JP6364448B2 - 映像復号化方法、映像符号化方法 - Google Patents
映像復号化方法、映像符号化方法 Download PDFInfo
- Publication number
- JP6364448B2 JP6364448B2 JP2016134526A JP2016134526A JP6364448B2 JP 6364448 B2 JP6364448 B2 JP 6364448B2 JP 2016134526 A JP2016134526 A JP 2016134526A JP 2016134526 A JP2016134526 A JP 2016134526A JP 6364448 B2 JP6364448 B2 JP 6364448B2
- Authority
- JP
- Japan
- Prior art keywords
- block
- availability
- motion information
- motion
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/109—Selection of coding mode or of prediction mode among a plurality of temporal predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/42—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation
- H04N19/436—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by implementation details or hardware specially adapted for video compression or decompression, e.g. dedicated software implementation using parallelised computational arrangements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Description
復元映像は、参照映像バッファ270に格納されて画面間予測に使われることができる。
インター予測のために適用される予測モードには、AMVP(Advanced Motion Vector Predictor)、マージ(merge)などがある。
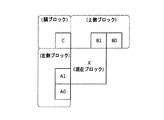
本発明は、このような隣接ブロックに対して動き候補として使用可能かどうかに対する動き情報可用性を決定する順序を制約することによって、同一符号化ユニット(CU)に属する予測ユニット(PU)の動き候補リスト(動き候補リスト)を並列的に構成することを可能にする。
現在PUブロックがマージモードに符号化された場合、Merge_flagは‘1’に設定され、その反対も設定することができる。

Claims (2)
- 映像の復号化方法において、
現在ブロックに隣接する空間的隣接ブロックの可用性を決定するステップであって、前記空間的隣接ブロックの前記可用性は、前記空間的隣接ブロックがインター予測に利用可能かどうかを示すブロック可用性と、前記空間的隣接ブロックの動き情報が前記インター予測に利用可能かどうかを示す動き情報可用性とを有する、ステップ;
前記空間的隣接ブロックの前記可用性に基づいて前記現在ブロックに対するマージ候補リストを生成するステップ;
前記マージ候補リストに基づいて、前記現在ブロックの予測サンプルを取得するステップ;
前記現在ブロックの残余サンプル(residual samples)を取得するステップ;および
前記残余サンプルおよび前記予測サンプルを用いて前記現在ブロックを再構成するステップ;を含み、
前記空間的隣接ブロックの前記動き情報可用性は、前記空間的隣接ブロックの前記動き情報を、ブロック可用性がトルー(true)である他の空間的隣接ブロックの動き情報と比較することによって決定され、
前記空間的隣接ブロックの前記ブロック可用性は、前記現在ブロックの位置情報および並列マージレベル情報を用いたシフト処理(shifting operation)によって導出された値が、前記空間的隣接ブロックの位置情報および前記並列マージレベル情報を用いたシフト処理によって導出された値と等しいかどうかに基づいて決定され、前記並列マージレベル情報は、並列マージ処理が適用可能なブロックの大きさを示し、
前記マージ候補リストは、ゼロ動きベクトルを有するマージ候補を含むことを特徴とする映像復号化方法。 - 映像の符号化方法において、
現在ブロックに隣接する空間的隣接ブロックの可用性を決定するステップであって、前記空間的隣接ブロックの前記可用性は、前記空間的隣接ブロックがインター予測に利用可能かどうかを示すブロック可用性と、前記空間的隣接ブロックの動き情報が前記インター予測に利用可能かどうかを示す動き情報可用性とを有する、ステップ;
前記空間的隣接ブロックの前記可用性に基づいて前記現在ブロックに対するマージ候補リストを生成するステップ;
前記マージ候補リストに基づいて、前記現在ブロックの予測サンプルを取得するステップ;
前記現在ブロックの残余サンプル(residual samples)を取得するステップ;および
前記残余サンプルおよび前記予測サンプルを用いて前記現在ブロックを再構成するステップ;を含み、
前記空間的隣接ブロックの前記動き情報可用性は、前記空間的隣接ブロックの前記動き情報を、ブロック可用性がトルー(true)である他の空間的隣接ブロックの動き情報と比較することによって決定され、
前記空間的隣接ブロックの前記ブロック可用性は、前記現在ブロックの位置情報および並列マージレベル情報を用いたシフト処理(shifting operation)によって導出された値が、前記空間的隣接ブロックの位置情報および前記並列マージレベル情報を用いたシフト処理によって導出された値と等しいかどうかに基づいて決定され、前記並列マージレベル情報は、並列マージ処理が適用可能なブロックの大きさを示し、
前記マージ候補リストは、ゼロ動きベクトルを有するマージ候補を含むことを特徴とする映像符号化方法。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20120113851 | 2012-10-12 | ||
| KR10-2012-0113851 | 2012-10-12 | ||
| KR10-2013-0121330 | 2013-10-11 | ||
| KR20130121330A KR101424220B1 (ko) | 2012-10-12 | 2013-10-11 | 영상의 부호화/복호화 방법 및 이를 이용하는 장치 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015512591A Division JP5969695B2 (ja) | 2012-10-12 | 2013-10-11 | 映像復号化方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016197896A JP2016197896A (ja) | 2016-11-24 |
| JP6364448B2 true JP6364448B2 (ja) | 2018-07-25 |
Family
ID=50655063
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015512591A Active JP5969695B2 (ja) | 2012-10-12 | 2013-10-11 | 映像復号化方法 |
| JP2016134542A Active JP6364450B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
| JP2016134526A Active JP6364448B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
| JP2016134512A Active JP6364447B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
| JP2016134536A Active JP6364449B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
| JP2018075663A Active JP6549279B2 (ja) | 2012-10-12 | 2018-04-10 | 映像の符号化/復号化方法及びそれを利用する装置 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015512591A Active JP5969695B2 (ja) | 2012-10-12 | 2013-10-11 | 映像復号化方法 |
| JP2016134542A Active JP6364450B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016134512A Active JP6364447B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
| JP2016134536A Active JP6364449B2 (ja) | 2012-10-12 | 2016-07-06 | 映像復号化方法、映像符号化方法 |
| JP2018075663A Active JP6549279B2 (ja) | 2012-10-12 | 2018-04-10 | 映像の符号化/復号化方法及びそれを利用する装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (10) | US10506253B2 (ja) |
| EP (3) | EP2908530A4 (ja) |
| JP (6) | JP5969695B2 (ja) |
| KR (21) | KR101424220B1 (ja) |
| CN (6) | CN110545419B (ja) |
| TW (5) | TWI651963B (ja) |
| WO (1) | WO2014058280A1 (ja) |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110545419B (zh) | 2012-10-12 | 2022-11-22 | 韩国电子通信研究院 | 图像编码/解码方法和使用其的装置 |
| KR20140121315A (ko) * | 2013-04-04 | 2014-10-15 | 한국전자통신연구원 | 참조 픽처 리스트를 이용한 다 계층 기반의 영상 부호화/복호화 방법 및 그 장치 |
| US9438908B1 (en) * | 2014-02-25 | 2016-09-06 | Pixelworks, Inc. | Motion vector interpolation based on true motion and layer information |
| KR102378459B1 (ko) | 2014-06-30 | 2022-03-24 | 한국전자통신연구원 | 움직임 병합 모드에서 시점 합성 예측 후보의 중복성 제거 장치 및 방법 |
| WO2016003074A1 (ko) * | 2014-06-30 | 2016-01-07 | 한국전자통신연구원 | 움직임 병합 모드에서 시점 합성 예측 후보의 중복성 제거 장치 및 방법 |
| US10321145B2 (en) | 2014-10-07 | 2019-06-11 | Samsung Electronics Co., Ltd. | Method and device for encoding or decoding image by means of view merging prediction |
| WO2017043734A1 (ko) * | 2015-09-07 | 2017-03-16 | 엘지전자(주) | 인터 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| JP6078138B1 (ja) * | 2015-10-30 | 2017-02-08 | Nttエレクトロニクス株式会社 | 動画像符号化装置及び動画像符号化方法 |
| WO2017091007A1 (ko) * | 2015-11-24 | 2017-06-01 | 삼성전자 주식회사 | 영상 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| TWI601410B (zh) * | 2016-01-11 | 2017-10-01 | 晨星半導體股份有限公司 | 視訊串流解碼方法及視訊串流解碼系統 |
| US10412390B2 (en) | 2016-07-12 | 2019-09-10 | Mediatek Inc. | Video processing system using low-cost video encoding/decoding architecture |
| CN116614641A (zh) | 2016-07-12 | 2023-08-18 | 韩国电子通信研究院 | 图像编码/解码方法和用于所述方法的记录介质 |
| KR102321394B1 (ko) * | 2016-08-01 | 2021-11-03 | 한국전자통신연구원 | 영상 부호화/복호화 방법 |
| WO2018066959A1 (ko) * | 2016-10-04 | 2018-04-12 | 주식회사 케이티 | 비디오 신호 처리 방법 및 장치 |
| WO2018070632A1 (ko) * | 2016-10-11 | 2018-04-19 | 엘지전자 주식회사 | 영상 코딩 시스템에서 영상 디코딩 방법 및 장치 |
| CN116916042A (zh) | 2017-10-20 | 2023-10-20 | 株式会社Kt | 视频信号处理方法以及存储介质 |
| WO2019083334A1 (ko) | 2017-10-26 | 2019-05-02 | 한국전자통신연구원 | 비대칭 서브 블록 기반 영상 부호화/복호화 방법 및 장치 |
| WO2019103564A1 (ko) * | 2017-11-27 | 2019-05-31 | 엘지전자 주식회사 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| CN117176958A (zh) | 2017-11-28 | 2023-12-05 | Lx 半导体科技有限公司 | 图像编码/解码方法、图像数据的传输方法和存储介质 |
| KR102387363B1 (ko) * | 2017-11-30 | 2022-04-18 | 엘지전자 주식회사 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| KR20190093172A (ko) * | 2018-01-31 | 2019-08-08 | 가온미디어 주식회사 | 움직임 정보를 처리하는 영상 처리 방법, 그를 이용한 영상 복호화, 부호화 방법 및 그 장치 |
| CN111837388B (zh) | 2018-03-09 | 2023-04-14 | 韩国电子通信研究院 | 使用样点滤波的图像编码/解码方法和设备 |
| US10397603B1 (en) * | 2018-05-08 | 2019-08-27 | Tencent America LLC | Method and apparatus for video coding |
| GB2588531B (en) | 2018-06-29 | 2023-02-01 | Beijing Bytedance Network Tech Co Ltd | Concept of using one or multiple look up tables to store motion information of previously coded in order and use them to code following blocks |
| CN110662054B (zh) | 2018-06-29 | 2023-01-06 | 北京字节跳动网络技术有限公司 | 用于视频处理的方法、装置、计算机可读存储介质 |
| BR112020024162A2 (pt) | 2018-06-29 | 2021-03-02 | Beijing Bytedance Network Technology Co., Ltd. | método de processamento de vídeo e aparelho para processar dados de vídeo, meios de armazenamento e de gravação legíveis por computador não transitórios, método para armazenar uma representação de fluxo de bits de um vídeo |
| BR112020024202A2 (pt) | 2018-06-29 | 2021-02-17 | Beijing Bytedance Network Technology Co., Ltd. | método de processamento de dados de vídeo, aparelho de processamento de vídeo e meios de armazenamento e gravação legíveis por computador não transitório |
| WO2020003269A1 (en) | 2018-06-29 | 2020-01-02 | Beijing Bytedance Network Technology Co., Ltd. | Selection of coded motion information for lut updating |
| WO2020003282A1 (en) | 2018-06-29 | 2020-01-02 | Beijing Bytedance Network Technology Co., Ltd. | Managing motion vector predictors for video coding |
| CN110662052B (zh) | 2018-06-29 | 2022-07-08 | 北京字节跳动网络技术有限公司 | 更新查找表(lut)的条件 |
| KR20240008952A (ko) | 2018-07-02 | 2024-01-19 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 인트라 예측 모드들을 갖는 lut들 및 비인접 블록들로부터의 인트라 모드 예측 |
| KR102286460B1 (ko) | 2018-07-18 | 2021-08-04 | 베이징 다지아 인터넷 인포메이션 테크놀로지 컴퍼니 리미티드 | 히스토리-기반 모션 벡터 예측을 사용한 비디오 코딩 방법 및 장치 |
| CN112219400B (zh) * | 2018-11-06 | 2024-03-26 | 北京字节跳动网络技术有限公司 | 依赖位置的对运动信息的存储 |
| JP7423624B2 (ja) * | 2018-11-08 | 2024-01-29 | オッポ広東移動通信有限公司 | ビデオ信号符号化/復号方法及びその機器 |
| US11736713B2 (en) * | 2018-11-14 | 2023-08-22 | Tencent America LLC | Constraint on affine model motion vector |
| KR20200078391A (ko) * | 2018-12-21 | 2020-07-01 | 주식회사 엑스리스 | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 |
| JP7275286B2 (ja) | 2019-01-10 | 2023-05-17 | 北京字節跳動網絡技術有限公司 | Lut更新の起動 |
| WO2020143824A1 (en) * | 2019-01-13 | 2020-07-16 | Beijing Bytedance Network Technology Co., Ltd. | Interaction between lut and shared merge list |
| WO2020147772A1 (en) | 2019-01-16 | 2020-07-23 | Beijing Bytedance Network Technology Co., Ltd. | Motion candidates derivation |
| WO2020159199A1 (ko) * | 2019-01-28 | 2020-08-06 | 주식회사 엑스리스 | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 |
| CN113454993A (zh) * | 2019-02-21 | 2021-09-28 | 韩国电子通信研究院 | 用于对视频进行编码/解码的方法和装置以及存储比特流的记录介质 |
| WO2020175915A1 (ko) | 2019-02-26 | 2020-09-03 | 주식회사 엑스리스 | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 |
| CN113615193A (zh) | 2019-03-22 | 2021-11-05 | 北京字节跳动网络技术有限公司 | Merge列表构建和其他工具之间的交互 |
| JP7319386B2 (ja) | 2019-04-19 | 2023-08-01 | 北京字節跳動網絡技術有限公司 | 異なる動きベクトル微調整における勾配計算 |
| WO2020244545A1 (en) * | 2019-06-05 | 2020-12-10 | Beijing Bytedance Network Technology Co., Ltd. | Interaction between motion vector refinements and other coding tools |
| WO2021060830A1 (ko) * | 2019-09-23 | 2021-04-01 | 주식회사 케이티 | 비디오 신호 처리 방법 및 장치 |
| KR20230043747A (ko) * | 2021-09-24 | 2023-03-31 | 주식회사 케이티 | 비디오 신호 부호화/복호화 방법, 그리고 비트스트림을 저장한 기록 매체 |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200618610A (en) * | 2004-07-20 | 2006-06-01 | Qualcomm Inc | Method and apparatus for motion vector processing |
| US8879635B2 (en) | 2005-09-27 | 2014-11-04 | Qualcomm Incorporated | Methods and device for data alignment with time domain boundary |
| KR101365567B1 (ko) * | 2007-01-04 | 2014-02-20 | 삼성전자주식회사 | 영상의 예측 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| JP2010509799A (ja) * | 2006-11-03 | 2010-03-25 | サムスン エレクトロニクス カンパニー リミテッド | 映像の予測符号化方法及び装置、その復号化方法及び装置 |
| WO2008084423A1 (en) * | 2007-01-08 | 2008-07-17 | Nokia Corporation | Improved inter-layer prediction for extended spatial scalability in video coding |
| KR101364195B1 (ko) * | 2008-06-26 | 2014-02-21 | 에스케이텔레콤 주식회사 | 움직임벡터 부호화/복호화 방법 및 그 장치 |
| CN101677406B (zh) * | 2008-09-19 | 2011-04-20 | 华为技术有限公司 | 一种视频编解码的方法及装置 |
| CN101854540B (zh) * | 2009-04-01 | 2014-07-02 | 辉达公司 | 用于应用h.264视频编码标准的帧内预测方法及装置 |
| KR20110071047A (ko) | 2009-12-20 | 2011-06-28 | 엘지전자 주식회사 | 비디오 신호 디코딩 방법 및 장치 |
| KR20110135471A (ko) * | 2010-06-11 | 2011-12-19 | (주)휴맥스 | 블록 병합을 이용한 영상 부호화/복호화 장치 및 방법 |
| KR101432771B1 (ko) | 2010-03-05 | 2014-08-26 | 에스케이텔레콤 주식회사 | 영상 부호화 장치, 그 영상 부호화 방법, 영상 복호화 장치 및 그 영상 복호화 방법 |
| WO2011127963A1 (en) * | 2010-04-13 | 2011-10-20 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Sample region merging |
| KR20110135763A (ko) * | 2010-06-11 | 2011-12-19 | 에스케이 텔레콤주식회사 | 문맥 모델링 방법 및 장치와 이를 이용한 영상 부호화/복호화 방법 및 장치 |
| DK2897365T3 (da) * | 2010-07-09 | 2017-02-13 | Samsung Electronics Co Ltd | Apparat til at afkode video ved at anvende bloksammenlægning |
| CN101924938B (zh) * | 2010-08-11 | 2012-09-05 | 上海交通大学 | 视频解码宏块预测与边界滤波中相邻块信息的处理方法 |
| US9165379B2 (en) * | 2010-09-02 | 2015-10-20 | Lg Electronics Inc. | Method for encoding and decoding video, and apparatus using same |
| HUE053483T2 (hu) * | 2010-10-08 | 2021-06-28 | Ge Video Compression Llc | Blokk particionálást és összevonást támogató kép kódolás |
| CN106937123B (zh) | 2010-10-28 | 2020-03-27 | 韩国电子通信研究院 | 视频解码设备 |
| EP3962088B1 (en) * | 2010-11-04 | 2023-06-21 | GE Video Compression, LLC | Picture coding supporting block merging and skip mode |
| US8824558B2 (en) * | 2010-11-23 | 2014-09-02 | Mediatek Inc. | Method and apparatus of spatial motion vector prediction |
| WO2012070827A2 (ko) * | 2010-11-23 | 2012-05-31 | 엘지전자 주식회사 | 영상 부호화 및 복호화 방법과 이를 이용한 장치 |
| US9137544B2 (en) * | 2010-11-29 | 2015-09-15 | Mediatek Inc. | Method and apparatus for derivation of mv/mvp candidate for inter/skip/merge modes |
| CN102547270B (zh) * | 2010-12-31 | 2014-03-19 | 联芯科技有限公司 | 当前块的相邻块可用性获取方法及系统 |
| US8755437B2 (en) * | 2011-03-17 | 2014-06-17 | Mediatek Inc. | Method and apparatus for derivation of spatial motion vector candidate and motion vector prediction candidate |
| US9066110B2 (en) * | 2011-03-08 | 2015-06-23 | Texas Instruments Incorporated | Parsing friendly and error resilient merge flag coding in video coding |
| JP5979405B2 (ja) * | 2011-03-11 | 2016-08-24 | ソニー株式会社 | 画像処理装置および方法 |
| US9143795B2 (en) * | 2011-04-11 | 2015-09-22 | Texas Instruments Incorporated | Parallel motion estimation in video coding |
| PL2755389T3 (pl) * | 2011-09-09 | 2019-06-28 | Lg Electronics Inc. | Sposób predykcji inter i urządzenie do niego |
| US20130070855A1 (en) * | 2011-09-17 | 2013-03-21 | Qualcomm Incorporated | Hybrid motion vector coding modes for video coding |
| KR101197176B1 (ko) | 2011-09-23 | 2012-11-05 | 주식회사 케이티 | 머지 후보 블록 유도 방법 및 이러한 방법을 사용하는 장치 |
| CN107959852A (zh) * | 2011-11-08 | 2018-04-24 | 株式会社Kt | 对视频信号进行解码的方法 |
| US9516334B2 (en) * | 2011-11-08 | 2016-12-06 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| KR101205017B1 (ko) * | 2011-11-23 | 2012-11-26 | (주)휴맥스 | 비대칭 파티션에 대한 공통 병합 후보 블록 집합을 이용한 영상 부호화 방법 및 복호화 방법 |
| US9451277B2 (en) * | 2012-02-08 | 2016-09-20 | Qualcomm Incorporated | Restriction of prediction units in B slices to uni-directional inter prediction |
| CN110545419B (zh) | 2012-10-12 | 2022-11-22 | 韩国电子通信研究院 | 图像编码/解码方法和使用其的装置 |
| KR101854003B1 (ko) * | 2013-07-02 | 2018-06-14 | 경희대학교 산학협력단 | 복수의 레이어를 포함하는 영상의 부호화 및 복호화 방법 |
| EP3062518A4 (en) * | 2013-10-24 | 2017-05-31 | Electronics and Telecommunications Research Institute | Video encoding/decoding method and apparatus |
| JP2016134512A (ja) * | 2015-01-20 | 2016-07-25 | トヨタ自動車株式会社 | コイルユニット |
| JP6439457B2 (ja) * | 2015-01-20 | 2018-12-19 | 新電元メカトロニクス株式会社 | ソレノイド |
| JP2016134526A (ja) * | 2015-01-20 | 2016-07-25 | リンテック株式会社 | 移載装置および移載方法 |
| JP6469455B2 (ja) * | 2015-01-21 | 2019-02-13 | 住友重機械工業株式会社 | レーザアニール装置 |
-
2013
- 2013-10-11 CN CN201910822895.XA patent/CN110545419B/zh active Active
- 2013-10-11 CN CN201910823814.8A patent/CN110545423B/zh active Active
- 2013-10-11 TW TW106141208A patent/TWI651963B/zh active
- 2013-10-11 US US14/390,135 patent/US10506253B2/en active Active
- 2013-10-11 JP JP2015512591A patent/JP5969695B2/ja active Active
- 2013-10-11 CN CN201910823228.3A patent/CN110545421B/zh active Active
- 2013-10-11 TW TW106141209A patent/TWI651962B/zh active
- 2013-10-11 CN CN201910823531.3A patent/CN110545422B/zh active Active
- 2013-10-11 EP EP13845954.0A patent/EP2908530A4/en not_active Ceased
- 2013-10-11 TW TW102136911A patent/TWI612799B/zh active
- 2013-10-11 EP EP22191612.5A patent/EP4135326A1/en active Pending
- 2013-10-11 KR KR20130121330A patent/KR101424220B1/ko active IP Right Grant
- 2013-10-11 WO PCT/KR2013/009122 patent/WO2014058280A1/ko active Application Filing
- 2013-10-11 TW TW106141207A patent/TWI653877B/zh active
- 2013-10-11 EP EP18210042.0A patent/EP3481065A1/en not_active Ceased
- 2013-10-11 TW TW106141210A patent/TWI662831B/zh active
- 2013-10-11 CN CN201380030775.7A patent/CN104396248B/zh active Active
- 2013-10-11 CN CN201910823211.8A patent/CN110545420B/zh active Active
- 2013-11-22 KR KR1020130142747A patent/KR101527443B1/ko active IP Right Grant
- 2013-11-22 KR KR1020130142748A patent/KR101779831B1/ko active IP Right Grant
- 2013-11-22 KR KR20130142746A patent/KR101424219B1/ko active IP Right Grant
-
2016
- 2016-05-09 KR KR1020160056507A patent/KR101861703B1/ko active IP Right Grant
- 2016-05-09 KR KR1020160056502A patent/KR101750997B1/ko active IP Right Grant
- 2016-05-09 KR KR1020160056497A patent/KR101750996B1/ko active IP Right Grant
- 2016-05-17 KR KR1020160060207A patent/KR101750998B1/ko active IP Right Grant
- 2016-07-06 JP JP2016134542A patent/JP6364450B2/ja active Active
- 2016-07-06 JP JP2016134526A patent/JP6364448B2/ja active Active
- 2016-07-06 JP JP2016134512A patent/JP6364447B2/ja active Active
- 2016-07-06 JP JP2016134536A patent/JP6364449B2/ja active Active
-
2017
- 2017-08-30 KR KR1020170109963A patent/KR101882913B1/ko active IP Right Grant
- 2017-08-30 KR KR1020170109962A patent/KR101882912B1/ko active IP Right Grant
- 2017-08-30 KR KR1020170109961A patent/KR101882911B1/ko active IP Right Grant
-
2018
- 2018-04-10 JP JP2018075663A patent/JP6549279B2/ja active Active
- 2018-07-23 KR KR1020180085469A patent/KR101982037B1/ko active IP Right Grant
-
2019
- 2019-05-20 KR KR1020190058630A patent/KR102044256B1/ko active IP Right Grant
- 2019-10-24 US US16/662,609 patent/US11202096B2/en active Active
- 2019-10-24 US US16/662,266 patent/US11202094B2/en active Active
- 2019-10-24 US US16/662,825 patent/US11234018B2/en active Active
- 2019-10-24 US US16/662,377 patent/US11202095B2/en active Active
- 2019-10-24 US US16/662,501 patent/US11228785B2/en active Active
- 2019-11-07 KR KR1020190141506A patent/KR102112151B1/ko active IP Right Grant
- 2019-11-07 KR KR1020190141507A patent/KR102112669B1/ko active IP Right Grant
- 2019-11-07 KR KR1020190141505A patent/KR102112150B1/ko active IP Right Grant
-
2020
- 2020-05-13 KR KR1020200056999A patent/KR102153694B1/ko active IP Right Grant
- 2020-09-02 KR KR1020200111834A patent/KR102245490B1/ko active IP Right Grant
-
2021
- 2021-04-22 KR KR1020210052165A patent/KR102332284B1/ko active IP Right Grant
- 2021-11-05 US US17/519,667 patent/US11743491B2/en active Active
- 2021-11-24 KR KR1020210163196A patent/KR102423641B1/ko active IP Right Grant
-
2022
- 2022-07-18 KR KR1020220088232A patent/KR102504802B1/ko active IP Right Grant
-
2023
- 2023-07-05 US US18/346,917 patent/US20230370634A1/en active Pending
- 2023-07-05 US US18/346,914 patent/US20230370633A1/en active Pending
- 2023-07-05 US US18/346,908 patent/US20230370632A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6364448B2 (ja) | 映像復号化方法、映像符号化方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A132 Effective date: 20170725 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180111 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180410 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20180607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180626 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180702 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6364448 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |