JP6295650B2 - 音声信号処理装置及びプログラム - Google Patents
音声信号処理装置及びプログラム Download PDFInfo
- Publication number
- JP6295650B2 JP6295650B2 JP2013267711A JP2013267711A JP6295650B2 JP 6295650 B2 JP6295650 B2 JP 6295650B2 JP 2013267711 A JP2013267711 A JP 2013267711A JP 2013267711 A JP2013267711 A JP 2013267711A JP 6295650 B2 JP6295650 B2 JP 6295650B2
- Authority
- JP
- Japan
- Prior art keywords
- coherence
- filter coefficient
- arrival direction
- coherence filter
- microphones
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Obtaining Desirable Characteristics In Audible-Bandwidth Transducers (AREA)
- Circuit For Audible Band Transducer (AREA)
Description
以下、本発明による音声信号処理装置及びプログラムの第1の実施形態を、図面を参照しながら詳述する。第1の実施形態の音声処理装置は、コヒーレンスフィルタ法を適用して、音声信号中に含まれる雑音成分を抑圧するものである。
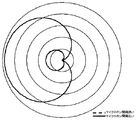
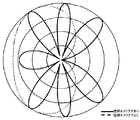
マイクロホン間隔が広がることに付随して指向性信号における低域成分の指向性が強くなる現象は、上述したように不可避である。マイクロホン間隔が、低域成分の指向性が強くなる程度に広い場合には、過度な抑圧処理が行われないように、第1の実施形態では、音質と抑圧性能とがほどほどに両立するような値に、コヒーレンスフィルタ係数を補正することとした。
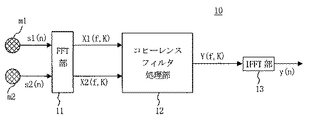
図3は、第1の実施形態に係る音声信号処理装置の構成を示すブロック図である。ここで、一対のマイクロホンm1及びm2を除いた部分は、ハードウェアで構成することも可能であり、また、CPUが実行するソフトウェア(音声信号処理プログラム)とCPUとで実現することも可能であるが、いずれの実現方法を採用した場合であっても、機能的には図3で表すことができる。

後述するコヒーレンスフィルタ処理部12においては、周波数領域信号X1(f,K)及びX2(f,K)のうち、周波数領域信号X1(f,K)をメインとし、周波数領域信号X2(f,K)をサブとして処理を行うが(後述する(7)式参照)、周波数領域信号X2(f,K)をメインとし、周波数領域信号X1(f,K)をサブとして処理を行っても良い。
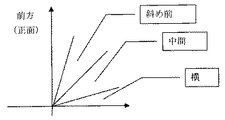
ここで、コヒーレンスフィルタ処理の物理的な意味を補足しておく。コヒーレンスフィルタ係数coef(f、K)(低域補正後のコヒーレンスフィルタ係数も同様)は、左右に死角を有する信号成分の相互相関であるので、相関が大きい場合には到来方位には偏りがない正面から到来する音声成分であり、相関が小さい場合には到来方位が右か左に偏った成分である、というように入力音声の到来方位とも対応付けられる。従って、コヒーレンスフィルタ係数coef(f、K)を乗算することは横から到来する雑音成分を抑圧する処理であるということができる。
次に、第1の実施形態の音声信号処理装置10の動作を、図面を参照しながら、全体動作、コヒーレンスフィルタ処理部12における詳細動作、到来方位推定部25における詳細動作の順に説明する。
以上のように、第1の実施形態によれば、マイクロホン間隔が広がって低域で形成される指向性が極端に強くなった場合にも、マイクロホン間隔が狭い場合のコヒーレンスフィルタ係数と、マイクロホン間隔が広い場合のコヒーレンスフィルタ係数に特有の挙動の違いに基づいて、マイクロホン間隔が狭い場合のコヒーレンスフィルタ係数に近い値に補正することができる。これにより、過度な抑圧処理によって音質が劣化することがなくなる。また、マイクロホン間隔の制限を緩和し、設計者が任意の間隔でマイクロホンアレイを構成することができるようになる。
上記第1の実施形態の説明においても、種々変形実施形態に言及したが、さらに、以下に例示するような変形実施形態を挙げることができる。
Claims (5)
- 一対のマイクロホンが捕捉して得た入力音声信号に含まれている雑音成分をコヒーレンスフィルタ処理によって抑制する音声信号処理装置において、
コヒーレンスフィルタ係数を算出するコヒーレンスフィルタ係数算出手段と、
上記入力音声信号に含まれている妨害音の到来方位を推定する到来方位推定手段と、
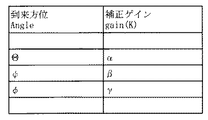
推定された到来方位に対応した補正ゲインを得て、低域のコヒーレンスフィルタ係数をその補正ゲインで補正する低域フィルタ係数補正手段と、
補正された低域のコヒーレンスフィルタ係数を含めた全帯域のコヒーレンスフィルタ係数を適用してコヒーレンスフィルタ処理を行うフィルタ処理実行手段とを有し、
到来方位に対応する上記補正ゲインは、一対のマイクロホンの間隔が狭い場合のコヒーレンスフィルタ係数に対する一対のマイクロホンの間隔が広い場合のコヒーレンスフィルタ係数の比率に基づいて決定されている
ことを特徴する音声信号処理装置。 - 上記到来方位推定手段は、
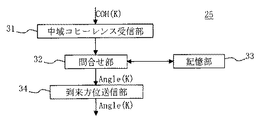
限定された帯域のコヒーレンスフィルタ係数を適用して限定帯域のコヒーレンスを算出する限定帯域コヒーレンス算出部と、
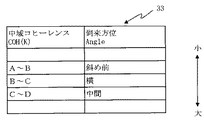
限定帯域のコヒーレンスの種々の値と到来方位とを予め対応付けており、算出された限定帯域のコヒーレンスに基づいて、対応付けられた到来方位を得て推定値として出力する到来方位取得部とを有する
ことを特徴とする請求項1に記載の音声信号処理装置。 - 一対のマイクロホンが捕捉して得た入力音声信号に含まれている雑音成分をコヒーレンスフィルタ処理によって抑制する音声信号処理プログラムであって、
コンピュータを、
コヒーレンスフィルタ係数を算出するコヒーレンスフィルタ係数算出手段と、
上記入力音声信号に含まれている妨害音の到来方位を推定する到来方位推定手段と、
推定された到来方位に対応した補正ゲインを得て、低域のコヒーレンスフィルタ係数をその補正ゲインで補正する低域フィルタ係数補正手段と、
補正された低域のコヒーレンスフィルタ係数を含めた全帯域のコヒーレンスフィルタ係数を適用してコヒーレンスフィルタ処理を行うフィルタ処理実行手段と
して機能させ、
到来方位に対応する上記補正ゲインは、一対のマイクロホンの間隔が狭い場合のコヒーレンスフィルタ係数に対する一対のマイクロホンの間隔が広い場合のコヒーレンスフィルタ係数の比率に基づいて決定されている
ことを特徴する音声信号処理プログラム。 - 一対のマイクロホンが捕捉して得た入力音声信号に含まれている妨害音の到来方位を推定する音声信号処理装置において、
少なくとも限定帯域のコヒーレンスフィルタ係数を算出するコヒーレンスフィルタ係数算出手段と、
限定帯域のコヒーレンスフィルタ係数を適用して限定帯域のコヒーレンスを算出する限定帯域コヒーレンス算出手段と、
限定帯域のコヒーレンスの種々の値と到来方位とを予め対応付けており、算出された限定帯域のコヒーレンスに基づいて、対応付けられた到来方位を得て推定値として出力する到来方位取得手段と、
推定された到来方位に対応した補正ゲインを得て、限定帯域のコヒーレンスフィルタ係数をその補正ゲインで補正する限定帯域フィルタ係数補正手段とを有し、
到来方位に対応する上記補正ゲインは、一対のマイクロホンの間隔が狭い場合のコヒーレンスフィルタ係数に対する一対のマイクロホンの間隔が広い場合のコヒーレンスフィルタ係数の比率に基づいて決定されている
ことを特徴とする音声信号処理装置。 - 一対のマイクロホンが捕捉して得た入力音声信号に含まれている妨害音の到来方位を推定する音声信号処理プログラムであって、
コンピュータを、
少なくとも限定帯域のコヒーレンスフィルタ係数を算出するコヒーレンスフィルタ係数算出手段と、
限定帯域のコヒーレンスフィルタ係数を適用して限定帯域のコヒーレンスを算出する限定帯域コヒーレンス算出手段と、
限定帯域のコヒーレンスの種々の値と到来方位とを予め対応付けており、算出された限定帯域のコヒーレンスに基づいて、対応付けられた到来方位を得て推定値として出力する到来方位取得手段と、
推定された到来方位に対応した補正ゲインを得て、限定帯域のコヒーレンスフィルタ係数をその補正ゲインで補正する限定帯域フィルタ係数補正手段として機能させ、
到来方位に対応する上記補正ゲインは、一対のマイクロホンの間隔が狭い場合のコヒーレンスフィルタ係数に対する一対のマイクロホンの間隔が広い場合のコヒーレンスフィルタ係数の比率に基づいて決定されている
ことを特徴とする音声信号処理プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013267711A JP6295650B2 (ja) | 2013-12-25 | 2013-12-25 | 音声信号処理装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013267711A JP6295650B2 (ja) | 2013-12-25 | 2013-12-25 | 音声信号処理装置及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015126279A JP2015126279A (ja) | 2015-07-06 |
| JP6295650B2 true JP6295650B2 (ja) | 2018-03-20 |
Family
ID=53536737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013267711A Active JP6295650B2 (ja) | 2013-12-25 | 2013-12-25 | 音声信号処理装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6295650B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022038673A1 (ja) * | 2020-08-18 | 2022-02-24 | 日本電信電話株式会社 | 収音装置、収音方法、プログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030061032A1 (en) * | 2001-09-24 | 2003-03-27 | Clarity, Llc | Selective sound enhancement |
| JP4247037B2 (ja) * | 2003-01-29 | 2009-04-02 | 株式会社東芝 | 音声信号処理方法と装置及びプログラム |
| JP4912036B2 (ja) * | 2006-05-26 | 2012-04-04 | 富士通株式会社 | 指向性集音装置、指向性集音方法、及びコンピュータプログラム |
| US8724829B2 (en) * | 2008-10-24 | 2014-05-13 | Qualcomm Incorporated | Systems, methods, apparatus, and computer-readable media for coherence detection |
| JP5691804B2 (ja) * | 2011-04-28 | 2015-04-01 | 富士通株式会社 | マイクロホンアレイ装置及び音信号処理プログラム |
| JP5838861B2 (ja) * | 2012-02-29 | 2016-01-06 | 沖電気工業株式会社 | 音声信号処理装置、方法及びプログラム |
-
2013
- 2013-12-25 JP JP2013267711A patent/JP6295650B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015126279A (ja) | 2015-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101597752B1 (ko) | 잡음 추정 장치 및 방법과, 이를 이용한 잡음 감소 장치 | |
| JP5817366B2 (ja) | 音声信号処理装置、方法及びプログラム | |
| US8891780B2 (en) | Microphone array device | |
| WO2014054314A1 (ja) | 音声信号処理装置、方法及びプログラム | |
| JP2004187283A (ja) | マイクロホン装置および再生装置 | |
| JP5838861B2 (ja) | 音声信号処理装置、方法及びプログラム | |
| JP5927887B2 (ja) | 非目的音抑制装置、非目的音抑制方法及び非目的音抑制プログラム | |
| KR20080000478A (ko) | 휴대 단말기에서 복수의 마이크들로 입력된 신호들의잡음을 제거하는 방법 및 장치 | |
| JP6221257B2 (ja) | 信号処理装置、方法及びプログラム | |
| JP6314475B2 (ja) | 音声信号処理装置及びプログラム | |
| JPWO2016076237A1 (ja) | 信号処理装置、信号処理方法および信号処理プログラム | |
| JP6295650B2 (ja) | 音声信号処理装置及びプログラム | |
| JP6221258B2 (ja) | 信号処理装置、方法及びプログラム | |
| JP6638248B2 (ja) | 音声判定装置、方法及びプログラム、並びに、音声信号処理装置 | |
| WO2016045706A1 (en) | Method and apparatus for generating a directional sound signal from first and second sound signals | |
| JP6221463B2 (ja) | 音声信号処理装置及びプログラム | |
| JP6631127B2 (ja) | 音声判定装置、方法及びプログラム、並びに、音声処理装置 | |
| JP6263890B2 (ja) | 音声信号処理装置及びプログラム | |
| US11495241B2 (en) | Echo delay time estimation method and system thereof | |
| JP6252274B2 (ja) | 背景雑音区間推定装置及びプログラム | |
| JP6544182B2 (ja) | 音声処理装置、プログラム及び方法 | |
| JP6903947B2 (ja) | 非目的音抑圧装置、方法及びプログラム | |
| JP2014164192A (ja) | 信号処理装置、方法及びプログラム | |
| JP6213324B2 (ja) | 音声信号処理装置及びプログラム | |
| JP2015025914A (ja) | 音声信号処理装置及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160816 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170616 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170627 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180123 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6295650 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |