JP6201809B2 - 周辺監視装置及び方法 - Google Patents
周辺監視装置及び方法 Download PDFInfo
- Publication number
- JP6201809B2 JP6201809B2 JP2014034496A JP2014034496A JP6201809B2 JP 6201809 B2 JP6201809 B2 JP 6201809B2 JP 2014034496 A JP2014034496 A JP 2014034496A JP 2014034496 A JP2014034496 A JP 2014034496A JP 6201809 B2 JP6201809 B2 JP 6201809B2
- Authority
- JP
- Japan
- Prior art keywords
- feature points
- vehicle
- specific feature
- turning
- grouped
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Description
前記カメラにより時間的に連続して撮像して得られる各画像から複数の特定特徴点を追跡し、前記追跡した複数の特定特徴点をグルーピングし、車両が旋回中か否かの第1の判定処理を実行し、前記第1の判定処理により車両が旋回中であると判定した場合、左右の検知領域のうちの旋回側の検知領域における、前記グルーピングした複数の特定特徴点のうちの所定数以上の特定特徴点が、車両に向かう方向に向くベクトルを有するか否かの第2の判定処理を実行し、前記第2の判定処理の結果、左右の検知領域のうちの旋回側の検知領域における、前記グルーピングした複数の特定特徴点のうちの所定数以上の特定特徴点が、車両に向かう方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を報知対象の移動物として検出せず、前記第2の判定処理の結果、前記グルーピングした複数の特定特徴点が、複数の方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を前記報知対象の移動物として検出する処理装置とを含む。
12 カメラ
14 電子制御ユニット(ECU)
16 映像認識部
20 モニタ
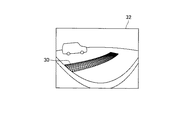
30 周期的構造物
Claims (3)
- 車両周辺を撮像するカメラと、
前記カメラにより時間的に連続して撮像して得られる各画像から複数の特定特徴点を追跡し、前記追跡した複数の特定特徴点をグルーピングし、車両が旋回中か否かの第1の判定処理を実行し、前記第1の判定処理により車両が旋回中であると判定した場合、左右の検知領域のうちの旋回側の検知領域における、前記グルーピングした複数の特定特徴点のうちの所定数以上の特定特徴点が、車両に向かう方向に向くベクトルを有するか否かの第2の判定処理を実行し、前記第2の判定処理の結果、左右の検知領域のうちの旋回側の検知領域における、前記グルーピングした複数の特定特徴点のうちの所定数以上の特定特徴点が、車両に向かう方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を報知対象の移動物として検出せず、前記第2の判定処理の結果、前記グルーピングした複数の特定特徴点が、複数の方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を前記報知対象の移動物として検出する処理装置とを含む、周辺監視装置。 - 前記処理装置は、前記グルーピングした複数の特定特徴点の全てが、車両の旋回中に、車両に向かう方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を前記報知対象の移動物として検出しない、請求項1に記載の周辺監視装置。
- 車両周辺を撮像するカメラにより時間的に連続して撮像して得られる各画像から複数の特定特徴点を追跡し、
前記追跡した複数の特定特徴点をグルーピングし、
車両が旋回中か否かの第1の判定処理を実行し、
前記第1の判定処理により車両が旋回中であると判定した場合、左右の検知領域のうちの旋回側の検知領域における、前記グルーピングした複数の特定特徴点のうちの所定数以上の特定特徴点が、車両に向かう方向に向くベクトルを有するか否かの第2の判定処理を実行し、
前記第2の判定処理の結果、左右の検知領域のうちの旋回側の検知領域における、前記グルーピングした複数の特定特徴点のうちの所定数以上の特定特徴点が、車両に向かう方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を報知対象の移動物として検出せず、
前記第2の判定処理の結果、前記グルーピングした複数の特定特徴点が、複数の方向に向くベクトルを有する場合は、前記グルーピングした複数の特定特徴点に係る物体を前記報知対象の移動物として検出することを含む、周辺監視方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034496A JP6201809B2 (ja) | 2014-02-25 | 2014-02-25 | 周辺監視装置及び方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034496A JP6201809B2 (ja) | 2014-02-25 | 2014-02-25 | 周辺監視装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015158874A JP2015158874A (ja) | 2015-09-03 |
| JP6201809B2 true JP6201809B2 (ja) | 2017-09-27 |
Family
ID=54182796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014034496A Active JP6201809B2 (ja) | 2014-02-25 | 2014-02-25 | 周辺監視装置及び方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6201809B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6618766B2 (ja) * | 2015-10-27 | 2019-12-11 | 株式会社デンソーテン | 画像処理装置および画像処理方法 |
| KR102212268B1 (ko) * | 2019-05-15 | 2021-02-04 | 주식회사 폴라리스쓰리디 | 위치 측정 시스템과 이를 구비하는 이동 수단 및 이를 수행하기 위한 컴퓨팅 장치 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3239521B2 (ja) * | 1993-03-30 | 2001-12-17 | トヨタ自動車株式会社 | 移動体認識装置 |
| JP4193740B2 (ja) * | 2004-03-26 | 2008-12-10 | 三菱自動車工業株式会社 | ノーズビューモニタ装置 |
| JP5866238B2 (ja) * | 2012-03-27 | 2016-02-17 | 富士重工業株式会社 | 車外環境認識装置および車外環境認識方法 |
-
2014
- 2014-02-25 JP JP2014034496A patent/JP6201809B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015158874A (ja) | 2015-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10796171B2 (en) | Object recognition apparatus, object recognition method, and object recognition program | |
| JP5012718B2 (ja) | 画像処理装置 | |
| US9789820B2 (en) | Object detection apparatus | |
| EP3026885B1 (en) | Dirty lens detection device and dirty lens detection method | |
| JP4876118B2 (ja) | 立体物出現検知装置 | |
| US20130286205A1 (en) | Approaching object detection device and method for detecting approaching objects | |
| CN108162858B (zh) | 车载监控装置及其方法 | |
| JP4528283B2 (ja) | 車両周辺監視装置 | |
| CN107004250B (zh) | 图像生成装置及图像生成方法 | |
| KR101427032B1 (ko) | 차량의 보행자 인식 장치 및 방법, 이를 이용한 차량의 보행자 충돌 경고 및 예방 장치 및 방법 | |
| JP2011070593A (ja) | 車両周辺監視装置 | |
| JP4644273B2 (ja) | 車両周辺監視装置 | |
| JP2016192177A (ja) | 車両検出システム、車両検出装置、車両検出方法、及び車両検出プログラム | |
| JP4826355B2 (ja) | 車両周囲表示装置 | |
| JP5491242B2 (ja) | 車両周辺監視装置 | |
| JP2012252501A (ja) | 走行路認識装置及び走行路認識用プログラム | |
| JP6201809B2 (ja) | 周辺監視装置及び方法 | |
| JP4798576B2 (ja) | 付着物検出装置 | |
| JP2017215743A (ja) | 画像処理装置、外界認識装置 | |
| KR101729030B1 (ko) | 차량 주변의 위험요소 경고장치 및 경고방법 | |
| JP4321410B2 (ja) | 物体検出装置、および方法 | |
| JP5541099B2 (ja) | 道路区画線認識装置 | |
| JP2012256159A (ja) | 接近物検知装置および接近物検知方法 | |
| JP6949090B2 (ja) | 障害物検知装置及び障害物検知方法 | |
| JP6584862B2 (ja) | 物体検出装置、物体検出システム、物体検出方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170801 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170814 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6201809 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |