JP6334830B2 - ブロックの区分を用いた高速ビデオ符号化方法 - Google Patents
ブロックの区分を用いた高速ビデオ符号化方法 Download PDFInfo
- Publication number
- JP6334830B2 JP6334830B2 JP2017546226A JP2017546226A JP6334830B2 JP 6334830 B2 JP6334830 B2 JP 6334830B2 JP 2017546226 A JP2017546226 A JP 2017546226A JP 2017546226 A JP2017546226 A JP 2017546226A JP 6334830 B2 JP6334830 B2 JP 6334830B2
- Authority
- JP
- Japan
- Prior art keywords
- block
- sub
- video
- partitions
- mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 218
- 230000011218 segmentation Effects 0.000 title description 7
- 238000012790 confirmation Methods 0.000 claims description 151
- 238000005192 partition Methods 0.000 claims description 141
- 230000033001 locomotion Effects 0.000 claims description 108
- 238000000638 solvent extraction Methods 0.000 claims description 71
- 238000003860 storage Methods 0.000 claims description 27
- 230000004044 response Effects 0.000 claims description 19
- 238000012795 verification Methods 0.000 claims description 18
- 238000010200 validation analysis Methods 0.000 claims description 10
- 230000008569 process Effects 0.000 description 106
- 241000023320 Luma <angiosperm> Species 0.000 description 35
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 description 35
- 238000010586 diagram Methods 0.000 description 34
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 30
- 238000009826 distribution Methods 0.000 description 30
- 238000013139 quantization Methods 0.000 description 25
- 239000013598 vector Substances 0.000 description 25
- 230000002123 temporal effect Effects 0.000 description 20
- 238000006243 chemical reaction Methods 0.000 description 19
- 230000003044 adaptive effect Effects 0.000 description 17
- 238000004891 communication Methods 0.000 description 17
- 230000005540 biological transmission Effects 0.000 description 9
- 230000000007 visual effect Effects 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 238000013500 data storage Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 5
- 238000005457 optimization Methods 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 230000009286 beneficial effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 238000003491 array Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000003066 decision tree Methods 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 238000012432 intermediate storage Methods 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 241000985610 Forpus Species 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000012163 sequencing technique Methods 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images


























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/109—Selection of coding mode or of prediction mode among a plurality of temporal predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/14—Coding unit complexity, e.g. amount of activity or edge presence estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/146—Data rate or code amount at the encoder output
- H04N19/147—Data rate or code amount at the encoder output according to rate distortion criteria
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/174—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a slice, e.g. a line of blocks or a group of blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/567—Motion estimation based on rate distortion criteria
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
c=σ/μ
12 ソースデバイス
14 宛先デバイス
16 チャネル
18 ビデオソース
20 ビデオエンコーダ
22 出力インターフェース
28 入力インターフェース
30 ビデオデコーダ
32 ディスプレイデバイス
40 モード選択ユニット
41 ビデオデータメモリ
42 動き推定ユニット
44 動き補償ユニット
46 イントラ予測ユニット
48 区分ユニット
50 加算器
52 変換処理ユニット
54 量子化ユニット
56 エントロピー符号化ユニット
58 逆量子化ユニット
60 逆変換ユニット
62 加算器
64 復号ピクチャバッファ
69 ビデオデータメモリ
70 エントロピー復号ユニット
72 動き補償ユニット
74 イントラ予測ユニット
76 逆量子化ユニット
78 逆変換ユニット
80 加算器
82 復号ピクチャバッファ
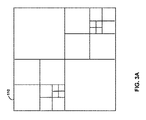
100 CU
102 リーフCU
110 CTU
111 CTU
112 4分木構造
114 区分
116 変換木
120 プロセス
140 モード確認プロセス
160 モード確認プロセス
180 プロセス
200 プロセス
220 プロセス
240 誤差予測分布
260 プロセス
280 誤差分布
300 プロセス
320 プロセス
340 グラフ
360 円
362 円
Claims (21)
- ビデオデータを符号化する方法であって、
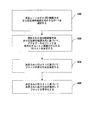
前記ビデオデータのブロックの複雑さが閾値を超える場合における完全レートひずみ(RD)確認方式または前記ブロックの前記複雑さが前記閾値を超えない場合における高速RD確認方式のうちの1つを選択するステップであって、前記ブロックの前記複雑さが、前記ブロックのサブ区分間でのひずみのばらつきに基づき、前記高速RD確認方式が、前記高速RD確認方式の早期終了を含む、ステップと、
前記選択された完全RD確認方式または高速RD確認方式に基づいて、前記ビデオデータの前記ブロックを符号化することと関連付けられるRDコストを決定するステップと、
前記決定されたRDコストに基づいて、前記ブロックの区分方式を決定するステップと、
前記決定されたRDコストに基づいて、前記決定された区分方式を使用して前記ブロックを符号化するステップとを備える、方法。 - 前記高速RD確認方式を選択したことに応答して、前記ブロックに対する最大の区分サイズと関連付けられるひずみ値を決定するステップと、
前記ブロックに対する前記最大の区分サイズと関連付けられる前記ひずみ値が閾値のひずみ値を超えると判定したことに応答して、前記ブロックをサブ区分へ区分するかどうかを判定するステップとさらに備える、請求項1に記載の方法。 - 前記ブロックをサブ区分へ区分するかどうかを判定するステップがさらに、
前記サブ区分の各々と関連付けられるひずみ値を第2のひずみ閾値と比較するステップと、
前記サブ区分の少なくとも1つが前記第2のひずみ閾値より大きなひずみ値を有すると判定したことに応答して、前記ブロックをサブ区分へ区分するステップとをさらに備える、請求項2に記載の方法。 - 前記第2のひずみ閾値が、前記サブ区分の各々と関連付けられる前記ひずみ値のスケーリングされた平均に基づく、請求項3に記載の方法。
- 前記第2のひずみ閾値が、前記サブ区分の各々と関連付けられる前記ひずみ値のばらつきに基づく、請求項3に記載の方法。
- 前記ブロックをサブ区分へ区分するかどうかを判定するステップがさらに、
前記サブ区分のうちの1つが、少なくとも1つの他の前記サブ区分と比較して異なる動き情報と関連付けられるかどうかを判定するステップと、
前記サブ区分のうちの前記1つが、前記少なくとも1つの他の前記サブ区分と比較して異なる動き情報と関連付けられると判定したことに応答して、前記サブ区分のうちの前記1つを追加のサブ区分へさらに区分するステップとを備える、請求項3に記載の方法。 - 前記完全RD確認方式を選択するステップが、ビデオデータの前記ブロックを含む現在のスライスがiスライスである場合、前記完全RD確認方式を選択するステップを備える、請求項1に記載の方法。
- 前記完全RD確認方式または前記高速RD確認方式を選択するステップが、ビデオエンコーダの高速符号化モードが有効にされているかどうかに基づく、請求項1に記載の方法。
- 前記完全RD確認方式を選択するステップが、前記ブロックがSKIPモードを使用してコーディングされるときに前記完全RD確認方式を選択するステップを備える、請求項1に記載の方法。
- ビデオデータを記憶するように構成されるメモリと、
少なくとも1つのプロセッサとを備え、前記少なくとも1つのプロセッサが、
前記ビデオデータのブロックの複雑さが閾値を超える場合における完全レートひずみ(RD)確認方式または前記ブロックの前記複雑さが前記閾値を超えない場合における高速RD確認方式のうちの1つを選択することであって、前記ブロックの前記複雑さが、前記ブロックのサブ区分間でのひずみのばらつきに基づき、前記高速RD確認方式が、前記高速RD確認方式の早期終了を含む、選択することをし、
前記選択された完全RD確認方式または高速RD確認方式に基づいて、前記ビデオデータの前記ブロックを符号化することと関連付けられるRDコストを決定し、
前記決定されたRDコストに基づいて、前記ブロックの区分方式を決定し、
前記決定されたRDコストに基づいて、前記決定された区分方式を使用して前記ブロックを符号化するように構成される、ビデオ符号化デバイス。 - 前記少なくとも1つのプロセッサが、
前記高速RD確認方式を選択したことに応答して、前記ブロックに対する最大の区分サイズと関連付けられるひずみ値を決定し、
前記ブロックに対する前記最大の区分サイズと関連付けられる前記ひずみ値が閾値のひずみ値を超えると判定したことに応答して、前記ブロックをサブ区分へ区分するかどうかを判定するようにさらに構成される、請求項10に記載のビデオ符号化デバイス。 - 前記ブロックをサブ区分へ区分するかどうかを判定するために、前記少なくとも1つのプロセッサがさらに、
前記サブ区分の各々と関連付けられるひずみ値を第2のひずみ閾値と比較し、
前記サブ区分の少なくとも1つが前記第2のひずみ閾値より大きなひずみ値を有すると判定したことに応答して、前記ブロックをサブ区分へ区分するように構成される、請求項11に記載のデバイス。 - 前記ブロックをサブ区分へ区分するかどうかを判定するために、前記少なくとも1つのプロセッサがさらに、
前記サブ区分のうちの1つが、少なくとも1つの他の前記サブ区分と比較して異なる動き情報と関連付けられるかどうかを判定し、
前記サブ区分のうちの前記1つが、前記少なくとも1つの他の前記サブ区分と比較して異なる動き情報と関連付けられると判定したことに応答して、前記サブ区分のうちの前記1つを追加のサブ区分へさらに区分するように構成される、請求項11に記載のデバイス。 - 前記完全RD確認方式を選択するために、前記少なくとも1つのプロセッサがさらに、ビデオデータの前記ブロックを含む現在のスライスがiスライスである場合、前記完全RD確認方式を選択するように構成される、請求項10に記載のデバイス。
- 前記完全RD確認方式を選択するために、前記少なくとも1つのプロセッサが、前記ブロックがSKIPモードを使用してコーディングされるときに前記完全RD確認方式を選択するように構成される、請求項10に記載のデバイス。
- 実行されると、ビデオ符号化デバイスの少なくとも1つのプロセッサに、
ビデオデータのブロックの複雑さが閾値を超える場合における完全レートひずみ(RD)確認方式または前記ブロックの前記複雑さが前記閾値を超えない場合における高速RD確認方式のうちの1つを選択することであって、前記ブロックの前記複雑さが、前記ブロックのサブ区分間でのひずみのばらつきに基づき、前記高速RD確認方式が、前記高速RD確認方式の早期終了を含む、選択することをし、
前記選択された完全RD確認方式または高速RD確認方式に基づいて、前記ビデオデータの前記ブロックを符号化することと関連付けられるRDコストを決定し、
前記決定されたRDコストに基づいて、前記ブロックの区分方式を決定し、
前記決定されたRDコストに基づいて、前記決定された区分方式を使用して前記ブロックを符号化するようにさせる命令を記憶した、コンピュータ可読記憶媒体。 - 実行されると、前記少なくとも1つのプロセッサに、
前記高速RD確認方式を選択したことに応答して、前記ブロックに対する最大の区分サイズと関連付けられるひずみ値を決定し、
前記ブロックに対する前記最大の区分サイズと関連付けられる前記ひずみ値が閾値のひずみ値を超えると判定したことに応答して、前記ブロックをサブ区分へ区分するかどうかを判定するようにさせる命令を記憶した、請求項16に記載のコンピュータ可読記憶媒体。 - 前記ブロックをサブ区分へ区分するかどうかを判定するようにさせる命令は、実行されると、前記少なくとも1つのプロセッサに、
前記サブ区分の各々と関連付けられるひずみ値を第2のひずみ閾値と比較し、
前記サブ区分の少なくとも1つが前記第2のひずみ閾値より大きなひずみ値を有すると判定したことに応答して、前記ブロックをサブ区分へ区分するようにさせる、請求項17に記載のコンピュータ可読記憶媒体。 - 前記ブロックをサブ区分へ区分するかどうかを判定するようにさせる命令は、実行されると、前記少なくとも1つのプロセッサに、
前記サブ区分のうちの1つが、少なくとも1つの他の前記サブ区分と比較して異なる動き情報と関連付けられるかどうかを判定し、
前記サブ区分のうちの前記1つが、前記少なくとも1つの他の前記サブ区分と比較して異なる動き情報と関連付けられると判定したことに応答して、前記サブ区分のうちの前記1つを追加のサブ区分へさらに区分するようにさせる、請求項17に記載のコンピュータ可読記憶媒体。 - 前記完全RD確認方式を選択するようにさせる命令は、実行されると、前記少なくとも1つのプロセッサに、ビデオデータの前記ブロックを含む現在のスライスがiスライスである場合、前記完全RD確認方式を選択するようにさせる、請求項16に記載のコンピュータ可読記憶媒体。
- 前記完全RD確認方式を選択するようにさせる命令は、実行されると、前記少なくとも1つのプロセッサに、前記ブロックがSKIPモードを使用してコーディングされるときに前記完全RD確認方式を選択するようにさせる、請求項16に記載のコンピュータ可読記憶媒体。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562129545P | 2015-03-06 | 2015-03-06 | |
| US62/129,545 | 2015-03-06 | ||
| US14/737,271 US9883187B2 (en) | 2015-03-06 | 2015-06-11 | Fast video encoding method with block partitioning |
| US14/737,271 | 2015-06-11 | ||
| PCT/US2016/020684 WO2016144695A1 (en) | 2015-03-06 | 2016-03-03 | Fast video encoding method with block partitioning |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018511231A JP2018511231A (ja) | 2018-04-19 |
| JP6334830B2 true JP6334830B2 (ja) | 2018-05-30 |
Family
ID=56851106
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017546091A Pending JP2018511225A (ja) | 2015-03-06 | 2016-03-03 | ビデオ符号化のための適応的なモード確認順序 |
| JP2017546226A Expired - Fee Related JP6334830B2 (ja) | 2015-03-06 | 2016-03-03 | ブロックの区分を用いた高速ビデオ符号化方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017546091A Pending JP2018511225A (ja) | 2015-03-06 | 2016-03-03 | ビデオ符号化のための適応的なモード確認順序 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10085027B2 (ja) |
| EP (2) | EP3266205A1 (ja) |
| JP (2) | JP2018511225A (ja) |
| KR (2) | KR20170126896A (ja) |
| CN (2) | CN107409217B (ja) |
| WO (2) | WO2016144695A1 (ja) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10085027B2 (en) | 2015-03-06 | 2018-09-25 | Qualcomm Incorporated | Adaptive mode checking order for video encoding |
| US10390020B2 (en) * | 2015-06-08 | 2019-08-20 | Industrial Technology Research Institute | Video encoding methods and systems using adaptive color transform |
| US20160360205A1 (en) * | 2015-06-08 | 2016-12-08 | Industrial Technology Research Institute | Video encoding methods and systems using adaptive color transform |
| US10560702B2 (en) * | 2016-01-22 | 2020-02-11 | Intel Corporation | Transform unit size determination for video coding |
| MX2018014493A (es) * | 2016-05-25 | 2019-08-12 | Arris Entpr Llc | Particionamiento binario, ternario, cuaternario para jvet. |
| US10609423B2 (en) * | 2016-09-07 | 2020-03-31 | Qualcomm Incorporated | Tree-type coding for video coding |
| US10313686B2 (en) * | 2016-09-20 | 2019-06-04 | Gopro, Inc. | Apparatus and methods for compressing video content using adaptive projection selection |
| EP3306928A1 (en) | 2016-10-07 | 2018-04-11 | Thomson Licensing | Method and apparatus for encoding a video |
| CN106454360B (zh) * | 2016-10-26 | 2019-05-07 | 北京大学深圳研究生院 | 视频编码中帧内编码的码率估计方法 |
| WO2018128239A1 (ko) * | 2017-01-03 | 2018-07-12 | 엘지전자 주식회사 | 영상 코딩 시스템에서 블록 분할 구조에 따른 영상 디코딩 방법 및 장치 |
| TWI635742B (zh) * | 2017-01-09 | 2018-09-11 | 晨星半導體股份有限公司 | 動態影像編碼裝置及動態影像編碼方法 |
| US11399187B2 (en) * | 2017-03-10 | 2022-07-26 | Intel Corporation | Screen content detection for adaptive encoding |
| ES2632402B1 (es) * | 2017-03-31 | 2018-09-06 | Universidad De Jaén | Fotobiorreactor autónomo |
| WO2019113903A1 (zh) * | 2017-12-14 | 2019-06-20 | 北京金山云网络技术有限公司 | 一种编码单元划分决策方法、装置、编码器及存储介质 |
| JP7348078B2 (ja) * | 2018-02-08 | 2023-09-20 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| WO2019189279A1 (en) * | 2018-03-30 | 2019-10-03 | Sharp Kabushiki Kaisha | Systems and methods for partitioning video blocks at a boundary of a picture for video coding |
| US10949087B2 (en) | 2018-05-15 | 2021-03-16 | Samsung Electronics Co., Ltd. | Method for rapid reference object storage format for chroma subsampled images |
| US11449256B2 (en) | 2018-05-15 | 2022-09-20 | Samsung Electronics Co., Ltd. | Method for accelerating image storing and retrieving differential latency storage devices based on access rates |
| CN110868594B (zh) | 2018-08-28 | 2023-04-07 | 北京字节跳动网络技术有限公司 | 分割方法的冗余移除 |
| US10530387B1 (en) * | 2018-10-22 | 2020-01-07 | Uber Technologies, Inc. | Estimating an optimal ordering for data compression |
| US10728557B2 (en) | 2018-10-24 | 2020-07-28 | Sony Corporation | Embedded codec circuitry for sub-block based entropy coding of quantized-transformed residual levels |
| WO2020156573A1 (en) | 2019-02-03 | 2020-08-06 | Beijing Bytedance Network Technology Co., Ltd. | Condition-dependent unsymmetrical quad-tree partitioning |
| US10939107B2 (en) | 2019-03-01 | 2021-03-02 | Sony Corporation | Embedded codec circuitry for sub-block based allocation of refinement bits |
| CN110430398B (zh) * | 2019-08-06 | 2021-01-19 | 杭州微帧信息科技有限公司 | 一种基于强化学习的视频编码分布式方法 |
| WO2021047542A1 (en) * | 2019-09-09 | 2021-03-18 | Beijing Bytedance Network Technology Co., Ltd. | Recursive splitting of video coding blocks |
| CN111212292B (zh) * | 2020-01-16 | 2023-04-28 | 郑州轻工业大学 | 基于h.266的自适应cu分区和跳过模式方法 |
| CN111277824B (zh) * | 2020-02-12 | 2023-07-25 | 腾讯科技(深圳)有限公司 | 图像预测处理方法、装置、终端及计算机可读存储介质 |
| CN111629206A (zh) * | 2020-05-25 | 2020-09-04 | 腾讯科技(深圳)有限公司 | 视频编码方法、视频播放方法、相关设备及介质 |
| US12015785B2 (en) * | 2020-12-04 | 2024-06-18 | Ofinno, Llc | No reference image quality assessment based decoder side inter prediction |
| CN112714314B (zh) * | 2020-12-28 | 2022-07-26 | 杭州电子科技大学 | 一种多类型树结构块划分模式抉择提前终止方法 |
| CN113613006B (zh) * | 2021-07-30 | 2023-08-18 | 浙江裕瀚科技有限公司 | 一种视频编码的方法、系统和装置 |
| US11700382B1 (en) * | 2021-11-03 | 2023-07-11 | Meta Platforms, Inc. | Systems and methods for improving mode decisions in hardware video encoders |
Family Cites Families (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1582060A4 (en) | 2003-01-10 | 2009-09-23 | Thomson Licensing | DECISION-MAKING IN FAST MODE FOR CODING BETWEEN FRAMES |
| EP1639827B1 (en) * | 2003-06-25 | 2010-04-14 | Thomson Licensing | Fast mode-decision encoding for interframes |
| KR20050061762A (ko) * | 2003-12-18 | 2005-06-23 | 학교법인 대양학원 | 부호화 모드 결정방법, 움직임 추정방법 및 부호화 장치 |
| CN101099394B (zh) | 2004-11-04 | 2010-08-18 | 汤姆森特许公司 | 用于视频编码器中b帧的快速模式决策的方法和装置 |
| TWI256258B (en) | 2004-12-16 | 2006-06-01 | Ind Tech Res Inst | Method to speed up the mode decision of video coding |
| US8155189B2 (en) * | 2005-10-19 | 2012-04-10 | Freescale Semiconductor, Inc. | System and method of coding mode decision for video encoding |
| US20070133690A1 (en) | 2005-12-13 | 2007-06-14 | Jun Xin | Adaptive complexity control for motion estimation during video encoding |
| JP4677932B2 (ja) * | 2006-03-06 | 2011-04-27 | 日本電気株式会社 | 動画像符号化方法及び動画像符号化装置とプログラムならびに媒体 |
| KR101228109B1 (ko) | 2006-07-24 | 2013-01-31 | 삼성전자주식회사 | 움직임 예측장치 및 방법과 이를 채용하는 영상 부호화장치및 방법 |
| US8467448B2 (en) | 2006-11-15 | 2013-06-18 | Motorola Mobility Llc | Apparatus and method for fast intra/inter macro-block mode decision for video encoding |
| US8311120B2 (en) | 2006-12-22 | 2012-11-13 | Qualcomm Incorporated | Coding mode selection using information of other coding modes |
| CN101731012B (zh) | 2007-04-12 | 2013-10-16 | 汤姆森特许公司 | 用于视频编码器中的快速几何模式判定的方法和设备 |
| KR100771641B1 (ko) * | 2007-04-23 | 2007-10-30 | 주식회사세오 | H.264 고속 모드 결정 방법 |
| JP4921239B2 (ja) | 2007-05-09 | 2012-04-25 | キヤノン株式会社 | 画像処理装置およびその方法 |
| JP4709179B2 (ja) * | 2007-05-14 | 2011-06-22 | 日本電信電話株式会社 | 符号化パラメータ選択方法,符号化パラメータ選択装置,符号化パラメータ選択プログラムおよびその記録媒体 |
| KR100901874B1 (ko) * | 2007-07-11 | 2009-06-09 | 한국전자통신연구원 | 비디오 인코딩을 위한 인터 모드 결정 방법 |
| US8582652B2 (en) * | 2007-10-30 | 2013-11-12 | General Instrument Corporation | Method and apparatus for selecting a coding mode |
| KR101306834B1 (ko) | 2008-09-22 | 2013-09-10 | 에스케이텔레콤 주식회사 | 인트라 예측 모드의 예측 가능성을 이용한 영상 부호화/복호화 장치 및 방법 |
| WO2010044757A1 (en) * | 2008-10-17 | 2010-04-22 | Agency For Science, Technology And Research | Method for encoding a digital picture, encoder, and computer program element |
| KR20110017719A (ko) * | 2009-08-14 | 2011-02-22 | 삼성전자주식회사 | 비디오 부호화 방법 및 장치, 비디오 복호화 방법 및 장치 |
| KR101504887B1 (ko) | 2009-10-23 | 2015-03-24 | 삼성전자 주식회사 | 데이터 단위 레벨의 독립적 파싱 또는 복호화에 따른 비디오 복호화 방법 및 그 장치, 그리고 데이터 단위 레벨의 독립적 파싱 또는 복호화를 위한 비디오 부호화 방법 및 그 장치 |
| CN101710996B (zh) * | 2009-12-15 | 2011-06-01 | 山东大学 | 一种将时域与纹理相结合的快速帧间预测模式选择算法 |
| EP2343899A1 (en) | 2010-01-08 | 2011-07-13 | Research In Motion Limited | Method and device for video transcoding using quad-tree based mode selection |
| US8995527B2 (en) | 2010-02-19 | 2015-03-31 | Qualcomm Incorporated | Block type signalling in video coding |
| US20120195364A1 (en) | 2011-01-31 | 2012-08-02 | Apple Inc. | Dynamic mode search order control for a video encoder |
| CN102811346B (zh) * | 2011-05-31 | 2015-09-02 | 富士通株式会社 | 编码模式选择方法和系统 |
| US9282338B2 (en) | 2011-06-20 | 2016-03-08 | Qualcomm Incorporated | Unified merge mode and adaptive motion vector prediction mode candidates selection |
| KR20170005464A (ko) * | 2011-08-30 | 2017-01-13 | 노키아 테크놀로지스 오와이 | 비디오 코딩 및 디코딩을 위한 장치, 방법 및 컴퓨터 프로그램 |
| GB2495990A (en) * | 2011-10-28 | 2013-05-01 | Canon Kk | Motion compensated image coding with omission of coding mode cost calculation for a motion predictor in a set. |
| CN102790878B (zh) * | 2011-12-07 | 2015-02-18 | 北京邮电大学 | 一种视频编码的编码模式选择方法及装置 |
| KR101842551B1 (ko) | 2012-01-26 | 2018-03-28 | 한국전자통신연구원 | 모션 파티션 모드 판정 방법 및 부호화기 |
| GB2498992B (en) | 2012-02-02 | 2015-08-26 | Canon Kk | Method and system for transmitting video frame data to reduce slice error rate |
| US9544592B2 (en) | 2012-02-10 | 2017-01-10 | Texas Instruments Incorporated | Methods and systems for encoding pictures associated with video data |
| GB2499865B (en) | 2012-03-02 | 2016-07-06 | Canon Kk | Method and devices for encoding a sequence of images into a scalable video bit-stream, and decoding a corresponding scalable video bit-stream |
| GB2506590B (en) | 2012-09-28 | 2016-05-04 | Canon Kk | Method and device for deriving a set of enabled coding modes |
| KR20140072231A (ko) | 2012-11-26 | 2014-06-13 | 한국전자통신연구원 | 율-왜곡 비용의 확률분포를 이용한 비디오 부호화기의 고속 예측모드 결정 방법 |
| US9426473B2 (en) * | 2013-02-01 | 2016-08-23 | Qualcomm Incorporated | Mode decision simplification for intra prediction |
| CN103384325A (zh) * | 2013-02-22 | 2013-11-06 | 张新安 | 一种avs-m视频编码快速帧间预测模式选择方法 |
| WO2014172387A1 (en) | 2013-04-15 | 2014-10-23 | Huawei Technologies Co., Ltd. | Method and apparatus of depth prediction mode selection |
| US20160073133A1 (en) * | 2013-04-17 | 2016-03-10 | Samsung Electronics Co., Ltd. | Multi-view video encoding method using view synthesis prediction and apparatus therefor, and multi-view video decoding method and apparatus therefor |
| WO2015006951A1 (en) | 2013-07-18 | 2015-01-22 | Mediatek Singapore Pte. Ltd. | Methods for fast encoder decision |
| US10104395B2 (en) * | 2013-10-14 | 2018-10-16 | Texas Instruments Incorporated | Intra block copy (IntraBC) cost estimation |
| CN103702122B (zh) * | 2013-12-18 | 2017-07-21 | 华为技术有限公司 | 编码模式选择方法、装置及编码器 |
| US20150189269A1 (en) * | 2013-12-30 | 2015-07-02 | Google Inc. | Recursive block partitioning |
| US9924183B2 (en) * | 2014-03-20 | 2018-03-20 | Nanjing Yuyan Information Technology Ltd. | Fast HEVC transcoding |
| CN103997646B (zh) * | 2014-05-13 | 2018-05-01 | 北京航空航天大学 | 一种高清视频编码中快速帧内预测模式选择方法 |
| US10085027B2 (en) | 2015-03-06 | 2018-09-25 | Qualcomm Incorporated | Adaptive mode checking order for video encoding |
-
2015
- 2015-06-11 US US14/737,252 patent/US10085027B2/en active Active
- 2015-06-11 US US14/737,271 patent/US9883187B2/en not_active Expired - Fee Related
-
2016
- 2016-03-03 CN CN201680012506.1A patent/CN107409217B/zh not_active Expired - Fee Related
- 2016-03-03 JP JP2017546091A patent/JP2018511225A/ja active Pending
- 2016-03-03 KR KR1020177024894A patent/KR20170126896A/ko unknown
- 2016-03-03 JP JP2017546226A patent/JP6334830B2/ja not_active Expired - Fee Related
- 2016-03-03 EP EP16709663.5A patent/EP3266205A1/en not_active Ceased
- 2016-03-03 CN CN201680013316.1A patent/CN107409218A/zh active Pending
- 2016-03-03 EP EP16710056.9A patent/EP3266206A1/en not_active Withdrawn
- 2016-03-03 KR KR1020177024893A patent/KR20170123632A/ko unknown
- 2016-03-03 WO PCT/US2016/020684 patent/WO2016144695A1/en active Application Filing
- 2016-03-03 WO PCT/US2016/020736 patent/WO2016144705A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN107409217B (zh) | 2020-02-21 |
| US20160261870A1 (en) | 2016-09-08 |
| US10085027B2 (en) | 2018-09-25 |
| CN107409217A (zh) | 2017-11-28 |
| EP3266205A1 (en) | 2018-01-10 |
| EP3266206A1 (en) | 2018-01-10 |
| JP2018511225A (ja) | 2018-04-19 |
| CN107409218A (zh) | 2017-11-28 |
| US20160261861A1 (en) | 2016-09-08 |
| WO2016144695A1 (en) | 2016-09-15 |
| KR20170126896A (ko) | 2017-11-20 |
| WO2016144705A1 (en) | 2016-09-15 |
| KR20170123632A (ko) | 2017-11-08 |
| US9883187B2 (en) | 2018-01-30 |
| JP2018511231A (ja) | 2018-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6334830B2 (ja) | ブロックの区分を用いた高速ビデオ符号化方法 | |
| KR102288109B1 (ko) | 비디오 압축에서의 양방향 예측 | |
| US11451773B2 (en) | Block-based adaptive loop filter (ALF) design and signaling | |
| TWI782904B (zh) | 合併用於視訊寫碼之用於多類別區塊之濾波器 | |
| US10412419B2 (en) | Adaptive filtering in video coding | |
| US10728548B2 (en) | Processing reference samples used for intra-prediction of a picture block | |
| AU2023204301A1 (en) | Video encoder, video decoder, and corresponding encoding and decoding methods | |
| US10334253B2 (en) | Sample adaptive offset scaling based on bit-depth | |
| JP2019515580A (ja) | イントラ予測モードのネイバーベースのシグナリング | |
| US10382755B2 (en) | Low complexity sample adaptive offset (SAO) coding | |
| JP2017521920A (ja) | ビデオコーディングにおけるパレットコード化ブロックの量子化パラメータ(qp)値とデルタqp値の決定 | |
| JP2017521919A (ja) | ビデオコーディングにおけるパレットコード化ブロックへのデブロッキングフィルタ処理の適用の決定 | |
| US20190089952A1 (en) | Bidirectional Weighted Intra Prediction | |
| JP2015512600A (ja) | クロマスライスレベルqpオフセットおよびデブロッキング | |
| US20130128971A1 (en) | Transforms in video coding | |
| US9998739B2 (en) | Optimization for encoding video data using non-square partitions | |
| US20170347126A1 (en) | Video debanding using adaptive filter sizes and gradient based banding detection | |
| WO2020041306A1 (en) | Intra prediction method and device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180309 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180309 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180426 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6334830 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |