JP6495297B2 - 超音波外科用器具の連結特徴部 - Google Patents
超音波外科用器具の連結特徴部 Download PDFInfo
- Publication number
- JP6495297B2 JP6495297B2 JP2016542900A JP2016542900A JP6495297B2 JP 6495297 B2 JP6495297 B2 JP 6495297B2 JP 2016542900 A JP2016542900 A JP 2016542900A JP 2016542900 A JP2016542900 A JP 2016542900A JP 6495297 B2 JP6495297 B2 JP 6495297B2
- Authority
- JP
- Japan
- Prior art keywords
- assembly
- shaft assembly
- transducer
- motor
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008878 coupling Effects 0.000 claims description 48
- 238000010168 coupling process Methods 0.000 claims description 48
- 238000005859 coupling reaction Methods 0.000 claims description 48
- 230000033001 locomotion Effects 0.000 claims description 34
- 238000001356 surgical procedure Methods 0.000 claims description 6
- 238000013519 translation Methods 0.000 description 49
- 239000012636 effector Substances 0.000 description 33
- 230000007246 mechanism Effects 0.000 description 20
- 238000000034 method Methods 0.000 description 17
- 238000005516 engineering process Methods 0.000 description 11
- 238000005520 cutting process Methods 0.000 description 7
- 230000000295 complement effect Effects 0.000 description 5
- 230000010287 polarization Effects 0.000 description 5
- 230000004913 activation Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 238000004804 winding Methods 0.000 description 4
- 230000005355 Hall effect Effects 0.000 description 3
- 235000014676 Phragmites communis Nutrition 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000010079 rubber tapping Methods 0.000 description 3
- 230000003213 activating effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000001112 coagulating effect Effects 0.000 description 2
- 238000005345 coagulation Methods 0.000 description 2
- 230000015271 coagulation Effects 0.000 description 2
- 238000010348 incorporation Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 102000004169 proteins and genes Human genes 0.000 description 2
- 108090000623 proteins and genes Proteins 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- XUKUURHRXDUEBC-KAYWLYCHSA-N Atorvastatin Chemical compound C=1C=CC=CC=1C1=C(C=2C=CC(F)=CC=2)N(CC[C@@H](O)C[C@@H](O)CC(O)=O)C(C(C)C)=C1C(=O)NC1=CC=CC=C1 XUKUURHRXDUEBC-KAYWLYCHSA-N 0.000 description 1
- 241000894006 Bacteria Species 0.000 description 1
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 1
- 239000004775 Tyvek Substances 0.000 description 1
- 229920000690 Tyvek Polymers 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011443 conventional therapy Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 210000003811 finger Anatomy 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 210000004932 little finger Anatomy 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 241000894007 species Species 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000004659 sterilization and disinfection Methods 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images







































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
- A61B2017/00473—Distal part, e.g. tip or head
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320093—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing cutting operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/031—Automatic limiting or abutting means, e.g. for safety torque limiting
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Mechanical Engineering (AREA)
- Biomedical Technology (AREA)
- Dentistry (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Description
図1は、例示的な超音波外科用器具(10)を示す。器具(10)の少なくとも一部は、下記特許の教示の少なくとも一部に従って構築し、動作することができる:米国特許第5,322,055号、米国特許第5,873,873号、米国特許第5,980,510号、米国特許第6,325,811号、米国特許第6,773,444号、米国特許第6,783,524号、米国公開第2006/0079874号、米国公開第2007/0191713号、米国公開第2007/0282333号、米国公開第2008/0200940号、米国公開第2009/0105750号、米国公開第2010/0069940号、米国公開第2011/0015660号、米国公開第2012/0112687号、米国公開第2012/0116265号、米国特許出願第13/538,588号、米国特許出願第13/657,553号、米国特許出願第61/410,603号、及び/又は米国特許出願第14/028,717号。前述の特許、刊行物、及び出願のそれぞれの開示内容は、参照により本明細書に組み込まれる。その中に記載され、以下により詳細に記載されるように、器具(10)は、実質的に同時に、組織を切断し、組織(例えば、血管など)を封止又は溶接するように動作可能である。また、器具(10)がHARMONIC ACE(登録商標)Ultrasonic Shears、HARMONIC WAVE(登録商標)Ultrasonic Shears、HARMONIC FOCUS(登録商標)Ultrasonic Shears、及び/又はHARMONIC SYNERGY(登録商標)Ultrasonic Bladesとの種々の構造的及び機能的な類似点を有し得ることを理解されたい。更に、器具(10)は、本明細書で引用され参照されることによって本明細書に組み込まれる他の参照文献のいずれかに教示されるデバイスと、種々の構造的かつ機能的類似点を有することがある。
上述したように、導波管(102)は、トランスデューサアセンブリ(12)のねじ付きスタッドによって、トランスデューサアセンブリ(12)と機械的かつ音響的に連結され、ねじ付きスタッドは、導波管(102)の近位端において形成されたねじ付き凹部(103)に螺入される。器具(10)は、シャフトアセンブリ(30)が、ハンドルアセンブリ(20)及びトランスデューサアセンブリ(12)から分離されている状態で、操作者に提供されてもよい。いくつかのこのような変形例では、操作者は、シャフトアセンブリ(30)を片方の手でしっかりと握り、同時に、もう一方の手でトランスデューサアセンブリ(12)をしっかりと握り、次いで、トランスデューサアセンブリ(12)のねじ付きスタッドを導波管(102)のねじ付き凹部(103)内に螺合させるために、シャフトアセンブリ(30)をトランスデューサ(12)に対して回転させる。いくつかのこのような変形例では、トルクレンチを用いて、適切なトルクの量とのこの連結を調整してもよい。
図5〜14Dは、モータ(250)の起動を通して、ハンドルアセンブリ(220)とトランスデューサアセンブリ(12)と選択的に連結するように構成されているシャフトアセンブリ(230)を有する例示的な器具(210)を示す。本例の器具(210)は、以下で論じる相違点を除き、上で論じた器具(10)とほぼ同様に動作するように構成されている。特に、器具(210)は、エンドエフェクタ(240)の枢動するクランプアーム(244)と超音波ブレード(242)との間で組織を掴むように、またブレード(242)を超音波で起動させることにより、組織を切断/封止するように構成されている。
図15〜24Dは、モータ(350)の起動を通して、ハンドルアセンブリ(320)とトランスデューサアセンブリ(12)とに選択的に連結するように構成されているシャフトアセンブリ(330)を有する別の例示的な器具(310)を示す。本例の器具(310)は、以下で論じる相違点を除き、上で論じた器具(10、210)とほぼ同様に動作するように構成されている。特に、器具(310)は、エンドエフェクタ(340)の枢動するクランプアーム(344)と超音波ブレード(342)との間で組織を掴むように、また、ブレード(342)を超音波で起動させることにより、組織を切断/封止するように構成されている。
上で論じた器具(10)のいくつかの変形例において、一体型モータを有するトランスデューサアセンブリ(12)の変形例を提供することが望ましい場合がある。図25〜27は、モータ(450)と超音波トランスデューサ(460)とを同軸関係で一体化する例示的なアセンブリ(420)を示す。アセンブリ(420)は、トランスデューサと導波管との間の電動連結部を提供するために、器具(10)に容易に組み込まれ得る。本例のモータ(450)は、ステータ(452)とロータ(456)とを備える。ステータ(452)は、直径に沿い互いに対向するギャップ(455)(図26ではただ1つのギャップ(455)が示されている)を画定するフランジ(454)を含む。ロータ(456)は、ステータ(452)内に同軸状かつ回転可能に配設されている。いくつかの変形例では、モータ(450)は、ブラシレスモータである。単なる例として、ステータ(452)は、ロータ(456)が、永久磁石の角度方向に間隔を空けたアレイを含むのに対し、選択的に整流される巻線を含んでもよく、これにより、ステータ(452)の巻線が、選択的に整流されると、電磁力は、ロータ(456)がステータ(452)内で回転することを促す。ステータ(452)及びロータ(456)が提供され得る他の好適な構成要素、特徴部、及び構成が、本明細書の教示を考慮することで、当業者に明らかになるであろう。
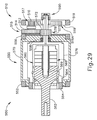
上で論じた器具(10)のいくつかの変形例において、一体型モータを有するトランスデューサアセンブリ(12)の変形例に加えて、ギアアセンブリを提供することが望ましい場合がある。単に例として、ギアアセンブリの付加は、モータのサイズ、電力消費、及びトルクの間の所望のバランスを提供する、選択されたギア比を可能にし得る。ギアアセンブリはまた、ロータとモータのステータとの間の相対的回転を組み合わせてもよい。図28〜37は、モータ(550)を超音波トランスデューサ(560)とギアのセット(510)とに一体化する例示的なアセンブリ(500)を示す。アセンブリ(500)は、トランスデューサと導波管との間の電動連結部を提供するために、器具(10)に既に組み込まれていてもよい。本例のモータ(550)は、ステータ(570)とロータ(576)とを備える。ロータ(576)は、ステータ(570)内に同軸状かつ回転可能に配設されている。いくつかの変形例では、モータ(550)は、ブラシレスモータである。単なる例として、ステータ(570)は、ロータ(576)が、永久磁石の角度方向に間隔を空けたアレイを含むのに対し、選択的に整流される巻線を含んでもよく、これにより、ステータ(570)の巻線が、選択的に整流されると、電磁力は、ロータ(576)がステータ(570)内で回転することを促す。ステータ(570)及びロータ(576)に提供され得る他の好適な構成要素、特徴部、及び構成が、本明細書の教示を考慮することで、当業者に明らかになるであろう。
上述したように、シャフトアセンブリ(30)が、トランスデューサアセンブリ(12)とハンドルアセンブリ(20)とに、比較的容易に、直ぐに連結し、またこれらから容易に分離され得るモジュール方式を提供することが望ましい場合がある。いくつかの例では、シャフトアセンブリ(30)のこのような連結及び分離は、導波管(102)のトランスデューサアセンブリ(12)との連結及び内側管(34)のヨーク(25)の連結アセンブリ(35)との連結を含んでもよい。導波管(102)のこのような連結と、内側管(34)のこのような連結とは、同時に提供することが望ましい場合がある。特に、導波管(102)の連結と、内側管(34)の連結とを、同軸状に配置されかつ径方向に離間されたねじ付き特徴部のセットを通して、同時に提供することが望ましい場合がある。このような特徴部は、導波管(102)の連結と、内側管(34)の連結とを、一回の回転動作で提供し得る。図38〜49Cは、導波管(102)の連結と、内側管(34)の連結とを、一回の回転動作で提供し得る種々の特徴部の例を示す。
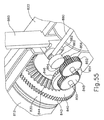
図50〜52は、例示の代替的外科用器具(610)を示す。本例の器具(610)は、以下で論じる相違点を除き、上で論じた器具(10)とほぼ同様に動作するように構成されている。本実施例の器具(610)は、ハンドルアセンブリ(620)と、シャフトアセンブリ(630)と、エンドエフェクタ(640)と、を備えている。シャフトアセンブリ(630)は、外側シース(632)と、外側シース(632))内に摺動可能に配設された内側管(図示せず)と、内側管内に配設された導波管(602)とを備える。上で論じられた器具(10)の内側管(34)と同様に、本例の内側管の長手方向並進運動は、超音波ブレード(642)に向かう、また超音波ブレード(642)から離れるエンドエフェクタ(640)のクランプアーム(644)の作動を引き起こす。ハンドルアセンブリ(620)は、ピストルグリップ(624)を含む本体(622)を備える。ハンドルアセンブリ(620)は、ピストルグリップ(624)に向かうように、またそれから離れるように枢動可能なトリガ(628)もまた含む。トリガ(628)は、ハンドルアセンブリ(620)に枢動可能に連結される。以下により詳細に論じられるように、トリガ(628)の枢動は、内側管(634)の長手方向並進運動を引き起こすことによって、クランプアーム(644)の超音波ブレード(642)に向かう、また超音波ブレード(642)から離れる枢動を引き起こす。
図53A〜53Dは、器具(10)に容易に組み入れることができる例示のシャフトアセンブリ(730)及びトランスデューサアセンブリ(760)を示す。トランスデューサアセンブリ(760)は、超音波トランスジューサ(762)と、弾性シュラウドアセンブリ(764)とを備える。本例のクランプアーム(762)は、以下で論じる相違点を除いて、上で論じた超音波トランスデューサ(12)とほぼ同様に動作するように構成される。例えば、トランスデューサアセンブリ(762)は、圧電原理を通して、電力を超音波振動に変換し、これらの振動を、シャフトアセンブリ(730)を通って延びる音響導波管(702)に沿って伝達し、超音波ブレード(図示せず)に到達させる。シャフトアセンブリ(730)は、外側シース(732)と、外側シース(732)内に摺動可能に配設される内側管(734)と、内側管(734)内に配設された導波管(702)とを備える。上で論じられた器具(10)の内側管(34)と同様に、本例の内側管(734)の長手方向並進運動は、超音波ブレードに向かう、また超音波ブレードから離れるエンドエフェクタ(図示せず)のクランプアーム(図示せず)の作動を引き起こす。
本明細書で説明される器具のいずれの変形例も、上述されるものに加えて、又はそれらの代わりに、種々の他の特徴部を含んでいてもよいことを理解されたい。例示的なものにすぎないが、本明細書で説明される器具のいずれも、参照により本明細書に組み込まれる種々の参照文献のいずれかで開示される種々の特徴部の1つ又は2つ以上を含むこともできる。本明細書の教示は、本明細書の引用文献のいずれかの教示と多数の方法で容易に組み合わせ得るため、本明細書の教示は、本明細書の他の引用文献のいずれかに記載される器具のいずれにも容易に適用され得ることもまた理解されたい。本明細書の教示が組み込まれ得る他の種類の器具が、当業者には明らかであろう。
(1) 組織に手術を施すための装置であって、
(a)本体と、
(b)超音波トランスデューサと、
(c)シャフトアセンブリであって、長手方向軸を画定する、シャフトアセンブリと、
(d)連結アセンブリと、を備え、前記連結アセンブリが、
(i)モータであって、前記本体に対して前記超音波トランスデューサを回転させ、これによって、前記シャフトアセンブリを前記超音波トランスデューサと連結させるように動作可能である、モータと、
(ii)ロック特徴部であって、前記シャフトアセンブリと選択的に係合し、これによって、前記超音波トランスデューサが回転されて前記シャフトアセンブリと連結したときに、前記シャフトアセンブリの前記本体に対する回転を防止するように構成されている、ロック特徴部と、を備える、装置。
(2) 前記ロック特徴部が、少なくとも1つの長手方向スロットを備え、前記シャフトアセンブリが、前記少なくとも1つの長手方向スロット内に配設されるように構成された、少なくとも1つの長手方向突起部を備える、実施態様1に記載の装置。
(3) 前記モータが、前記シャフトアセンブリの長手方向の並進運動を引き起こすように更に動作可能である、実施態様1に記載の装置。
(4) 前記本体が、トリガと回転可能なロック部材とを更に備え、前記トリガが、前記本体に向かって、また前記本体から離れて枢動可能であり、これによって、前記回転可能なロック部材を、前記シャフトアセンブリと選択的に係合させ、また係合解除させる、実施態様1に記載の装置。
(5) 前記シャフトアセンブリが、複数の長手方向スプラインを備える、実施態様1に記載の装置。
(7) 前記連結アセンブリが、第1の可動域及び第2の可動域にわたり枢動するように構成されたレバーアームを備える、実施態様6に記載の装置。
(8) 前記モータが、前記レバーアームの前記第1の可動域の間に前記超音波トランスデューサを回転させるように起動させるよう構成され、前記モータが、前記レバーアームの前記第2の可動域の間に動作を停止させるように構成されている、実施態様7に記載の装置。
(9) 前記レバーアームが、前記第1の可動域を完了後に、前記ロック部材を並進運動させるように動作可能である、実施態様7に記載の装置。
(10) 前記レバーアームが、ケーブルを介して、前記ロック部材と連結されている、実施態様9に記載の装置。
(i)前記トランスデューサの周りに配設されたハウジングと、
(ii)前記ハウジングの周りに配設されたリングギアと、を更に備え、前記モータが、前記リングギアを回転させるように動作可能であり、前記リングギアが、前記ハウジングを回転させ、これによって、前記トランスデューサを回転させるように動作可能であり、前記ハウジングが、前記リングギア内で長手方向に並進運動するように構成されている、実施態様1に記載の装置。
(12) 前記モータが、前記トランスデューサの周りに同軸状に配設されている、実施態様1に記載の装置。
(13) 前記モータが、ロータとステータとを更に備え、前記ロータが、前記トランスデューサに固定され、前記ステータが、前記本体に固定されている、実施態様12に記載の装置。
(14) ギアアセンブリを更に備え、前記モータが、ロータとステータとを備え、前記ギアアセンブリが、前記モータの作動に反応して、前記本体に対する前記ロータの回転と、前記本体に対する前記ステータの回転とを提供するように動作可能である、実施態様12に記載の装置。
(15) 前記ロータが、前記ギアアセンブリを通過するステムを更に含み、前記ステムが、前記超音波トランスデューサに電気的連続性を提供するように構成されたスリップリング特徴部を含む、実施態様14に記載の装置。
(17) 前記モータが、アクスルを回転させるように動作可能であり、前記アクスルが、歯を有するギアを含む、実施態様1に記載の装置。
(18) 組織に手術を施すための装置であって、
(a)本体と、
(b)超音波トランスデューサであって、ねじ付きスタッドを備える、超音波トランスデューサと、
(c)並進運動ドライバであって、前記ねじ付きスタッドの周りに同軸状に配設され、かつねじ切り部を有する、並進運動ドライバと、
(d)シャフトアセンブリと、を備え、前記シャフトアセンブリが、
(i)ねじ孔を有する導波管であって、前記ねじ孔が、前記超音波トランスデューサの前記ねじ付きスタッドを螺着可能に受容するように構成されている、導波管と、
(ii)前記導波管の周りに同軸状に配設された並進運動管状部材と、を備え、前記並進運動管状部材が、前記導波管に対して並進運動可能であり、前記並進運動管状部材が、前記導波管の前記ねじ孔の周りに同軸状に配設された連結部を有し、前記並進運動管状部材の前記連結部が、前記並進運動ドライバの前記ねじ切り部に螺着可能に係合するように構成されている、装置。
(19) 前記導波管を前記ねじ付きスタッドと位置合わせするよう案内するように構成されたバヨネットスロットとピンとを更に備える、実施態様18に記載の装置。
(20) 組織に手術を施すための装置であって、
(a)ハンドルアセンブリであって、グリップを含む、ハンドルアセンブリと、
(b)前記ハンドルアセンブリから遠位に延在しているシャフトアセンブリであって、前記シャフトアセンブリが、長手方向に並進運動可能な部材を備え、前記シャフトが、長手方向軸を画定する、シャフトアセンブリと、
(c)枢動可能なクランプアームを備えるエンドエフェクタであって、前記並進運動可能な部材が、前記ハンドルアセンブリに対して並進運動可能であり、これによって、前記クランプアームの枢動を引き起こす、エンドエフェクタと、
(d)トリガアセンブリと、を備え、前記トリガアセンブリが、
(i)第1のラック部材を有する枢動トリガであって、前記グリップに対して枢動するように動作可能である、枢動トリガと、
(ii)前記第1のラック部材と係合された回転可能な部材と、
(iii)前記回転可能な部材と係合された第2のラック部材であって、前記長手方向に並進運動可能な部材と更に係合される、第2のラック部材と、を備え、
前記第1のラック部材と、前記回転可能な部材と、前記第2のラック部材とが、前記グリップに対する前記トリガの枢動を、前記本体に対する前記長手方向に並進運動可能な部材の並進運動に変換するように構成されている、装置。
Claims (17)
- 組織に手術を施すための装置であって、
(a)本体と、
(b)前記本体内に収容されており、並進運動可能なハウジングと、
(c)超音波トランスデューサと、
(d)前記並進運動可能なハウジングに係合可能なシャフトアセンブリであって、長手方向軸を画定する、シャフトアセンブリと、
(e)連結アセンブリと、を備え、前記連結アセンブリが、
(i)モータであって、前記並進運動可能なハウジングおよび前記並進運動可能なハウジングに係合している前記シャフトアセンブリを前記超音波トランスデューサに向かって駆動させながら、前記本体に対して前記超音波トランスデューサを回転させ、これによって、前記シャフトアセンブリを前記超音波トランスデューサと連結させるように動作可能である、モータと、
(ii)ロック特徴部であって、前記シャフトアセンブリと選択的に係合し、これによって、前記超音波トランスデューサが回転されて前記シャフトアセンブリと連結したときに、前記シャフトアセンブリの前記本体に対する回転を防止するように構成されている、ロック特徴部と、を備える、装置。 - 前記ロック特徴部が、少なくとも1つの長手方向スロットを備え、前記シャフトアセンブリが、前記少なくとも1つの長手方向スロット内に配設されるように構成された、少なくとも1つの長手方向突起部を備える、請求項1に記載の装置。
- 前記モータが、前記シャフトアセンブリの長手方向の並進運動を引き起こすように更に動作可能である、請求項1に記載の装置。
- 前記本体が、トリガと回転可能なロック部材とを更に備え、前記トリガが、前記本体に向かって、また前記本体から離れて枢動可能であり、これによって、前記回転可能なロック部材を、前記シャフトアセンブリと選択的に係合させ、また係合解除させる、請求項1に記載の装置。
- 前記シャフトアセンブリが、複数の長手方向スプラインを備える、請求項1に記載の装置。
- 前記連結アセンブリが、長手方向に並進運動可能なロック部材を備え、前記長手方向に並進運動可能なロック部材が、前記複数の長手方向スプラインのうちの少なくとも1つの長手方向スプラインに係合し、これによって、前記シャフトアセンブリの回転を防止するように構成されている、請求項5に記載の装置。
- 前記連結アセンブリが、第1の可動域及び第2の可動域にわたり枢動するように構成されたレバーアームを備える、請求項6に記載の装置。
- 前記モータが、前記レバーアームの前記第1の可動域の間に前記超音波トランスデューサを回転させるように起動させるよう構成され、前記モータが、前記レバーアームの前記第2の可動域の間に動作を停止させるように構成されている、請求項7に記載の装置。
- 前記レバーアームが、前記第1の可動域を完了後に、前記ロック部材を並進運動させるように動作可能である、請求項7に記載の装置。
- 前記レバーアームが、ケーブルを介して、前記ロック部材と連結されている、請求項9に記載の装置。
- 前記連結アセンブリが、
(i)前記超音波トランスデューサの周りに配設された第2ハウジングと、
(ii)前記第2ハウジングの周りに配設されたリングギアと、を更に備え、前記モータが、前記リングギアを回転させるように動作可能であり、前記リングギアが、前記第2ハウジングを回転させ、これによって、前記超音波トランスデューサを回転させるように動作可能であり、前記第2ハウジングが、前記リングギア内で長手方向に並進運動するように構成されている、請求項1に記載の装置。 - 前記モータが、前記超音波トランスデューサの周りに同軸状に配設されている、請求項1に記載の装置。
- 前記モータが、ロータとステータとを更に備え、前記ロータが、前記超音波トランスデューサに固定され、前記ステータが、前記本体に固定されている、請求項12に記載の装置。
- ギアアセンブリを更に備え、前記モータが、ロータとステータとを備え、前記ギアアセンブリが、前記モータの作動に反応して、前記本体に対する前記ロータの回転と、前記本体に対する前記ステータの回転とを提供するように動作可能である、請求項12に記載の装置。
- 前記ロータが、前記ギアアセンブリを通過するステムを更に含み、前記ステムが、前記超音波トランスデューサに電気的連続性を提供するように構成されたスリップリング特徴部を含む、請求項14に記載の装置。
- 前記モータが、アクスルを回転させるように動作可能であり、前記アクスルが、ねじ部を含む、請求項1に記載の装置。
- 前記モータが、アクスルを回転させるように動作可能であり、前記アクスルが、歯を有するギアを含む、請求項1に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/142,216 US9539020B2 (en) | 2013-12-27 | 2013-12-27 | Coupling features for ultrasonic surgical instrument |
| US14/142,216 | 2013-12-27 | ||
| PCT/US2014/072040 WO2015100285A1 (en) | 2013-12-27 | 2014-12-23 | Coupling features for ultrasonic surgical instrument |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017500157A JP2017500157A (ja) | 2017-01-05 |
| JP6495297B2 true JP6495297B2 (ja) | 2019-04-03 |
Family
ID=52432917
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016542900A Expired - Fee Related JP6495297B2 (ja) | 2013-12-27 | 2014-12-23 | 超音波外科用器具の連結特徴部 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9539020B2 (ja) |
| EP (1) | EP3086722B1 (ja) |
| JP (1) | JP6495297B2 (ja) |
| CN (1) | CN105939679B (ja) |
| BR (1) | BR112016015023B1 (ja) |
| WO (1) | WO2015100285A1 (ja) |
Families Citing this family (198)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US20130317519A1 (en) | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US9668814B2 (en) | 2013-03-07 | 2017-06-06 | Hansen Medical, Inc. | Infinitely rotatable tool with finite rotating drive shafts |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US11213363B2 (en) | 2013-03-14 | 2022-01-04 | Auris Health, Inc. | Catheter tension sensing |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9498601B2 (en) | 2013-03-14 | 2016-11-22 | Hansen Medical, Inc. | Catheter tension sensing |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9452018B2 (en) | 2013-03-15 | 2016-09-27 | Hansen Medical, Inc. | Rotational support for an elongate member |
| US20140276647A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Vascular remote catheter manipulator |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| KR102332023B1 (ko) | 2013-10-24 | 2021-12-01 | 아우리스 헬스, 인크. | 로봇-보조식 내강 내부 수술용 시스템 및 이와 관련된 방법 |
| US9737373B2 (en) * | 2013-10-24 | 2017-08-22 | Auris Surgical Robotics, Inc. | Instrument device manipulator and surgical drape |
| US9724092B2 (en) | 2013-12-23 | 2017-08-08 | Ethicon Llc | Modular surgical instruments |
| US20150173756A1 (en) | 2013-12-23 | 2015-06-25 | Ethicon Endo-Surgery, Inc. | Surgical cutting and stapling methods |
| US9763662B2 (en) | 2013-12-23 | 2017-09-19 | Ethicon Llc | Fastener cartridge comprising a firing member configured to directly engage and eject fasteners from the fastener cartridge |
| US9839428B2 (en) | 2013-12-23 | 2017-12-12 | Ethicon Llc | Surgical cutting and stapling instruments with independent jaw control features |
| US10349967B2 (en) | 2014-02-28 | 2019-07-16 | Ethicon Llc | Ultrasonic surgical instrument with removable handle assembly |
| US10010340B2 (en) * | 2014-02-28 | 2018-07-03 | Ethicon Llc | Ultrasonic surgical instrument with removable handle assembly |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US10569052B2 (en) | 2014-05-15 | 2020-02-25 | Auris Health, Inc. | Anti-buckling mechanisms for catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US10433845B2 (en) | 2015-08-26 | 2019-10-08 | Ethicon Llc | Surgical staple strips for permitting varying staple properties and enabling easy cartridge loading |
| BR112018003693B1 (pt) | 2015-08-26 | 2022-11-22 | Ethicon Llc | Cartucho de grampos cirúrgicos para uso com um instrumento de grampeamento cirúrgico |
| MX2022009705A (es) | 2015-08-26 | 2022-11-07 | Ethicon Llc | Metodo para formar una grapa contra un yunque de un instrumento de engrapado quirurgico. |
| US10251648B2 (en) | 2015-09-02 | 2019-04-09 | Ethicon Llc | Surgical staple cartridge staple drivers with central support features |
| MX2022006192A (es) | 2015-09-02 | 2022-06-16 | Ethicon Llc | Configuraciones de grapas quirurgicas con superficies de leva situadas entre porciones que soportan grapas quirurgicas. |
| WO2017044884A1 (en) * | 2015-09-09 | 2017-03-16 | Auris Surgical Robotics, Inc. | Instrument device manipulator for a surgical robotics system |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10595864B2 (en) * | 2015-11-24 | 2020-03-24 | Covidien Lp | Adapter assembly for interconnecting electromechanical surgical devices and surgical loading units, and surgical systems thereof |
| TWI633869B (zh) * | 2015-12-08 | 2018-09-01 | 天津瑞奇外科器械股份有限公司 | 超音波外科手術器械 |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| USD847989S1 (en) | 2016-06-24 | 2019-05-07 | Ethicon Llc | Surgical fastener cartridge |
| USD850617S1 (en) | 2016-06-24 | 2019-06-04 | Ethicon Llc | Surgical fastener cartridge |
| JP6957532B2 (ja) | 2016-06-24 | 2021-11-02 | エシコン エルエルシーEthicon LLC | ワイヤステープル及び打ち抜き加工ステープルを含むステープルカートリッジ |
| USD826405S1 (en) | 2016-06-24 | 2018-08-21 | Ethicon Llc | Surgical fastener |
| US11000278B2 (en) | 2016-06-24 | 2021-05-11 | Ethicon Llc | Staple cartridge comprising wire staples and stamped staples |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| WO2018044306A1 (en) | 2016-08-31 | 2018-03-08 | Auris Surgical Robotics, Inc. | Length conservative surgical instrument |
| GB2554363B (en) * | 2016-09-21 | 2021-12-08 | Cmr Surgical Ltd | User interface device |
| DE112016007242T5 (de) * | 2016-10-28 | 2019-06-06 | Olympus Corporation | Medizinisches behandlungsgerät und betätigungsverfahren für ein medizinisches behandlungsgerät |
| US11116532B2 (en) * | 2016-11-16 | 2021-09-14 | Cilag Gmbh International | Surgical instrument with selectively actuated gap-setting features for end effector |
| US10646300B2 (en) * | 2016-12-14 | 2020-05-12 | Ethicon Llc | Ultrasonic surgical instrument with transducer locking feature |
| US10603129B2 (en) * | 2016-12-14 | 2020-03-31 | Ethicon Llc | Ultrasonic surgical instrument with integral torque wrench and longitudinal engagement |
| US10660722B2 (en) | 2016-12-14 | 2020-05-26 | Ethicon Llc | Ultrasonic surgical instrument with integral shaft assembly torque wrench |
| US10537324B2 (en) | 2016-12-21 | 2020-01-21 | Ethicon Llc | Stepped staple cartridge with asymmetrical staples |
| US10945727B2 (en) | 2016-12-21 | 2021-03-16 | Ethicon Llc | Staple cartridge with deformable driver retention features |
| US10993715B2 (en) | 2016-12-21 | 2021-05-04 | Ethicon Llc | Staple cartridge comprising staples with different clamping breadths |
| US11684367B2 (en) | 2016-12-21 | 2023-06-27 | Cilag Gmbh International | Stepped assembly having and end-of-life indicator |
| US10687810B2 (en) | 2016-12-21 | 2020-06-23 | Ethicon Llc | Stepped staple cartridge with tissue retention and gap setting features |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| US11058472B2 (en) * | 2017-05-22 | 2021-07-13 | Cilag Gmbh International | Combination ultrasonic and electrosurgical instrument having clamp arm electrode |
| TWI721278B (zh) * | 2017-06-15 | 2021-03-11 | 大陸商天津瑞奇外科器械股份有限公司 | 超聲外科手術器械 |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11602366B2 (en) | 2017-10-30 | 2023-03-14 | Cilag Gmbh International | Surgical suturing instrument configured to manipulate tissue using mechanical and electrical power |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| US11406390B2 (en) | 2017-10-30 | 2022-08-09 | Cilag Gmbh International | Clip applier comprising interchangeable clip reloads |
| KR102462568B1 (ko) | 2017-12-11 | 2022-11-04 | 아우리스 헬스, 인코포레이티드 | 기구 기반 삽입 아키텍처를 위한 시스템 및 방법 |
| KR20200100613A (ko) | 2017-12-14 | 2020-08-26 | 아우리스 헬스, 인코포레이티드 | 기구 위치 추정을 위한 시스템 및 방법 |
| CN211066895U (zh) * | 2017-12-25 | 2020-07-24 | 上海逸思医疗科技有限公司 | 一种套管组件可拆卸的超声手术器械 |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US10943454B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US20190201142A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Automatic tool adjustments for robot-assisted surgical platforms |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US20190201039A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Situational awareness of electrosurgical systems |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US12053159B2 (en) | 2017-12-28 | 2024-08-06 | Cilag Gmbh International | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US20190201027A1 (en) * | 2017-12-28 | 2019-07-04 | Ethicon Llc | Surgical instrument with acoustic-based motor control |
| US10755813B2 (en) | 2017-12-28 | 2020-08-25 | Ethicon Llc | Communication of smoke evacuation system parameters to hub or cloud in smoke evacuation module for interactive surgical platform |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US11273001B2 (en) | 2017-12-28 | 2022-03-15 | Cilag Gmbh International | Surgical hub and modular device response adjustment based on situational awareness |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US11056244B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Automated data scaling, alignment, and organizing based on predefined parameters within surgical networks |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11045591B2 (en) | 2017-12-28 | 2021-06-29 | Cilag Gmbh International | Dual in-series large and small droplet filters |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US20190201042A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Determining the state of an ultrasonic electromechanical system according to frequency shift |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US20190201139A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Communication arrangements for robot-assisted surgical platforms |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11096693B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Adjustment of staple height of at least one row of staples based on the sensed tissue thickness or force in closing |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US10595887B2 (en) | 2017-12-28 | 2020-03-24 | Ethicon Llc | Systems for adjusting end effector parameters based on perioperative information |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US11160605B2 (en) | 2017-12-28 | 2021-11-02 | Cilag Gmbh International | Surgical evacuation sensing and motor control |
| US12062442B2 (en) | 2017-12-28 | 2024-08-13 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11147607B2 (en) | 2017-12-28 | 2021-10-19 | Cilag Gmbh International | Bipolar combination device that automatically adjusts pressure based on energy modality |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11998193B2 (en) | 2017-12-28 | 2024-06-04 | Cilag Gmbh International | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11051876B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Surgical evacuation flow paths |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| WO2019143458A1 (en) | 2018-01-17 | 2019-07-25 | Auris Health, Inc. | Surgical robotics systems with improved robotic arms |
| US11246621B2 (en) * | 2018-01-29 | 2022-02-15 | Covidien Lp | Ultrasonic transducers and ultrasonic surgical instruments including the same |
| US10582944B2 (en) * | 2018-02-23 | 2020-03-10 | Covidien Lp | Ultrasonic surgical instrument with torque assist feature |
| US11337746B2 (en) | 2018-03-08 | 2022-05-24 | Cilag Gmbh International | Smart blade and power pulsing |
| US11534196B2 (en) | 2018-03-08 | 2022-12-27 | Cilag Gmbh International | Using spectroscopy to determine device use state in combo instrument |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11589865B2 (en) | 2018-03-28 | 2023-02-28 | Cilag Gmbh International | Methods for controlling a powered surgical stapler that has separate rotary closure and firing systems |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US11213294B2 (en) | 2018-03-28 | 2022-01-04 | Cilag Gmbh International | Surgical instrument comprising co-operating lockout features |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| CN112384121A (zh) | 2018-06-27 | 2021-02-19 | 奥瑞斯健康公司 | 用于医疗器械的对准系统和附接系统 |
| CN112752534A (zh) | 2018-09-28 | 2021-05-04 | 奥瑞斯健康公司 | 用于手动和机器人驱动医疗器械的装置、系统和方法 |
| WO2020131304A1 (en) * | 2018-12-17 | 2020-06-25 | Covidien Lp | Robotic surgical systems having robotic arm assemblies |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11517309B2 (en) | 2019-02-19 | 2022-12-06 | Cilag Gmbh International | Staple cartridge retainer with retractable authentication key |
| US11464511B2 (en) | 2019-02-19 | 2022-10-11 | Cilag Gmbh International | Surgical staple cartridges with movable authentication key arrangements |
| US11638618B2 (en) | 2019-03-22 | 2023-05-02 | Auris Health, Inc. | Systems and methods for aligning inputs on medical instruments |
| CN110403672B (zh) * | 2019-05-01 | 2024-04-19 | 杭州康基医疗器械有限公司 | 超声医疗外科器械 |
| CN110123416B (zh) * | 2019-05-01 | 2024-05-07 | 杭州康基医疗器械有限公司 | 超声换能器的浮动支撑结构 |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| WO2021064536A1 (en) | 2019-09-30 | 2021-04-08 | Auris Health, Inc. | Medical instrument with capstan |
| CN114901188A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 动态滑轮系统 |
| WO2021137071A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Advanced basket drive mode |
| CN217447937U (zh) * | 2020-11-04 | 2022-09-20 | 安速康医疗(苏州)有限公司 | 超声手术刀 |
| CN215273148U (zh) * | 2021-03-03 | 2021-12-24 | 安速康医疗(苏州)有限公司 | 超声手术刀手柄与超声手术刀 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5665100A (en) * | 1989-12-05 | 1997-09-09 | Yoon; Inbae | Multifunctional instrument with interchangeable operating units for performing endoscopic procedures |
| US5322055B1 (en) | 1993-01-27 | 1997-10-14 | Ultracision Inc | Clamp coagulator/cutting system for ultrasonic surgical instruments |
| US5582617A (en) * | 1993-07-21 | 1996-12-10 | Charles H. Klieman | Surgical instrument for endoscopic and general surgery |
| CN1163558A (zh) * | 1994-10-11 | 1997-10-29 | 查尔斯·H·克利曼 | 具有可拆卸的端部操作装置的内窥镜仪器 |
| US5776155A (en) | 1996-12-23 | 1998-07-07 | Ethicon Endo-Surgery, Inc. | Methods and devices for attaching and detaching transmission components |
| US5873873A (en) | 1997-10-10 | 1999-02-23 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp mechanism |
| US5980510A (en) | 1997-10-10 | 1999-11-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having improved clamp arm pivot mount |
| US6325811B1 (en) | 1999-10-05 | 2001-12-04 | Ethicon Endo-Surgery, Inc. | Blades with functional balance asymmetries for use with ultrasonic surgical instruments |
| US6695782B2 (en) | 1999-10-05 | 2004-02-24 | Omnisonics Medical Technologies, Inc. | Ultrasonic probe device with rapid attachment and detachment means |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| JP4109096B2 (ja) * | 2002-01-11 | 2008-06-25 | オリンパス株式会社 | 超音波処置具 |
| BRPI0518171B8 (pt) | 2004-10-08 | 2021-06-22 | Ethicon Endo Surgery Inc | aparelho coagulador de pinça ultra-sônico |
| US8800838B2 (en) | 2005-08-31 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Robotically-controlled cable-based surgical end effectors |
| US20070191713A1 (en) | 2005-10-14 | 2007-08-16 | Eichmann Stephen E | Ultrasonic device for cutting and coagulating |
| US8574252B2 (en) | 2006-06-01 | 2013-11-05 | Ethicon Endo-Surgery, Inc. | Ultrasonic blade support |
| AU2008206385B2 (en) | 2007-01-16 | 2013-10-24 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for cutting and coagulating |
| US8226675B2 (en) * | 2007-03-22 | 2012-07-24 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| US8057498B2 (en) | 2007-11-30 | 2011-11-15 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument blades |
| US8808319B2 (en) * | 2007-07-27 | 2014-08-19 | Ethicon Endo-Surgery, Inc. | Surgical instruments |
| JP2010540186A (ja) | 2007-10-05 | 2010-12-24 | エシコン・エンド−サージェリィ・インコーポレイテッド | 人間工学的外科用器具 |
| US7922063B2 (en) | 2007-10-31 | 2011-04-12 | Tyco Healthcare Group, Lp | Powered surgical instrument |
| AU2009291688A1 (en) | 2008-09-12 | 2010-03-18 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for fingertip control |
| US8461744B2 (en) | 2009-07-15 | 2013-06-11 | Ethicon Endo-Surgery, Inc. | Rotating transducer mount for ultrasonic surgical instruments |
| US8939974B2 (en) * | 2009-10-09 | 2015-01-27 | Ethicon Endo-Surgery, Inc. | Surgical instrument comprising first and second drive systems actuatable by a common trigger mechanism |
| US8986302B2 (en) | 2009-10-09 | 2015-03-24 | Ethicon Endo-Surgery, Inc. | Surgical generator for ultrasonic and electrosurgical devices |
| CN102148548B (zh) * | 2010-02-09 | 2015-05-06 | 德昌电机(深圳)有限公司 | 医疗器械用马达组件 |
| US8486096B2 (en) | 2010-02-11 | 2013-07-16 | Ethicon Endo-Surgery, Inc. | Dual purpose surgical instrument for cutting and coagulating tissue |
| US20120116265A1 (en) | 2010-11-05 | 2012-05-10 | Houser Kevin L | Surgical instrument with charging devices |
| US9381058B2 (en) | 2010-11-05 | 2016-07-05 | Ethicon Endo-Surgery, Llc | Recharge system for medical devices |
| TWI571513B (zh) * | 2011-09-28 | 2017-02-21 | 幹細胞生物科技股份有限公司 | 體幹細胞及其製備方法 |
| US9050125B2 (en) * | 2011-10-10 | 2015-06-09 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instrument with modular end effector |
| US9301772B2 (en) * | 2012-05-31 | 2016-04-05 | Ethicon Endo-Surgery, Llc | Loading cartridge for surgical instrument end effector |
| US9393037B2 (en) | 2012-06-29 | 2016-07-19 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US10368892B2 (en) * | 2013-11-22 | 2019-08-06 | Ethicon Llc | Features for coupling surgical instrument shaft assembly with instrument body |
-
2013
- 2013-12-27 US US14/142,216 patent/US9539020B2/en active Active
-
2014
- 2014-12-23 WO PCT/US2014/072040 patent/WO2015100285A1/en active Application Filing
- 2014-12-23 EP EP14831133.5A patent/EP3086722B1/en active Active
- 2014-12-23 BR BR112016015023-6A patent/BR112016015023B1/pt active IP Right Grant
- 2014-12-23 JP JP2016542900A patent/JP6495297B2/ja not_active Expired - Fee Related
- 2014-12-23 CN CN201480071062.XA patent/CN105939679B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| BR112016015023A2 (ja) | 2017-08-08 |
| BR112016015023B1 (pt) | 2022-08-30 |
| US20150182250A1 (en) | 2015-07-02 |
| CN105939679B (zh) | 2019-06-21 |
| CN105939679A (zh) | 2016-09-14 |
| WO2015100285A1 (en) | 2015-07-02 |
| JP2017500157A (ja) | 2017-01-05 |
| EP3086722B1 (en) | 2021-06-30 |
| US9539020B2 (en) | 2017-01-10 |
| EP3086722A1 (en) | 2016-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6495297B2 (ja) | 超音波外科用器具の連結特徴部 | |
| US11883057B2 (en) | Ultrasonic surgical instrument with transducer slip joint | |
| US11723684B2 (en) | Surgical instrument with motorized articulation drive in shaft rotation knob | |
| EP3744267B1 (en) | Surgical instrument with selectively locked articulation assembly | |
| US8998939B2 (en) | Surgical instrument with modular end effector | |
| JP6426084B2 (ja) | 外科用器具エンドエフェクタ用カートリッジの搭載 | |
| EP2635220B1 (en) | Surgical instrument with modular end effector | |
| US10143513B2 (en) | Gear driven coupling between ultrasonic transducer and waveguide in surgical instrument | |
| JP2018514268A (ja) | 複数のロック位置を有する回転可能なシャフトを備えた手術器具 | |
| JP2015518755A5 (ja) | ||
| WO2018111563A1 (en) | Ultrasonic surgical instrument with transducer slip joint | |
| CA2816877A1 (en) | Surgical instrument with modular clamp pad | |
| JP6502363B2 (ja) | 超音波外科用器具の装填特徴部 | |
| JP2020525124A (ja) | 独立した、選択的に適用される回転ドライブレイン及びリニアドライブトレインを有する電動外科用器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190306 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6495297 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |