JP6198590B2 - 画像処理装置、撮像装置および画像処理方法 - Google Patents
画像処理装置、撮像装置および画像処理方法 Download PDFInfo
- Publication number
- JP6198590B2 JP6198590B2 JP2013246014A JP2013246014A JP6198590B2 JP 6198590 B2 JP6198590 B2 JP 6198590B2 JP 2013246014 A JP2013246014 A JP 2013246014A JP 2013246014 A JP2013246014 A JP 2013246014A JP 6198590 B2 JP6198590 B2 JP 6198590B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- distance
- blur
- value
- processing apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 82
- 238000012545 processing Methods 0.000 title claims description 39
- 238000003672 processing method Methods 0.000 title claims description 5
- 210000001747 pupil Anatomy 0.000 claims description 58
- 238000006243 chemical reaction Methods 0.000 claims description 33
- 230000003287 optical effect Effects 0.000 claims description 32
- 230000004304 visual acuity Effects 0.000 claims description 28
- 238000004364 calculation method Methods 0.000 claims description 27
- 238000000034 method Methods 0.000 claims description 18
- 238000002834 transmittance Methods 0.000 claims description 11
- 238000003702 image correction Methods 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 7
- 230000008569 process Effects 0.000 claims description 7
- 230000006870 function Effects 0.000 description 13
- 230000004907 flux Effects 0.000 description 9
- 230000005484 gravity Effects 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 4
- ORQBXQOJMQIAOY-UHFFFAOYSA-N nobelium Chemical compound [No] ORQBXQOJMQIAOY-UHFFFAOYSA-N 0.000 description 4
- 230000004075 alteration Effects 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 102220471758 Proteasome subunit alpha type-7_S24A_mutation Human genes 0.000 description 1
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003709 image segmentation Methods 0.000 description 1
- 238000005468 ion implantation Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000010454 slate Substances 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0075—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for altering, e.g. increasing, the depth of field or depth of focus
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/70—Denoising; Smoothing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/95—Computational photography systems, e.g. light-field imaging systems
- H04N23/958—Computational photography systems, e.g. light-field imaging systems for extended depth of field imaging
- H04N23/959—Computational photography systems, e.g. light-field imaging systems for extended depth of field imaging by adjusting depth of field during image capture, e.g. maximising or setting range based on scene characteristics
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/34—Systems for automatic generation of focusing signals using different areas in a pupil plane
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2200/00—Indexing scheme for image data processing or generation, in general
- G06T2200/21—Indexing scheme for image data processing or generation, in general involving computational photography
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Optics & Photonics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Studio Devices (AREA)
- Image Processing (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Description
結像光学系の第1の瞳領域からの光束に基づく第1の画像と、前記結像光学系の第2の瞳領域からの光束に基づく第2の画像とに基づいて距離情報を算出する距離演算手段と、
前記第1の画像および前記第2の画像に基づく元画像に対して、前記距離演算手段によって算出した距離情報を用いてボケを付加しフォーカス面を所定のリフォーカス距離だけ移動させるボケ付加手段と、
を備える画像処理装置であって、
前記ボケ付加手段は、前記リフォーカス距離が閾値以下の場合は、第1の元画像に対してボケを付加し、前記リフォーカス距離が閾値より大きい場合は、前記第1の元画像よりも実効的なF値が大きい画像である第2の元画像に対してボケを付加する、
ことを特徴とする画像処理装置である。
画像処理装置における画像処理方法であって、
結像光学系の第1の瞳領域からの光束に基づく第1の画像と、前記結像光学系の第2の瞳領域からの光束に基づく第2の画像とに基づいて距離情報を算出する距離演算ステップと、
前記第1の画像および前記第2の画像に基づく元画像に対して、前記距離演算ステップにおいて算出した距離情報を用いてボケを付加しフォーカス面を所定のリフォーカス距離だけ移動させるボケ付加ステップと、
を含み、
前記ボケ付加ステップでは、前記リフォーカス距離が閾値以下の場合は、第1の元画像に対してボケを付加し、前記リフォーカス距離が閾値より大きい場合は、前記第1の元画像よりも実効的なF値が大きい画像である第2の元画像に対してボケを付加する、
ことを特徴とする画像処理方法である。
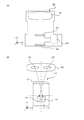
実施形態1は、距離演算機能とボケ付加機能を有する画像処理装置が組み込まれた撮像装置である。本実施形態にかかる撮像装置は、撮影された画像から距離を演算し、求められた距離に基づいてボケを付加して、フォーカス面を所定のリフォーカス距離だけ移動させる機能を有する。
固体撮像素子102は、図1(B)に示す測距画素110を複数備えている。測距画素110は、光束分離用のマイクロレンズ111と、基板112を有している。マイクロレンズ111は、検出する波長帯域で透明な材料であるSiO2などで形成されており、基板112は、検出する波長帯域で吸収を有するSiなどの材料で形成されている。また、基板112内には、イオン打ち込みなどによって形成された二つの光電変換部113、114が形成されている。光電変換部で発生した電荷は、図示しない配線によって演算部103(画像処理装置)に転送される。
図2は、撮像装置100における、リフォーカス面の移動を伴うボケ付加を行う際の演算フローを示したものである。
(C))。即ち、従来の手法を用いた場合に設定できるリフォーカス距離より、本実施形態の手法を用いた場合に設定できるリフォーカス距離のほうが大きくなり、リフォーカスの自由度が向上する。
なお、リフォーカス距離がA+B像の深度より大きい場合、αとβの比は1以外であれば、リフォーカスの設定可能範囲を広げることができる。例えば、図4(A)のように、リフォーカス面がピント面よりも近い場合と遠い場合でαとβの比が等しくてもよいし、図4(B)のように、リフォーカス面が近い場合と遠い場合でαとβの大小関係を変えても良い。特に、αとβの比が0または無限大、即ち、A像(第1の画像)またはB像(第2の画像)そのものを元画像として使用すれば、リフォーカスの自由度が更に向上するために好ましい。なぜならば、A像(またはB像)は、瞳領域123(または瞳124)からの光束のみを受光するため、αとβの比が0や無限大ではない場合より、元画像のF値が大きくなるためである。
図2に示す演算フローでは、リフォーカス距離がA+B像の深度以下の場合は元画像(第1の元画像)としてA+B像を使用していた。即ち、リフォーカス距離がA+B像の深度以下の場合は、A像とB像とを均等に足し合わせた画像を元画像としているが、その他の比で足し合わせた画像を元画像としても良い。ただし、A像とB像を均等に足し合わせる方が、その他の比率で足し合わせるよりも演算量が少ないため好ましい。
また、図2に示す演算フローでは、A+B像の深度を閾値として、リフォーカス距離とこの閾値の大小関係によって使用する元画像を切り替えている。しかし、リフォーカス距離がA+B像の深度より大きい場合にαA+βB像(第2の元画像)を用いるようにできれば、閾値はA+B像の深度以外であっても良い。具体的には、閾値をA+B像の深度よりも小さい値とすることができる。この閾値(第1の距離)としては、第1および第2の元画像の解像力が等しくなる距離(領域140と141の境界)にすることが好ましい。即ち、リフォーカス距離が閾値以下の場合に使用する元画像であるA+B像と、閾値より大きい場合に使用する元画像であるαA+βB像の解像力が等しくなる距離(第1の距離)を、閾値とすることが好ましい。このようにすることで、リフォーカス面近傍で高い解像力を有する画像を生成することができる(図5(A))。第1の距離は、結像光学系101の設計値(ズーム、フォーカス、収差)と、固体撮像素子102の瞳分割特性を元に決定すればよい。
更に、設定したリフォーカス距離に応じて、使用する元画像を3通り以上に切り替えても良い。この時、図4(C)のように、設定したリフォーカス距離が大きいほどβ/αの対数の絶対値が0から遠くなるようにすると、リフォーカス面近傍で高い解像力を有する画像を生成することができるため、好ましい。なぜならば、β/αの対数の絶対値が0から遠くなるようにするほど、αA+βB像は、リフォーカス距離が大きい場合に高い解像力を有するためである(図5(B))。
ステップS14Bにて元画像として使用する画像は、ステップS12で求められた距離
情報を使用して、αA+βB像をシフトした画像であることが好ましい。図6のように、A像133、B像134は、ピント面からの距離によって画像の重心位置がシフトするため、距離によって画像の重心位置をシフトしたほうが、より自然なリフォーカス画像が得られるためである。具体的には、ステップS12で求めたA像およびB像をAB像間の像ズレ量の半分だけ像ズレ方向と反対側にシフトし、シフト後の各像を各々α倍、β倍してから加算してαA+βB像を生成する。このようにすれば、ピント面からの距離によらずに画像の重心位置が一定となる。
更に、ステップS14Bにて元画像として使用する画像は、対応する瞳領域123または124の透過率分布に基づいて、αA+βB像に像修正処理を施した画像であることが好ましい。図6のように、A像133、B像134は、瞳領域123、124の透過率分布を反映して非対称なボケを有する画像となるため、ボケの形状を対称な形に修正したほうが、より自然なリフォーカス画像が得られるためである。例えば、像修正処理は、A像およびB像に、対応する瞳領域123、124の透過率を反映した、結像光学系101の点像分布関数の逆関数を畳み込み積分する処理である。像修正後のA像およびB像を、各々α倍、β倍してから加算してボケ付加処理の元画像となるαA+βB像を生成すればよい。
本実施形態における撮像装置において、固体撮像素子102の一部の画素に測距画素110を配置し、他の画素には画像取得用の画素を配置してもよい。一部の画素110で測距を行い、残りの画素で被写体の画像を取得することができる。但し、測距画素110が全面に設けられていたほうが、ステップS14における元画像の解像度が向上するため好ましい。
本発明の実施形態2に係る撮像装置における、リフォーカス面の移動を伴うボケ付加を行う際の演算フローを図8に示した。本実施形態における演算フローは、実施形態1における演算フロー(図2)に対し、リフォーカス面の移動を伴うボケ付加を行うステップS24のみが異なる。本実施形態における演算フローでは、ステップS24において、リフ
ォーカス距離に応じて、使用する元画像をA像とB像の間で切り替えている。
図10に、A像とB像の実効的なF値を制御する手法を示した。図10(A)、(B)では、固体撮像素子102中の測距画素110において、A像を取得する光電変換部213の開口率を、B像を取得する光電変換部214の開口率よりも大きくしている。光電変換部213は、光電変換部214よりもより広い瞳領域からの光を検出するため、B像の実効的なF値をA像よりも大きくすることができる。開口率を制御するには、図10(A)のように光電変換部の面内方向の大きさを変えてもよいし、図10(B)のように光電変換部の上部に遮光膜115を設け、入射する光束を制限しても良い。
実施形態3における撮像装置は、固体撮像素子102内の測距画素110の画素位置によって、用いる元画像を変える。即ち、リフォーカス距離が閾値以下の場合は、画素位置
ごとに、実効的なF値が小さい方の画素値からなる画像を元画像として用い、閾値よりも大きい場合は、実効的なF値が大きい方の画素値からなる画像を元画像として用いる。
前述したように、画像の解像力はF値によって決定されるため、固体撮像素子中の測距画素の位置によってF値が変化している場合、被写体の像面上での位置によって、元画像として用いる画像を切り替えたほうが好ましい。また、
リフォーカス距離によっても、使用する元画像を切り替えれば、更に好ましい。
上記の実施形態の説明は、本発明を例示的に説明するものであり、本発明を限定する趣旨のものではない。上記の実施形態の個々の構成要素は可能な限り組み合わせて実装することができる。
コンピュータなどに好ましく適用できる。また、このような撮像装置或いは画像処理装置を内蔵する各種の電子機器(携帯電話、スマートフォン、スレート型端末、パーソナルコンピュータを含む)にも本発明の技術を適用可能である。
101:結像光学系
102:固体撮像素子
103:演算部
Claims (21)
- 結像光学系の第1の瞳領域からの光束に基づく第1の画像と、前記結像光学系の第2の瞳領域からの光束に基づく第2の画像とに基づいて距離情報を算出する距離演算手段と、
前記第1の画像および前記第2の画像に基づく元画像に対して、前記距離演算手段によって算出した距離情報を用いてボケを付加しフォーカス面を所定のリフォーカス距離だけ移動させるボケ付加手段と、
を備える画像処理装置であって、
前記ボケ付加手段は、前記リフォーカス距離が閾値以下の場合は、第1の元画像に対してボケを付加し、前記リフォーカス距離が閾値より大きい場合は、前記第1の元画像よりも実効的なF値が大きい画像である第2の元画像に対してボケを付加する、
ことを特徴とする画像処理装置。 - 前記第1の画像と前記第2の画像は実効的なF値が同一の画像であり、
前記第1の元画像は、前記第1の画像と前記第2の画像を第1の比で足し合わせた画像であり、
前記第2の元画像は、前記第1の画像と前記第2の画像を対数の絶対値が前記第1の比の対数の絶対値よりも大きい第2の比で足し合わせた画像、前記第1の画像、および前記第2の画像のいずれかである、
請求項1に記載の画像処理装置。 - 前記第1の元画像は、前記第1の画像と前記第2の画像を均等に足し合わせた画像である、
請求項2に記載の画像処理装置。 - 前記第2の元画像は、前記第1の画像または前記第2の画像である、
請求項3に記載の画像処理装置。 - 前記閾値は、前記第1の画像と前記第2の画像を均等に足し合わせた画像の深度である、
請求項3または4に記載の画像処理装置。 - 前記閾値は、前記第1の元画像と前記第2の元画像の解像力が等しくなるリフォーカス距離である、
請求項3または4に記載の画像処理装置。 - 前記ボケ付加手段は、前記距離演算手段によって求められた距離に応じて前記第1の画像および前記第2の画像の重心位置をシフトさせ、シフト後の第1の画像および第2の画像に基づいて前記第2の元画像を生成する、
請求項3から6のいずれか1項に記載の画像処理装置。 - 前記ボケ付加手段は、前記第1の瞳領域の透過率分布を用いて前記第1の画像に像修正処理を施し、前記第2の瞳領域の透過率分布を用いて前記第2の画像に像修正処理を施し、像修正後の第1の画像および第2の画像に基づいて前記第2の元画像を生成する、
請求項3から7のいずれか1項に記載の画像処理装置。 - 前記第1の画像と前記第2の画像は実効的なF値が異なる画像であり、
前記第1の元画像は、前記第1の画像および前記第2の画像のうち実効的なF値が小さい方の画像であり、
前記第2の元画像は、前記第1の画像および前記第2の画像のうち実効的なF値が大きい方の画像である、
請求項1に記載の画像処理装置。 - 前記閾値は、前記第1の画像と前記第2の画像の解像力が等しくなるリフォーカス距離である、
請求項9に記載の画像処理装置。 - 前記リフォーカス距離に応じて、前記第1の画像の実効的なF値と前記第2の画像の実効的なF値の少なくともいずれかを制御する制御手段を更に有する、
請求項9または10に記載の画像処理装置。 - 前記第1の画像と前記第2の画像はともに画素位置に応じて実効的なF値が異なる画像であり、
前記第1の元画像は、画素位置ごとに、前記第1の画像および前記第2の画像のうちの実効的なF値が小さい方の画素値からなる画像であり、
前記第2の元画像は、画素位置ごとに、前記第1の画像および前記第2の画像のうちの実効的なF値が大きい方の画素値からなる画像である、
請求項1に記載の画像処理装置。 - 結像光学系と、
前記結像光学系の射出瞳を透過した光束に基づく信号を取得する撮像手段と、
請求項1から12のいずれか1項に記載の画像処理装置と、
を備える撮像装置。 - 前記撮像手段は、複数の測距画素を含む固体撮像素子を含み、
前記測距画素には、前記結像光学系の第1の瞳領域からの光束を受光し第1の像を取得する第1の光電変換部と、前記結像光学系の第2の瞳領域からの光束を受光し第2の像を取得する第2の光電変換部とを含む、
請求項13に記載の撮像装置。 - 前記測距画素は、該測距画素への入射光の入射方向に応じて分離する光束分離手段を含む、
請求項14に記載の撮像装置。 - 前記光束分離手段は、マイクロレンズである、
請求項15に記載の撮像装置。 - 前記光束分離手段は、導波路である、
請求項15に記載の撮像装置。 - 前記測距画素において、前記第1の光電変換部の開口率と前記第2の光電変換部の開口率が異なる、
請求項14から17のいずれか1項に記載の撮像装置。 - 前記測距画素は、前記第1の光電変換部の開口率および前記第2の光電変換部の開口率の少なくともいずれかを制御する開口率制御手段を更に含む、
請求項18に記載の撮像装置。 - 画像処理装置における画像処理方法であって、
結像光学系の第1の瞳領域からの光束に基づく第1の画像と、前記結像光学系の第2の瞳領域からの光束に基づく第2の画像とに基づいて距離情報を算出する距離演算ステップと、
前記第1の画像および前記第2の画像に基づく元画像に対して、前記距離演算ステップにおいて算出した距離情報を用いてボケを付加しフォーカス面を所定のリフォーカス距離だけ移動させるボケ付加ステップと、
を含み、
前記ボケ付加ステップでは、前記リフォーカス距離が閾値以下の場合は、第1の元画像に対してボケを付加し、前記リフォーカス距離が閾値より大きい場合は、前記第1の元画像よりも実効的なF値が大きい画像である第2の元画像に対してボケを付加する、
ことを特徴とする画像処理方法。 - 請求項20に記載の方法の各ステップをコンピュータに実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013246014A JP6198590B2 (ja) | 2013-11-28 | 2013-11-28 | 画像処理装置、撮像装置および画像処理方法 |
| US14/538,156 US10043275B2 (en) | 2013-11-28 | 2014-11-11 | Image processing apparatus, imaging apparatus, and image processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013246014A JP6198590B2 (ja) | 2013-11-28 | 2013-11-28 | 画像処理装置、撮像装置および画像処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015104113A JP2015104113A (ja) | 2015-06-04 |
| JP2015104113A5 JP2015104113A5 (ja) | 2016-12-28 |
| JP6198590B2 true JP6198590B2 (ja) | 2017-09-20 |
Family
ID=53182328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013246014A Active JP6198590B2 (ja) | 2013-11-28 | 2013-11-28 | 画像処理装置、撮像装置および画像処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10043275B2 (ja) |
| JP (1) | JP6198590B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6317635B2 (ja) * | 2014-06-30 | 2018-04-25 | 株式会社東芝 | 画像処理装置、画像処理方法及び画像処理プログラム |
| JP2016133595A (ja) * | 2015-01-19 | 2016-07-25 | キヤノン株式会社 | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 |
| JP6671915B2 (ja) * | 2015-10-14 | 2020-03-25 | キヤノン株式会社 | 処理装置、処理システム、撮像装置、処理方法、プログラム、および記録媒体 |
| JP6789810B2 (ja) * | 2016-12-28 | 2020-11-25 | キヤノン株式会社 | 画像処理方法、画像処理装置、および、撮像装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5066851B2 (ja) * | 2006-07-05 | 2012-11-07 | 株式会社ニコン | 撮像装置 |
| JP2013232757A (ja) * | 2012-04-27 | 2013-11-14 | Nikon Corp | 撮像装置、画像処理装置、画像処理方法及びプログラム |
| US9185387B2 (en) * | 2012-07-03 | 2015-11-10 | Gopro, Inc. | Image blur based on 3D depth information |
-
2013
- 2013-11-28 JP JP2013246014A patent/JP6198590B2/ja active Active
-
2014
- 2014-11-11 US US14/538,156 patent/US10043275B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015104113A (ja) | 2015-06-04 |
| US20150145988A1 (en) | 2015-05-28 |
| US10043275B2 (en) | 2018-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10460460B2 (en) | Method and system for generating depth information | |
| JP4673202B2 (ja) | 画像入力装置 | |
| KR101233013B1 (ko) | 화상 촬영 장치 및 그 거리 연산 방법과 합초 화상 취득 방법 | |
| JP5869883B2 (ja) | 画像処理装置 | |
| JP5832424B2 (ja) | 撮像装置及び距離計測方法 | |
| EP2533198B1 (en) | Imaging device and method, and image processing method for imaging device | |
| US9535193B2 (en) | Image processing apparatus, image processing method, and storage medium | |
| JP6053347B2 (ja) | 撮像装置およびその制御方法ならびにプログラム | |
| JP2011118235A (ja) | 撮像装置 | |
| US20180241949A1 (en) | Image pickup apparatus, control method for image pickup apparatus | |
| US9473693B2 (en) | Photographic apparatus, camera system and methods for calculating focus control information based on a distance between centers of gravity distributions of light receiving sensitivities | |
| JP6198590B2 (ja) | 画像処理装置、撮像装置および画像処理方法 | |
| US20160309142A1 (en) | Image output apparatus, control method, image pickup apparatus, and storage medium | |
| JP2022000695A (ja) | 撮像装置 | |
| US20160275657A1 (en) | Imaging apparatus, image processing apparatus and method of processing image | |
| JP2015073072A (ja) | 固体撮像素子およびそれを用いた撮像装置 | |
| US20160014397A1 (en) | Image capturing apparatus and control method for the same | |
| US20140354777A1 (en) | Apparatus and method for obtaining spatial information using active array lens | |
| CN106303208B (zh) | 图像采集控制方法和装置 | |
| US11889186B2 (en) | Focus detection device, focus detection method, and image capture apparatus | |
| KR20170015170A (ko) | 촬상장치 및 그 제어방법 | |
| JP6642998B2 (ja) | 像ズレ量算出装置、撮像装置、および像ズレ量算出方法 | |
| JP2009258451A (ja) | 焦点検出装置 | |
| KR20140140495A (ko) | 능동형 배열 렌즈를 이용한 공간정보 획득장치 및 방법 | |
| JP2016090975A (ja) | 距離検出装置、撮像装置、距離検出方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170725 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170822 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6198590 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |