)前記トランスデューサアセンブリと結合するように構成されている超音波導波管、
(ii)囲い板であって、前記導波管の少なくとも一部が前記囲い板から遠位方向に延在する、囲い板、及び、
(iii)前記囲い板内に収容されたトルク伝達アセンブリであって、前記トルク伝達アセンブリは、トルクを前記囲い板から前記導波管に伝達することによって、前記囲い板を第1の運動範囲にわたり回転させると前記導波管を前記トランスデューサアセンブリと結合するように構成されており、前記トルク伝達アセンブリは、前記囲い板を第2の運動範囲にわたり回転させると前記囲い板から前記導波管への前記トルクの伝達を防ぐように構成されている、トルク伝達アセンブリ、
を備える、シャフトアセンブリと、を備える、装置。
(19) 前記トルク伝達アセンブリは、前記第1の運動範囲から前記第2の運動範囲への移行が所定のトルク閾値と関連付けられるように構成されている、実施態様18に記載の装置。
(20) 外科用キットであって、
(a)電力を超音波振動に変換するように操作可能なトランスデューサアセンブリと、
(b)前記トランスデューサアセンブリと結合するように構成されており、ブレードを形成する遠位端を有する、超音波導波管と、
(c)前記ブレード上に除去可能に配設されたキャップと、
(d)前記導波管の回転を駆動することによって前記導波管を前記トランスデューサアセンブリと結合するように操作可能なトルクレンチであって、
(i)前記導波管を前記トランスデューサアセンブリと結合することができるトルク量を制限するように操作可能なトルク制限機構、及び、
(ii)前記キャップを係合し、それによって前記キャップを前記ブレードから除去するように操作可能なキャップ係合機構、
を備える、トルクレンチと、を備える、外科用キット。
Claims (17)
- 組織を手術するための装置であって、
(a)電力を超音波振動に変換するように操作可能なトランスデューサアセンブリと、
(b)シャフトアセンブリであって、前記シャフトアセンブリが、
(i)前記トランスデューサアセンブリと結合するように構成されている超音波導波管、
(ii)前記導波管が中に配設されているシースであって、前記シースの開口部と位置合わせされた前記導波管の開口部とにピンが通され、これによって前記シースと前記導波管とが結合されて前記シースの回転によって前記導波管が同時に回転するようになっている、シース、
(iii)前記シースが中を通って延在する囲い板、及び、
(iv)前記囲い板内に収容されたトルク伝達アセンブリであって、前記トルク伝達アセンブリは所定範囲のトルクを前記囲い板から前記導波管に伝達することによって前記導波管を前記トランスデューサアセンブリと結合するように構成されており、前記トルク伝達アセンブリは前記所定範囲の上限を超えてトルクが前記囲い板から前記導波管に伝達されるのを防ぐように更に構成されている、トルク伝達アセンブリ、
を備える、シャフトアセンブリと、を備える、装置。 - 前記トルク伝達アセンブリは、第1の位置に向かって弾性的に付勢された弾性部材を備え、前記弾性部材は、前記弾性部材が前記第1の位置にあるときにトルクを前記囲い板から前記導波管に伝達するように構成されている、請求項1に記載の装置。
- 前記囲い板は、前記トルクが前記所定範囲の上限を超えたのに応じて、前記弾性部材を第2の位置へと駆動するように操作可能である、請求項2に記載の装置。
- 前記弾性部材は、前記弾性部材が前記第2の位置にあるときにトルクを前記囲い板から前記導波管に伝達することができない、請求項3に記載の装置。
- 前記シースが前記導波管に固定されており、前記トルク伝達アセンブリは、前記シースを介して前記所定範囲のトルクを前記囲い板から前記導波管に伝達するように構成されている、請求項1に記載の装置。
- 前記トルク伝達アセンブリは弾性的に付勢されたつめ機構を備え、前記シャフトアセンブリは、前記つめ機構を係合するように構成された固定の突起を更に含む、請求項1に記載の装置。
- 前記つめ機構は、前記トルクが前記所定範囲の上限を超えたのに応じて、前記突起から離れる方向に偏向するように構成されている、請求項6に記載の装置。
- 前記固定の突起は前記シースと一体である、請求項6に記載の装置。
- 前記固定の突起は前記囲い板と一体である、請求項6に記載の装置。
- 前記トルク伝達アセンブリは前記シースの周りに配設された環状部材を備え、前記環状部材は前記囲い板内に収容されており、弾性の前記つめ機構は前記環状部材と一体である、請求項6に記載の装置。
- 前記囲い板は、1つ又は2つ以上の保定リングによって前記シースの周り及び前記環状部材の周りで固定された一対の囲い板半片を備える、請求項10に記載の装置。
- 前記シャフトアセンブリは弾性部材を更に備え、前記弾性部材は前記囲い板及び前記シースを相対する方向に付勢するように構成されている、請求項1に記載の装置。
- 前記弾性部材は、前記シース及び前記導波管を前記囲い板に対して近位方向に付勢するように構成されている、請求項12に記載の装置。
- 前記囲い板から近位方向に突出する係止シリンダを更に備える、請求項1に記載の装置。
- 前記係止シリンダは、差込み式の取付け具によって前記トランスデューサアセンブリと結合するように構成されている、請求項14に記載の装置。
- 前記囲い板がスナップ嵌めによって前記シースと結合されている、請求項1に記載の装置。
- 前記超音波導波管が超音波ブレードを備える、請求項1に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/087,352 | 2013-11-22 | ||
| US14/087,352 US10226271B2 (en) | 2013-11-22 | 2013-11-22 | Methods and features for coupling ultrasonic surgical instrument components together |
| PCT/US2014/065630 WO2015077139A1 (en) | 2013-11-22 | 2014-11-14 | Methods and features for coupling ultrasonic surgical instrument components together |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017508482A JP2017508482A (ja) | 2017-03-30 |
| JP6502348B2 true JP6502348B2 (ja) | 2019-04-17 |
Family
ID=52004071
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016533140A Expired - Fee Related JP6502348B2 (ja) | 2013-11-22 | 2014-11-14 | 超音波外科用器具の構成要素を共に結合する方法及び機構 |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US10226271B2 (ja) |
| EP (2) | EP3071127B1 (ja) |
| JP (1) | JP6502348B2 (ja) |
| CN (1) | CN106163430B (ja) |
| BR (1) | BR112016011466B1 (ja) |
| MX (1) | MX2016006638A (ja) |
| WO (1) | WO2015077139A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD947124S1 (en) | 2020-02-18 | 2022-03-29 | SMTP Medical Co., Ltd. | Transducer |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD776276S1 (en) | 2013-11-22 | 2017-01-10 | Ethicon Endo-Surgery, Llc | End effector assembly for ultrasonic surgical instrument |
| US10226271B2 (en) | 2013-11-22 | 2019-03-12 | Ethicon Llc | Methods and features for coupling ultrasonic surgical instrument components together |
| US9839425B2 (en) | 2014-06-26 | 2017-12-12 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| US10881408B2 (en) * | 2015-04-22 | 2021-01-05 | Covidien Lp | Interlock assembly for replaceable loading units |
| US10321930B2 (en) | 2015-08-24 | 2019-06-18 | Ethicon Llc | Activation features for ultrasonic surgical instrument |
| US10426506B2 (en) * | 2015-08-26 | 2019-10-01 | Ethicon Llc | Ultrasonic surgical instrument with multi-grip activation and power selection |
| US10413314B2 (en) | 2015-08-26 | 2019-09-17 | Ethicon Llc | Ultrasonic surgical instrument with activation member pair and slidable cover |
| US10258361B2 (en) * | 2015-08-26 | 2019-04-16 | Ethicon Llc | Ultrasonic surgical instrument with slidable flexing activation member |
| US10238413B2 (en) | 2015-12-16 | 2019-03-26 | Ethicon Llc | Surgical instrument with multi-function button |
| CN105943124A (zh) * | 2016-06-23 | 2016-09-21 | 山东威瑞外科医用制品有限公司 | 带有换能器快速连接装置的超声刀 |
| US10426951B2 (en) * | 2016-08-19 | 2019-10-01 | Pacesetter, Inc. | Medical tool employing a warning mechanism notifying that a rotational limit has been reached |
| CN107789035A (zh) * | 2016-08-31 | 2018-03-13 | 北京速迈医疗科技有限公司 | 用于超声刀的扭力机构 |
| US10792115B2 (en) | 2016-10-14 | 2020-10-06 | Intuitive Surgical Operations, Inc. | Surgical instrument steering input device |
| US10660722B2 (en) * | 2016-12-14 | 2020-05-26 | Ethicon Llc | Ultrasonic surgical instrument with integral shaft assembly torque wrench |
| US10603129B2 (en) * | 2016-12-14 | 2020-03-31 | Ethicon Llc | Ultrasonic surgical instrument with integral torque wrench and longitudinal engagement |
| US10575917B2 (en) * | 2016-12-14 | 2020-03-03 | Ethicon Llc | Ultrasonic surgical instrument with integral torque wrench and transverse engagement |
| USD950059S1 (en) * | 2017-03-31 | 2022-04-26 | Ernesto A. Lee | Subperiosteal surgical instrument |
| US10709470B2 (en) | 2017-07-10 | 2020-07-14 | Ethicon Llc | Features to couple acoustic drivetrain components in ultrasonic surgical instrument |
| US10813662B2 (en) | 2017-07-10 | 2020-10-27 | Ethicon Llc | Acoustic drivetrain with external collar at nodal position |
| US10758236B2 (en) * | 2017-09-27 | 2020-09-01 | Ethicon Llc | Circular stapling instrument with torque limiting feature |
| CA3126894A1 (en) * | 2019-01-15 | 2020-07-23 | Stryker European Operations Limited | Ultrasonic surgical irrigation sleeve and related assemblies |
| WO2020152783A1 (ja) * | 2019-01-22 | 2020-07-30 | オリンパス株式会社 | 超音波処置具および振動伝達部材 |
| CN209808472U (zh) * | 2019-01-29 | 2019-12-20 | 杭州瑞克斯医疗器械有限公司 | 一种超声切割止血刀系统 |
| CN110115599B (zh) * | 2019-05-16 | 2021-09-24 | 声索生物科技(上海)有限公司 | 鞘管组件、超声探头及其组装方法 |
| WO2021234794A1 (ja) * | 2020-05-18 | 2021-11-25 | オリンパス株式会社 | 被覆部材及び処置具 |
| USD974558S1 (en) | 2020-12-18 | 2023-01-03 | Stryker European Operations Limited | Ultrasonic knife |
| WO2023016704A1 (en) | 2021-08-11 | 2023-02-16 | Biotronik Se & Co. Kg | Device for applying a rotary force having a predefinable maximum torque |
| US11862884B2 (en) | 2021-08-16 | 2024-01-02 | Covidien Lp | Surgical instrument with electrical connection |
Family Cites Families (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4188952A (en) | 1973-12-28 | 1980-02-19 | Loschilov Vladimir I | Surgical instrument for ultrasonic separation of biological tissue |
| US4274826A (en) | 1979-10-18 | 1981-06-23 | Huey Elbert P | Denture adjustment tool |
| JPS625137Y2 (ja) | 1979-11-20 | 1987-02-05 | ||
| USD285835S (en) | 1984-02-06 | 1986-09-23 | Hanses Ulf M | Tooth elevator for use in extractions |
| USD318116S (en) | 1988-02-08 | 1991-07-09 | Michelson Gary K | Surgical elevator |
| US4998350A (en) * | 1989-12-05 | 1991-03-12 | Thompson Lynn C | Knife and sheath |
| US5059210A (en) | 1989-12-12 | 1991-10-22 | Ultracision Inc. | Apparatus and methods for attaching and detaching an ultrasonic actuated blade/coupler and an acoustical mount therefor |
| US5057119A (en) | 1989-12-12 | 1991-10-15 | Ultracision Inc. | Apparatus and methods for attaching and detaching an ultrasonic actuated blade/coupler and an acoustical mount therefor |
| USD344799S (en) | 1991-06-11 | 1994-03-01 | Advanced Osseous Technologies, Inc. | Ultrasonic cutting tool for medical use |
| USD340981S (en) | 1991-06-11 | 1993-11-02 | Advanced Osseous Technologies, Inc. | Ultrasonic cutting tool for medical use |
| US5261922A (en) | 1992-02-20 | 1993-11-16 | Hood Larry L | Improved ultrasonic knife |
| US5322055B1 (en) | 1993-01-27 | 1997-10-14 | Ultracision Inc | Clamp coagulator/cutting system for ultrasonic surgical instruments |
| US5466020A (en) | 1994-12-30 | 1995-11-14 | Valleylab Inc. | Bayonet connector for surgical handpiece |
| US6036667A (en) | 1996-10-04 | 2000-03-14 | United States Surgical Corporation | Ultrasonic dissection and coagulation system |
| EP1946708B1 (en) | 1996-10-04 | 2011-06-22 | Tyco Healthcare Group LP | Instrument for cutting tissue |
| US5776155A (en) * | 1996-12-23 | 1998-07-07 | Ethicon Endo-Surgery, Inc. | Methods and devices for attaching and detaching transmission components |
| US5810859A (en) | 1997-02-28 | 1998-09-22 | Ethicon Endo-Surgery, Inc. | Apparatus for applying torque to an ultrasonic transmission component |
| US6024750A (en) | 1997-08-14 | 2000-02-15 | United States Surgical | Ultrasonic curved blade |
| US5980510A (en) | 1997-10-10 | 1999-11-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp arm pivot mount |
| US5873873A (en) | 1997-10-10 | 1999-02-23 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp mechanism |
| US5993477A (en) * | 1998-06-25 | 1999-11-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic bone anchor |
| USD443058S1 (en) | 1999-09-17 | 2001-05-29 | Genzyme Corporation | Curved medical device for the application of a tack to the body of a patient |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6352532B1 (en) * | 1999-12-14 | 2002-03-05 | Ethicon Endo-Surgery, Inc. | Active load control of ultrasonic surgical instruments |
| US6716028B2 (en) | 2000-08-04 | 2004-04-06 | Hu-Friedy Mfg. Co., Inc. | Ultrasonic swivel insert |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US6811399B2 (en) | 2001-07-27 | 2004-11-02 | Hu-Friedy Mfg. Co., Inc. | Torque lock for ultrasonic swivelable inserts and method |
| AU2002362750B2 (en) * | 2001-10-05 | 2008-07-10 | Covidien Lp | Surgical stapling device |
| DE20118699U1 (de) | 2001-11-19 | 2003-04-03 | Soering Gmbh | Konverteraufnahme für chirurgische Instrumente |
| EP1802245B8 (en) | 2004-10-08 | 2016-09-28 | Ethicon Endo-Surgery, LLC | Ultrasonic surgical instrument |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US8574252B2 (en) | 2006-06-01 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Ultrasonic blade support |
| USD575396S1 (en) | 2006-06-06 | 2008-08-19 | Jung Wu | Endoscopic facelift elevator |
| US7604479B2 (en) | 2006-07-26 | 2009-10-20 | Buchanan L Stephen | Tip wrench for ultrasonic dental tool |
| US7708758B2 (en) * | 2006-08-16 | 2010-05-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| BRPI0806674A2 (pt) * | 2007-01-16 | 2014-05-13 | Ethicon Endo Surgery Inc | Dispositivo ultrassônico para corte e coagulação |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| CN101883531B (zh) | 2007-10-05 | 2014-07-02 | 伊西康内外科公司 | 人体工程学外科手术器械 |
| US9107688B2 (en) | 2008-09-12 | 2015-08-18 | Ethicon Endo-Surgery, Inc. | Activation feature for surgical instrument with pencil grip |
| EP2361042B1 (en) | 2008-09-12 | 2016-11-30 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for fingertip control |
| US8461744B2 (en) | 2009-07-15 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Rotating transducer mount for ultrasonic surgical instruments |
| EP2462890B1 (en) * | 2009-08-05 | 2020-03-25 | Olympus Corporation | Torque wrench and ultrasonic surgery device |
| US8986302B2 (en) | 2009-10-09 | 2015-03-24 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| US9039720B2 (en) * | 2010-11-05 | 2015-05-26 | Ethicon Endo-Surgery, Inc. | Surgical instrument with ratcheting rotatable shaft |
| US9381058B2 (en) | 2010-11-05 | 2016-07-05 | Ethicon Endo-Surgery, Llc | Recharge system for medical devices |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| USD658285S1 (en) | 2011-07-29 | 2012-04-24 | Greatbatch Ltd. | Femoral neck elevator |
| US20130085419A1 (en) | 2011-09-29 | 2013-04-04 | Tyco Healthcare Group Lp | Transducer/Waveguide Engagement Mechanisms for Ultrasonic Surgical Instruments |
| US8845541B2 (en) | 2011-10-14 | 2014-09-30 | Cybersonics, Inc. | Ultrasonic medical device with torque limiting frangible link hinge |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| USD700331S1 (en) | 2012-10-11 | 2014-02-25 | Dental Usa, Inc. | Dental screw tip elector |
| US9241732B2 (en) | 2012-10-16 | 2016-01-26 | Covdien LP | Surgical instrument |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| US9848900B2 (en) | 2012-12-07 | 2017-12-26 | Ethicon Llc | Ultrasonic surgical blade |
| USD715437S1 (en) | 2013-03-15 | 2014-10-14 | Ti Scrubs Llc | Extraction tool |
| USD733300S1 (en) | 2013-07-17 | 2015-06-30 | John R. Bennett | Tonsil cleaning device |
| US10172636B2 (en) | 2013-09-17 | 2019-01-08 | Ethicon Llc | Articulation features for ultrasonic surgical instrument |
| USD776276S1 (en) | 2013-11-22 | 2017-01-10 | Ethicon Endo-Surgery, Llc | End effector assembly for ultrasonic surgical instrument |
| US10226271B2 (en) | 2013-11-22 | 2019-03-12 | Ethicon Llc | Methods and features for coupling ultrasonic surgical instrument components together |
| USD749730S1 (en) | 2013-11-26 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Blade for ultrasonic surgical instrument |
| USD742007S1 (en) | 2014-06-04 | 2015-10-27 | Eric J. Schuetz | Angled elevator |
-
2013
- 2013-11-22 US US14/087,352 patent/US10226271B2/en active Active
-
2014
- 2014-11-14 WO PCT/US2014/065630 patent/WO2015077139A1/en active Application Filing
- 2014-11-14 EP EP14806508.9A patent/EP3071127B1/en active Active
- 2014-11-14 MX MX2016006638A patent/MX2016006638A/es unknown
- 2014-11-14 BR BR112016011466-3A patent/BR112016011466B1/pt active IP Right Grant
- 2014-11-14 EP EP23214254.7A patent/EP4360569A2/en active Pending
- 2014-11-14 CN CN201480063722.XA patent/CN106163430B/zh active Active
- 2014-11-14 JP JP2016533140A patent/JP6502348B2/ja not_active Expired - Fee Related
-
2019
- 2019-01-16 US US16/248,831 patent/US11272950B2/en active Active
-
2022
- 2022-02-16 US US17/673,219 patent/US20220240971A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD947124S1 (en) | 2020-02-18 | 2022-03-29 | SMTP Medical Co., Ltd. | Transducer |
Also Published As
| Publication number | Publication date |
|---|---|
| US11272950B2 (en) | 2022-03-15 |
| US20220240971A1 (en) | 2022-08-04 |
| US20190216490A1 (en) | 2019-07-18 |
| MX2016006638A (es) | 2017-04-27 |
| US10226271B2 (en) | 2019-03-12 |
| CN106163430A (zh) | 2016-11-23 |
| CN106163430B (zh) | 2020-01-17 |
| US20150148829A1 (en) | 2015-05-28 |
| EP3071127B1 (en) | 2023-12-06 |
| EP3071127A1 (en) | 2016-09-28 |
| BR112016011466B1 (pt) | 2022-09-13 |
| EP3071127C0 (en) | 2023-12-06 |
| EP4360569A2 (en) | 2024-05-01 |
| BR112016011466A2 (ja) | 2017-08-08 |
| WO2015077139A1 (en) | 2015-05-28 |
| JP2017508482A (ja) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6502348B2 (ja) | 超音波外科用器具の構成要素を共に結合する方法及び機構 | |
| JP6144026B2 (ja) | 外科用器具内のスリップリングアセンブリと超音波トランスデューサとの結合 | |
| US11925335B2 (en) | Surgical instrument with slip ring assembly to power ultrasonic transducer | |
| US11883057B2 (en) | Ultrasonic surgical instrument with transducer slip joint | |
| JP5972892B2 (ja) | 超音波トランスデューサに電力供給するスリップリングアセンブリを備える外科用器具 | |
| US11020200B2 (en) | Surgical instrument with dual mode end effector and compound lever with detents | |
| US9039720B2 (en) | Surgical instrument with ratcheting rotatable shaft | |
| JP5951622B2 (ja) | 弾力的に付勢された、ハンドピースへの連結具を備える、外科用器具シャフト | |
| EP2854666B1 (en) | Surgical instrument with attachment assembly for surgical instrument end effector | |
| US9763690B2 (en) | Surgical instrument with transducer carrier assembly | |
| BR112018070282B1 (pt) | Aparelho para operar em tecido com acionamento de articulação motorizado no botão de rotação do eixo de acionamento | |
| JP6695872B2 (ja) | 超音波手術器具の作動機構部 | |
| JP2018514268A (ja) | 複数のロック位置を有する回転可能なシャフトを備えた手術器具 | |
| BR112017012955B1 (pt) | Aparelho para operar em tecido | |
| KR102571285B1 (ko) | 일체형 샤프트 조립체 토크 렌치를 갖는 초음파 수술 기구 | |
| JP2004049554A (ja) | 超音波処置具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180814 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20181114 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190320 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6502348 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |