JP6255865B2 - Sensor unit, electronic device, and moving object - Google Patents
Sensor unit, electronic device, and moving object Download PDFInfo
- Publication number
- JP6255865B2 JP6255865B2 JP2013208893A JP2013208893A JP6255865B2 JP 6255865 B2 JP6255865 B2 JP 6255865B2 JP 2013208893 A JP2013208893 A JP 2013208893A JP 2013208893 A JP2013208893 A JP 2013208893A JP 6255865 B2 JP6255865 B2 JP 6255865B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- sensor unit
- pedestal
- sensor device
- connector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Gyroscopes (AREA)
- Pressure Sensors (AREA)
- Mounting Of Printed Circuit Boards And The Like (AREA)
Description
本発明は、センサーユニット、それを備えた電子機器、および移動体に関する。 The present invention relates to a sensor unit, an electronic device including the sensor unit, and a moving body.
従来、例えば特許文献1に開示されているような、台座に支持された回路基板に駆動部を振動させる振動型角速度センサーや可動体を備えた加速度センサー等の慣性センサーやコネクターなどの電子部品が搭載され、回路基板や電子部品が蓋部材で覆われているセンサーモジュールが知られている。このセンサーモジュールでは、台座に設けられた複数の突出部によって基板が支持されている。また、このセンサーモジュールでは、蓋部材の側面に設けられた開口部にコネクターが露出している。センサーモジュールを搭載する電子機器の実装基板(制御回路)とセンサーモジュールとの電気的接続は、嵌め合わされたコネクターから延在するケーブルやフレキシブル配線基板などの接続部材によって行われる。 Conventionally, for example, as disclosed in Patent Document 1, electronic components such as an inertial sensor such as a vibration type angular velocity sensor that vibrates a drive unit on a circuit board supported by a pedestal or an acceleration sensor provided with a movable body, and a connector. There is known a sensor module that is mounted and a circuit board and electronic components are covered with a lid member. In this sensor module, the substrate is supported by a plurality of protrusions provided on the pedestal. In this sensor module, the connector is exposed at the opening provided on the side surface of the lid member. Electrical connection between the mounting board (control circuit) of the electronic device on which the sensor module is mounted and the sensor module is performed by a connecting member such as a cable or a flexible wiring board extending from the fitted connector.
しかしながら、前述の構成では、複数の突出部を有しているため、それぞれの高さにばらつきを生じ易く、これらの突出部を介して台座に支持されている基板と台座との位置関係がばらつく、所謂基板が支持される姿勢精度のばらつきを生じ易い。この姿勢精度にばらつきを生じると、センサーユニットを実装基板などに取り付けた際のセンサーデバイスの検出軸のばらつきとなりセンサーの検出精度が低下してしまう虞を有していた。また、前述の構成では、電子機器の実装基板とセンサーモジュールとの電気的接続が、嵌め合わされたコネクターから延在するケーブルやフレキシブル配線基板などの接続部材によって行われている。この接続部材は、コネクターから延在する部分が共振する共振周波数を有している。そして、共振周波数近傍の周波数の振動が加わると、共振状態となって振動を増幅してしまい、その振動がコネクターを介して回路基板、および慣性センサーに伝播する。具体的には、振動型角速度センサーの駆動部や加速度センサーの可動体に振動が伝搬し、慣性センサーの検出、出力特性に影響を与えてしまう虞を有していた。 However, in the above-described configuration, since the plurality of protrusions are provided, the height of each of the protrusions is likely to vary, and the positional relationship between the base and the base supported by the base via these protrusions varies. The so-called substrate is likely to vary in posture accuracy. If the posture accuracy varies, the detection axis of the sensor device may vary when the sensor unit is mounted on a mounting substrate or the like, and the detection accuracy of the sensor may be reduced. Further, in the above-described configuration, the electrical connection between the mounting board of the electronic device and the sensor module is performed by a connection member such as a cable or a flexible wiring board extending from the fitted connector. The connecting member has a resonance frequency at which a portion extending from the connector resonates. When a vibration having a frequency near the resonance frequency is applied, the resonance state is generated and the vibration is amplified, and the vibration propagates to the circuit board and the inertial sensor through the connector. Specifically, the vibration propagates to the drive unit of the vibration type angular velocity sensor and the movable body of the acceleration sensor, which may affect the detection and output characteristics of the inertial sensor.
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。 SUMMARY An advantage of some aspects of the invention is to solve at least a part of the problems described above, and the invention can be implemented as the following forms or application examples.
[適用例1]本適用例に係るセンサーユニットは、外面に配置されている電極を備えたセンサーデバイスと、前記センサーデバイスに接続されたコネクターと、が設けられた基板と、平面視で前記センサーデバイスと重なる位置に設けられた部品収納部と、前記部品収納部より厚い肉厚を有し、且つ交差する2方向に延在する基板接合部と、前記コネクターの少なくとも一部が露出する開口部と、が備えられた台座と、を備え、前記基板は、前記基板接合部と接続されていることを特徴とする。 Application Example 1 A sensor unit according to this application example includes a substrate provided with a sensor device including an electrode disposed on an outer surface, a connector connected to the sensor device, and the sensor in plan view. A component storage portion provided at a position overlapping with the device, a board joining portion that is thicker than the component storage portion and extends in two intersecting directions, and an opening through which at least a part of the connector is exposed And the base is connected to the substrate bonding portion.
本適用例によれば、部品収納部より厚い肉厚を有する基板接合部が、交差する2方向に延在して設けられている。そしてこの基板接合部にセンサーデバイスおよびコネクターが接続された基板が接続される。基板接合部は、肉厚が厚く交差する2方向に延在しているため剛性が高く、且つ台座の底面を基準として一体的に高さを揃えることができるため、高さのばらつきを抑えることができ、基板の接合姿勢を安定させることができる。これにより、台座の底面(実装基板への接続面)基準での基板の姿勢を揃える(ばらつきを小さくする)ことが可能となり、結果としてセンサーデバイスの検出軸方向のばらつきを抑えることができ、検出精度を安定させることができる。また、台座の開口部からコネクターが露出しているため、センサーユニットが接続される実装基板のコネクターとセンサーユニットのコネクターとを直接接続することができる。これにより、従来用いていた配線やフレキシブル配線基板などが不要となり、配線やフレキシブル配線基板の共振現象が基板を介して慣性センサーに伝播し、慣性センサーの特性に影響を与えることを防止することができる。 According to this application example, the board joint portion having a thickness larger than that of the component storage portion is provided so as to extend in two intersecting directions. Then, the substrate to which the sensor device and the connector are connected is connected to the substrate bonding portion. Since the board joint extends in two intersecting directions with a large thickness, it has high rigidity and can be made to have a uniform height based on the bottom surface of the pedestal, thus suppressing variations in height. And the bonding posture of the substrates can be stabilized. As a result, it is possible to align the posture of the substrate with respect to the bottom surface of the pedestal (connection surface to the mounting substrate) (to reduce the variation), and as a result, it is possible to suppress variations in the detection axis direction of the sensor device and detect Accuracy can be stabilized. Further, since the connector is exposed from the opening of the pedestal, the connector on the mounting substrate to which the sensor unit is connected and the connector of the sensor unit can be directly connected. This eliminates the need for previously used wiring and flexible wiring boards, and prevents the resonance phenomenon of wiring and flexible wiring boards from propagating to the inertial sensor through the board and affecting the characteristics of the inertial sensor. it can.
[適用例2]上記適用例に記載のセンサーユニットにおいて、前記基板は、互いに表裏関係にある第1面および第2面と、側面と、前記第1面の輪郭に沿って配置されている導電端子と、を備え、少なくとも一つの前記センサーデバイスは、前記外面が前記基板の前記側面と対向し、前記電極と前記導電端子とが導電体により接合されて前記基板に固定されていることが好ましい。 Application Example 2 In the sensor unit according to the application example described above, the substrate is disposed along a first surface and a second surface, side surfaces, and a contour of the first surface that are in a front-back relationship with each other. It is preferable that at least one of the sensor devices includes a terminal, the outer surface faces the side surface of the substrate, and the electrode and the conductive terminal are bonded to each other by a conductor and fixed to the substrate. .
本適用例によれば、センサーデバイスを基板の側面に対向して実装し、センサーデバイスの電極と基板の導電端子とを導電体により電気的かつ機械的に確実に固定することができ、既存のセンサーパッケージを用いて小型で低背なセンサーユニットを提供できる。 According to this application example, the sensor device can be mounted facing the side surface of the substrate, and the electrode of the sensor device and the conductive terminal of the substrate can be securely and electrically fixed by the conductor. A small and low-profile sensor unit can be provided using a sensor package.
[適用例3]上記適用例に記載のセンサーユニットにおいて、前記センサーデバイスと前記台座との間には、間隙を有していることが好ましい。 Application Example 3 In the sensor unit according to the application example described above, it is preferable that a gap is provided between the sensor device and the pedestal.
本適用例によれば、センサーデバイスと台座との間に間隙を設けることにより、外部から台座が受ける衝撃、あるいは変形などの応力が、センサーデバイスに直接伝わることを防止することができ、センサーデバイスの検出精度を高めることが可能となる。 According to this application example, by providing a gap between the sensor device and the pedestal, it is possible to prevent the impact received by the pedestal from the outside or stress such as deformation from being directly transmitted to the sensor device. It is possible to improve the detection accuracy of.
[適用例4]上記適用例に記載のセンサーユニットにおいて、前記部品収納部の前記側面に実装されたセンサーデバイスと平面視で重なる部分が、他の前記部品収納部よりも薄肉になっていることが好ましい。 Application Example 4 In the sensor unit according to the application example described above, a portion that overlaps the sensor device mounted on the side surface of the component storage portion in plan view is thinner than the other component storage portions. Is preferred.
本適用例によれば、基板の側面に実装されたセンサーデバイスと平面視で重なる部分の台座を薄肉とすることにより、センサーユニットの高さ方向の寸法を小さくすることができる。 According to this application example, the height of the sensor unit can be reduced by thinning the pedestal of the portion that overlaps the sensor device mounted on the side surface of the substrate in plan view.
[適用例5]上記適用例に記載のセンサーユニットにおいて、前記基板接合部は、前記部品収納部の周囲に設けられていることが好ましい。 Application Example 5 In the sensor unit according to the application example described above, it is preferable that the board joint portion is provided around the component storage portion.
本適用例によれば、基板が、その外周部において基板接合部に接合して支持されることから、基板のばたつきや撓みが抑えられ、基板に接続されているコネクターの脱着をよりスムースに、確実に行うことができる。 According to this application example, since the board is supported by being joined to the board joint portion at the outer peripheral portion thereof, flapping and bending of the board are suppressed, and the attachment / detachment of the connector connected to the board is more smoothly performed. It can be done reliably.
[適用例6]上記適用例に記載のセンサーユニットにおいて、前記コネクターの外周部と前記開口部の周縁との間には、充填材が設けられていることが好ましい。 Application Example 6 In the sensor unit according to the application example described above, it is preferable that a filler is provided between the outer periphery of the connector and the periphery of the opening.
本適用例によれば、コネクターの外周部と開口部の周縁との間に設けられている充填材によって、コネクターの外周部と開口部の周縁との間の開口が塞がれるため、開口からの水分、塵などの異物侵入を防止することが可能となる。 According to this application example, the opening provided between the outer periphery of the connector and the periphery of the opening is blocked by the filler provided between the outer periphery of the connector and the periphery of the opening. It is possible to prevent foreign matter such as moisture and dust from entering.
[適用例7]上記適用例に記載のセンサーユニットにおいて、前記コネクターの入出力面は、前記台座の内側に位置していることが好ましい。 Application Example 7 In the sensor unit according to the application example described above, it is preferable that the input / output surface of the connector is located inside the pedestal.
本適用例によれば、コネクターが、台座の前記基板が接続される面の反対面、即ち台座の実装基板側の面から突出していない。これにより、不測の事態によるコネクターの破損を防止することが可能となる。 According to this application example, the connector does not protrude from the surface of the pedestal opposite to the surface to which the substrate is connected, that is, the surface of the pedestal on the mounting substrate side. Thereby, it is possible to prevent the connector from being damaged due to an unexpected situation.
[適用例8]上記適用例に記載のセンサーユニットにおいて、前記基板を覆う蓋部材を備え、前記蓋部材は前記台座に接続されていることが好ましい。 Application Example 8 In the sensor unit according to the application example described above, it is preferable that a lid member that covers the substrate is provided, and the lid member is connected to the pedestal.
本適用例によれば、蓋部材が台座に接続されているため、この蓋部材により、基板に接続・装着されているセンサーデバイスやコネクターなどの部品を保護することができる。また、水分、塵などの異物侵入を防止することが可能となり、センサーユニットの信頼性を向上させることができる。 According to this application example, since the lid member is connected to the pedestal, the lid member can protect components such as a sensor device and a connector that are connected to and mounted on the substrate. In addition, foreign matter such as moisture and dust can be prevented from entering, and the reliability of the sensor unit can be improved.
[適用例9]本適用例に係る電子機器は、上記適用例のいずれか一例に記載のセンサーユニットを備えていることを特徴とする。 Application Example 9 An electronic apparatus according to this application example includes the sensor unit according to any one of the application examples described above.
本適用例によれば、センサーデバイスに外部から加わる共振振動、応力変動などが抑制され、より安定した測定を行うことができると共に、センサーデバイスの検出軸のばらつきが抑制され、センサーの検出精度を向上させたセンサーユニットを備えているため、より信頼性の高い電子機器を提供することが可能となる。 According to this application example, resonance vibration and stress fluctuation applied to the sensor device from the outside are suppressed, and more stable measurement can be performed, variation in the detection axis of the sensor device is suppressed, and sensor detection accuracy is improved. Since the improved sensor unit is provided, a more reliable electronic device can be provided.
[適用例10]本適用例に係る移動体は、上記適用例のいずれか一例に記載のセンサーユニットを備えていることを特徴とする。 Application Example 10 A moving object according to this application example includes the sensor unit according to any one of the application examples described above.
本適用例によれば、センサーデバイスに外部から加わる共振振動、応力変動などが抑制され、より安定した測定を行うことができると共に、センサーデバイスの検出軸のばらつきが抑制され、センサーの検出精度を向上させたセンサーユニットを備えているため、より信頼性の高い移動体を提供することが可能となる。 According to this application example, resonance vibration and stress fluctuation applied to the sensor device from the outside are suppressed, and more stable measurement can be performed, variation in the detection axis of the sensor device is suppressed, and sensor detection accuracy is improved. Since the improved sensor unit is provided, a more reliable moving body can be provided.
以下、添付図面を参照しつつ本発明の実施形態を説明する。 Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings.
(第1実施形態)
(センサーユニットの構成)
図1は、第1実施形態に係るセンサーユニットの外観を概略的に示す図であり、図1(a)は平面図、図1(b)は正断面図、図1(c)は底面図である。なお、図1(a)では、図を見易くするため、蓋部材としてのキャップを省略した図としている。また、図2は、第1実施形態における台座の概略を示す斜視図である。
(First embodiment)
(Configuration of sensor unit)
FIG. 1 is a diagram schematically showing an external appearance of a sensor unit according to the first embodiment. FIG. 1A is a plan view, FIG. 1B is a front sectional view, and FIG. 1C is a bottom view. It is. In FIG. 1A, a cap as a lid member is omitted in order to make the drawing easier to see. FIG. 2 is a perspective view schematically showing a pedestal in the first embodiment.
図1に示すように、第1実施形態に係るセンサーユニット10は、センサーデバイスとしての第1センサーデバイス23と、第1センサーデバイス23に接続されたコネクター14とが設けられた基板11と、基板11を載置し且つコネクター14が露出する開口部としての貫通孔13を備えた台座20と、を含む。また、センサーユニット10は、台座20に接続されて基板11を覆う蓋部材としてのキャップ24を備えている。第1センサーデバイス23は、基板11と台座20との間に設けられた間隙である部品収納部19と平面視(図示Z軸方向から見たとき)で重なる位置に配置されている。なお、本実施形態では、第1センサーデバイスとして慣性センサーを用いた例で説明する。以下、構成部材について他の構成部材も含め詳細を説明する。
As shown in FIG. 1, the
(基板)
基板11は、表裏に主面が設けられ、一方の主面である第1面11aと、第1面11aと表裏関係にある他方の主面である第2面11bと、第1面11aと第2面11bとを繋ぐ側面を備えている。そして、基板11は、後述する台座20の基板接合部22a,22b,22cと、図中ハッチングで示す接続領域R1の位置で接続されている。基板11は、例えば樹脂やセラミックといった絶縁体から形成される。基板11の第1面11aおよび第2面11bには、例えばめっき成膜で導電材から形成される配線パターン(実装配線や導電端子、電極など)が形成されているが、図示を省略している。
(substrate)
The
台座20に接続されている基板11の部品収納部19と平面視(Z軸方向視)で重なる領域における第1面11aには、第1センサーデバイス23、および第2センサーデバイス18が実装されている。慣性センサーである第1センサーデバイス23は、平たい略直方体の外形を有しており、外面の輪郭は長方形に形成されている。第1センサーデバイス23は、図示しない複数の電極としての外部電極が外面に配置されている。そして、第1センサーデバイス23は、部品収納部19と平面視で重なる領域にあって、外面としての底面が基板11の第1面11aに重ねられるように配置される。そして、第1センサーデバイス23は、外面に設けられている電極と基板11に設けられた導電端子とが電気的接続を取って基板11に実装される。実装における接続には、例えばはんだ材といった接合材が用いられる。第1センサーデバイス23は、一軸の検出軸50を有する角速度センサー、すなわちジャイロセンサーから構成される。角速度センサーでは、検出軸50が底面に直交しており、検出軸50回りの角速度が検出される。なお、本例では、第1センサーデバイス23を角速度センサーとして一つ用いる構成を例示したが、後述する第2実施形態のように第1センサーデバイス23と同様なセンサーデバイスを複数用いて、多軸方向の検出軸回りの角速度を検出することが可能な構成とすることもできる。例えば、直交する三軸方向の角速度を検出する場合には、それぞれのセンサーデバイスを、それぞれ直交する三方向に底面を向けて基板11に実装することで実現することができる。
A
第2センサーデバイス18は、例えば、加速度センサーで構成されている。本例では、一軸(検出軸50)方向の加速度を検出可能なセンサーを例示しており、検出軸50に沿って加速度を検出することができる。なお、第2センサーデバイス18は、多軸方向の加速度を検出可能な、例えば三軸加速度センサーで構成されてもよい。三軸加速度センサーを用いれば、直交三軸に沿って加速度を検出することができる。
The
基板11の主面の内で、第1面11aと表裏関係にある第2面11bには、コネクター14、チップ抵抗やチップコンデンサーといったその他の電子部品15、およびICチップ(集積回路)17などが実装されている。実装における接続には、例えば、はんだ材といった接合材が用いられる。なお、チップ抵抗またはチップコンデンサーをセンサーデバイスからの出力特性の改善に用いてもよい。また、コネクター14、その他の電子部品15、およびICチップ(集積回路)17などは、図示しない配線パターンで相互に電気的に接続される。なお、コネクター14は、その底面(固定面)が基板11の第2面と重なるように配置され、基板11の第2面11bに取り付けられている。このように、コネクター14が取り付けられることで、第1センサーデバイス23の検出軸50の方向とコネクター14の挿入方向とを、基板11を介して合わせることが可能となる。
Of the main surface of the
なお、上述では、基板11の第1面11aに、第1センサーデバイス23、および第2センサーデバイス18が実装され、第2面11bに、コネクター14、電子部品15、およびICチップ(集積回路)17などが実装されている例で説明したが、実装する面、および組み合わせを特定するものではない。例えば、第1面11aに、電子部品15、およびICチップ(集積回路)17などが実装され、第2面11bに、コネクター14、第1センサーデバイス23、および第2センサーデバイス18などが実装されている構成であってもよい。
In the above description, the
(台座)
ここで、台座20について、図2も加えて参照しながら詳細を説明する。台座20は、基板11の第2面11bと対向するように設けられている。台座20は、基板11の第2面11bと対向するように設けられた板状の基体25と、基体25の外周に沿って基体25から基板11の第2面11bに向かって突出する、基板接合部22a,22b,22cとが設けられている。台座20は、下面(外底面)20bと、下面20bと表裏関係であって基体25の内底面である上面20aと、基板接合部22a,22b,22cの上面である基板11との接合面22fとを有している。基板接合部22a,22b,22cのそれぞれの接合面22fは、同一面で形成されている。
(pedestal)
Here, the details of the
基板接合部22a,22b,22cは、基体25の厚みH1(肉厚:上面20aと下面20bとの厚さ)より大きな厚みH2(肉厚:接合面22fと下面20bとの厚さ)を有している。即ち、基板接合部22a,22b,22cは、基体25の上面20aから突出している。また、本例では、X軸方向の端部にあってY軸方向に延びる基板接合部22aと、Y軸方向の両端部にあってX軸方法に延びる基板接合部22b,22cとで突出部22が形成されている。そして、突出している基板接合部22a,22b,22cの内側面と基体25の上面20aとで形成される空間領域が部品収納部19となる。
The
台座20の基板接合部22aには、接合面22fから下面20bに貫通する貫通孔13が設けられている。貫通孔13は、後述するように基板11が台座20に接続された際に、基板11に接続されているコネクター14を収納するように設けられている。貫通孔13は、コネクター14の外形よりも一回り大きな形状を有した孔である。本例の貫通孔13は、矩形状の開口を有した孔である。さらに、台座20には、基体25の外周端部に薄肉状に設けられた鍔部21が設けられている。
A through
そして、基板11の外周部およびコネクター14を挿入する貫通孔13の外周部を含む接続領域R1において、基板11が基板接合部22a,22b,22c上に接続されることにより、台座20に基板11が支持される。基板11の接続方法は特に限定されないが、例えば接着剤による接続、あるいはネジ止めによる固定などを用いることができる。なお、接着剤による固定とネジ止めとを併用するのが好ましく、これにより、突出部22への基板11の固定を確実に行うことができる。また、台座20と基板11との間に接着剤の層が介在するため、台座20からの振動を接着剤が吸収、緩和し、基板11の不要な振動が抑制される。その結果、センサーユニット10の検出精度がより向上する。
And in connection area | region R1 containing the outer peripheral part of the board |
なお、基板接合部22a,22b,22cは、少なくとも交差する2方向に延在していればよく、基板11を確実に接続することが可能である。例えば、X軸方向、Y軸方向のそれぞれに複数の突起部が設けられてもよいし、基板接合部22aのY軸方向の中央部からX軸方向に向かって延在する一つの突起部が設けられている構成でもよい。このように、基板11が、その外周部において、部品収納部19の周囲に設けられている基板接合部22a,22b,22cに接合して支持されることから、基板11のばたつきや撓みが抑えられ、基板11に接続されているコネクター14の脱着をよりスムースに、確実に行うことができる。また、コネクター14の周囲で基板11と台座20とが接合されることから、コネクター14の接続されている周辺の基板11が撓み難くなり、コネクター14の脱着をよりスムースに、確実に行うことができる。
The
上面20aを基準としたときの突出部22の高さは、突出部22に基板11が接続されたとき、コネクター14の入出力面14aが、貫通孔13の内に収まるように設定される。換言すれば、突出部22に基板が接続されたとき、コネクター14の入出力面14aが基体25の下面20b(台座20の下面)より内側(上面20a側)に位置している。このように構成することで、不測の事態が起こってもコネクター14に衝撃や負荷が加わることが防止でき、コネクター14の破損を防止することが可能となる。なお、貫通孔13とコネクター14の外周部との隙間には、充填材16が配設されている。このように充填材16によって隙間が埋められていることにより、台座20の下面(基体25の下面20b)への開口部が塞がれるため、台座20の下面側から基板11と台座20との間に設けられた間隙である部品収納部19への水分、塵などの異物侵入を防止することが可能となる。
The height of the protruding
台座20をこのような構成とすることにより、基板11を簡単に支持することができるとともに、基板11と基体25との間に、チップ抵抗やチップコンデンサーといったその他の電子部品15、およびICチップ(集積回路)17などを収容するスペース(部品収納部19)を確保することができる。このようにして基板11を固定すると、基板11と基体25との間に空間が形成され、当該空間内に、電子部品15、およびICチップ(集積回路)17などが収容される。これにより、これら部品と台座20との接触が防止され、センサーユニット10の信頼性が向上する。また、鍔部21には、後述する蓋部材としてのキャップ24が接合されている。キャップ24は、例えばエポキシ樹脂を基材とした樹脂接着剤などを用いることにより、容易に台座20に接合することができる。
By configuring the
このような台座20の構成材料としては、特に限定されないが、制振特性を有する材料であるのが好ましい。これにより、基板11の不要な振動が抑えられ、第1センサーデバイス23、および第2センサーデバイス18などの検出精度が向上する。このような材料としては、例えば、マグネシウム合金、鉄系合金、銅合金、マンガン合金、Ni−Ti系合金などの各種制振合金が挙げられる。
The constituent material of the
(蓋部材)
蓋部材としてのキャップ24は、箱状をなしており、基板11を覆うように鍔部21の部分で台座20に固定されている。キャップ24は、台座20の鍔部21に沿った略矩形状の開口を有し、その開口が台座20に向かうように配置され、樹脂接着剤などにより台座20に接合されている。なお、キャップ24の台座20への接合方法は、ネジ止めを用いてもよい。
(Cover member)
The
このようなキャップ24の構成材料としては、特に限定されず、例えば、ポリエチレン、ポリプロピレン、エチレン−プロピレン共重合体等のポリオレフィン、ポリ塩化ビニル、ポリスチレン、ポリアミド、ポリイミド、ポリカーボネート、ポリ−(4−メチルペンテン−1)、アイオノマー、アクリル系樹脂、ポリメチルメタクリレート、アクリロニトリル−ブタジエン−スチレン共重合体(ABS樹脂)、アクリロニトリル−スチレン共重合体(AS樹脂)、ブタジエン−スチレン共重合体、ポリエチレンテレフタレート(PET)、ポリブチレンテレフタレート(PBT)等のポリエステル、ポリエーテル、ポリエーテルケトン(PEK)、ポリエーテルエーテルケトン(PEEK)、ポリエーテルイミド、ポリアセタール(POM)、ポリフェニレンオキシド、ポリサルフォン、ポリエーテルサルフォン、ポリフェニレンサルファイド、ポリアリレート、芳香族ポリエステル(液晶ポリマー)、ポリテトラフルオロエチレン、ポリフッ化ビニリデン、その他フッ素系樹脂、エポキシ樹脂、フェノール樹脂、ユリア樹脂、メラミン樹脂、シリコーン樹脂、ポリウレタン等、またはこれらを主とする共重合体、ブレンド体、ポリマーアロイ等が挙げられ、これらのうちの1種または2種以上を組み合わせて用いることができる。また、アルミニウム、ステンレス、鉄系合金、銅系合金などの薄板に表面処理を施した材料を用い、プレス成型などによって形成されたキャップ24を適用することもできる。
The constituent material of such a
以上説明したセンサーユニット10を実装基板に実装する構成について、図3を用いて説明する。図3は、センサーユニットの実装例を示す正断面図である。なお、同図においては、上述の実施形態と同じ構成には同符号を付してあり、また実装基板に係る構成は2点鎖線によって表してある。また、上述の実施形態と同じ構成の説明は省略する。
A configuration for mounting the
図3に示すように、センサーユニット10は、コネクター14(オス型コネクター)に実装基板30側のコネクター31(メス型コネクター)が挿入されるとともに、実装基板30の上面30aに台座20の下面20bが重なるように配置されて接続されている。このように、センサーユニット10のコネクター14と実装基板30のコネクター31とを直接接続する。なお、コネクター14がオス型コネクター、コネクター31がメス型コネクターの例で説明したが、逆の構成、即ちコネクター14がメス型コネクター、コネクター31がオス型コネクターであってもよい。
As shown in FIG. 3, in the
また、センサーユニット10の外周下部(図中符号Wで示す範囲)を接着剤28などによって接合してもよい。この接合によって、センサーユニット10を実装基板30により強固に接合することができる。なお、接着剤28は、センサーユニット10の底面(台座20の基体25の下面20b)と実装基板30との間に施してもよい。接着剤28は、センサーユニット10の外周下部の全周に亘って施すことでシール効果が生じる。このように、接着剤28をセンサーユニット10の外周下部の全周に亘って施すことでセンサーユニット10の底面(台座20の基体25の下面20b)に位置する貫通孔13からの異物侵入を防止することが可能となる。
Further, the lower part of the outer periphery of the sensor unit 10 (the range indicated by the symbol W in the figure) may be joined by the adhesive 28 or the like. By this bonding, the
また、センサーユニット10の外周下部(図中符号Wで示す範囲)に位置するキャップ24の表面に、接着剤28の濡れ性を向上させるための処理を施すことが好ましい。この処理方法としては、ホーニング、あるいはエッチングなどによりキャップ24の表面を粗くする処理(例えば、MAT処理)などを用いることができる。また、キャップ24の材質がアルミニウムを用いている場合には、図中符号Wで示す範囲を除きアルマイト処理を施し、図中符号Wで示す範囲にアルマイト処理を施さない方法を適用することができる。なお、符号Wで示す範囲は、キャップ24の開口する端から1mm程度であることが好ましい。
Moreover, it is preferable to perform the process for improving the wettability of the
このように、センサーユニット10の外周下部(図中符号Wで示す範囲)の処理を行うことにより、図中符号Wで示す範囲における接着剤28の濡れ性を向上させることができ、接着剤の塗布を確実に行うことが可能となる。また、図中符号Wで示す範囲以外への接着剤28の流れ出しを防止することができる。これらにより、接着剤28の塗布量を安定させ、シール効果をより確実にすることができる。
In this way, by performing the processing of the lower outer periphery of the sensor unit 10 (the range indicated by the symbol W in the drawing), the wettability of the adhesive 28 in the range indicated by the symbol W in the drawing can be improved. Application can be performed reliably. Further, it is possible to prevent the adhesive 28 from flowing out of the range indicated by the symbol W in the drawing. By these, the application quantity of the
上述した第1実施形態のセンサーユニット10によれば、部品収納部19より厚い肉厚を有する基板接合部22aと基板接合部22bおよび基板接合部22cとが、交差する2方向(X軸方向、Y軸方向)に延在して設けられている。そしてこの基板接合部22a,22b,22cに、例えば第1センサーデバイス23やコネクター14が接続された基板11が接続される。基板接合部22a,22b,22cは、肉厚が厚く交差する2方向に延在しているため剛性が高く、且つ台座20の底面(下面20b)を基準として一体的に接合面22fの高さを揃えることができるため、高さのばらつきを抑えることができ、基板11の接合姿勢を安定させることができる。これにより、台座20の底面(実装基板への接続面である下面20b)基準での基板11の姿勢を揃える(ばらつきを小さくする)ことが可能となり、結果として第1センサーデバイス23などのセンサーデバイスの検出軸方向のばらつきを抑えることができ、検出精度を安定させることができる。
According to the
また、センサーユニット10によれば、台座20の開口部としての貫通孔13の中にコネクター14が露出しているため、センサーユニット10が接続される実装基板30のコネクター31とセンサーユニット10のコネクター14とを直接接続することができる。これにより、従来用いていた配線やフレキシブル配線基板などが不要となり、配線やフレキシブル配線基板の共振現象が基板を介して慣性センサーとしての第1センサーデバイス23に伝播し、第1センサーデバイス23の特性に影響を与えることが生じなくなる。また、第1センサーデバイス23は、台座20と基板11とが接続されている台座接合領域R1以外の位置で基板11に接続されているため、台座20から受ける応力変動(熱歪み、振動、衝撃など)が第1センサーデバイス23に伝播し難い。したがって、本例のセンサーユニット10は、外部からの共振振動、応力変動などを抑制し、より安定した測定を行うことが可能となる。
Further, according to the
(第2実施形態)
次に、センサーユニットの第2実施形態について、図4、および図5を参照して説明する。図4は、第2実施形態に係るセンサーユニットの概略構成を示し、図4(a)は平面図、図4(b)は図4(a)のA−A断面図、図4(c)は底面図である。なお、図4(a)では、図を見易くするため、蓋部材としてのキャップを省略した図としている。また、図5は、第2実施形態における台座の概略を示す斜視図である。なお、前述の第1実施形態と同様の構成については同符号を付している。また、同じ構成についての説明は省略することがある。
(Second Embodiment)
Next, 2nd Embodiment of a sensor unit is described with reference to FIG. 4 and FIG. FIG. 4 shows a schematic configuration of a sensor unit according to the second embodiment, FIG. 4 (a) is a plan view, FIG. 4 (b) is a cross-sectional view taken along line AA in FIG. 4 (a), and FIG. Is a bottom view. In FIG. 4A, a cap as a lid member is omitted for easy understanding of the drawing. FIG. 5 is a perspective view showing an outline of a pedestal in the second embodiment. In addition, the same code | symbol is attached | subjected about the structure similar to the above-mentioned 1st Embodiment. In addition, description of the same configuration may be omitted.
図4に示すように、第2実施形態に係るセンサーユニット60は、センサーデバイスとしての第1センサーデバイス23と、第3センサーデバイス33と、第4センサーデバイス43と、第1、第3、第4センサーデバイス23,33,43に接続されたコネクター14とが設けられた基板11と、基板11を載置し且つコネクター14が露出する開口部としての貫通孔13を備えた台座40と、を含む。また、センサーユニット60は、台座40に接続されて基板11を覆う蓋部材としてのキャップ24を備えている。第1センサーデバイス23は、基板11と台座40との間に設けられた間隙である部品収納部19と平面視(図示Z軸方向から見たとき)で重なる位置における基板11の第1面11aに所謂横置きで配置されている。また、第3センサーデバイス33および第4センサーデバイス43は、基板11の切り欠き部11h,11kに所謂縦置きで実装されている。この第1センサーデバイス23、第3センサーデバイス33および第4センサーデバイス43の実装については後述する。なお、本実施形態では、第1センサーデバイス23、第3センサーデバイス33および第4センサーデバイス43として慣性センサーを用いた例で説明する。以下、構成部材について他の構成部材も含め詳細を説明する。
As shown in FIG. 4, the
(基板)
基板11は、表裏に主面が設けられ、一方の主面である第1面11aと、第1面11aと表裏関係にある他方の主面である第2面11bと、第1面11aと第2面11bとを繋ぐ側面を備えている。加えて本例の基板11は、2つの角部に切り欠き部11hと切り欠き部11kとを有している。切り欠き部11hは、基板11の第1面11aの向く方向であるZ軸方向と直交するY軸方向に側面11cを有している。また、切り欠き部11kは、Z軸方向およびY軸方向の双方と直交するX軸方向に側面11dを有している。そして、基板11は、後述する台座40の基板接合部22a,22b,22cと、図中ハッチングで示す接続領域R1の位置で接続されている。基板11は、例えば樹脂やセラミックといった絶縁体から形成される。基板11の第1面11aおよび第2面11bには、例えばめっき成膜で導電材から形成される配線パターン(実装配線や導電端子、電極など)が形成されている。また、切り欠き部11h,11kの縁(第1面の輪郭)に沿った第1面11aには、後述する第3センサーデバイス33および第4センサーデバイス43を実装する導電端子が配置されている。なお、これらの配線パターン(実装配線や導電端子、電極など)は、図示を省略している。
(substrate)
The
台座40に接続されている基板11の部品収納部19と平面視(Z軸方向視)で重なる領域における第1面11aには、第1センサーデバイス23、および第2センサーデバイス18が実装されている。慣性センサーである第1センサーデバイス23は、平たい略直方体の外形を有しており、外面の輪郭は長方形に形成されている。第1センサーデバイス23は、図示しない複数の電極としての外部電極が外面に配置されている。そして、第1センサーデバイス23は、部品収納部19と平面視で重なる領域にあって、外面としての底面が基板11の第1面11aに重ねられるように配置される。そして、第1センサーデバイス23は、外面に設けられている導電端子と基板11に設けられた電極とが電気的接続を取って、基板11に実装される。実装における接続には、例えばはんだ材といった接合材が用いられるが図示では省略している。第1センサーデバイス23は、一軸の検出軸50を有する角速度センサー、すなわちジャイロセンサーから構成される。角速度センサーでは、検出軸50が底面に直交しており、検出軸50回りの角速度が検出される。
The
さらに、基板11の切り欠き部11hには、その側面11cに第3センサーデバイス33が実装されている。第3センサーデバイス33は、図示しない複数の電極としての外部電極が外面(底面)に配置されている。そして、第3センサーデバイス33は、部品収納部19の内の段差部19b(図5参照)と平面視で重なる領域にあって、底面が切り欠き部11hの側面11cに対向し当接された状態で、基板11に実装(固定)されている。第3センサーデバイス33は、その底面(外面)に設けられている電極(図示せず)と、切り欠き部11hの縁に沿って設けられている導電端子(図示せず)とが、例えばはんだ材といった接合材としての導電体38によって電気的接続を取って実装される。第3センサーデバイス33は、一軸の検出軸51を有する角速度センサー、すなわちジャイロセンサーから構成される。角速度センサーでは、検出軸51が底面に直交しており、Y軸方向に沿った検出軸51回りの角速度が検出される。
Further, the
また、第3センサーデバイス33と同様に、第4センサーデバイス43も基板11に実装されている。第4センサーデバイス43は、基板11の切り欠き部11kに配置されている。第4センサーデバイス43は、図示しない複数の電極が外面(底面)に配置されている。そして、第4センサーデバイス43は、部品収納部19の内の段差部19c(図5参照)と平面視で重なる領域にあって、底面が切り欠き部11kの側面11dに対向し当接された状態で、基板11に実装(固定)されている。第4センサーデバイス43は、その底面(外面)に設けられている電極(図示せず)と、切り欠き部11kの縁に沿って設けられている導電端子(図示せず)とが、例えばはんだ材といった接合材としての導電体39によって電気的接続を取って実装される。第4センサーデバイス43は、一軸の検出軸52を有する角速度センサー、すなわちジャイロセンサーから構成される。角速度センサーでは、検出軸52が底面に直交しており、X軸方向に沿った検出軸52回りの角速度が検出される。
Similarly to the
第2センサーデバイス18は、例えば、加速度センサーで構成されている。本例では、一軸(検出軸50)方向の加速度を検出可能なセンサーを例示しており、検出軸50に沿って加速度を検出することができる。なお、第2センサーデバイス18は、多軸方向の加速度を検出可能な、例えば三軸加速度センサーで構成されてもよい。三軸加速度センサーを用いれば、直交三軸に沿って加速度を検出することができる。
The
基板11の主面の内で、第1面11aと表裏関係にある第2面11bには、コネクター14、チップ抵抗やチップコンデンサーといったその他の電子部品15、およびICチップ(集積回路)17などが実装されている。実装における接続には、例えば、はんだ材といった接合材が用いられる。なお、チップ抵抗またはチップコンデンサーをセンサーデバイスからの出力特性の改善に用いてもよい。また、コネクター14、その他の電子部品15、およびICチップ(集積回路)17などは、図示しない配線パターンで相互に電気的に接続される。なお、コネクター14は、その底面(固定面)が基板11の第2面11bと重なるように配置され、基板11の第2面11bに取り付けられている。このように、コネクター14が取り付けられることで、第1センサーデバイス23の検出軸50の方向とコネクター14の挿入方向とを、基板11を介して合わせることが可能となる。
Of the main surface of the
なお、上述では、基板11の第1面11aに、第1センサーデバイス23、および第2センサーデバイス18が実装され、第2面11bに、コネクター14、電子部品15、およびICチップ(集積回路)17などが実装されている例で説明したが、実装する面、および組み合わせを特定するものではない。例えば、第1面11aに、電子部品15、およびICチップ(集積回路)17などが実装され、第2面11bに、コネクター14、第1センサーデバイス23、および第2センサーデバイス18などが実装されている構成であってもよい。
In the above description, the
(台座)
ここで、台座40について、図5も加えて参照しながら詳細を説明する。台座40は、基板11の第2面11bと対向するように設けられている。台座40は、基板11の第2面11bと対向するように設けられた板状の基体25と、基体25の外周に沿って基体25から基板11の第2面11bに向かって突出する、基板接合部22a,22b,22cとが設けられている。台座40は、下面(外底面)20bと、下面20bと表裏関係であって基体25の内底面である上面20aと、基板接合部22a,22b,22cの上面である基板11との接合面22fとを有している。基板接合部22a,22b,22cのそれぞれの接合面22fは、同一面で形成されている。基板接合部22a,22b,22cは、基体25の厚みH1(肉厚:上面20aと下面20bとの厚さ)より大きな厚みH2(肉厚:接合面22fと下面20bとの厚さ)を有している。即ち、基板接合部22a,22b,22cは、基体25の上面20aから突出している。また、本例では、X軸方向の端部にあってY軸方向に延びる基板接合部22aと、Y軸方向の両端部にあってX軸方法に延びる基板接合部22b,22cとで突出部22が形成されている。
(pedestal)
Here, the details of the
また、基板接合部22aが設けられている側と反対側の2つの角部には、上面20aから段差を有し、上面20aの部分よりさらに肉厚の薄い厚みH3を有する段差部19bと段差部19cが設けられている。段差部19bおよび段差部19cには、前述した第3センサーデバイス33および第4センサーデバイス43が配置される。このように段差部19b,19cを設けることで、厚さの異なる領域が部品収納部19に設けられることになり、部品収納部19の剛性を高めることができる。これにより台座40の剛性も高まり、台座40の変形などを起こり難くすることができる。そして、突出している基板接合部22a,22b,22cの内側面と基体25の上面20a、および段差部19bおよび段差部19cの上面20cとで形成される空間領域が部品収納部19となる。
Further, the two corners opposite to the side where the
さらに、台座40の基板接合部22aには、接合面22fから下面20bに貫通する貫通孔13が設けられている。貫通孔13は、後述するように基板11が台座40に接続された際に、基板11に接続されているコネクター14を収納するように設けられている。貫通孔13は、コネクター14の外形よりも一回り大きな形状を有した孔である。本例の貫通孔13は、矩形状の開口を有した孔である。また、台座40には、基体25の外周端部に薄肉状に設けられた鍔部21が設けられている。
Further, the
そして、基板11の外周部およびコネクター14を挿入する貫通孔13の外周部を含む接続領域R1において、基板11が基板接合部22a,22b,22c上に接続されることにより、台座40に基板11が支持される。台座40への基板11の支持については、前述の第1実施形態と同様であるのでここでの説明は省略する。
And in connection area | region R1 containing the outer peripheral part of the board |
上面20aを基準としたときの突出部22の高さは、突出部22に基板11が接続されたとき、コネクター14の入出力面14aが、貫通孔13の内に収まるように設定される。換言すれば、突出部22に基板が接続されたとき、コネクター14の入出力面14aが基体25の下面20b(台座40の下面)より内側(上面20a側)に位置している。このように構成することで、不測の事態が起こってもコネクター14に衝撃や負荷が加わることが防止でき、コネクター14の破損を防止することが可能となる。なお、貫通孔13とコネクター14の外周部との隙間には、充填材16が配設されている。このように充填材16によって隙間が埋められていることにより、台座40の下面(基体25の下面20b)への開口部が塞がれるため、台座40の下面側から基板11と台座20との間に設けられた間隙である部品収納部19への水分、塵などの異物侵入を防止することが可能となる。
The height of the protruding
また、台座40の基板接合部22a,22b,22c上に、基板11を接続したときに、第3センサーデバイス33および第4センサーデバイス43は、段差部19bおよび段差部19cの上面20cとの間に、間隙が設けられるように配置されている。このように、間隙を設けることにより、外部から台座40が受ける衝撃、あるいは変形などの応力が、第3センサーデバイス33および第4センサーデバイス43などのセンサーデバイスに直接伝わることを防止することができ、センサーデバイスの検出精度を高めることが可能となる。
Further, when the
台座40をこのような構成とすることにより、基板11を簡単に支持することができるとともに、基板11と基体25との間に、チップ抵抗やチップコンデンサーといったその他の電子部品15、およびICチップ(集積回路)17などを収容するスペース(部品収納部19)を確保することができる。このようにして基板11を固定すると、基板11と基体25との間に空間が形成され、当該空間内に、電子部品15、およびICチップ(集積回路)17などが収容される。これにより、これら部品と台座40との接触が防止され、センサーユニット10の信頼性が向上する。また、鍔部21には、後述する蓋部材としてのキャップ24が接合されている。キャップ24は、例えばエポキシ樹脂を基材とした樹脂接着剤などを用いることにより、容易に台座40に接合することができる。なお、蓋部材としてのキャップ24は、前述の第1実施形態と同様であるので本実施形態での説明は省略する。
By configuring the
このような台座40の構成材料としては、特に限定されないが、制振特性を有する材料であるのが好ましい。これにより、基板11の不要な振動が抑えられ、第1センサーデバイス23、および第2センサーデバイス18などの検出精度が向上する。このような材料としては、例えば、マグネシウム合金、鉄系合金、銅合金、マンガン合金、Ni−Ti系合金などの各種制振合金が挙げられる。
The constituent material of the
以上説明したセンサーユニット60は、前述の第1実施形態と同様に実装基板に実装することができる。なお、実装構成、およびキャップ24の表面処理などについては、第1実施形態と同様であるため説明を省略する。
The
上述した第1実施形態のセンサーユニット60によれば、前述の第1実施形態と同様な効果を有すると共に、次のような効果も併せて有している。なお、ここでの説明では、第1実施形態と重複する効果の記載は省略し、異なる効果について記載する。
According to the
センサーユニット60は、第3センサーデバイス33を基板11の切り欠き部11hの側面11cに実装し、第4センサーデバイス43を、基板11の切り欠き部11kの側面11dに実装している。このように、センサーデバイスを基板11の側面11c,11dに対向して実装し、第3センサーデバイス33および第4センサーデバイス43の電極と基板11の導電端子とを接合材としての導電体38,39により電気的かつ機械的に確実に固定することにより、既存のセンサーパッケージを用いて小型で低背なセンサーユニットを提供できる。また、センサーユニット60では、台座40に段差部19b,19cが設けられている。このように段差部19b,19cを設けることで、センサーユニットの高さ方向の寸法を小さくすることができる。
In the
(台座の変形例)
台座の変形例について、図6を参照しながら説明する、図6は、台座の変形例を示す斜視図である。図6に示す台座80は、第2実施形態で説明した台座40と基板接合部の構成が異なっている。本説明では、第2実施形態の台座40と異なる構成を説明し、同様な構成については説明を省略する。
(Modification of pedestal)
A modification of the pedestal will be described with reference to FIG. 6. FIG. 6 is a perspective view showing a modification of the pedestal. The
台座80は、第2実施形態の台座40に設けられている基板接合部22a,22b,22cに加えて、基板接合部22dが設けられている。基板接合部22dは、基板接合部22aの設けられている端と反対側の端側に有って、段差部19bと段差部19cとの間に設けられている。基板接合部22dは、他の基板接合部22a,22b,22cと同一平面となる高さの上面を有している。
The
このような台座80によれば、基板11における4方向の外周を接続することができるため、第2実施形態の台座40と比べ更に、接続された基板11のばたつきや撓みが生じ難く、基板11に接続されている第3センサーデバイス33、第4センサーデバイス43、コネクター14の接合の信頼度を高めることができる。また、コネクター14の脱着をよりスムースに、確実に行うことができる。
According to such a
(センサーユニットの適用例)
以上のようなセンサーユニット10,60は、電子機器、移動体、およびその他の機械などに適用することが可能である。以下、センサーユニット10を用いた構成を例示して詳細を説明する。
(Application example of sensor unit)
The
<電子機器>
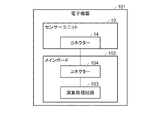
以上のようなセンサーユニット10は、例えば図7に示されるように、電子機器101に組み込まれて利用されることができる。電子機器101では例えばメインボード(実装基板)102に演算処理回路103およびコネクター104が実装される。コネクター104には例えばセンサーユニット10のコネクター14が結合されることができる。演算処理回路103にはセンサーユニット10から検出信号が供給されることができる。演算処理回路103はセンサーユニット10からの検出信号を処理し処理結果を出力する。電子機器101には、例えばモーションセンシングユニットや民生用ゲーム機器、運動解析装置、外科手術ナビゲーションシステム、自動車のナビゲーションシステムなどが例示されることができる。
<Electronic equipment>
The
<移動体>
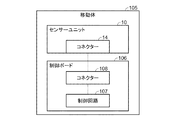
センサーユニット10は、例えば図8に示されるように、移動体105に組み込まれて利用されることができる。移動体105では例えば制御ボード(実装基板)106に制御回路107およびコネクター108が実装される。コネクター108には例えばセンサーユニット10のコネクター14が結合されることができる。制御回路107にはセンサーユニット10から検出信号が供給されることができる。制御回路107はセンサーユニット10からの検出信号を処理し処理結果に応じて移動体105の運動を制御することができる。こういった制御には、移動体の挙動制御、自動車のナビゲーション制御、自動車用エアバッグの起動制御、飛行機や船舶の慣性航法制御、誘導制御などが例示されることができる。
<Moving object>
For example, as shown in FIG. 8, the
<その他の機械>
センサーユニット10は、例えば図9に示されるように、機械109に組み込まれて利用されることができる。機械109では例えば制御ボード(実装基板)111に制御回路112およびコネクター113が実装される。コネクター113には例えばセンサーユニット10のコネクター14が結合されることができる。制御回路112にはセンサーユニット10から検出信号が供給されることができる。制御回路112はセンサーユニット10からの検出信号を処理し処理結果に応じて機械109の動作を制御することができる。こういった制御には、産業用機械の振動制御および動作制御やロボットの運動制御などが例示されることができる。
<Other machines>
For example, as shown in FIG. 9, the
なお、上記のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。したがって、このような変形例はすべて本発明の範囲に含まれる。例えば、明細書または図面において、少なくとも一度、より広義または同義な異なる用語とともに記載された用語は、明細書または図面のいかなる箇所においても、その異なる用語に置き換えられることができる。また、センサーユニット10、基板11、第1センサーデバイス23、および第2センサーデバイス18、電子部品15等の構成および動作も本実施形態で説明したものに限定されず、種々の変形が可能である。
Although the present embodiment has been described in detail as described above, it will be easily understood by those skilled in the art that many modifications can be made without departing from the novel matters and effects of the present invention. Therefore, all such modifications are included in the scope of the present invention. For example, a term described with a different term having a broader meaning or the same meaning at least once in the specification or the drawings can be replaced with the different term in any part of the specification or the drawings. Further, the configurations and operations of the
10,60…センサーユニット、11…基板、11a…基板の第1面、11b…基板の第2面、13…貫通孔、14…コネクター、14a…コネクターの入出力面、15…電子部品、16…充填材、17…ICチップ(集積回路)、18…第2センサーデバイス、19…部品収納部、19b,19c…段差部、20…台座、20a…基体の上面、20b…基体の下面(外底面)、21…鍔部、22…突出部、22a,22b,22c,22d…基板接合部、22f…接合面、23…第1センサーデバイス、24…蓋部材としてのキャップ、25…基体、28…接着剤、30…実装基板、30a…実装基板の上面、31…実装基板側のコネクター、33…第3センサーデバイス、40…台座、43…第4センサーデバイス、50,51,52…検出軸、80…台座、R1…台座接合領域。
DESCRIPTION OF
Claims (10)
前記基板に接続される台座と、を備え、
前記台座は前記基板の厚さ方向からの平面視で、前記センサーデバイスと重なる位置に設けられた部品収納部と、前記コネクターの少なくとも一部が露出する開口部と、前記開口部の少なくとも一部を囲むように、かつ、交差する2方向に延在するように配置された厚肉部と、を有し、
前記厚肉部に前記基板が接合されていることを特徴とするセンサーユニット。 A substrate provided with a sensor device comprising an electrode and a connector electrically connected to the sensor device;
A pedestal connected to the substrate,
The pedestal is a plan view from the thickness direction of the substrate, and the component housing section provided in a position overlapping with the sensor device, an opening at least partially exposed in said connector, at least a portion of said opening And a thick portion disposed so as to extend in two intersecting directions,
The sensor unit, wherein the substrate is bonded to the thick portion .
少なくとも一つの前記センサーデバイスは、前記基板の前記側面と対向し、前記電極と前記導電端子とが導電体により接合されていることを特徴とする請求項1に記載のセンサーユニット。 The substrate includes a first surface and a second surface that are in a front-back relationship with each other, a side surface, and a conductive terminal disposed along an outline of the first surface,
The sensor unit according to claim 1, wherein the at least one sensor device is opposed to the side surface of the substrate, and the electrode and the conductive terminal are joined by a conductor.
前記蓋部材は、前記台座に接続されていることを特徴とする請求項1ないし請求項7のいずれか一項に記載のセンサーユニット。 A lid member covering the substrate;
The sensor unit according to claim 1, wherein the lid member is connected to the pedestal.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013208893A JP6255865B2 (en) | 2013-10-04 | 2013-10-04 | Sensor unit, electronic device, and moving object |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013208893A JP6255865B2 (en) | 2013-10-04 | 2013-10-04 | Sensor unit, electronic device, and moving object |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015072232A JP2015072232A (en) | 2015-04-16 |
| JP2015072232A5 JP2015072232A5 (en) | 2016-10-06 |
| JP6255865B2 true JP6255865B2 (en) | 2018-01-10 |
Family
ID=53014692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013208893A Active JP6255865B2 (en) | 2013-10-04 | 2013-10-04 | Sensor unit, electronic device, and moving object |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6255865B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110645970B (en) | 2014-07-16 | 2022-12-27 | 精工爱普生株式会社 | Sensor unit, electronic apparatus, and moving object |
| JP6597069B2 (en) * | 2015-09-02 | 2019-10-30 | セイコーエプソン株式会社 | Sensor unit, electronic device, and moving object |
| JP6926568B2 (en) | 2017-03-24 | 2021-08-25 | セイコーエプソン株式会社 | Physical quantity sensors, electronics and mobiles |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6462530B1 (en) * | 2001-01-25 | 2002-10-08 | Bei Technologies, Inc. | Redundant rate sensor and method |
| JP2003258454A (en) * | 2002-03-04 | 2003-09-12 | Hitachi Unisia Automotive Ltd | Control unit in box shape |
| JP2004163367A (en) * | 2002-11-15 | 2004-06-10 | Ngk Insulators Ltd | Mounting structure of vibration gyro package |
| US7536909B2 (en) * | 2006-01-20 | 2009-05-26 | Memsic, Inc. | Three-dimensional multi-chips and tri-axial sensors and methods of manufacturing the same |
| JP2007218731A (en) * | 2006-02-16 | 2007-08-30 | Tdk Corp | Impact detector |
| JP2012237664A (en) * | 2011-05-12 | 2012-12-06 | Seiko Epson Corp | Physical quantity sensor and electronic apparatus |
| JP5845672B2 (en) * | 2011-07-13 | 2016-01-20 | セイコーエプソン株式会社 | Sensor devices and electronics |
-
2013
- 2013-10-04 JP JP2013208893A patent/JP6255865B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015072232A (en) | 2015-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2015034755A (en) | Sensor unit, electronic apparatus, and moving body | |
| JP6597069B2 (en) | Sensor unit, electronic device, and moving object | |
| CN102809373B (en) | Module and electronic equipment | |
| US9091543B2 (en) | Angular speed sensor for detecting angular speed | |
| US10107653B2 (en) | Sensor device and electronic apparatus | |
| US9541397B2 (en) | Sensor device, and electronic apparatus | |
| JP5164015B2 (en) | Multi-axis gyro sensor | |
| WO2003001150A1 (en) | Composite sensor for detecting angular velocity and acceleration | |
| US9243909B2 (en) | Module and electronic apparatus | |
| JP6451112B2 (en) | Sensor unit, electronic device, and moving object | |
| JP6255865B2 (en) | Sensor unit, electronic device, and moving object | |
| JP6500423B2 (en) | Sensor unit, electronic device, and moving body | |
| JP6347091B2 (en) | Sensor unit, electronic equipment and moving body | |
| JP2007113919A (en) | Three-axis semiconductor sensor | |
| JP4923937B2 (en) | Sensor device | |
| JP2018136161A (en) | Sensor unit and electronic apparatus | |
| US20230324179A1 (en) | Inertial measurement device | |
| US20240093997A1 (en) | Inertial Measurement Device | |
| JP2018136162A (en) | Sensor unit and electronic apparatus | |
| JP6179580B2 (en) | Sensor devices and electronics | |
| JP6064377B2 (en) | Sensor unit, electronic device and moving body | |
| CN117907627A (en) | Inertial sensor unit | |
| JP2013019826A (en) | Circuit board, sensor module, and electronic apparatus | |
| JP2019066490A (en) | Sensor device and electronic equipment | |
| JP2011044574A (en) | Electronic component |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150114 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160617 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160627 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160820 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170714 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170801 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170928 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20170928 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171120 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6255865 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |