JP6207311B2 - 画像処理装置、その制御方法、および制御プログラム - Google Patents
画像処理装置、その制御方法、および制御プログラム Download PDFInfo
- Publication number
- JP6207311B2 JP6207311B2 JP2013189326A JP2013189326A JP6207311B2 JP 6207311 B2 JP6207311 B2 JP 6207311B2 JP 2013189326 A JP2013189326 A JP 2013189326A JP 2013189326 A JP2013189326 A JP 2013189326A JP 6207311 B2 JP6207311 B2 JP 6207311B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- motion vector
- block
- target
- target block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
- Image Analysis (AREA)
- Studio Devices (AREA)
Description
図1は、本発明の第1の実施形態による画像処理装置を備える撮像装置の一例を示すブロック図である。
続いて、本発明の第2の実施形態による画像処理装置を備えるカメラの一例について説明する。
104 光学系
105 撮像部
106 A/D変換部
107 画像処理部
108 記録媒体
201 信頼性判定部
202 動きベクトル検出部
203 アフィン係数算出部
207 アフィン変換部
Claims (8)
- 第1の画像と第2の画像との間の動きベクトルを求める画像処理装置であって、
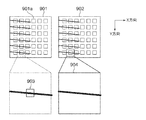
前記第1の画像における第1のターゲットブロックと前記第1のターゲットブロックに対応する前記第2の画像における参照ブロックを比較し、特徴パターンが存在する参照ブロックを判定する判定手段と、
前記判定手段によって前記特徴パターンが存在すると判定された前記参照ブロックを第2のターゲットブロックとし、前記第1の画像において前記第2のターゲットブロックに対応する参照ブロックを設定して、前記第2のターゲットブロックと前記第1の画像における参照ブロックとの相関値を求めて動きベクトルを検出する動きベクトル検出手段と、
を有することを特徴とする画像処理装置。 - 前記判定手段は、前記第1のターゲットブロックと前記第2の画像における参照ブロックとの相関値を表す第1の相関値マップを生成して、当該第1の相関値マップに応じて前記特徴パターンを備える前記参照ブロックが存在する否かを判定することを特徴とする請求項1に記載の画像処理装置。
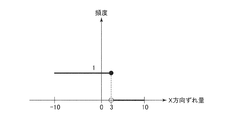
- 前記判定手段は、前記第1の相関値マップが線形状であり、かつ当該線が途切れていると、前記特徴パターンを備える前記参照ブロックが存在すると判定して、前記線の途切れ部分に位置する前記参照ブロックを前記第2のターゲットブロックとして設定することを特徴とする請求項2に記載の画像処理装置。
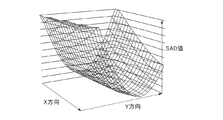
- 前記判定手段は、前記第1の相関値マップが複数の極小値を有し、かつ当該極小値の分布密度が予め定められた閾値よりも低い領域が存在すると、前記特徴パターンを備える前記参照ブロックが存在すると判定して、前記極小値の分布密度が予め定められた閾値よりも低い領域に位置する前記参照ブロックを前記第2のターゲットブロックとして設定することを特徴とする請求項2に記載の画像処理装置。
- 複数の前記第1のターゲットブロックが存在する際、前記動きベクトル検出手段は、前記第1のターゲットブロックの各々について、前記第1のターゲットブロックに対応する第1の動きベクトル又は前記第2のターゲットブロックに対応する第2の動きベクトルを検出して、前記第1の動きベクトル又は前記第2の動きベクトルを検出する際、前記第1の動きベクトルおよび前記第2の動きベクトルの起点を同一の画像に位置づけることを特徴とする請求項1〜請求項4のいずれか1項に記載の画像処理装置。
- 前記動きベクトル検出手段は、前記第2のターゲットブロックと前記第1の画像における参照ブロックとの相関値を求めて当該相関値に基づいて検出した動きベクトルを、前記第1のターゲットブロックに対応する動きベクトルとすることを特徴とする請求項1〜請求項5のいずれか1項に記載の画像処理装置。
- 第1の画像と第2の画像との間の動きベクトルを求める画像処理装置の制御方法であって、
前記第1の画像における第1のターゲットブロックと前記第1のターゲットブロックに対応する前記第2の画像における参照ブロックを比較し、特徴パターンが存在する参照ブロックを判定する判定ステップと、
前記判定ステップで前記特徴パターンが存在すると判定された前記参照ブロックを第2のターゲットブロックとし、前記第1の画像において前記第2のターゲットブロックに対応する参照ブロックを設定して、前記第2のターゲットブロックと前記第1の画像における参照ブロックとの相関値を求めて動きベクトルを検出する動きベクトル検出ステップと、
を有することを特徴とする制御方法。 - 第1の画像と第2の画像との間の動きベクトルを求める画像処理装置で用いられる制御プログラムであって、
前記画像処理装置が備えるコンピュータに、
前記第1の画像における第1のターゲットブロックと前記第1のターゲットブロックに対応する前記第2の画像における参照ブロックを比較し、特徴パターンが存在する参照ブロックを判定する判定ステップと、
前記判定ステップで前記特徴パターンが存在すると判定された前記参照ブロックを第2のターゲットブロックとし、前記第1の画像において前記第2のターゲットブロックに対応する参照ブロックを設定して、前記第2のターゲットブロックと前記第1の画像における参照ブロックとの相関値を求めて動きベクトルを検出する動きベクトル検出ステップと、
を実行させることを特徴とする制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013189326A JP6207311B2 (ja) | 2013-09-12 | 2013-09-12 | 画像処理装置、その制御方法、および制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013189326A JP6207311B2 (ja) | 2013-09-12 | 2013-09-12 | 画像処理装置、その制御方法、および制御プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015056043A JP2015056043A (ja) | 2015-03-23 |
| JP2015056043A5 JP2015056043A5 (ja) | 2016-10-27 |
| JP6207311B2 true JP6207311B2 (ja) | 2017-10-04 |
Family
ID=52820401
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013189326A Expired - Fee Related JP6207311B2 (ja) | 2013-09-12 | 2013-09-12 | 画像処理装置、その制御方法、および制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6207311B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017156705A1 (en) * | 2016-03-15 | 2017-09-21 | Mediatek Inc. | Affine prediction for video coding |
| EP3414900B1 (en) * | 2016-03-15 | 2025-08-06 | HFI Innovation Inc. | Method and apparatus of video coding with affine motion compensation |
| CN116051390B (zh) * | 2022-08-15 | 2024-04-09 | 荣耀终端有限公司 | 运动模糊程度检测方法和设备 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009223722A (ja) * | 2008-03-18 | 2009-10-01 | Sony Corp | 画像信号処理装置、画像信号処理方法、およびプログラム |
| JP5284048B2 (ja) * | 2008-11-12 | 2013-09-11 | キヤノン株式会社 | 画像処理装置、撮像装置及び画像処理方法 |
| JP5803500B2 (ja) * | 2011-09-27 | 2015-11-04 | 株式会社Jvcケンウッド | 動きベクトル検出装置及び方法 |
-
2013
- 2013-09-12 JP JP2013189326A patent/JP6207311B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015056043A (ja) | 2015-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6395506B2 (ja) | 画像処理装置および方法、プログラム、並びに撮像装置 | |
| JP6351238B2 (ja) | 画像処理装置、撮像装置および距離補正方法 | |
| US8289402B2 (en) | Image processing apparatus, image pickup apparatus and image processing method including image stabilization | |
| US9418291B2 (en) | Information processing apparatus, information processing method, and computer-readable storage medium | |
| JP5374119B2 (ja) | 距離情報取得装置、撮像装置、及びプログラム | |
| JP2004234423A (ja) | ステレオ画像処理方法およびステレオ画像処理装置、並びにステレオ画像処理プログラム | |
| US9689668B2 (en) | Image processing apparatus and image processing method | |
| JP5968379B2 (ja) | 画像処理装置およびその制御方法 | |
| JP6395429B2 (ja) | 画像処理装置、その制御方法及び記憶媒体 | |
| JP6207311B2 (ja) | 画像処理装置、その制御方法、および制御プログラム | |
| US8970674B2 (en) | Three-dimensional measurement apparatus, three-dimensional measurement method and storage medium | |
| JP5173549B2 (ja) | 画像処理装置及び撮像装置 | |
| JP6091172B2 (ja) | 特徴点検出装置およびプログラム | |
| JP6074198B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP2016099932A (ja) | 距離検出装置 | |
| US20100027661A1 (en) | Image Processing Method, Image Processing Program, Image Processing Device, and Imaging Device | |
| JP4107273B2 (ja) | 移動体検出装置 | |
| JP2010079815A (ja) | 画像補正装置 | |
| JP6378496B2 (ja) | 画像処理装置、制御方法及び記録媒体 | |
| JP5470529B2 (ja) | 動き検出装置、動き検出方法及び動き検出プログラム | |
| JP2012068842A (ja) | 動きベクトル検出装置、動きベクトル検出方法、および、動きベクトル検出プログラム | |
| JP2011171991A (ja) | 画像処理装置、電子機器、画像処理方法、および、画像処理プログラム | |
| JP2016076838A (ja) | 画像処理装置及び画像処理装置の制御方法 | |
| CN115908373B (zh) | 一种快速响应码的定位图形检测方法和装置 | |
| JP2018072942A (ja) | 画像処理装置、画像処理方法、プログラム、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160909 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160909 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170731 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170905 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6207311 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |