JP6154615B2 - 操作システム - Google Patents
操作システム Download PDFInfo
- Publication number
- JP6154615B2 JP6154615B2 JP2013012874A JP2013012874A JP6154615B2 JP 6154615 B2 JP6154615 B2 JP 6154615B2 JP 2013012874 A JP2013012874 A JP 2013012874A JP 2013012874 A JP2013012874 A JP 2013012874A JP 6154615 B2 JP6154615 B2 JP 6154615B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- main body
- drive mechanism
- probe
- operator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 54
- 239000000523 sample Substances 0.000 claims description 44
- 238000001514 detection method Methods 0.000 claims description 40
- 230000002093 peripheral effect Effects 0.000 claims description 17
- 230000008278 dynamic mechanism Effects 0.000 claims 1
- 238000000034 method Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 2
- 238000007429 general method Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
Images




Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
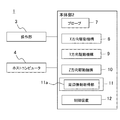
先ず、本実施の形態の操作システムの基本構成を説明する。図1は、本実施の形態の操作システム1を概略的に示す斜視図である。図2は、本実施の形態の操作システム1の制御系ブロック図である。
図5は、本実施の形態の操作システム21の制御系ブロック図である。なお、以下の説明において、重複する説明は省略し、同一の要素には同一の符号を用いて説明する。
図6は、本実施の形態の操作システム31の制御系ブロック図である。なお、以下の説明において、重複する説明は省略し、同一の要素には同一の符号を用いて説明する。
2 本体部
3 操作部
4 ホストコンピュータ
5 基台
6 門型フレーム
7 プローブ
8 X方向駆動機構
9 Y方向駆動機構
10 Z方向駆動機構
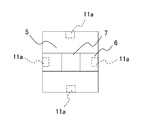
11 検出部、11a 周辺情報取得部
12 制御装置
13、14 操作レバー
21 操作システム
22 検出部、22a 位置情報取得部
23 操作部
31 操作システム
32 検出部、32a 出射部、32b 受信部
33 操作部
34 本体部
Claims (1)
- プローブと、前記プローブと被測定物とを相対的に移動させる駆動機構と、を備える三次元測定機と、
前記駆動機構を遠隔操作するために操作者が操作する操作部と、
前記三次元測定機に対する前記操作部の位置を検出する検出部と、
前記検出部の検出結果に基づいて、前記プローブの移動方向と操作者が前記操作部を操作する方向とを一致させる制御部と、
を備え、
前記検出部は、前記三次元測定機の周辺情報を取得する画像センサを備える操作システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013012874A JP6154615B2 (ja) | 2013-01-28 | 2013-01-28 | 操作システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013012874A JP6154615B2 (ja) | 2013-01-28 | 2013-01-28 | 操作システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014145604A JP2014145604A (ja) | 2014-08-14 |
| JP6154615B2 true JP6154615B2 (ja) | 2017-06-28 |
Family
ID=51425972
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013012874A Active JP6154615B2 (ja) | 2013-01-28 | 2013-01-28 | 操作システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6154615B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104898699B (zh) | 2015-05-28 | 2020-03-17 | 小米科技有限责任公司 | 飞行控制方法及装置、电子设备 |
| JP7087475B2 (ja) | 2018-03-09 | 2022-06-21 | 株式会社タダノ | 遠隔操作端末および遠隔操作端末を備える移動式クレーン |
| JP7167464B2 (ja) * | 2018-03-28 | 2022-11-09 | 株式会社タダノ | 遠隔操作端末および遠隔操作端末を備える作業車両 |
| JP7167469B2 (ja) * | 2018-03-30 | 2022-11-09 | 株式会社タダノ | 遠隔操作端末および遠隔操作端末を備える作業車両 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5931008U (ja) * | 1982-08-23 | 1984-02-27 | 株式会社ミツトヨ | 座標測定機の遠隔操作装置 |
| JP4458284B2 (ja) * | 2005-10-31 | 2010-04-28 | 株式会社エクォス・リサーチ | 遠隔操作装置 |
| JP4822116B2 (ja) * | 2006-03-29 | 2011-11-24 | 株式会社エクォス・リサーチ | 車両及び遠隔操作装置 |
| US8352212B2 (en) * | 2009-11-18 | 2013-01-08 | Hexagon Metrology, Inc. | Manipulable aid for dimensional metrology |
| JP5498139B2 (ja) * | 2009-12-02 | 2014-05-21 | 株式会社島精機製作所 | 裁断機 |
-
2013
- 2013-01-28 JP JP2013012874A patent/JP6154615B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014145604A (ja) | 2014-08-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2014235971B2 (en) | Noncontact measuring device | |
| US10940573B2 (en) | Hand-held tool system | |
| US10773938B2 (en) | Forklift system and control method thereof | |
| JP5885549B2 (ja) | 締付工具、締付位置管理システムおよび締付位置特定方法 | |
| US8169604B2 (en) | Parameter detection system | |
| JP6154615B2 (ja) | 操作システム | |
| US9086271B2 (en) | Industrial robot system having sensor assembly | |
| JP6013139B2 (ja) | 工具長測定方法および工作機械 | |
| US9618649B2 (en) | Detecting an overall dimension of a plate-shaped workpiece by a non-contact sensor | |
| WO2005116809A3 (en) | System and method for operating in virtual 3d space and system for selecting an operation via a visualizing system | |
| JP2019120694A (ja) | 位置測定デバイス、寸法計測測定システムの動作方法及び位置測定デバイスの動作方法 | |
| JP2011048467A (ja) | 加工システム | |
| JP2013025478A (ja) | 作業検知システム | |
| JP2014087883A (ja) | 工具長測定方法および工作機械 | |
| CN102103421A (zh) | 操作输入装置和方法、程序和电子设备 | |
| EP3935412B1 (en) | Electronic apparatus and control method thereof | |
| US12330316B2 (en) | Coordinate-system setting system and coordinate-system setting method | |
| EP3434411B1 (en) | Programmable device provided in a production environment for assisting an operator | |
| WO2022075303A1 (ja) | ロボットシステム | |
| JP6427332B2 (ja) | 画像測定機 | |
| JP5516974B2 (ja) | 視覚センサのマウント装置と方法 | |
| JP2019174177A (ja) | 移動量検出装置 | |
| KR20140008658A (ko) | 용접점 자동 인식 시스템 및 인식 방법 | |
| JP2012168107A (ja) | 位置検出装置 | |
| KR101799280B1 (ko) | 고정밀 3차원 측정시스템 및 이를 이용한 측정방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161014 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170516 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170602 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6154615 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |