JP6436629B2 - Paddy field machine - Google Patents
Paddy field machine Download PDFInfo
- Publication number
- JP6436629B2 JP6436629B2 JP2014000454A JP2014000454A JP6436629B2 JP 6436629 B2 JP6436629 B2 JP 6436629B2 JP 2014000454 A JP2014000454 A JP 2014000454A JP 2014000454 A JP2014000454 A JP 2014000454A JP 6436629 B2 JP6436629 B2 JP 6436629B2
- Authority
- JP
- Japan
- Prior art keywords
- working
- operated
- paddy field
- groove
- feeding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 241000209094 Oryza Species 0.000 claims description 39
- 235000007164 Oryza sativa Nutrition 0.000 claims description 39
- 235000009566 rice Nutrition 0.000 claims description 39
- 230000005540 biological transmission Effects 0.000 description 47
- 230000036544 posture Effects 0.000 description 41
- 238000010899 nucleation Methods 0.000 description 28
- 238000009331 sowing Methods 0.000 description 23
- 238000000034 method Methods 0.000 description 13
- 238000005452 bending Methods 0.000 description 10
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 6
- 239000003550 marker Substances 0.000 description 6
- 239000000463 material Substances 0.000 description 5
- 238000000576 coating method Methods 0.000 description 4
- 238000005520 cutting process Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000007726 management method Methods 0.000 description 4
- 238000005096 rolling process Methods 0.000 description 4
- 239000011248 coating agent Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 229910052742 iron Inorganic materials 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 241000196324 Embryophyta Species 0.000 description 2
- 244000061456 Solanum tuberosum Species 0.000 description 2
- 235000002595 Solanum tuberosum Nutrition 0.000 description 2
- 238000012840 feeding operation Methods 0.000 description 2
- 230000035784 germination Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 208000010247 contact dermatitis Diseases 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 238000003197 gene knockdown Methods 0.000 description 1
- 239000010720 hydraulic oil Substances 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 239000004071 soot Substances 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
- 238000009333 weeding Methods 0.000 description 1
Images



















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P60/00—Technologies relating to agriculture, livestock or agroalimentary industries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P60/00—Technologies relating to agriculture, livestock or agroalimentary industries
- Y02P60/20—Reduction of greenhouse gas [GHG] emissions in agriculture, e.g. CO2
Landscapes
- Transplanting Machines (AREA)
- Sowing (AREA)
Description
本発明は、田面に種籾を供給する直播装置を乗用型直播機や、田面に苗を植え付ける苗植付装置を備えた乗用型田植機等の水田作業機に関する。 The present invention relates to a paddy field work machine such as a riding type direct sowing machine for direct seeding equipment for supplying seed rice to a rice field, or a riding type rice transplanting machine equipped with a seedling planting device for planting seedlings on a rice field.
水田作業機の一例である乗用型直播機では、特許文献1に開示されているように、田面に種籾を供給する8個の繰り出し部(作業部に相当)が、左右方向に所定間隔を置いて並べて配置されて、8条型式の直播装置(水田作業装置に相当)が構成され、機体の後部に直播装置が支持されているものがある。これにより、左右方向に所定間隔(供給ラインの間隔、条間)を置いて8条に亘って、種籾が田面に供給される(直播作業)。
The riding straight seeder is an example of paddy working machine, as disclosed in
この場合、乗用型直播機では、水田の全面に亘って種籾を供給するのが一般的であり、田面に苗を植え付ける苗植付装置を備えた乗用型田植機においても、同様に水田の全面に亘って苗を植え付けるのが一般的である。所定間隔(供給ラインの間隔、条間)としては一般的な300〜250mmや、これよりも密な150mmが設定されることがある。 In this case, it is common for the riding type direct sowing machine to supply seed pods over the entire surface of the paddy field. Similarly, in the riding type rice planting machine equipped with a seedling planting device for planting seedlings on the paddy field, the entire surface of the paddy field It is common to plant seedlings over the entire area. As a predetermined interval (interval of supply line, interval), a general 300 to 250 mm or a denser 150 mm may be set.
一般に直播作業(植付作業)を行った後、苗が発芽(成長)してから、除草作業や薬剤の散布作業等の中間作業を行うことがある。
本発明は、苗が発芽(成長)してからの中間作業が行い易いものとなる水田作業機を得ることを目的としている。
In general, after direct seeding work (planting work), after the seedlings germinate (grow), intermediate work such as weeding work or drug spraying work may be performed.
An object of the present invention is to obtain a paddy field machine that facilitates an intermediate operation after a seedling has germinated (grown).
[I]
(構成)
本発明の第1特徴は、水田作業機において次のように構成することにある。
機体の後部に水田作業装置を備え、
田面に種籾を供給する繰り出し部である複数の作業部又は田面に苗を植え付ける植付アームである複数の作業部を、左右方向に所定間隔を置いて並べて配置して、前記水田作業装置を構成し、
複数の前記作業部のうちの特定の前記作業部を、作動及停止状態に操作自在な操作機構を備え、
特定の前記作業部に対応する田面に位置するように、排水用の溝を形成する溝切り器が備えられ、
複数の前記作業部を、右端部の前記作業部が機体の右の後輪の後方位置に対して右横外側に位置し、左端部の前記作業部が機体の左の後輪の後方位置に対して左横外側に位置するように、左右方向に所定間隔を置いて並べて配置して、前記水田作業装置を構成し、
特定の前記作業部が、右端部及び左端部の前記作業部を除いた残りの前記作業機のうちの一つであり、
前記溝切り器が、田面に接地して排水用の溝を形成する作用姿勢、及び田面から上方に離れた退避姿勢に姿勢変更自在であり、
前記操作機構により特定の前記作業部が停止状態に操作されると、前記溝切り器が前記作用姿勢に操作され、前記操作機構により特定の前記作業部が作動状態に操作されると、前記溝切り器が前記退避姿勢に操作される。
[I]
(Constitution)
The first feature of the present invention resides in the following configuration in a paddy field work machine.
A paddy field working device is installed at the rear of the aircraft,
The paddy field work apparatus is configured by arranging a plurality of work sections that are feeding sections for supplying seed pods to a rice field or a plurality of work sections that are planting arms for planting seedlings on a rice field at a predetermined interval in the left-right direction. And
An operation mechanism that can freely operate the specific working unit among the plurality of working units in an activated and stopped state,
A grooving device for forming a groove for drainage is provided so as to be located on the surface corresponding to the specific working unit,
A plurality of the working parts are arranged such that the working part at the right end is located right laterally outside the rear position of the right rear wheel of the aircraft, and the working part at the left end is located at the rear position of the left rear wheel of the aircraft. The paddy field work device is configured by arranging the left and right sides so as to be positioned at a predetermined interval in the left-right direction,
The specific working unit is one of the remaining working machines excluding the working unit at the right end and the left end,
The grooving device is capable of changing its posture to an action posture in which a groove for drainage is formed by grounding on a rice field, and a retreat posture away from the rice field,
When the specific working unit is operated to be stopped by the operating mechanism, the grooving device is operated to the working posture, and when the specific working unit is operated to be operated by the operating mechanism, the groove is The cutting device is operated to the retracted position.
(作用及び発明の効果)
[I]−1
本発明の第1特徴によると、特定の作業部を停止状態に操作して直播作業(植付作業)を行うと、特定の作業部に対応する田面に種籾が供給されない状態で(苗が植え付けられない状態で)、残りの作業部から田面に種籾が供給される(苗が植え付けられる)。
この後に苗が発芽(成長)すると、特定の作業部に対応する田面の部分には苗が存在しないのであり、苗が存在しない田面の部分が一つの道のように水田に形成される。
(Operation and effect of the invention)
[I] -1
According to the first feature of the present invention, when direct sowing work (planting work) is performed by operating a specific working unit in a stopped state, seedlings are not planted on the rice field corresponding to the specific working unit The seeds are supplied to the rice field from the remaining working department (seedlings are planted).
Thereafter, when the seedlings germinate (grow), there are no seedlings on the part of the rice field corresponding to the specific working part, and the part of the rice field where the seedlings do not exist is formed in the paddy field like one road.
これにより、中間作業を行う場合、苗が存在しない田面の部分を通って作業者が水田に入ることにより、作業者は苗を踏んだり倒したりすることを避けながら容易に水田に入って中間作業を行うことができる。
乗用型管理機を水田に入れて中間作業を行う場合も同様に、乗用型管理機の車輪を苗が存在しない田面の部分に位置させることにより、乗用型管理機の車輪が苗を踏んだり倒したりすることを避けながら、乗用型管理機を容易に水田に入れて中間作業を行うことができる。
As a result, when intermediate work is performed, the worker enters the paddy field through the part of the paddy field where no seedling exists, so that the worker can easily enter the paddy field and avoid intermediate work while avoiding stepping on or overturning the seedling. It can be performed.
Similarly, when carrying out intermediate work with a riding type management machine in a paddy field, the wheels of the riding type management machine step on or knock down the seedling by positioning the riding type management machine wheel on the paddy field where no seedling exists. It is possible to easily put a riding type management machine into a paddy field and perform intermediate work.
例えば所定間隔を150mmというような密な状態に設定した場合、水田の風通しという面で不利になることがある。
この場合、特定の作業部を停止状態に操作しておくと、苗が存在しない田面の部分が風の通り道となるので、水田の風通しを良いものにすることができる。
For example, when the predetermined interval is set to a dense state such as 150 mm, it may be disadvantageous in terms of ventilation of paddy fields.
In this case, if the specific working unit is operated in a stopped state, the portion of the rice field where no seedlings exist becomes a passage for the wind, so that the paddy field can be well ventilated.
[I]−2
前項[I]−1に記載のように、特定の作業部を停止状態に操作して直播作業(植付作業)を行うと、苗が存在しない田面の部分が生じるので、収穫量という面で不利になることがある。
これにより、中間作業の必要性が少ない場合、特定の作業部を作動状態に操作して直播作業(植付作業)を行って、水田の全面に亘って種籾を供給するようにすればよい(苗を植え付けるようにすればよい)。
[I] -2
As described in the preceding item [I] -1, when a specific working part is operated in a stopped state and direct seeding work (planting work) is performed, a portion of the rice field where seedlings do not exist is generated. It can be disadvantageous.
Thereby, when there is little necessity for intermediate work, what is necessary is just to operate a specific working part to an operation state, to perform direct sowing work (planting work), and to supply seed potato over the whole surface of a paddy field ( Plant seedlings).
[II]
(構成)
本発明の第2特徴は、本発明の第1特徴の水田作業機において次のように構成することにある。
特定の前記作業部が、前記後輪の後方の位置で前記後輪の通過軌跡を通過する位置に配置された前記作業部である。
(作用及び発明の効果)
後輪の通過により溝が形成されたりして、後輪の後方位置の田面の部分は荒れていることが多いので、後輪の後方の位置で後輪の通過軌跡を通過する位置の田面の部分に種籾を供給することは(苗を植え付けることは)、この後の苗の発芽(成長)の面で不利になることがある。
[ II ]
(Constitution)
The second feature of the present invention resides in the following configuration in the paddy field working machine of the first feature of the present invention.
The specific working unit is the working unit arranged at a position behind the rear wheel so as to pass the passage trajectory of the rear wheel.
(Operation and effect of the invention)
Since the groove is formed by the passage of the rear wheel, the portion of the surface at the rear position of the rear wheel is often rough, so the surface of the surface at the position that passes the trajectory of the rear wheel at the position behind the rear wheel. Supplying seed pods to the part (planting seedlings) can be disadvantageous in terms of the subsequent germination (growth) of the seedlings.
本発明の第2特徴によると、後輪の後方の位置で後輪の通過軌跡を通過する位置に配置された作業部を特定の作業部としているので、特定の作業部を停止状態に操作しても、前述のように後輪の後方の位置で後輪の通過軌跡を通過する位置という不利な部分において、種籾の供給(苗の植え付け)を停止することになる。
これにより、特定の作業部を停止状態に操作することによって、後輪の後方の位置で後輪の通過軌跡を通過する位置という不利な部分に種籾の供給(苗の植え付け)が行われるという状態を少なくすることができて、苗の発芽(成長)の面で不利になる状態を少なくすることができる。
[III]
(構成)
本発明の第3特徴は、本発明の第1特徴〜第2特徴のうちのいずれか一つの水田作業機において次のように構成することにある。
前記水田作業装置は、左右方向に所定間隔を置いて並べて配置された複数の前側の前記作業部と、前側の前記作業部の後側で左右方向に所定間隔を置いて並べて配置された複数の後側の前記作業部とを備えており、
特定の前記作業部が、後側の前記作業部のうちの一つである。
According to the second feature of the present invention, since the working unit arranged at the position behind the rear wheel and passing through the passage of the rear wheel is the specific working unit, the specific working unit is operated in a stopped state. However, as described above, the supply of seed pods (planting of seedlings) is stopped at the disadvantageous position of passing through the rear wheel trajectory at the position behind the rear wheel.
Thereby, by operating a specific working part in a stopped state, seed pods are supplied (planting seedlings) to an unfavorable part at a position behind the rear wheel and passing through the passage trajectory of the rear wheel. Therefore, it is possible to reduce the state that is disadvantageous in terms of seedling germination (growth).
[ III ]
(Constitution)
The third feature of the present invention resides in the following configuration in the paddy field working machine according to any one of the first feature to the second feature of the present invention.
The paddy field work device includes a plurality of front side working units arranged at predetermined intervals in the left-right direction and a plurality of front side working units arranged at predetermined intervals in the left-right direction on the rear side of the front working unit. And the working part on the rear side,
The specific working unit is one of the rear working units.
[IV]
(構成)
本発明の第4特徴は、本発明の第1特徴〜第3特徴のうちのいずれか一つの水田作業機において次のように構成することにある。
前記作業部に動力を伝動及び遮断自在なクラッチ部材を前記作業部の各々に備えて、
特定の前記作業部の前記クラッチ部材を遮断状態に操作することにより、特定の前記作業部を停止状態に操作するように構成している。
[ IV ]
(Constitution)
The fourth feature of the present invention resides in the following configuration in any one of the first to third features of the present invention .
The freely clutch member transmission and cut off the power before Symbol working unit provided to each of said working portions,
By operating the clutch member of the specific working unit to the disconnected state, the specific working unit is operated to be stopped.
(作用及び発明の効果)
[IV]−1
複数の作業部を左右方向に所定間隔を置いて並べて配置して水田作業装置を構成した場合、作業部に動力を伝動及び遮断自在なクラッチ部材を、作業部の各々に備えることがる。
従って、これまでのクラッチ部材の通常の使用形態では、水田の外形状等に応じて、例えば第1供給ライン(第1条)の作業部を停止状態に操作したり、第1及び第2供給ライン(第1及び第2条)の作業部を停止状態に操作したり、第1,2,3供給ライン(第1,2,3条)の作業部を停止状態に操作したり、第1,2,3,4供給ライン(第1,2,3,4条)の作業部を停止状態に操作したりすることがある(少数条クラッチとしての機能)。
(Operation and effect of the invention)
[ IV ] -1
When a paddy field working apparatus is configured by arranging a plurality of working parts side by side at predetermined intervals in the left-right direction, each working part may be provided with a clutch member capable of transmitting and interrupting power to the working part.
Therefore, in the normal usage form of the clutch member so far, according to the outer shape of the paddy field, for example, the working part of the first supply line (first article) is operated in a stopped state, or the first and second supply Operate the working part of the line (first and second article) in the stopped state, operate the working part of the first, second and third supply lines (first, second and third article) in the stopped state, , 2, 3 and 4 supply lines (first, second, third and fourth) may be operated in a stopped state (function as a small number of clutches).
以上のように、これまでのクラッチ部材の通常の使用形態では、左端部(右端部)の作業部から順番に停止状態に操作するのであり、右端部及び左端部の作業部を作動させた状態で、中間の作動部を停止状態に操作することはない(例えば第1,2,4・・供給ライン(第1,2,4・・条)の作業部を作動させた状態で、第3供給ライン(第3条)の作動部を停止状態に操作することはない)。 As described above, in the normal use form of the clutch member so far, the operation part is operated in a stopped state in order from the working part of the left end part (right end part), and the working part of the right end part and the left end part is operated. Thus, the intermediate working part is not operated to be stopped (for example, the third working part is operated in the state in which the working part of the first, second, fourth, supply line (first, second, fourth, etc.) is operated). The operating part of the supply line (Article 3) is not operated in the stopped state).
[IV]−2
前項[IV]−1に記載の状態に対して、本発明の第4特徴によると、これまでのクラッチ部材の通常の使用形態(少数条クラッチとしての機能)において、既存の部材であるクラッチ部材を利用しているのであり、これまでのクラッチ部材の通常の使用形態(少数条クラッチとしての機能)に反する使用形態で、操作機構により特定の作業部を伝動及び停止状態に操作するように構成している。
[ IV ] -2
According to the fourth aspect of the present invention, in contrast to the state described in [ IV ] -1, the clutch member which is an existing member in the conventional usage form of the clutch member so far (function as a minority clutch) It is configured to operate a specific working part in a transmission and stop state by an operation mechanism in a usage mode contrary to the normal usage mode (function as a minority clutch) of the conventional clutch member. doing.
これにより、本発明の第4特徴によると、特定の作業部のクラッチ部材が、これまでのクラッチ部材の通常の使用形態(少数条クラッチとしての機能)、並びに、これまでのクラッチ部材の通常の使用形態(少数条クラッチとしての機能)に反する操作機構による使用形態の、2つの使用形態に用いられるようになって、構造の簡素化の面で有利なものとなる。 Thereby, according to the 4th characteristic of this invention, the clutch member of a specific working part is the normal use form (function as a small number of clutches) of a conventional clutch member, and the usual clutch member of the past It is used in two usage modes, that is, a usage mode using an operating mechanism that is contrary to the usage mode (function as a small number of clutches), which is advantageous in terms of simplification of the structure.
[1]
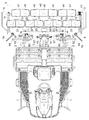
図1及び図2に示すように、前輪1及び後輪2で支持された機体の後部に、リンク機構3が上下揺動自在に支持されて、リンク機構3を上下に揺動駆動する油圧シリンダ4が備えられており、催芽状態で少し芽が出始めた状態の種籾や鉄コーティング処理された種籾を点播状態で田面Gに供給する15条型式の直播装置5(水田作業装置に相当)が、リンク機構3の後部に支持されて、水田作業機の一例である乗用型直播機が構成されている。
[1]
As shown in FIGS. 1 and 2, a hydraulic cylinder that swings the
[2]
次に、直播装置5の全体のフレーム構成について説明する(その1)。
図5及び図9に示すように、左右方向の横フレーム6,8,9が備えられており、横フレーム6,8,9の右及び左端部に亘って前後方向の右及び左の縦フレーム16が連結され、横フレーム6に4個の前後方向の縦フレーム17が連結されて、平面視で枠状のフレームが構成されている。この枠状のフレームに各部が支持されて、直播装置5の全体が構成されている。
[2]
Next, the overall frame configuration of the
As shown in FIGS. 5 and 9,
図5及び図9に示すように、横フレーム6の右及び左側部に上下方向のフレーム10が連結されており、フレーム10の上部及び中間部に亘って左右方向の横フレーム11,12が連結されている。横フレーム6の中央部に、ローリング軸13が連結されて前向きに突出している。リンク機構3において、上下方向のヒッチフレーム14の下端部にボス部14aが連結されて、ローリング軸13がヒッチフレーム14のボス部14aに回転自在に支持されており、ヒッチフレーム14の上部とフレーム10の上部とに亘って、右及び左のバネ15が接続されている。
As shown in FIGS. 5 and 9, a
図1及び図5に示すように、直播装置5を機体の後部に支持させた状態において、バネ15の付勢力により機体と平行な状態に戻されようとする状態で、直播装置5が田面Gに沿うようにローリング軸13の前後軸芯P1周りに自由にローリングする。
図5及び図9に示すように、横フレーム6においてローリング軸13の右及び左側部に右及び左の受け部6aが連結されており、リンク機構3を上限まで上昇させると、リンク機構3が横フレーム6の受け部6aに当たって、直播装置5がローリングしないように保持される。
As shown in FIGS. 1 and 5, in a state where the
As shown in FIGS. 5 and 9, the right and left receiving
[3]
次に、直播装置5の全体のフレーム構成について説明する(その2)。
図1,2,9に示すように、横フレーム6の右及び左端部にブラケット6bが連結されて、次の作業行程の目印を田面Gに形成する右及び左のマーカー18が、横フレーム6のブラケット6bの前後軸芯周りに上下に揺動自在に支持されている。これによって、田面Gに接地して田面Gに目印を形成する作用姿勢、及び田面Gから上方に位置した格納姿勢に、右及び左のマーカー18を操作する。
[3]
Next, the overall frame configuration of the
As shown in FIGS. 1, 2 and 9,
図2及び図9に示すように、縦フレーム16の前端部に断面コ字状のブラケット16aが前後向きに連結されている。丸パイプをクランク状に折り曲げた右及び左のガード部材19が、縦フレーム16のブラケット16aに前後軸芯P3周りに回転自在に支持されている。
As shown in FIGS. 2 and 9, a
図2及び図9に示す状態は、ガード部材19を固定ピン(図示せず)により横向き姿勢に固定した状態であり、横向き姿勢において直播装置5の右及び左側がガード部材19により保護される。
路上等においてガード部材19を下向き姿勢に変更して固定ピンにより固定すると、直播装置5を地面まで下降させた場合、ガード部材19を直播装置5のスタンドとして使用することができる。
The state shown in FIGS. 2 and 9 is a state in which the
When the
図5,7,9,15に示すように、横フレーム6において後輪2の後方に対応する部分に、縦フレーム61が連結されて前方に延出されており、縦フレーム61の前端部に上下向きのフレーム62が連結され、フレーム62の上端部に左右向きのフレーム63が連結されている。後輪2が後方に跳ね飛ばす泥を止める平板状の泥除け板64が、フレーム62,63に連結されている。レーキ状の整地部材65が泥除け板64の前面にボルト連結されており、整地部材65の長孔65aの範囲において、整地部材65の泥除け板64への連結位置を上下に調節することができる。
As shown in FIGS. 5, 7, 9, and 15, a
図5,7,15に示すように、泥除け板64の後側において、縦フレーム61の下面に左右方向のフレーム66が連結されており、レーキ状の2個の整地部材67が整地部材65の両横側に位置するようにフレーム66にボルト連結されている。
整地部材67に4個の長孔67aが備えられている。これにより、整地部材67の長孔67aの範囲において、整地部材67のフレーム66への連結位置を上下に調節することができるのであり、整地部材67の4個の長孔67aのどの長孔67aを使用するかにより、整地部材67のフレーム66への連結位置を左右に調節することができる。
As shown in FIGS. 5, 7, and 15, on the rear side of the
The leveling
[4]
次に、直播装置5に支持されるフロート31,32及び昇降制御について説明する。
図1,2,7に示すように、中央側の右及び左のフロート31、外側の右及び左のフロート32の4個のフロート31,32が備えられており、4個のフロート31,32は同じものに構成されている。
[4]
Next, the
As shown in FIGS. 1, 2, and 7, there are four
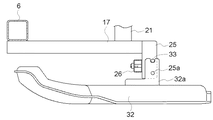
図5,7,9,13に示すように、縦フレーム17の後端部にブラケット25が連結され、板材を折り曲げて構成されたブラケット32aがフロート32の後部に連結されており、ブラケット25に取り付けられた左右方向の支持ピン25aに、フロート32のブラケット32aが取り付けられている。
As shown in FIGS. 5, 7, 9, and 13, the
図7,8,13に示すように、フロート32のブラケット32aの上部に係合するように固定ピン33がブラケット25に取り付けられており、フロート32のブラケット32aの上部と固定ピン33との隙間の小さな範囲で、右及び左のフロート32が上下に揺動自在に支持されている。この場合、フロート32の上下の揺動範囲は、後述するフロート31の上下の揺動範囲よりも小さなものに設定されている。
As shown in FIGS. 7, 8, and 13, a fixing
図12及び図14に示すように、板材を折り曲げて構成されたブラケット31aがフロート31の後部に連結されており、ブラケット25に取り付けられた左右方向の支持ピン25aに、フロート31のブラケット31aが上下に揺動自在に取り付けられている。右のフロート31の前部の左側部にブラケット34が連結され、左のフロート31の前部の右側部にブラケット35が連結されて、ブラケット34,35に亘ってフレーム36が連結されており、右及び左のフロート31がブラケット25の支持ピン25a周りに一体で上下揺動するように支持されている。
As shown in FIGS. 12 and 14, a
図12及び図14に示すように、横フレーム6から後向きに連結された支持部材37にポテンショメータ型式の高さセンサー38が連結されて、高さセンサー38の検出アーム38aが前向きに延出されており、ブラケット35に取り付けられたアーム39と高さセンサー38の検出アーム38aとに亘って、ロッド40が接続されている。横フレーム6に連結されたブラケット6cとフレーム36とに亘って、フロート31を上方側に付勢するバネ41が接続されている。横フレーム6の受け部6aとブラケット34とに亘って、フロート31の下限を決めるワイヤ42が接続されている。
As shown in FIGS. 12 and 14, a potentiometer
以上の構造により、高さセンサー38の検出値が制御装置(図示せず)に入力されており、制御装置は油圧シリンダ4に作動油を給排操作する制御弁(図示せず)を操作する。
田面Gに接地追従するフロート31,32に対して直播装置5が上下動すると、高さセンサー38の検出値に基づいて制御装置により制御弁が操作され、油圧シリンダ4が伸縮作動して、直播装置5が自動的に昇降する。
これにより、直播装置5(縦フレーム17)とフロート31とが図12に示す基準姿勢に維持されるのであり、直播装置5が田面Gから設定高さに維持される(昇降制御)。
With the above structure, the detection value of the
When the
Thereby, the direct sowing apparatus 5 (vertical frame 17) and the
図12に示すように、ブラケット35に1個の第1孔部35aと4個の第2孔部35bとが備えられて、4個の第2孔部35bの高さが少しずつ異なるように配置されている。
アーム39にピン39a及び4個の孔部39bが備えられて、4個の孔部39bがアーム39と平行に配置されている。アーム39のピン39aをブラケット35の第1孔部35aに挿入した状態において、ブラケット35の第2孔部35bの1個とアーム39の孔部39bの1個とを合わせてボルト43を挿入して、ブラケット35にアーム39を連結する。
As shown in FIG. 12, the
The
これにより、図12に示すように、ボルト43を挿入するブラケット35の第2孔部35b及びアーム39の孔部39bを変更することにより、ブラケット35に対するアーム39の連結姿勢を平行、少し上向き、少し下向きに変更することができ、図12に示すフロート31の基準姿勢が平行、少し上向き、少し下向きに設定される。
Thereby, as shown in FIG. 12, by changing the
フロート31の基準姿勢を少し上向きに設定すると、田面Gに対する接地面積が小さくなって、フロート31の田面Gへの接地追従感度が鈍感になり、昇降制御の制御感度が鈍感になる。フロート31の基準姿勢を少し下向きに設定すると、田面Gに対する接地面積が大きくなって、フロート31の田面Gへの接地追従感度が敏感になり、昇降制御の制御感度が敏感になる。
When the reference posture of the
[5]
次に、前ホッパー23及び前繰り出し部20(作業部に相当)の支持構造について説明する。
図5,8,9に示すように、縦フレーム17の後部に上下向きのフレーム21が連結されて、フレーム21の上端部に亘って左右方向の横フレーム22が連結されており、8個の前繰り出し部20が左右方向に所定間隔を置いて並べて横フレーム22に連結されている。2個の前繰り出し部20の上部に亘って前ホッパー23が連結されており、8個の前繰り出し部20に対して4個の同一の前ホッパー23が備えられている。
この場合、8個の前繰り出し部20の上部に亘って、横長の単一の前ホッパー23を連結するように構成してもよい。
[5]
Next, a support structure for the
As shown in FIGS. 5, 8, and 9, a
In this case, a horizontally long single
図5,8,9に示すように、フレーム21の上端部にブラケット21aが連結されて、フレーム21のブラケット21aに支持板24が連結されており、支持板24により前ホッパー23の中央部が下側から支持されている。前ホッパー23の上部の前端部の横軸芯P4周りに蓋部23aが開閉自在に支持されており、前ホッパー23の蓋部23aを開けることにより、直播装置5の後側から前ホッパー23に種籾の補給を行うことができる。
As shown in FIGS. 5, 8, and 9, a
図5,7,8,9に示すように、ブラケット25に亘って左右方向の横フレーム26が連結されている。側面視で三角形状の溝切り板27aの後部に右及び左の縦壁板27bが後向きに連結されて、作溝器27が構成されており、前繰り出し部20の下方に位置するように、8個の作溝器27が左右方向に所定間隔を置いて並べて横フレーム26に連結されている。
As shown in FIGS. 5, 7, 8, and 9, a
図8及び図9に示すように、ブラケット25に上下向きの長孔25bが備えられて、横フレーム26がボルト29によりブラケット25の長孔25bに連結されている。これにより、ブラケット25の長孔25bに沿って横フレーム26の高さを調節して、ボルト29により横フレーム26をブラケット25に連結することによって、8個の作溝器27の高さを同時に変更することができる。この場合、フロート31,32の底面よりも少し下方に作溝器27の下端部が位置するようにして、作溝器27により田面Gに浅い溝が形成されるようにする。
As shown in FIGS. 8 and 9, the
図5及び図8に示すように、板材を断面コ字状に折り曲げて構成された案内部材28が前繰り出し部20の下部に連結されて下方に延出さており、案内部材28の下部が作溝器27の縦壁板27bの間に挿入されている。
As shown in FIGS. 5 and 8, a
これにより図3,4,7に示すように、フロート31,32及び整地部材65,67によって均された田面Gに、後述する[8]に記載の第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15に沿って、作溝器27によって浅い溝が形成されるのであり、前ホッパー23の種籾が前繰り出し部20により繰り出され、案内部材28で囲まれた空間を落下して、第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15に沿って形成された田面Gの浅い溝に供給される。
As a result, as shown in FIGS. 3, 4, and 7, the first, third, fifth, seventh, and ninth described in [8], which will be described later, are applied to the surface G that is leveled by the
[6]
次に、後ホッパー46,47及び後繰り出し部48(作業部に相当)の支持構造について説明する。
図8,9,10,11に示すように、横フレーム8,9に亘って上下向きのフレーム30,44,45が連結されて、枠状のフレームが構成されている。フレーム44にボス部49が連結されており、ボス部49が左の縦フレーム16に連結された支持部材50の横軸芯P6周りに回転自在に支持されている。フレーム45に支持ピン51が連結されており、支持ピン51が右の縦フレーム16に連結された支持部材52の横軸芯P6周りに回転自在に支持されている。
[6]
Next, a support structure for the
As shown in FIGS. 8, 9, 10, and 11,
図5,8,10,11に示すように、7個の後繰り出し部48が左右方向に所定間隔を置いて並べて横フレーム8に連結されており、後繰り出し部48と前繰り出し部20とは同一のものである。中央の3個の後繰り出し部48の上部に亘って、後ホッパー46が連結されている。右の2個の後繰り出し部48及び左の2個の後繰り出し部48の上部に亘って後ホッパー47が連結されて、4個の後繰り出し部48に対して2個の同一の後ホッパー47が備えられており、前ホッパー23と後ホッパー47とは同一のものである。
この場合、7個の後繰り出し部48の上部に亘って、横長の単一の後ホッパー46を連結するように構成してもよい。
As shown in FIGS. 5, 8, 10, and 11, seven
In this case, a horizontally long single
図5,8,9,10,11に示すように、フレーム30の上端部にブラケット30aが連結されて、フレーム30のブラケット30aに支持板24が連結されており、支持板24により後ホッパー46,47の中央部が下側から支持されている。後ホッパー46,47の上部の前端部の横軸芯P5周りに蓋部46a,47aが開閉自在に支持されており、後ホッパー46,47の蓋部46a,47aを開けることにより、直播装置5の後側から後ホッパー46,47に種籾の補給を行うことができる。
As shown in FIGS. 5, 8, 9, 10, and 11, a
図5,7,8,9に示すように、横フレーム9の右及び左側部の2個のブラケット53が連結され、ブラケット53に亘って左右方向の横フレーム54が連結されている。側面視で三角形状の溝切り板55aの後部に右及び左の縦壁板55bが後向きに連結されて、作溝器55が構成されており、後繰り出し部48の下方に位置するように、7個の作溝器55が左右方向に所定間隔を置いて並べて横フレーム54に連結されている。
As shown in FIGS. 5, 7, 8, and 9, two
図8及び図9に示すように、ブラケット53に上下向きの長孔53aが備えられて、横フレーム54がボルト56によりブラケット53の長孔53aに連結されている。これにより、ブラケット53の長孔53aに沿って横フレーム54の高さを調節して、ボルト56により横フレーム54をブラケット53に連結することによって、7個の作溝器55の高さを同時に変更することができる。
As shown in FIGS. 8 and 9, the
この場合、ブラケット53の長孔53aがプラケット25の長孔25bよりも長いものに設定されており、作溝器55の高さの調節範囲が作溝器27の高さの調節範囲よりも大きなものに設定されている。
リンク機構3や直播装置5の全体のたわみ等により直播装置5が後下がり気味になり、作溝器55の高さが作溝器27の高さよりも低くなる傾向があるので、フロート31,32の底面よりも少し下方に作溝器27の下端部が位置するように、作溝器27の高さを設定した後、作溝器27と同じ高さになるように作溝器55の高さを設定する。このように作溝器27と同じ高さになるように作溝器55の高さを設定する際に、作溝器55の高さの調節範囲が大きいことが有効となる。
In this case, the
The
図5及び図8に示すように、板材を断面コ字状に折り曲げて構成された案内部材57が後繰り出し部48の下部に連結されて下方に延出さており、案内部材57の下部が作溝器55の縦壁板55bの間に挿入されている。
As shown in FIGS. 5 and 8, a
これにより、図3,4,7に示すように、フロート31,32及び整地部材65,67によって均された田面Gに、後述する[8]に記載の第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14に沿って、作溝器55によって浅い溝が形成されるのであり、後ホッパー46,47の種籾が後繰り出し部48により繰り出され、案内部材57で囲まれた空間を落下して、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14に沿って形成された田面Gの浅い溝に供給される。
As a result, as shown in FIGS. 3, 4, and 7, the surface G leveled by the
[7]
次に、後ホッパー46,47及び後繰り出し部48の姿勢変更について説明する。
図8,10,11に示すように、フレーム44に連結されたボス部49が、左の縦フレーム16に連結された支持部材50の横軸芯P6周りに回転自在に支持され、フレーム45に連結された支持ピン51が、右の縦フレーム16に連結された支持部材52の横軸芯P6周りに回転自在に支持されている(前項[6]参照)。
[7]
Next, the posture change of the
As shown in FIGS. 8, 10, and 11, the
これにより、図5及び図8に示すように、3個の後ホッパー46,47、7個の後繰り出し部48、7個の作溝器55及び7個の案内部材57等が、一体のユニットとして横フレーム8,9に支持された状態で、ボス部49及び支持ピン51により支持部材50,52に、横軸芯P6周りに揺動自在に支持された状態となっている。
As a result, as shown in FIGS. 5 and 8, the three
図8,10,11に示すように、横フレーム9の右及び左端部にブラケット9aが連結されて、連結ピン58が横フレーム9のブラケット9aに左右方向にスライド自在及び左右方向の横軸芯周りに回転自在に支持されており、連結ピン58を横外側の突出側に付勢するバネ59が備えられている。
As shown in FIGS. 8, 10, and 11,
図5,8,10,11に示す状態は、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57が起立した作業姿勢であり、縦フレーム16の後端部に連結された係合部16bの開口に連結ピン58を挿入した状態であり、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57が連結ピン58により作業姿勢に固定された状態である。作業姿勢において、後繰り出し部48が前繰り出し部20と同じ高さに配置されるのであり、後ホッパー46,47が前ホッパー23と同じ高さに配置される。
5, 8, 10, and 11 are working postures in which the
作業姿勢において、前項[6]に記載のように、フロート31,32及び整地部材65,67によって均された田面Gに、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14に沿って、作溝器55によって浅い溝が形成されるのであり、後ホッパー46,47の種籾が後繰り出し部48により繰り出され、案内部材57で囲まれた空間を落下して、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14に沿って形成された田面Gの浅い溝に供給される。
In the working posture, as described in [6], the second, fourth, sixth, eighth, tenth, twelfth, and fourteenth supply lines L2 are provided on the surface G leveled by the
図6に示すように、縦フレーム16の係合部16bから連結ピン58を抜くことによって、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57を横軸芯P6周りに後方に倒すことができる。
左の縦フレーム16の後端部に連結された支持板16cにフレーム44を当てて、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57の重量を左の縦フレーム16の支持板16cに支持させることにより、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57を後方に倒れた非作業姿勢とすることができる。
As shown in FIG. 6, by removing the connecting
The
図6に示す非作業姿勢の状態から、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57を上方に持ち上げることにより、図5に示す作業姿勢に戻すことができる。
図10に示すように、横フレーム8,9を図5及び図6の紙面反時計方向に付勢するバネ60が、ボス部49に外嵌されて支持部材50とフレーム44とに亘って取り付けられており、後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57を上方に持ち上げる際に、バネ60の付勢力が補助となる。
From the state of the non-working posture shown in FIG. 6, the
As shown in FIG. 10, a
[8]
次に、前及び後繰り出し部20,48の配置について説明する(その1)。
図3,4,7に示すように、前後方向に沿った15個の第1〜15供給ラインL1〜L15が、左右方向に所定間隔W1を置いて田面Gに設定されており、左端部の供給ラインを第1供給ラインL1として、右側に第2〜15供給ラインL2〜L15が設定されている。この場合、隣接する供給ラインの間隔(所定間隔W1)は、150mm程度に設定されている。
[8]
Next, the arrangement of the front and
As shown in FIGS. 3, 4, and 7, fifteen first to fifteen supply lines L <b> 1 to L <b> 15 along the front-rear direction are set on the surface G with a predetermined interval W <b> 1 in the left-right direction, The supply line is the first supply line L1, and the second to fifteenth supply lines L2 to L15 are set on the right side. In this case, the interval (predetermined interval W1) between adjacent supply lines is set to about 150 mm.
図3,4,7に示すように、8個の前繰り出し部20が、第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15(奇数番目の供給ライン)の上方に位置するように、左右方向に所定間隔を置いて並べて配置されている。8個の作溝器27が、第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15(奇数番目の供給ライン)の位置に配置されている。
As shown in FIGS. 3, 4, and 7, the eight forward feeding
図3,4,7に示すように、前繰り出し部20の後側において、7個の後繰り出し部48が、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14(偶数番目の供給ライン)の上方に位置するように、左右方向に所定間隔を置いて並べて配置されている。7個の作溝器55が、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14(偶数番目の供給ライン)の位置に配置されている。
As shown in FIGS. 3, 4, and 7, on the rear side of the
以上の構造により、図3,4,7に示すように、隣接する前繰り出し部20の間隔が、隣接する供給ラインの間隔(所定間隔W1)の2倍になるのであり、隣接する後繰り出し部48の間隔が、隣接する供給ラインの間隔(所定間隔W1)の2倍になる。
前及び後繰り出し部20,48が前後方向視において左右方向にずれることになるのであり、前後方向視において前繰り出し部20の間に、後繰り出し部48が位置する状態となる。この場合に、前繰り出し部20の数と後繰り出し部48の数との差が1個であるので、前後方向視において隣接する前繰り出し部20の間の全てに、後繰り出し部48が配置されている。
With the above structure, as shown in FIGS. 3, 4, and 7, the interval between the adjacent
The front and
図3,4,7に示すように、機体及び直播装置5の左右方向での中心CLが第8供給ラインL8の位置となって、4番目の後繰り出し部48(第8供給ラインL8)が中心CLに位置し、4番目の前繰り出し部20(第7供給ラインL7)と、5番目の前繰り出し部20(第9供給ラインL9)との間に、中心CLが位置する。
これにより、中央の供給ライン(第8供給ラインL8)の右及び左側に同数の前繰り出し部20が左右対称に配置されるのであり、中央の供給ライン(第8供給ラインL8)に中央の後繰り出し部48が配置され、中央の後繰り出し部48の右及び左側に同数の後繰り出し部48が左右対称に配置される状態となる。
As shown in FIGS. 3, 4, and 7, the center CL in the left-right direction of the machine body and the
As a result, the same number of
[9]
次に、前及び後繰り出し部20,48の配置について説明する(その2)。
図3及び図7に示すように、右の後輪2の後方の位置で右の後輪2の通過軌跡を通過する位置に6番目の後繰り出し部48(第12供給ラインL12)(特定の作業部に相当)が位置しており、左の後輪2の後方の位置で左の後輪2の通過軌跡を通過する位置に2番目の後繰り出し部48(第4供給ラインL4)(特定の作業部に相当)が位置している。
[9]
Next, the arrangement of the front and
As shown in FIGS. 3 and 7, the sixth rear feed portion 48 (the twelfth supply line L <b> 12) (the specific feed line L <b> 12) is located at a position behind the right
図3及び図7に示すように、7,8番目の前繰り出し部20(第13,15供給ラインL13,L15)(右端部の作業部に相当)、及び、7番目の後繰り出し部48(第14供給ラインL14)(右端部の作業部に相当)が、右の後輪2の後方位置(第12供給ラインL12)に対して右横外側に位置している。 As shown in FIG. 3 and FIG. 7, the seventh and eighth forward feed portions 20 (the thirteenth and fifteenth supply lines L13 and L15) (corresponding to the working portion at the right end) and the seventh rear feed portion 48 ( The fourteenth supply line L14) (corresponding to the working portion at the right end) is located on the right lateral outer side with respect to the rear position of the right rear wheel 2 (the twelfth supply line L12).
図3及び図7に示すように、1,2番目の前繰り出し部20(第1,3供給ラインL1,L3)(左端部の作業部に相当)、及び、1番目の後繰り出し部48(第2供給ラインL2)(左端部の作業部に相当)が、左の後輪2の後方位置(第4供給ラインL4)に対して左横外側に位置している。 As shown in FIG. 3 and FIG. 7, the first and second forward feed portions 20 (first and third supply lines L1 and L3) (corresponding to the left end working portion), and the first rear feed portion 48 ( The second supply line L2) (corresponding to the working portion at the left end) is located on the left lateral outer side with respect to the rear position of the left rear wheel 2 (fourth supply line L4).
図3及び図7に示すように、右の後輪2の後方位置(第12供給ラインL12)と左の後輪2の後方位置(第4供給ラインL4)との間に、3,4,5,6番目の前繰り出し部20(第5,7,9,11供給ラインL5,L7,L9,L11)、並びに、3,4,5番目の後繰り出し部48(第6,8,10供給ラインL6,L8,L10)が位置している。 As shown in FIGS. 3 and 7, between the rear position of the right rear wheel 2 (the twelfth supply line L12) and the rear position of the left rear wheel 2 (the fourth supply line L4), 3, 4, 5th and 6th forward feed sections 20 (5th, 7th, 9th and 11th supply lines L5, L7, L9 and L11) and 3rd, 4th and 5th rear feed sections 48 (6th, 8th and 10th supplies) Lines L6, L8, L10) are located.
[10]
次に、前及び後繰り出し部20,48への伝動構造について説明する。
図4,5,9に示すように、横フレーム6の中央部の上部に、ボス部68が支持部材78を介して前後向きに連結されて、ボス部68の後端部にベベルギヤケース69が連結されており、横フレーム22の左端部及び支持部材50に亘って平板状の支持板70が連結されている。ボス部68に入力軸71が回転自在に支持されており、機体の前部に備えられたエンジン7の動力が伝動軸95を介して入力軸71に伝達されている。
[10]
Next, the transmission structure to the front and
As shown in FIGS. 4, 5, and 9, a
図4及び図5に示すように、ベベルギヤケース69と支持板70とに亘って伝動軸72が架設されており、ベベルギヤケース69において、入力軸71に固定されたベベルギヤ71aと、伝動軸72に固定されたベベルギヤ72aとが咬合している。支持板70及び前繰り出し部20に亘って左右方向に1本の伝動軸73が架設されており、支持板70側において、伝動軸72に固定されたスプロケット72bと、伝動軸73に固定されたスプロケット73dとに亘って伝動チェーン74が架設されている。
As shown in FIGS. 4 and 5, a
図4,5,8,10に示すように、ボス部49の内部及び後繰り出し部48に亘って左右方向に1本の伝動軸75が架設されて、支持板70の後部の開口部70aにボス部49及び伝動軸75が挿入されており、支持板70側において、伝動軸73に固定されたスプロケット73eと、伝動軸75に固定されたスプロケット75dとに亘って伝動チェーン76が架設されている。
As shown in FIGS. 4, 5, 8, and 10, one
図4,8,10に示すように、伝動軸72のスプロケット72b、伝動軸73のスプロケット73d,73e、伝動軸75のスプロケット75d、伝動チェーン74,76等を覆うカバー77が、支持板70に連結されている。
図5,10,11に示すように、伝動軸75が横軸芯P6(ボス部49及び支持ピン51)と同芯状に配置されているので、前項[7]に記載のように後ホッパー46,47、後繰り出し部48、作溝器55及び案内部材57を作業及び非作業姿勢に操作しても、伝動軸75等に無理は生じない。
As shown in FIGS. 4, 8, and 10, a
As shown in FIGS. 5, 10, and 11, since the
図4及び図8に示すように、8個の前繰り出し部20の各々に対応するように、8個の出力ギヤ73aが伝動軸73に相対回転自在に外嵌されて、8個のクラッチ部材73bが伝動軸73に一体回転及びスライド自在に外嵌されており、クラッチ部材73bを出力ギヤ73aとの咬合側に付勢するバネ73cが、伝動軸73に外嵌されている。前繰り出し部20の入力ギヤ20aが前繰り出し部20の左側面に備えられており、前繰り出し部20の入力ギヤ20aと伝動軸73の出力ギヤ73aとが咬合している。
As shown in FIGS. 4 and 8, eight
図4,10,11に示すように、7個の後繰り出し部48の各々に対応するように、7個の出力ギヤ75aが伝動軸75に相対回転自在に外嵌されて、7個のクラッチ部材75bが伝動軸75に一体回転及びスライド自在に外嵌されており、クラッチ部材75bを出力ギヤ75aとの咬合側に付勢するバネ75cが、伝動軸75に外嵌されている。後繰り出し部48の入力ギヤ48aが後繰り出し部48の左側面に備えられており、後繰り出し部48の入力ギヤ48aと伝動軸75の出力ギヤ75aとが咬合している。
As shown in FIGS. 4, 10, and 11, seven output gears 75 a are externally fitted to the
以上の構造により図4に示すように、エンジン7の動力が入力軸71、伝動軸72及び伝動チェーン74を介して伝動軸73に伝達されるのであり、伝動チェーン76を介して伝動軸75に伝達される。
伝動軸73,75のクラッチ部材73b,75bが出力ギヤ73a,75aに咬合した伝動状態において、伝動軸73,75の動力が伝動軸73,75の出力ギヤ73a,75aから前繰り出し部20の入力ギヤ20a(後繰り出し部48の入力ギヤ48a)に伝達されて、前繰り出し部20(後繰り出し部48)が作動する(作動状態)。
With the above structure, as shown in FIG. 4, the power of the
In a transmission state in which the
[11]
次に、前及び後繰り出し部20,48の作動及び停止状態に操作する構造について説明する(少数条クラッチとしての機能)。
図4に示すように、前繰り出し部20に亘って左右方向に1本の操作軸79が回転自在に架設されており、伝動軸73のクラッチ部材73bに対応するように、8個のカム部材79aが操作軸79に連結されている。操作軸79の右端部にレバー状の操作具80が連結されており、円板状の操作具ガイド81が横フレーム22の右端部に連結されている。
[11]
Next, a structure for operating the front and
As shown in FIG. 4, one
図4,10,11に示すように、後繰り出し部48に亘って左右方向に1本の操作軸82が回転自在に架設されており、伝動軸75のクラッチ部材75bに対応するように、7個のカム部材82aが操作軸82に連結されている。操作軸82の右端部にレバー状の操作具83が連結されており、円板状の操作具ガイド84が横フレーム8の右端部に連結されている。
As shown in FIGS. 4, 10, and 11, one
以上の構造により、操作具80,83により操作軸79,82を回転操作することにより、後述するように操作軸79,82のカム部材79a,82aによって、伝動軸73,75のクラッチ部材73b,75bがバネ73c,75cに抗して出力ギヤ73a,75aから離し操作されて遮断状態となり、前及び後繰り出し部20,48が停止する(停止状態)。
With the above structure, the
操作具80及び操作具ガイド81は、以下に示す第1〜8位置を備えている。
第1位置(全ての前繰り出し部20が作動状態)。
第2位置(1,2番目の前繰り出し部20(第1,3供給ラインL1,L3)が停止状態で、これ以外の前繰り出し部20が作動状態)。
第3位置(1〜4番目の前繰り出し部20(第1,3,5,7供給ラインL1,L3,L5,L7)が停止状態で、これ以外の前繰り出し部20が作動状態)。
第4位置(1〜6番目の前繰り出し部20(第1,3,5,7,9,11供給ラインL1,L3,L5,L7,L9,L11)が停止状態で、これ以外の前繰り出し部20が作動状態)。
第5位置(7,8番目の前繰り出し部20(第13,15供給ラインL13,L15)が停止状態で、これ以外の前繰り出し部20が作動状態)。
第6位置(5〜8番目の前繰り出し部20(第9,11,13,15供給ラインL9,L11,L13,L15)が停止状態で、これ以外の前繰り出し部20が作動状態)。
第7位置(3〜8番目の前繰り出し部20(第5,7,9,11,13,15供給ラインL5,L7,L9,L11,L13,L15)が停止状態で、これ以外の前繰り出し部20が作動状態)。
第8位置(全ての前繰り出し部20が停止状態)。
The
1st position (all the
Second position (1st and 2nd pre-feeding portions 20 (first and third supply lines L1 and L3) are in a stopped state, and other
3rd position (1st-4th front extension part 20 (1st, 3, 5, 7 supply line L1, L3, L5, L7) is a stop state, and other
The fourth position (the first to sixth pre-feeding portions 20 (first, third, fifth, seventh, ninth, and eleventh supply lines L1, L3, L5, L7, L9, and L11) is in a stopped state, and other pre-feeding operations are performed.
The fifth position (the seventh and eighth pre-feeding portions 20 (the thirteenth and fifteenth supply lines L13 and L15) are stopped, and the other
Sixth position (5th to 8th pre-feeding portions 20 (9th, 11th, 13th, 15th supply lines L9, L11, L13, L15) are in a stopped state, and the other
The seventh position (the third to eighth pre-feeding portions 20 (the fifth, seventh, ninth, eleventh, thirteenth and fifteenth supply lines L5, L7, L9, L11, L13, and L15) is in a stopped state, and other pre-feeding operations are performed.
8th position (all the
操作具83及び操作具ガイド84は、以下に示す第1〜8位置を備えている。
第1位置(全ての後繰り出し部48が作動状態)。
第2位置(1,2番目の後繰り出し部48(第2,4供給ラインL2,L4)が停止状態で、これ以外の後繰り出し部48が作動状態)。
第3位置(1〜4番目の後繰り出し部48(第2,4,6,8供給ラインL2,L4,L6,L8)が停止状態で、これ以外の後繰り出し部48が作動状態)。
第4位置(1〜5番目の後繰り出し部48(第2,4,6,8,10供給ラインL2,L4,L6,L8,L10)が停止状態で、これ以外の後繰り出し部48が作動状態)。
第5位置(6,7番目の後繰り出し部48(第12,14供給ラインL12,L14)が停止状態で、これ以外の後繰り出し部48が作動状態)。
第6位置(5〜7番目の後繰り出し部48(第10,12,14供給ラインL10,L12,L14)が停止状態で、これ以外の後繰り出し部48が作動状態)。
第7位置(3〜7番目の前繰り出し部20(第6,8,10,12,14供給ラインL6,L8,L10,L12,L14)が停止状態で、これ以外の後繰り出し部48が作動状態)。
第8位置(全ての後繰り出し部48が停止状態)。
The
1st position (all the
Second position (the first and second rear feed portions 48 (second and fourth supply lines L2 and L4) are stopped, and the other
3rd position (The 1st-4th back extension part 48 (2nd, 4, 6, 8 supply line L2, L4, L6, L8) is a stop state, and the other
The fourth position (the 1st to 5th post-feeding portions 48 (the second, fourth, sixth, eighth, and tenth supply lines L2, L4, L6, L8, and L10) are stopped, and the other
5th position (The 6th and 7th back extension parts 48 (the 12th and 14th supply lines L12 and L14) are in a stop state, and other
Sixth position (the fifth and seventh rear feed portions 48 (the tenth, twelfth, and fourteenth supply lines L10, L12, and L14) are stopped, and the other
The seventh position (the third to seventh pre-feeding sections 20 (the sixth, eighth, tenth, twelfth and fourteenth supply lines L6, L8, L10, L12, and L14) is stopped, and the other
Eighth position (all
通常の状態では、操作具80,83を第1位置に操作しておき、全ての前及び後繰り出し部20,48を作動状態としておく。種籾を部分的に田面Gに供給しない場合、操作具80を第2位置に操作すれば、操作具83も第2位置に操作するというように、操作具80,83を同じ位置に操作するのであり、前及び後繰り出し部20,48の停止状態は前述のとおりである。
In a normal state, the
[12]
次に、溝切り器87について説明する。
図5及び図7に示すように、右及び左の後輪2の後方位置で、且つ、平面視で特定の後繰り出し部48(第4及び第12供給ラインL4,L12)の前方位置(前繰り出し部20(前ホッパー23)よりも前側)に、溝切り器87が配置されている。
[12]
Next, the
As shown in FIGS. 5 and 7, the rear position of the right and left
図5,15,16に示すように、溝切り器87は、断面が下向きに凸の三角形状を備えた中央部87aと、中央部87aの右及び左側に横向きに延出された平板状の横側部87bとを備えて構成されており、フレーム62の下端部の横軸芯P7周りに上下に揺動自在に支持されている。溝切り器87の中央部87aに対する横側部87bの位置が、横軸芯P7周りに上下に変更可能に構成されており、ボルト88により横側部87bを中央部87aに固定する。
As shown in FIGS. 5, 15, and 16, the grooving
図5及び図7に示すように、溝切り器87の中央部87aの前部が整地部材65の後方に位置して、溝切り器87の中央部87aの後部がフロート31,32の間に位置している。溝切り器87の横側部87bが整地部材67の後方に位置し、フロート31,32の前側に位置している。
これにより、溝切り器87の中央部87aにより田面Gに排水用の溝Mを形成するのであり、排水用の溝Mの右及び左横側に盛り上がる泥を、溝切り器87の横側部87bで押圧して平滑にする。
As shown in FIGS. 5 and 7, the front portion of the
Thus, the drainage groove M is formed on the surface G by the
[13]
次に、溝切り器87を作用及び退避姿勢に姿勢変更する構造について説明する。
図5,8,19に示すように、横フレーム12において溝切り器87の上方に位置する部分に、一対の支持板90が連結されて前方に延出されている。支持板90の前部の間に亘ってピン90aが連結されており、支持板90の前部の間に亘ってピン90bが挿入されて、ピン90bが支持板90の両方の横外側に突出している。
[13]
Next, a structure for changing the posture of the
As shown in FIGS. 5, 8, and 19, a pair of
図18及び図19に示すように、支持板90においてピン90aと横フレーム12との間の部分に長孔90cが形成されて、支持板90の長孔90cに亘ってピン89が挿入されており、ピン89が支持板90の長孔90cに沿って移動自在に支持されている。支持板90の両方の横外側において、一対のバネ91が支持板90のピン90bとピン89とに亘って接続されており、バネ91によりピン89が支持板90のピン90a側に付勢されている。
As shown in FIGS. 18 and 19, a
図1,2,3に示すように、操作ロッド92(操作機構に相当)が直播装置5の前部の右及び左側部に上下方向に配置されており、図5,18,19に示すように、操作ロッド92が支持板90の間で、支持板90のピン90aとピン89との間に挿入されている。
操作ロッド92の上部が斜め前方の上方に延出されており、操作ロッド92の上端部の持ち手部92aが側面視で、前及び後ホッパー23,46,47(蓋部23a,46a,47a)よりも上方に位置し、ヒッチフレーム14の上部よりも上方に位置している。
As shown in FIGS. 1, 2, and 3, an operating rod 92 (corresponding to an operating mechanism) is vertically arranged on the right and left sides of the front portion of the
The upper portion of the operating
図5,15,16に示すように、操作ロッド92の下部が溝切り器87の中央部87aの後部に開口に挿入されて、操作ロッド92の下部にナット93が取り付けられており、操作ロッド92に固定されたバネ受け92bと溝切り器87の中央部87aとの間に、バネ94が圧縮された状態で操作ロッド92に外嵌されている。これにより、ナット93及びバネ94によって、操作ロッド92の下部が溝切り器87の中央部87aの後部に接続されている。
As shown in FIGS. 5, 15, and 16, the lower portion of the
図5,8,19に示すように、操作ロッド92の中間部に平板状の係合部材96が上下向きに連結されて、係合部材96が支持板90の間で支持板90のピン90aとピン89との間に挿入されている。係合部材96の上下に凹部状の係合部96a,96bが形成されている。
As shown in FIGS. 5, 8, and 19, a
図17(B)に示す状態は、操作ロッド92を上方に操作して、操作ロッド92(係合部材96)の下側の係合部96aを支持板90のピン90aに係合させた状態である(第1状態)。この状態において、バネ91及びピン89により操作ロッド92(係合部材96)が支持板90のピン90aに押し付けられて、操作ロッド92(係合部材96)の下側の係合部96aが支持板90のピン90aから外れない状態となる。
図17(B)に示す操作ロッド92の第1状態において、操作ロッド92により溝切り器87が横軸芯P7周りに上方に操作されて、田面Gから上方に離れた退避姿勢となる。
In the state shown in FIG. 17B, the operating
In the first state of the operating
図17(A)に示す状態は、操作ロッド92を下方に操作して、操作ロッド92(係合部材96)の上側の係合部96bを支持板90のピン90aに係合させた状態である(第2状態)。この状態において、バネ91及びピン89により操作ロッド92(係合部材96)が支持板90のピン90aに押し付けられて、操作ロッド92(係合部材96)の上側の係合部96bが支持板90のピン90aから外れない状態となる。
図17(A)に示す操作ロッド92の第2状態において、操作ロッド92により溝切り器87が横軸芯P7周りに下方に操作されて、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)に対応する田面Gに接地して排水用の溝Mを形成する作用姿勢となる。
The state shown in FIG. 17A is a state in which the operating
In the second state of the
図17(A)に示すように、作用姿勢の溝切り器87において、ナット93により溝切り器87の下限位置が決められるのであり、溝切り器87の上方への揺動がバネ94の圧縮により許容される。操作ロッド92に対するナット93の位置を上下に変更することにより、溝切り器87の下限位置を上下に変更することができる。
As shown in FIG. 17 (A), in the
図1,2,3,5に示すように、操作ロッド92の上部が斜め前方の上方に延出されており、操作ロッド92の上端部の持ち手部92aが側面視で、前及び後ホッパー23,46,47(蓋部23a,46a,47a)よりも上方に位置し、ヒッチフレーム14の上部よりも上方に位置していることにより、機体の運転者が後方に手を伸ばすことにより、操作ロッド92の持ち手部92aを容易に持つことができる。操作ロッド92の持ち手部92aを持ち、バネ91に抗して操作ロッド92を後方に操作して、操作ロッド92(係合部材96)の係合部96a,96bを支持板90のピン90aから外すことにより、操作ロッド92を上下方向に操作して第1及び第2状態に操作することができる。
As shown in FIGS. 1, 2, 3 and 5, the upper portion of the operating
この場合、右及び左の溝切り器87の各々に操作ロッド92が備えられているので、右及び左の溝切り器87を作用姿勢に操作したり、右及び左の溝切り器87を退避姿勢に操作したり、右の溝切り器87を作用姿勢に操作し、左の溝切り器87を退避姿勢に操作したり、左の溝切り器87を作用姿勢に操作し、右の溝切り器87を退避姿勢に操作したりすることができる。
In this case, since the
[14]
次に、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)と溝切り器87との関係について説明する(その1)。
図4,7,10に示すように、横フレーム9において、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)のクラッチ部材75bに対応する部分に、ガイド部材97が連結されている。丸棒材を折り曲げて構成された操作部材98が、ガイド部材97により伝動軸75と平行に左右方向に移動自在に支持されており、操作部材98の一端が特定の後繰り出し部48(第4及び第12供給ラインL4,L12)のクラッチ部材75bに係合している。
[14]
Next, the relationship between the specific post-feeding portion 48 (fourth and twelfth supply lines L4 and L12) and the
As shown in FIGS. 4, 7, and 10, in the
図7及び図10に示すように、横フレーム9におけるガイド部材97の近傍部分に受け部材9bが連結されている。ワイヤ99のアウター99bの一端が横フレーム9の受け部材9bに左右方向に向けて連結されており、ワイヤ99のインナー99aの一端が左右方向に延出されて操作部材98に接続されている。
As shown in FIGS. 7 and 10, the receiving
これにより、図7及び図10に示すように、ワイヤ99のインナー99a及び操作部材98が左右方向に移動する状態となるのであり、ワイヤ99のインナー99a及び操作部材98の移動方向が、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)のクラッチ部材75bにおける伝動及び遮断状態のスライド方向(操作方向)と平行な状態(沿った状態)となる。
As a result, as shown in FIGS. 7 and 10, the inner 99a and the
図5,17(A)(B),18,19に示すように、横フレーム12における支持板90の近傍部分に、受け部材12aが連結されており、ワイヤ99のアウター99bの他端が横フレーム12の受け部材12aに下向きに連結されている。ワイヤ99のインナー99aの他端が下方に延出されており、操作ロッド92に連結されたピン92cと、ワイヤ99のインナー99aの他端とが、融通用のバネ100を介して接続されている。
As shown in FIGS. 5, 17 (A) (B), 18, 19, the receiving
以上の構造により、図7に示すように、特定の後繰り出し部48(第4供給ラインL4)と、特定の後繰り出し部48(第4供給ラインL4)の前方に位置する操作ロッド92(溝切り器87)とがワイヤ99により接続される。
ワイヤ99は、操作ロッド92(横フレーム12の受け部材12a)から上方に延出されて、円弧状に曲がりながら下方に延出され、円弧状に曲がりながら左の横外側に延出されて、平面視で左の横向きに突出する円弧状となるように曲がりながら、1番目の前繰り出し部20(第1供給ラインL1)の左の横外側を通過して、特定の後繰り出し部48(第4供給ラインL4)のクラッチ部材75b(操作部材98)に接続されている。
With the above structure, as shown in FIG. 7, a specific rear extension 48 (fourth supply line L4) and an operation rod 92 (groove) positioned in front of the specific rear extension 48 (fourth supply line L4). The cutting device 87) is connected to the
The
以上の構造により、図7に示すように、特定の後繰り出し部48(第12供給ラインL12)と、特定の後繰り出し部48(第12供給ラインL12)の前方に位置する操作ロッド92(溝切り器87)とがワイヤ99により接続される。
ワイヤ99は、操作ロッド92(横フレーム12の受け部材12a)から上方に延出されて、円弧状に曲がりながら下方に延出され、円弧状に曲がりながら左の横外側に延出されて、平面視で左の横向きに突出する円弧状となるように曲がりながら、4番目及び5番目の前繰り出し部20(第7及び第9供給ラインL7,L9)の間を通過して、特定の後繰り出し部48(第12供給ラインL12)のクラッチ部材75b(操作部材98)に接続されている。
With the above structure, as shown in FIG. 7, the specific rear extension 48 (the twelfth supply line L12) and the operation rod 92 (groove) positioned in front of the specific rear extension 48 (the twelfth supply line L12). The cutting device 87) is connected to the
The
[15]
次に、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)と溝切り器87との関係について説明する(その2)。
前項[13][14]に記載の構造により、図7及び図17(B)に示すように、操作ロッド92を第1状態に操作すると、操作ロッド92により溝切り器87が横軸芯P7周りに上方に操作されて退避姿勢となる。
[15]
Next, the relationship between the specific post-feeding portion 48 (fourth and twelfth supply lines L4, L12) and the
When the operating
図7及び図17(B)に示すように、操作ロッド92を第1状態に操作すると、これと同時にワイヤ99のインナー99aが操作部材98側に戻し操作されて、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)のクラッチ部材75bが、伝動軸75のバネ75cにより伝動状態となる(特定の後繰り出し部48(第4及び第12供給ラインL4,L12)の作動状態)。
第1状態において前項[11]に記載のように、操作具80,83を第1〜8位置に操作することにより、前項[11]に記載の第1〜8位置の状態が得られる。
As shown in FIGS. 7 and 17B, when the operating
As described in the previous item [11] in the first state, the states of the first to eighth positions described in the previous item [11] are obtained by operating the
前項[13][14]に記載の構造により、図7及び図17(A)に示すように、操作ロッド92を第2状態に操作すると、操作ロッド92により溝切り器87が横軸芯P7周りに下方に操作されて作用姿勢となる。
操作ロッド92を第2状態に操作すると、これと同時にワイヤ99のインナー99aが操作ロッド92側に引き操作されて、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)のクラッチ部材75bが遮断状態となる(特定の後繰り出し部48(第4及び第12供給ラインL4,L12)の停止状態)。
When the operating
When the
前項[11]に記載のように、操作具80,83を第1位置に操作した状態(全ての前及び後繰り出し部20,48が作動状態)において、操作ロッド92を第2状態に操作すると、全ての前繰り出し部20(第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15)の作動状態、並びに、1,3,4,5,7番目の後繰り出し部48(第2,6,8,10,14供給ラインL2,L6,L8,L10,L14)の作動状態において、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)が停止状態となる。
第2状態において前項[11]に記載のように、操作具80,83を第1〜8位置に操作すると、前項[11]に記載の第1〜8位置の各々の状態において、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)が停止状態となる。
As described in [11] above, when the
When the
[16]
次に、前及び後繰り出し部20,48の繰り出し量の調節構造について説明する。
図4及び図8に示すように、前繰り出し部20の繰り出し量を調節する調節ギヤ20bが、前繰り出し部20の右側面に備えられている。前繰り出し部20に亘って左右方向に1本の操作軸85が回転自在及び軸芯方向にスライド自在に架設されており、前繰り出し部20の調節ギヤ20bに対応するように、8個の調節ギヤ85aが操作軸85に連結されている。操作軸85の右端部にハンドル部85bが備えられており、通常の状態では、前繰り出し部20の調節ギヤ20bと操作軸85の調節ギヤ85aとは咬合していない。
[16]
Next, a structure for adjusting the feed amount of the front and
As shown in FIGS. 4 and 8, an
図4,8,10,11に示すように、後繰り出し部48の繰り出し量を調節する調節ギヤ48bが、後繰り出し部48の右側面に備えられている。後繰り出し部48に亘って左右方向に1本の操作軸86が回転自在及び軸芯方向にスライド自在に架設されており、後繰り出し部48の調節ギヤ48bに対応するように、7個の調節ギヤ86aが操作軸86に連結されている。操作軸86の右端部にハンドル部86bが備えられており、通常の状態では、後繰り出し部48の調節ギヤ48bと操作軸86の調節ギヤ86aとは咬合していない。
As shown in FIGS. 4, 8, 10, and 11, an
以上の構造により、前及び後繰り出し部20,48の繰り出し量を調節する場合、操作軸85,86を右方にスライド操作して、操作軸85,86の調節ギヤ85a,86aを前及び後繰り出し部20,48の調節ギヤ20b,48bに咬合させる。
この後、操作軸85,86のハンドル部85b,86bにより操作軸85,86を回転操作して、前及び後繰り出し部20,48の調節ギヤ20b,48bを回転させて、前及び後繰り出し部20,48の繰り出し量を調節する。この場合、全ての前繰り出し部20の繰り出し量を同時に調節することができるのであり、全ての後繰り出し部48の繰り出し量を同時に調節することができる。
With the above structure, when adjusting the feed amounts of the front and
Thereafter, the operating
[17]
次に、乗用型直播機の作業形態について説明する。
例えば図20に示すように、平面視で四角形の水田において、乗用型直播機は以下のような作業形態を採用することがある。
[17]
Next, an operation mode of the riding type direct seeder will be described.
For example, as shown in FIG. 20, a riding type direct sowing machine may adopt the following working mode in a square paddy field in plan view.
最初に図20に示す位置K1に機体を位置させて、直播装置5を田面Gに下降させ、直播装置5を作動状態として作業行程L01に入る。作業行程L01において、左のマーカー18を格納姿勢に操作し、右のマーカー18を作用姿勢に操作して機体を走行させることにより、直播作業を行いながら、右のマーカー18により次の作業行程L02の指標を田面Gに形成する。
First, the machine body is positioned at a position K1 shown in FIG. 20, the
図20に示すように作業行程L01から機体が畦際に達すると、直播装置5を停止状態として田面Gから上昇させて、旋回LL1(右方向)を行い、直播装置5を田面Gに下降させて、直播装置5を作動状態として作業行程L02に入る。
作業行程L02において、右のマーカー18を格納姿勢に操作し、左のマーカー18を作用姿勢に操作して、作業行程L01において田面Gに形成された指標に沿って機体を走行させることにより、直播作業を行いながら、左のマーカー18により次の作業行程L03の指標を田面Gに形成する。
As shown in FIG. 20, when the aircraft reaches the heel from the work process L01, the
In the work process L02, the
図20に示すように、複数回の作業行程L01〜L06及び旋回LL1(右方向),LL2(左方向),LL3(右方向),LL4(左方向),LL5(右方向)を行うと、畦Bに沿って直播作業が行われていない部分が形成される。この状態において、作業行程L06から機体が畦際に達すると、右及び左のマーカー18を格納姿勢に操作した状態で、畦Bに沿って直播作業を行う。
As shown in FIG. 20, when a plurality of work strokes L01 to L06 and turning LL1 (right direction), LL2 (left direction), LL3 (right direction), LL4 (left direction), LL5 (right direction) are performed, A portion where the direct sowing operation is not performed along the ridge B is formed. In this state, when the aircraft reaches the heel from the work process L06, direct sowing work is performed along the heel B while the right and left
この場合、操作具80,83を第1位置に操作し、操作ロッド92を第2状態に操作した状態(全ての前繰り出し部20(第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15)の作動状態、1,3,4,5,7番目の後繰り出し部48(第2,6,8,10,14供給ラインL2,L6,L8,L10,L14)の作動状態、特定の後繰り出し部48(第4及び第12供給ラインL4,L12)の停止状態、溝切り器87の作用姿勢)において、作業行程L01〜L06を行うと、作業行程L01〜L06の各々において、後輪2の通過位置に溝切り器87により、田面Gに2本の排水用の溝Mが形成される。
In this case, the
図3,7,20に示すように、作業行程L01〜L06の各々における2本の排水用の溝Mの間隔W2は、第4〜第12供給ラインL4〜L12に相当して、所定間隔W1(図3及び図4参照)の8倍となる。 As shown in FIGS. 3, 7, and 20, the interval W2 between the two drainage grooves M in each of the work strokes L01 to L06 corresponds to the fourth to twelfth supply lines L4 to L12, and is a predetermined interval W1. 8 times (see FIGS. 3 and 4).
図3,7,20に示すように、例えば作業行程L02を行う場合、前回の作業行程L01の第15供給ラインL15に対して、作業行程L02の第15供給ラインL15が所定間隔W1を置いて位置するように機体を走行させる。
これにより、隣接する作業行程L01〜L06における排水用の溝の間隔W3は、第12〜第15供給ラインL12〜L15の2回分(第1〜第4供給ラインL1〜L4の2回分)に相当して、所定間隔W1(図3及び図4参照)の7倍となる。
As shown in FIGS. 3, 7 and 20, for example, when the work process L02 is performed, the fifteenth supply line L15 of the work process L02 is spaced a predetermined interval W1 from the fifteenth supply line L15 of the previous work process L01. Run the aircraft so that it is positioned.
Accordingly, the interval W3 between the drainage grooves in the adjacent work steps L01 to L06 corresponds to two times of the twelfth to fifteenth supply lines L12 to L15 (two times of the first to fourth supply lines L1 to L4). Thus, it becomes seven times the predetermined interval W1 (see FIGS. 3 and 4).
以上のように、作業行程L01〜L06の各々における2本の排水用の溝Mの間隔W2と、隣接する作業行程L01〜L06における排水用の溝の間隔W3が、ほぼ同じ値(1つの所定間隔W1の差)となるので、図20に示すように、田面Gに排水用の溝Mが略等間隔で形成されることになる。
この場合、右の溝切り器87を作用姿勢に操作して、左の溝切り器87を退避姿勢に操作すると(左の溝切り器87を作用姿勢に操作して、右の溝切り器87を退避姿勢に操作すると)、作業行程L01〜L06の各々において片側にだけ排水用の溝Mが形成されるので、田面Gに排水用の溝Mが不等間隔で形成されることになる。
As described above, the interval W2 between the two drainage grooves M in each of the work steps L01 to L06 and the interval W3 between the drainage grooves in the adjacent operation steps L01 to L06 are substantially the same value (one predetermined value). Therefore, as shown in FIG. 20, drainage grooves M are formed on the surface G at substantially equal intervals.
In this case, when the
[発明の実施の第1別形態]
前述の[発明を実施するための形態]において、右の後輪2の後方位置の溝切り器87を廃止して、左の後輪2の後方位置のみに溝切り器87を備えてもよく、このように構成すると、特定の作業部は2番目の後繰り出し部48(第4供給ラインL4)となる。
左の後輪2の後方位置の溝切り器87を廃止して、右の後輪2の後方位置のみに溝切り器87を備えてもよく、このように構成すると、特定の作業部は6番目の後繰り出し部48(第12供給ラインL12)となる。
右及び左の後輪2の後方位置の溝切り器87を廃止して、直播装置5の中心CLのみに溝切り器87を備えてもよく、このように構成すると、特定の作業部は4番目の後繰り出し部48(第8供給ラインL8)となる。
[First Alternative Embodiment of the Invention]
In the above-mentioned [Mode for Carrying Out the Invention], the
The
The
[発明の実施の第2別形態]
前述の[発明を実施するための形態][発明の実施の第1別形態]において、溝切り器87を全く備えないように構成してもよい。このように構成すると、特定の作業部を停止状態とすると、特定の作業部に対応する田面Gにおいて、種籾が供給されず且つ排水用の溝Mが形成されない状態が得られる。
[Second Embodiment of the Invention]
In the above-mentioned [Mode for Carrying Out the Invention] [First Alternative Embodiment], the grooving
前述の[発明を実施するための形態][発明の実施の第1別形態]において、特定の作業部に対応する直播装置5の部分に、溝切り器87を取り付けたり取り外したりできるように構成してもよい。このように構成すると、特定の作業部の停止状態において、特定の作業部に対応する田面Gにおいて種籾が供給されず且つ排水用の溝Mが形成されない状態(溝切り器87を取り外した状態)、並びに、特定の作業部に対応する田面Gにおいて種籾が供給されず且つ排水用の溝Mが形成される状態が得られる(溝切り器87を取り付けた状態)。
In the above-mentioned [Mode for Carrying Out the Invention] [First Another Mode for Carrying Out the Invention], the grooving
[発明の実施の第3別形態]
前述の[発明を実施するための形態][発明の実施の第1別形態][発明の実施の第2別形態]において、操作ロッド92を廃止し、溝切り器87を作用及び退避姿勢に操作する電動モータ(図示せず)、特定の作業部を作動及び停止状態に操作する電動モータ(図示せず)(操作機構に相当)を備え、運転者が操作する操作スイッチ(図示せず)の操作信号に基づいて、電動モータにより溝切り器87が作用及び退避姿勢に操作され、電動モータにより特定の作業部が作動及び停止状態に操作されるように構成してもよい。
[Third Another Embodiment of the Invention]
In the above-mentioned [Mode for Carrying Out the Invention] [First Another Mode for Carrying Out the Invention] [Second Another Mode for Carrying Out the Invention], the operating
操作具80,83を廃止し、操作軸79,82を回転操作する2個の電動モータ(図示せず)と、単一の操作スイッチ(図示せず)とを備えて、操作スイッチを第1〜8位置に操作すると、電動モータにより操作軸79,82が第1〜8位置に操作されるように構成してもよい。
The
[発明の実施の第4別形態]
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第3別形態]において、鉄コーティング処理された種籾を田面Gに供給する場合、作溝器27,55を廃止して、前及び後繰り出し部20,48から繰り出された種籾が、溝の形成されていない田面Gに供給されるように構成してもよい。
カルパコーティング処理された種籾を田面Gに供給する場合、作溝器27,55により少し深い溝が田面Gに形成されるように構成して、溝に種籾が供給されるように構成し、溝を埋め戻す覆土部材(図示せず)を作溝器27,55の後方に備えるように構成してもよい。
[Fourth Embodiment of the Invention]
In the above-mentioned [Mode for carrying out the invention] [First embodiment of the invention] to [Third another embodiment of the invention], when the seed coated with iron coating is supplied to the rice field G, groove formation is performed. The
In the case where the seed rice subjected to the calpa coating process is supplied to the rice field G, the
[発明の実施の第5別形態]
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第4別形態]において、前及び後繰り出し部20,48を以下の(1)〜(9)に示すように配置してもよい。
[Fifth Embodiment of the Invention]
In the above-mentioned [Mode for Carrying Out the Invention] [First Alternative Embodiment of the Invention] to [Fourth Alternative Embodiment of the Invention], the front and rear pay-out
(1)図21の(1)に示すように、7個の前繰り出し部20(作溝器27)を、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14(偶数番目の供給ライン)の上方に配置し、8個の後繰り出し部48(作溝器55)を、第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15(奇数番目の供給ライン)の上方に配置する。
このように構成すると、後輪2が第4及び第12供給ラインL4,L12に位置するとすれば、後輪2の後方位置の特定の作業部は、2番目及び6番目の前繰り出し部20(第4及び第12供給ラインL4,L12)となる。
(1) As shown in (1) of FIG. 21, the seven forward feeding portions 20 (groove forming devices 27) are connected to the second, fourth, sixth, eighth, tenth, twelfth and fourteenth supply lines L2, L4, L6. , L8, L10, L12, L14 (even-numbered supply lines), and eight rear feed portions 48 (grooving devices 55) are arranged in the first, third, fifth, seventh, ninth, eleventh, thirteenth, , 15 supply lines L1, L3, L5, L7, L9, L11, L13, L15 (odd-numbered supply lines) are arranged above.
If comprised in this way, if the
(2)図21の(2)に示すように、7個の前繰り出し部20(作溝器27)を、第1,3,5,7,9,11,13供給ラインL1,L3,L5,L7,L9,L11,L13(奇数番目の供給ライン)の上方に配置し、前繰り出し部20と同数の7個の後繰り出し部48を、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14(偶数番目の供給ライン)の上方に配置する。この場合、前及び後繰り出し部20,48の配置は、左右非対称となる。
このように構成すると、後輪2が第4及び第12供給ラインL4,L12に位置するとすれば、後輪2の後方位置の特定の作業部は、2番目及び6番目の後繰り出し部48(第4及び第12供給ラインL4,L12)となる。
(2) As shown in (2) of FIG. 21, the seven forward feeding portions 20 (groove forming devices 27) are connected to the first, third, fifth, seventh, ninth, eleventh and thirteenth supply lines L1, L3, L5. , L7, L9, L11, L13 (odd-numbered supply lines), and the same number of seven
If comprised in this way, if the rear-
(3)前項(2)とは逆に、7個の前繰り出し部20(作溝器27)を、第2,4,6,8,10,12,14供給ラインL2,L4,L6,L8,L10,L12,L14(偶数番目の供給ライン)の上方に配置し、前繰り出し部20と同数の7個の後繰り出し部48を、第1,3,5,7,9,11,13供給ラインL1,L3,L5,L7,L9,L11,L13(奇数番目の供給ライン)の上方に配置する。この場合、前及び後繰り出し部20,48の配置は、左右非対称となる。
このように構成すると、後輪2が第4及び第12供給ラインL4,L12に位置するとすれば、後輪2の後方位置の特定の作業部は、2番目及び6番目の前繰り出し部20(第4及び第12供給ラインL4,L12)となる。
(3) Contrary to the previous item (2), the seven forward feeding portions 20 (groover 27) are connected to the second, fourth, sixth, eighth, tenth, twelfth and fourteenth supply lines L2, L4, L6, L8. , L10, L12, and L14 (even-numbered supply lines), and supply the first, third, fifth, seventh, ninth, eleventh, and thirteen
If comprised in this way, if the
(4)図21の(4)に示すように、8個の前繰り出し部20(作溝器27)を、第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15(奇数番目の供給ライン)の上方に配置し、5個の後繰り出し部48を、第4,6,8,10,12供給ラインL4,L6,L8,L10,L12(偶数番目の供給ライン)の上方に配置する。
このように構成すると、後輪2が第4及び第12供給ラインL4,L12に位置するとすれば、後輪2の後方位置の特定の作業部は、1番目及び5番目の後繰り出し部48(第4及び第12供給ラインL4,L12)となる。
(4) As shown in FIG. 21 (4), the eight front feeding portions 20 (groove forming devices 27) are connected to the first, third, fifth, seventh, ninth, eleventh, thirteenth and fifteenth supply lines L1, L3. , L5, L7, L9, L11, L13, and L15 (odd-numbered supply lines), and the five
If comprised in this way, if the
(5)前項(4)とは逆に、5個の前繰り出し部20(作溝器27)を、第4,6,8,10,12供給ラインL4,L6,L8,L10,L12(偶数番目の供給ライン)の上方に配置し、8個の後繰り出し部48を、第1,3,5,7,9,11,13,15供給ラインL1,L3,L5,L7,L9,L11,L13,L15(奇数番目の供給ライン)の上方に配置する。
このように構成すると、後輪2が第4及び第12供給ラインL4,L12に位置するとすれば、後輪2の後方位置の特定の作業部は、1番目及び5番目の前繰り出し部20(第4及び第12供給ラインL4,L12)となる。
(5) Contrary to the previous item (4), the five forward feeding portions 20 (groove forming devices 27) are connected to the fourth, sixth, eighth, tenth and twelfth supply lines L4, L6, L8, L10, L12 (even numbers). The eight supply lines L1, L3, L5, L7, L9, L11, and the eight
If comprised in this way, if the
(6)前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第4別形態]及び前項(1)において、前及び後繰り出し部20,48の数を8個及び7個ではなく、7個と6個、5個と4個、9個と8個等のように各種の数の組み合わせを設定する。
(6) In the above-mentioned [Mode for Carrying Out the Invention] [First Another Mode for Carrying Out the Invention] to [Fourth Another Mode for Carrying Out the Invention] and in the preceding item (1), the front and
(7)前項(2)及び(3)において、前及び後繰り出し部20,48の数を7個ずつではなく、8個ずつ、9個ずつ、6個ずつ、5個ずつ、4個ずつ等のように各種の数を設定する。
(7) In the preceding paragraphs (2) and (3), the number of the front and
(8)前項(4)及び(5)において、前及び後繰り出し部20,48の数を8個及び5個ではなく、8個と3個、10個と5個、10個と7個等のように各種の数の組み合わせを設定する。
(8) In the preceding paragraphs (4) and (5), the number of the front and
(9)前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第4別形態]及び前項(1)〜(8)において、複数の供給ラインを田面Gに設定する場合、右端部の供給ラインを第1供給ラインL1としてもよい。この場合、隣接する供給ラインの間隔(所定間隔W1)を、150mmよりも少し狭く設定してもよく、少し広く設定してもよい。 (9) A plurality of supply lines in the above-mentioned [Mode for Carrying Out the Invention] [First Alternative Embodiment of the Invention] to [Fourth Alternative Embodiment of the Invention] and the preceding items (1) to (8) Is set to the surface G, the supply line at the right end may be the first supply line L1. In this case, the interval between the adjacent supply lines (predetermined interval W1) may be set slightly narrower than 150 mm or may be set slightly wider.
[発明の実施の第6別形態]
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第5別形態]において、前及び後繰り出し部20,48を前後に配置するのではなく、全ての繰り出し部を左右方向に一列に配置するように構成してもよい。
直播装置5に代えて、田面Gに苗を植え付ける苗植付装置(水田作業装置に相当)(図示せず)を機体の後部に備えた乗用型田植機にも、本発明は適用できる。この場合、苗植付装置において、田面Gに苗を植え付ける植付アーム(図示せず)が作業部となるのであり、隣接する植付アームの間隔(所定間隔)(条間)を一般的な300〜250mmとすればよい。
[Sixth Embodiment of the Invention]
In the above-mentioned [Mode for Carrying Out the Invention] [First Another Mode for Carrying Out the Invention] to [Fifth Another Mode for Carrying Out the Invention], the front and
The present invention can also be applied to a riding type rice transplanter provided with a seedling planting device (corresponding to a paddy field working device) (not shown) for planting seedlings on the rice field G in place of the
本発明は、催芽状態で少し芽が出始めた状態の種籾を田面Gに供給する水田作業機ばかりではなく、鉄コーティング処理された種籾、カルパコーティング処理された種籾を田面Gに供給する乗用型直播機にも適用でき、田面に苗を植え付ける苗植付装置を備えた乗用型田植機にも適用できる。 The present invention is not only a paddy working machine that supplies seed surface G to seed surface G in a state where buds have begun to emerge a little in the sprouting state, but also a riding type that supplies seed surface treated with iron coating and seed material subjected to calpa coating to field surface G. It can also be applied to a direct sowing machine, and it can also be applied to a riding type rice transplanter equipped with a seedling planting device for planting seedlings on a rice field.
2 後輪
5 水田作業装置
20,48 作業部
75b クラッチ部材
87 溝切り器
92 操作機構
G 田面
M 排水用の溝
2
Claims (4)
田面に種籾を供給する繰り出し部である複数の作業部又は田面に苗を植え付ける植付アームである複数の作業部を、左右方向に所定間隔を置いて並べて配置して、前記水田作業装置を構成し、
複数の前記作業部のうちの特定の前記作業部を、作動及停止状態に操作自在な操作機構を備え、
特定の前記作業部に対応する田面に位置するように、排水用の溝を形成する溝切り器が備えられ、
複数の前記作業部を、右端部の前記作業部が機体の右の後輪の後方位置に対して右横外側に位置し、左端部の前記作業部が機体の左の後輪の後方位置に対して左横外側に位置するように、左右方向に所定間隔を置いて並べて配置して、前記水田作業装置を構成し、
特定の前記作業部が、右端部及び左端部の前記作業部を除いた残りの前記作業機のうちの一つであり、
前記溝切り器が、田面に接地して排水用の溝を形成する作用姿勢、及び田面から上方に離れた退避姿勢に姿勢変更自在であり、
前記操作機構により特定の前記作業部が停止状態に操作されると、前記溝切り器が前記作用姿勢に操作され、前記操作機構により特定の前記作業部が作動状態に操作されると、前記溝切り器が前記退避姿勢に操作される水田作業機。 A paddy field working device is installed at the rear of the aircraft,
The paddy field work apparatus is configured by arranging a plurality of work sections that are feeding sections for supplying seed pods to a rice field or a plurality of work sections that are planting arms for planting seedlings on a rice field at a predetermined interval in the left-right direction. And
An operation mechanism that can freely operate the specific working unit among the plurality of working units in an activated and stopped state,
A grooving device for forming a groove for drainage is provided so as to be located on the surface corresponding to the specific working unit,
A plurality of the working parts are arranged such that the working part at the right end is located right laterally outside the rear position of the right rear wheel of the aircraft, and the working part at the left end is located at the rear position of the left rear wheel of the aircraft. The paddy field work device is configured by arranging the left and right sides so as to be positioned at a predetermined interval in the left-right direction,
The specific working unit is one of the remaining working machines excluding the working unit at the right end and the left end,
The grooving device is capable of changing its posture to an action posture in which a groove for drainage is formed by grounding on a rice field, and a retreat posture away from the rice field,
When the specific working unit is operated to be stopped by the operating mechanism, the grooving device is operated to the working posture, and when the specific working unit is operated to be operated by the operating mechanism, the groove is A paddy field machine in which a cutter is operated to the retracted position.
特定の前記作業部が、後側の前記作業部のうちの一つである請求項1または2に記載の水田作業機。 The paddy field work device includes a plurality of front side working units arranged at predetermined intervals in the left-right direction and a plurality of front side working units arranged at predetermined intervals in the left-right direction on the rear side of the front working unit. And the working part on the rear side,
The paddy field work machine according to claim 1 or 2 , wherein the specific working unit is one of the rear working units.
特定の前記作業部の前記クラッチ部材を遮断状態に操作することにより、特定の前記作業部を停止状態に操作するように構成している請求項1〜3のうちのいずれか一項に記載の水田作業機。 Each of the working parts includes a clutch member capable of transmitting and closing power to the working parts.
By operating the clutch member of a particular of the working portion to the cut-off state, according to any one of claims 1 to 3 which is configured to manipulate a particular of the working portion in a stopped state Paddy field machine.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014000454A JP6436629B2 (en) | 2014-01-06 | 2014-01-06 | Paddy field machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014000454A JP6436629B2 (en) | 2014-01-06 | 2014-01-06 | Paddy field machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015128378A JP2015128378A (en) | 2015-07-16 |
| JP6436629B2 true JP6436629B2 (en) | 2018-12-12 |
Family
ID=53759701
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014000454A Active JP6436629B2 (en) | 2014-01-06 | 2014-01-06 | Paddy field machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6436629B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112970355B (en) * | 2019-12-17 | 2024-10-18 | 株式会社久保田 | Paddy field working machine |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6119409A (en) * | 1984-07-04 | 1986-01-28 | 井関農機株式会社 | Irrigation seeding apparatus |
| JP3655070B2 (en) * | 1997-10-28 | 2005-06-02 | ヤンマー農機株式会社 | Rice transplanter folding device |
| JP2000083419A (en) * | 1998-09-09 | 2000-03-28 | Kubota Corp | Dense planting type seedling planting apparatus |
| JP2002017115A (en) * | 2000-07-05 | 2002-01-22 | Yanmar Agricult Equip Co Ltd | Rice transplanter |
| JP2005160405A (en) * | 2003-12-03 | 2005-06-23 | Kubota Corp | Riding type implement with fertilizing device |
| JP4569610B2 (en) * | 2007-08-30 | 2010-10-27 | 井関農機株式会社 | Seedling transplanter |
| JP5513141B2 (en) * | 2010-01-15 | 2014-06-04 | 株式会社クボタ | Powder and particle feeder |
| JP5691212B2 (en) * | 2010-03-25 | 2015-04-01 | 井関農機株式会社 | Direct seeding machine |
| JP5822714B2 (en) * | 2011-12-26 | 2015-11-24 | 株式会社クボタ | Working machine |
-
2014
- 2014-01-06 JP JP2014000454A patent/JP6436629B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015128378A (en) | 2015-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4948043B2 (en) | Vertical seeding machine | |
| KR101255151B1 (en) | Multi function direct seeding apparatus for adjusting horizontal and vertical position by synchronous | |
| JP5839983B2 (en) | Working machine | |
| JP2013017485A (en) | Multipurpose machine | |
| JP6132777B2 (en) | Direct seeding machine | |
| JP6436629B2 (en) | Paddy field machine | |
| CN102783290A (en) | Wheel type rice wide-narrow-line direct seeding fertilization combined machine | |
| JP6157053B2 (en) | Paddy field machine | |
| CN104429255B (en) | The sugarcane planting machine cutting implement with gear sugarcane plate | |
| JP6120783B2 (en) | Paddy field machine | |
| JP2015039324A (en) | Paddy field working machine | |
| JP2015039325A (en) | Paddy field working machine | |
| JP7044693B2 (en) | Paddy field work machine | |
| JP5984632B2 (en) | Paddy field machine | |
| JP7097835B2 (en) | Paddy field work machine | |
| JP3006027B2 (en) | Fertilizer application equipment | |
| JP2010099044A (en) | Seedling transplanter | |
| JP5832270B2 (en) | Paddy field machine | |
| JP7178897B2 (en) | Paddy work machine | |
| CN204762078U (en) | Take advantage of with type transplanter and take advantage of and use type seed -sowing machine | |
| JP7304995B2 (en) | Paddy work machine | |
| JP2015195742A (en) | Seedling transplanter | |
| JP7169889B2 (en) | Paddy work machine | |
| JP5822711B2 (en) | Work machine frame structure | |
| JP2011142889A (en) | Rice transplanter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170307 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170501 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171107 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180914 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181016 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6436629 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |