JP6469736B2 - センサ回路およびセンシング方法 - Google Patents
センサ回路およびセンシング方法 Download PDFInfo
- Publication number
- JP6469736B2 JP6469736B2 JP2017006151A JP2017006151A JP6469736B2 JP 6469736 B2 JP6469736 B2 JP 6469736B2 JP 2017006151 A JP2017006151 A JP 2017006151A JP 2017006151 A JP2017006151 A JP 2017006151A JP 6469736 B2 JP6469736 B2 JP 6469736B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- frequency
- resonator
- resonance frequency
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 12
- 230000010355 oscillation Effects 0.000 claims description 73
- 230000010363 phase shift Effects 0.000 claims description 72
- 230000008859 change Effects 0.000 claims description 38
- 239000003990 capacitor Substances 0.000 claims description 25
- 230000005540 biological transmission Effects 0.000 claims description 6
- 230000004044 response Effects 0.000 claims description 4
- 239000010408 film Substances 0.000 description 87
- 238000010586 diagram Methods 0.000 description 28
- 239000000758 substrate Substances 0.000 description 27
- 238000006073 displacement reaction Methods 0.000 description 15
- 230000035945 sensitivity Effects 0.000 description 15
- 230000001681 protective effect Effects 0.000 description 14
- 238000001514 detection method Methods 0.000 description 13
- 239000010409 thin film Substances 0.000 description 8
- 238000003780 insertion Methods 0.000 description 5
- 230000037431 insertion Effects 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 239000000126 substance Substances 0.000 description 5
- 239000007788 liquid Substances 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- -1 phenylene ether sulfone Chemical class 0.000 description 3
- 239000002904 solvent Substances 0.000 description 3
- VFUDMQLBKNMONU-UHFFFAOYSA-N 9-[4-(4-carbazol-9-ylphenyl)phenyl]carbazole Chemical compound C12=CC=CC=C2C2=CC=CC=C2N1C1=CC=C(C=2C=CC(=CC=2)N2C3=CC=CC=C3C3=CC=CC=C32)C=C1 VFUDMQLBKNMONU-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 2
- YTPLMLYBLZKORZ-UHFFFAOYSA-N Thiophene Chemical compound C=1C=CSC=1 YTPLMLYBLZKORZ-UHFFFAOYSA-N 0.000 description 2
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 2
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 2
- MWPLVEDNUUSJAV-UHFFFAOYSA-N anthracene Chemical compound C1=CC=CC2=CC3=CC=CC=C3C=C21 MWPLVEDNUUSJAV-UHFFFAOYSA-N 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 229920001577 copolymer Polymers 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- GNTDGMZSJNCJKK-UHFFFAOYSA-N divanadium pentaoxide Chemical compound O=[V](=O)O[V](=O)=O GNTDGMZSJNCJKK-UHFFFAOYSA-N 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 229920001519 homopolymer Polymers 0.000 description 2
- PQXKHYXIUOZZFA-UHFFFAOYSA-M lithium fluoride Chemical compound [Li+].[F-] PQXKHYXIUOZZFA-UHFFFAOYSA-M 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229920000620 organic polymer Polymers 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- KMXFZRSJMDYPPG-UHFFFAOYSA-N tetratetracontane Chemical compound CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC KMXFZRSJMDYPPG-UHFFFAOYSA-N 0.000 description 2
- TVIVIEFSHFOWTE-UHFFFAOYSA-K tri(quinolin-8-yloxy)alumane Chemical compound [Al+3].C1=CN=C2C([O-])=CC=CC2=C1.C1=CN=C2C([O-])=CC=CC2=C1.C1=CN=C2C([O-])=CC=CC2=C1 TVIVIEFSHFOWTE-UHFFFAOYSA-K 0.000 description 2
- PZWLRLIAVLSBQU-UHFFFAOYSA-N 1,2-dioctyl-9h-fluorene Chemical class C1=CC=C2C3=CC=C(CCCCCCCC)C(CCCCCCCC)=C3CC2=C1 PZWLRLIAVLSBQU-UHFFFAOYSA-N 0.000 description 1
- VXNZUUAINFGPBY-UHFFFAOYSA-N 1-Butene Chemical compound CCC=C VXNZUUAINFGPBY-UHFFFAOYSA-N 0.000 description 1
- STTGYIUESPWXOW-UHFFFAOYSA-N 2,9-dimethyl-4,7-diphenyl-1,10-phenanthroline Chemical compound C=12C=CC3=C(C=4C=CC=CC=4)C=C(C)N=C3C2=NC(C)=CC=1C1=CC=CC=C1 STTGYIUESPWXOW-UHFFFAOYSA-N 0.000 description 1
- RXACYPFGPNTUNV-UHFFFAOYSA-N 9,9-dioctylfluorene Chemical compound C1=CC=C2C(CCCCCCCC)(CCCCCCCC)C3=CC=CC=C3C2=C1 RXACYPFGPNTUNV-UHFFFAOYSA-N 0.000 description 1
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 1
- XMWRBQBLMFGWIX-UHFFFAOYSA-N C60 fullerene Chemical compound C12=C3C(C4=C56)=C7C8=C5C5=C9C%10=C6C6=C4C1=C1C4=C6C6=C%10C%10=C9C9=C%11C5=C8C5=C8C7=C3C3=C7C2=C1C1=C2C4=C6C4=C%10C6=C9C9=C%11C5=C5C8=C3C3=C7C1=C1C2=C4C6=C2C9=C5C3=C12 XMWRBQBLMFGWIX-UHFFFAOYSA-N 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- VEXZGXHMUGYJMC-UHFFFAOYSA-M Chloride anion Chemical compound [Cl-] VEXZGXHMUGYJMC-UHFFFAOYSA-M 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 229920003171 Poly (ethylene oxide) Polymers 0.000 description 1
- 239000005062 Polybutadiene Substances 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 239000004793 Polystyrene Substances 0.000 description 1
- 239000004372 Polyvinyl alcohol Substances 0.000 description 1
- KJTLSVCANCCWHF-UHFFFAOYSA-N Ruthenium Chemical compound [Ru] KJTLSVCANCCWHF-UHFFFAOYSA-N 0.000 description 1
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 description 1
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 239000000872 buffer Substances 0.000 description 1
- 239000002041 carbon nanotube Substances 0.000 description 1
- 229910021393 carbon nanotube Inorganic materials 0.000 description 1
- 229920002301 cellulose acetate Polymers 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 229910003472 fullerene Inorganic materials 0.000 description 1
- RBTKNAXYKSUFRK-UHFFFAOYSA-N heliogen blue Chemical compound [Cu].[N-]1C2=C(C=CC=C3)C3=C1N=C([N-]1)C3=CC=CC=C3C1=NC([N-]1)=C(C=CC=C3)C3=C1N=C([N-]1)C3=CC=CC=C3C1=N2 RBTKNAXYKSUFRK-UHFFFAOYSA-N 0.000 description 1
- 229910052738 indium Inorganic materials 0.000 description 1
- APFVFJFRJDLVQX-UHFFFAOYSA-N indium atom Chemical compound [In] APFVFJFRJDLVQX-UHFFFAOYSA-N 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 239000011777 magnesium Substances 0.000 description 1
- ORUIBWPALBXDOA-UHFFFAOYSA-L magnesium fluoride Chemical compound [F-].[F-].[Mg+2] ORUIBWPALBXDOA-UHFFFAOYSA-L 0.000 description 1
- 229910001635 magnesium fluoride Inorganic materials 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- IBHBKWKFFTZAHE-UHFFFAOYSA-N n-[4-[4-(n-naphthalen-1-ylanilino)phenyl]phenyl]-n-phenylnaphthalen-1-amine Chemical compound C1=CC=CC=C1N(C=1C2=CC=CC=C2C=CC=1)C1=CC=C(C=2C=CC(=CC=2)N(C=2C=CC=CC=2)C=2C3=CC=CC=C3C=CC=2)C=C1 IBHBKWKFFTZAHE-UHFFFAOYSA-N 0.000 description 1
- 239000002120 nanofilm Substances 0.000 description 1
- QGLKJKCYBOYXKC-UHFFFAOYSA-N nonaoxidotritungsten Chemical compound O=[W]1(=O)O[W](=O)(=O)O[W](=O)(=O)O1 QGLKJKCYBOYXKC-UHFFFAOYSA-N 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- SLIUAWYAILUBJU-UHFFFAOYSA-N pentacene Chemical compound C1=CC=CC2=CC3=CC4=CC5=CC=CC=C5C=C4C=C3C=C21 SLIUAWYAILUBJU-UHFFFAOYSA-N 0.000 description 1
- 229920003227 poly(N-vinyl carbazole) Polymers 0.000 description 1
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 1
- 229920000052 poly(p-xylylene) Polymers 0.000 description 1
- 229920002857 polybutadiene Polymers 0.000 description 1
- 229920001610 polycaprolactone Polymers 0.000 description 1
- 239000004632 polycaprolactone Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 239000004926 polymethyl methacrylate Substances 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 229920002223 polystyrene Polymers 0.000 description 1
- 229920002451 polyvinyl alcohol Polymers 0.000 description 1
- 229920000915 polyvinyl chloride Polymers 0.000 description 1
- 239000004800 polyvinyl chloride Substances 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 229910052707 ruthenium Inorganic materials 0.000 description 1
- 229910052594 sapphire Inorganic materials 0.000 description 1
- 239000010980 sapphire Substances 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 229910052814 silicon oxide Inorganic materials 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 239000011780 sodium chloride Substances 0.000 description 1
- 229910052596 spinel Inorganic materials 0.000 description 1
- 239000011029 spinel Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 238000010897 surface acoustic wave method Methods 0.000 description 1
- 229930192474 thiophene Natural products 0.000 description 1
- 229910052718 tin Inorganic materials 0.000 description 1
- 239000011135 tin Substances 0.000 description 1
- 229910001930 tungsten oxide Inorganic materials 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 239000011800 void material Substances 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/02—Analysing fluids
- G01N29/022—Fluid sensors based on microsensors, e.g. quartz crystal-microbalance [QCM], surface acoustic wave [SAW] devices, tuning forks, cantilevers, flexural plate wave [FPW] devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/02—Analysing fluids
- G01N29/036—Analysing fluids by measuring frequency or resonance of acoustic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/24—Probes
- G01N29/2437—Piezoelectric probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/30—Arrangements for calibrating or comparing, e.g. with standard objects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/36—Detecting the response signal, e.g. electronic circuits specially adapted therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/0004—Gaseous mixtures, e.g. polluted air
- G01N33/0009—General constructional details of gas analysers, e.g. portable test equipment
- G01N33/0027—General constructional details of gas analysers, e.g. portable test equipment concerning the detector
- G01N33/0031—General constructional details of gas analysers, e.g. portable test equipment concerning the detector comprising two or more sensors, e.g. a sensor array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R23/00—Arrangements for measuring frequencies; Arrangements for analysing frequency spectra
- G01R23/02—Arrangements for measuring frequency, e.g. pulse repetition rate; Arrangements for measuring period of current or voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R23/00—Arrangements for measuring frequencies; Arrangements for analysing frequency spectra
- G01R23/02—Arrangements for measuring frequency, e.g. pulse repetition rate; Arrangements for measuring period of current or voltage
- G01R23/06—Arrangements for measuring frequency, e.g. pulse repetition rate; Arrangements for measuring period of current or voltage by converting frequency into an amplitude of current or voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/01—Indexing codes associated with the measuring variable
- G01N2291/012—Phase angle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/025—Change of phase or condition
- G01N2291/0256—Adsorption, desorption, surface mass change, e.g. on biosensors
Landscapes
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Immunology (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Pathology (AREA)
- Acoustics & Sound (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Food Science & Technology (AREA)
- Medicinal Chemistry (AREA)
- Oscillators With Electromechanical Resonators (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
Description
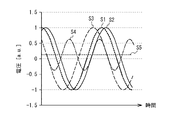
S1=A0・cos(ωt) 数式1
S2=A1・cos(ωt+θ1) 数式2
S3=A2・cos(ωt+θ2) 数式3
S4=A1・cos(ωt+θ1)×A2・cos(ωt+θ2)
=0.5・A1・A2・{cos(θ1−θ2)+A2・cos(2ωt+θ1+θ2)} 数式4
S5=0.5・A1・A2・cos(θ1−θ2) 数式5
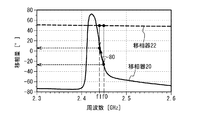
基準周波数f0 :2.45GHz
移相器20の移相量:−25°
移相器22の移相量:+50°
信号S3−S2の位相差:+75°
周波数f1 :2.44GHz
移相器20の移相量:+5°
移相器22の移相量:+50°
信号S3−S2の位相差:+45°
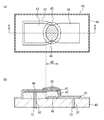
共振器として圧電薄膜共振器を用いる例を説明する。図6(a)は、実施例1における共振器の例を示す平面図、図6(b)は、図6(a)のA−A断面図である。図6(a)および図6(b)に示すように、基板40上に圧電膜42が設けられている。圧電膜42を挟むように下部電極41および上部電極43が設けられている。下部電極41と基板40との間に空隙46が形成されている。共振領域48は、圧電膜42の少なくとも一部を挟み下部電極41と上部電極43とが対向する領域である。共振領域48において、下部電極41および上部電極43は圧電膜42内に厚み縦振動モードの弾性波を励振する。基板40上に下部電極41、圧電膜42および上部電極43を覆うように保護膜44が設けられている。保護膜44上に感応膜45が設けられている。平面視において感応膜45は共振領域48を含んでいる。基板40の下面には電極51が設けられている。基板40および圧電膜42を貫通する貫通電極50が設けられている。貫通電極50は、下部電極41および上部電極43を電極51に接続する。
図7は、実施例1における発振回路の例を示す回路図である。図7に示すように、発振回路10は、共振器12および増幅器14を有している。共振器12は、弾性波共振器11および可変キャパシタVC1を有している。弾性波共振器11は、例えば図6(a)および図6(b)に示した圧電薄膜共振器である。弾性波共振器11および可変キャパシタVC1は出力端子T1とグランドとの間に並列に接続されている。
図10(a)から図10(c)は、実施例1における移相器の例を示す回路図である。図10(a)の移相器20では、信号S1aが入力する端子T2と信号S2が出力する端子T3の間に弾性波共振器21がシャント接続されている。図10(b)の移相器20では、端子T2とT3との間に弾性波共振器21とキャパシタC4がシャント接続されている。図10(c)の移相器20では、端子T2とT3との間に弾性波共振器21とキャパシタC4とが並列に接続されている。
図13(a)は、実施例1における移相器22の回路図、図13(b)は、移相器の周波数に対する移相量を示す図である。図13(a)に示すように、移相器22では、信号S1bが入力する端子T4と信号S3が出力する端子T5の間にキャパシタC5が直列に接続されている。
実施例1および2に用いる共振器12の弾性波共振器11の別の例を説明する。図16(a)から図17(b)は、実施例1および2における共振器の弾性波共振器の別の例である。図16(a)に示すように、貫通電極50および電極52を設けず、保護膜44に開口を設け開口内に端子54を設ける。端子54はそれぞれ下部電極41および上部電極43に電気的に接続されている。これにより、端子54にボンディングワイヤを接合させる、またはバンプによりフィリップチップ実装を行うことが可能となる。その他の構成は図6(a)および図6(b)と同じであり説明を省略する。
図18は、実施例1および2における共振器および移相器の弾性波共振器の例を示す平面図である。図19(a)および図19(b)は、それぞれ図18のA−AおよびB−B断面図である。図18から図19(b)に示すように、同じ基板40上に弾性波共振器11および21が設けられている。弾性波共振器11は保護膜44上の共振領域48内に感応膜45を有し、付加膜47を有していない。弾性波共振器21は上部電極43と保護膜44の間の共振領域48内に付加膜47を有し、感応膜45を有していない。下部電極41、圧電膜42および上部電極43の材料および膜厚は弾性波共振器11と21とでほぼ同じである。その他の構成は図6(a)および図6(b)と同じであり説明を省略する。
図22(a)および図22(b)は、実施例1および2におけるセンサ回路の断面図である。図22(a)に示すように、基板40の上面に弾性波共振器11、21および配線62が設けられている。配線62は、それぞれ弾性波共振器11および21の下部電極41および上部電極43に接続されている。基板40の下面に電極52が設けられている。貫通電極50は配線62と電極52とを電気的に接続する。基板56は例えばシリコン基板等の半導体基板である。基板56には、弾性波共振器11および21以外の回路素子が設けられている。基板56の上面に電極58が設けられている。基板40は基板56上にフェースアップ実装されている。電極58と52とはバンプ60により接合されている。その他の構成は、図18から図20(b)と同様である。
11、21 弾性波共振器
12 共振器
14 増幅器
16 分岐回路
18 移相回路
20、22 移相器
24 ミキサ
26 LPF
28、30 増幅回路
32 制御部
40 基板
41 下部電極
42 圧電膜
43 上部電極
44 保護膜
45 感応膜
46 空隙
48 共振領域
Claims (11)
- 感応部の質量が変化することで共振周波数および/または反共振周波数が変化する共振器と、
前記共振周波数または前記反共振周波数に対応する発振信号を出力する増幅器と、
前記発振信号が分岐された第1信号および第2信号の位相差を前記発振信号の周波数の変化に対応して変化させる移相回路と、
前記移相回路が位相差を変化させた前記第1信号と前記第2信号とをミキシングすることで前記共振器の前記共振周波数または反共振周波数の変化に対応する信号を出力するミキサと、
を具備するセンサ回路。 - 前記移相回路は、前記第1信号の位相を第1移相量で変化させる第1移相器と、前記第2信号の位相を第2移相量で変化させ、前記第2信号の周波数の変化に対する前記第2移相量の変化量は前記第1信号の周波数の変化に対する第1移相量の変化量と異なる第2移相器と、を有する請求項1記載のセンサ回路。
- 前記第1移相器は、第1弾性波共振器を有する請求項2記載のセンサ回路。
- 前記第1弾性波共振器は、前記第1信号が伝送する伝送線路にシャント接続されている請求項3記載のセンサ回路。
- 前記第1移相器は、前記第1弾性波共振器に並列に、前記伝送線路にシャント接続されたキャパシタを有する請求項4記載のセンサ回路。
- 前記第1信号の周波数は、前記第1弾性波共振器の反共振周波数近傍に位置する請求項4または5記載のセンサ回路。
- 前記共振器は第2弾性波共振器を含む請求項1から6のいずれか一項記載のセンサ回路。
- 前記第2弾性波共振器は、
圧電層と、
前記圧電層の少なくとも一部を挟む第1電極および第2電極と、
前記第2電極の前記圧電層と反対側に設けられ、前記感応部である感応膜と、
を有する請求項7記載のセンサ回路。 - 前記ミキサの出力端子に接続され、前記発振信号の周波数のより低い遮断周波数を有するローパスフィルタを具備する請求項1から8のいずれか一項記載のセンサ回路。
- センシング前に前記共振器の共振周波数および/または反共振周波数を調整する制御部を具備する請求項1から9のいずれか一項記載のセンサ回路。
- 感応部の質量が変化することで変化する共振器の共振周波数または反共振周波数に対応する発振信号を出力するステップと、
前記発振信号が分岐された第1信号および第2信号の位相差を前記発振信号の周波数の変化に対応して変化させるステップと、
前記位相差を変化させた前記第1信号と前記第2信号とをミキシングすることで前記共振器の前記共振周波数または前記反共振周波数の変化に対応する信号を出力するステップと、
を含むセンシング方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017006151A JP6469736B2 (ja) | 2017-01-17 | 2017-01-17 | センサ回路およびセンシング方法 |
| US15/839,401 US20180202976A1 (en) | 2017-01-17 | 2017-12-12 | Sensor circuit and sensing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017006151A JP6469736B2 (ja) | 2017-01-17 | 2017-01-17 | センサ回路およびセンシング方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018115927A JP2018115927A (ja) | 2018-07-26 |
| JP6469736B2 true JP6469736B2 (ja) | 2019-02-13 |
Family
ID=62838247
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017006151A Active JP6469736B2 (ja) | 2017-01-17 | 2017-01-17 | センサ回路およびセンシング方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20180202976A1 (ja) |
| JP (1) | JP6469736B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI769542B (zh) * | 2020-09-30 | 2022-07-01 | 新唐科技股份有限公司 | 氣體感測結構 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3482046B1 (en) * | 2016-09-30 | 2022-11-23 | Halliburton Energy Services, Inc. | Frequency sensors for use in subterranean formation operations |
| JP2020064014A (ja) * | 2018-10-18 | 2020-04-23 | 太陽誘電株式会社 | センサ回路 |
| JP7451134B2 (ja) * | 2019-10-21 | 2024-03-18 | 太陽誘電株式会社 | センサデバイス |
| WO2021172588A1 (ja) * | 2020-02-28 | 2021-09-02 | 太陽誘電株式会社 | センサ装置およびその製造方法 |
| JPWO2022203057A1 (ja) * | 2021-03-26 | 2022-09-29 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4118665A (en) * | 1977-12-08 | 1978-10-03 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Time domain phase measuring apparatus |
| US4312228A (en) * | 1979-07-30 | 1982-01-26 | Henry Wohltjen | Methods of detection with surface acoustic wave and apparati therefor |
| JP2554511B2 (ja) * | 1987-11-30 | 1996-11-13 | 日本ヒューレット・パッカード株式会社 | ベクトル電流計 |
| FR2647221B1 (fr) * | 1989-05-19 | 1991-08-16 | Thomson Csf | Chaine de mesure de la caracteristique de bruit de phase additif d'un composant au voisinage d'une frequence porteuse |
| JPH06307887A (ja) * | 1993-04-01 | 1994-11-04 | Hewlett Packard Co <Hp> | 音響遅延装置、音波装置および音波装置の動作方法 |
| EP0632266A3 (en) * | 1993-06-29 | 1996-12-27 | Hewlett Packard Co | Piezoelectric surface wave sensor with immobilized lectin for carbohydrate analysis. |
| US5763283A (en) * | 1994-10-12 | 1998-06-09 | Sandia Corporation | Method and apparatus for phase for and amplitude detection |
| US5932953A (en) * | 1997-06-30 | 1999-08-03 | Iowa State University Research Foundation, Inc. | Method and system for detecting material using piezoelectric resonators |
| US6161420A (en) * | 1997-11-12 | 2000-12-19 | Fisher Controls International, Inc. | High frequency measuring circuit |
| US7386286B2 (en) * | 2001-06-01 | 2008-06-10 | Broadband Innovations, Inc. | High frequency low noise phase-frequency detector and phase noise reduction method and apparatus |
| KR100455127B1 (ko) * | 2003-01-24 | 2004-11-06 | 엘지전자 주식회사 | 박막 용적 탄성파 공진기를 이용한 물질 센서 모듈 |
| US20070000305A1 (en) * | 2005-06-30 | 2007-01-04 | Qing Ma | Gas phase chemical sensor based on film bulk resonators (FBAR) |
| JP2011252932A (ja) * | 2005-09-15 | 2011-12-15 | Nippon Dempa Kogyo Co Ltd | 水晶発振器及び感知装置 |
| US7809517B1 (en) * | 2007-09-07 | 2010-10-05 | National Semiconductor Corporation | Apparatus and method for measuring phase noise/jitter in devices under test |
| FR2921493A1 (fr) * | 2007-09-20 | 2009-03-27 | St Microelectronics Sa | Circuit electrique comprenant un dispositif de mesure du bruit de phase d'un dispositif oscillant et/ou resonant |
| JP5066551B2 (ja) * | 2008-05-20 | 2012-11-07 | 日本電波工業株式会社 | 圧電センサ及び感知装置 |
| WO2010061479A1 (ja) * | 2008-11-28 | 2010-06-03 | 富士通株式会社 | 弾性波デバイス、およびその製造方法 |
| US8456250B2 (en) * | 2009-02-04 | 2013-06-04 | Sand 9, Inc. | Methods and apparatus for tuning devices having resonators |
| US8395456B2 (en) * | 2009-02-04 | 2013-03-12 | Sand 9, Inc. | Variable phase amplifier circuit and method of use |
| JP4792098B2 (ja) * | 2009-04-16 | 2011-10-12 | 日本電波工業株式会社 | 感知装置 |
| ES2333088B2 (es) * | 2009-06-23 | 2011-02-07 | Universidad Politecnica De Valencia | Metodo y dispositivo de nanogravimetria en medios fluidos basado en resonadores piezoelectricos. |
| US20110113856A1 (en) * | 2009-11-13 | 2011-05-19 | Honeywell International | All-differential resonant nanosensor apparatus and method |
| US9032782B1 (en) * | 2010-06-16 | 2015-05-19 | Rapid Diagnostek, Inc. | Diagnostic testing sensors for resonant detectors |
| CN103403538B (zh) * | 2010-10-20 | 2016-06-01 | 快速诊断技术公司 | 利用共振传感器测量结合动力的装置和方法 |
| US8686802B1 (en) * | 2011-01-16 | 2014-04-01 | Micrel, Incorporated | Bias voltage tuning of MEMS resonator operation point |
| US9354202B2 (en) * | 2011-09-21 | 2016-05-31 | David Lawrence Medin | Detecting mass on a MEMS biooscillating resonator array |
| FR3046154A1 (fr) * | 2015-12-28 | 2017-06-30 | Centre Nat Rech Scient | Procede d'amplification par un resonateur mecanique. |
| KR20180055294A (ko) * | 2016-11-16 | 2018-05-25 | 삼성전자주식회사 | Fbar 발진기 및 이를 이용하는 가스 감지 시스템 |
-
2017
- 2017-01-17 JP JP2017006151A patent/JP6469736B2/ja active Active
- 2017-12-12 US US15/839,401 patent/US20180202976A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI769542B (zh) * | 2020-09-30 | 2022-07-01 | 新唐科技股份有限公司 | 氣體感測結構 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180202976A1 (en) | 2018-07-19 |
| JP2018115927A (ja) | 2018-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6469736B2 (ja) | センサ回路およびセンシング方法 | |
| US7378781B2 (en) | Acoustic wave resonator with integrated temperature control for oscillator purposes | |
| US7659654B2 (en) | Piezoelectrics oscillator, sensor, and multi-sensor | |
| CN108075744B (zh) | 薄膜体声波谐振振荡器和气体感测系统及其操作方法 | |
| US7847647B2 (en) | Oscillator circuit with acoustic single-port surface wave resonators | |
| JP2007535883A (ja) | 温度ドリフトに対して周波数が安定性を有するfbarデバイス | |
| CN102132128A (zh) | 音叉振荡器和其制造方法以及角速度传感器 | |
| KR100706520B1 (ko) | 탄성 표면파 센서 내장 발진회로 및 바이오센서 장치 | |
| US10033085B2 (en) | Acoustic-wave device with active calibration mechanism | |
| JP2006033195A (ja) | 水晶発振器及び感知装置 | |
| US6803698B2 (en) | Acceleration sensor | |
| WO2000042704A1 (fr) | Element de traitement des ondes acoustiques de surface et dispositif de traitement des ondes acoustiques de surface | |
| GB2554400A (en) | Bulk acoustic wave resonator based sensor | |
| Thomas et al. | High-frequency one-port colpitts SAW oscillator for chemical sensing | |
| JP2020064014A (ja) | センサ回路 | |
| Ralib et al. | Silicon compatible Acoustic wave resonators: Design, fabrication and performance | |
| Specht et al. | CMOS compatible aluminium nitride solidly mounted resonator with an integrated microheater for temperature modulation | |
| JP2003229724A (ja) | Fm検波回路 | |
| WO2023189334A1 (ja) | 弾性波センサおよびその製造方法 | |
| KR102314169B1 (ko) | 화학 탐지 장치 및 이의 측정 방법 | |
| WO2023188760A1 (ja) | 検出装置およびその製造方法 | |
| JP2023111668A (ja) | 検出装置 | |
| WO2023145434A1 (ja) | 検出装置 | |
| Huang et al. | An ultrasound source based on a micro-machined electromechanical resonator | |
| JPH07169661A (ja) | 電子音響集積回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6469736 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |