JP6131822B2 - 情報処理装置、情報処理方法及びプログラム - Google Patents
情報処理装置、情報処理方法及びプログラム Download PDFInfo
- Publication number
- JP6131822B2 JP6131822B2 JP2013219661A JP2013219661A JP6131822B2 JP 6131822 B2 JP6131822 B2 JP 6131822B2 JP 2013219661 A JP2013219661 A JP 2013219661A JP 2013219661 A JP2013219661 A JP 2013219661A JP 6131822 B2 JP6131822 B2 JP 6131822B2
- Authority
- JP
- Japan
- Prior art keywords
- inner product
- product value
- value
- component vector
- template
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Description
では、処理負荷の高い三角関数の演算等を行うことはできない。
5、ディスプレイ106、タッチパネル107、ROM(Read Only Memory)108、RAM(Random-Access Memory)109、加速度センサ110を備える。なお、携帯電話端末10が、情報処理装置の一例に相当する。ただし、本実施形態に開示された技術は、携帯電話端末10に限定されず、情報処理装置一般に適用できる。本実施形態において、携帯電話端末10はユーザが携帯している。
の動作状態を判定する場合、ユーザの動作データを長時間にわたって取得し、取得した動作データに基づいて動作状態を判定する。
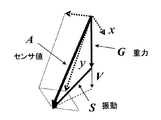
系を構成する。図4Aにおいて、加速度センサのセンサ出力AはA=(x,y,z)Tで与えられる。なお、Tは転置行列を意味する。そして、図4Aに示すように、加速度センサのセンサ出力Aは、ユーザの歩行に伴う振動Sと重力加速度Gの合成と考えることができる。
v = |S| cosθ ・・・(1)
S + G = |S| |G| cosθ ・・・(2)
v = S ・ G / |G| ・・・(3)
ルと重力成分ベクトルがそれぞれ得られる。
p = G ・ G’ = |G| |G’| cosθ ・・・(4)
ここで、ベクトルGとベクトルG’とのなす角をθとする。内積演算処理部104eから出力される内積値pは、相関演算処理部104fに送られる。
k−1に格納された内積値pの例を示す。内積演算処理部104eから出力される内積値pは、小さいインデックスの値を有するバッファから順次格納されていく。図9の場合、内積演算処理部104eから内積値pが順番に3、2、5、5と出力され、相関演算処理部104fにおいてインデックスがindex0であるバッファから順次格納されている。なお、インデックスがindexK−1であるバッファに内積値pが格納された場合、次に相関演算処理部104fに入力される内積値pは、インデックスがindex0であるバッファに戻って格納される。
回繰り返された後、処理はS314に進む。S314〜S316では、相関演算処理部104fに入力された内積値pが右端のバッファ(インデックスはK−1。図9参照)に格納された場合、次に入力される内積値pが、左端のバッファ(インデックスは0。図9参照)に格納されるようにindexの値を変更する。
コンピュータその他の機械、装置(以下、コンピュータ等)に上記情報処理装置の設定を行うための管理ツール、OSその他を実現させるプログラムをコンピュータ等が読み取り可能な記録媒体に記録することができる。ここで、設定とは、例えばボタン機能の割付等を意味する。そして、コンピュータ等に、この記録媒体のプログラムを読み込ませて実行させることにより、その機能を提供させることができる。ここで、コンピュータは、例えば、携帯電話端末等である。
3次元空間の加速度を検出する加速度センサと、
前記加速度センサのセンサ出力から重力成分ベクトルの信号を抽出するローパスフィルタと、
前記重力成分ベクトルの信号に時間遅延を付与する時間遅延部と、
前記ローパスフィルタにより抽出された重力成分ベクトルの信号と前記時間遅延部により時間遅延を付与された重力成分ベクトルの信号との内積値を算出する内積値算出部と、
所定の動作における前記内積値の時間変化を示すテンプレートをあらかじめ記憶するテンプレート記憶部と、
前記テンプレートを用いて、所定時間にわたって前記内積値算出部により算出された内積値の時間変化に対してテンプレートマッチングを行うことにより、前記所定の動作が発生したか否かを判定する動作判定部と、
を備える情報処理装置。
前記動作判定部は、前記テンプレートマッチングにおいて、前記所定時間にわたって前記内積値算出部により算出された内積値と前記テンプレートが示す内積値との差分を積算した値を一致度として算出し、前記算出した一致度が所定の閾値未満であれば前記所定の
動作が発生したと判定し、前記算出した一致度が所定の閾値以上であれば前記所定の動作が発生していないと判定する、付記1に記載の情報処理装置。
前記動作判定部は、前記内積値算出部により算出された内積値を所定の時間間隔で時系列に記憶し、前記内積値算出部により算出された内積値を新たに記憶したときに、前記新たに記憶した内積値を含む内積値の時間変化に対して前記一致度を算出する、付記2に記載の情報処理装置。
3次元空間の加速度を検出するステップと、
前記加速度から重力成分ベクトルの信号を抽出するステップと、
前記重力成分ベクトルの信号に時間遅延を付与するステップと、
前記抽出された重力成分ベクトルの信号と前記時間遅延を付与された重力成分ベクトルの信号との内積値を算出するステップと、
所定の動作における前記内積値の時間変化を示すテンプレートを用いて、所定時間にわたって前記算出された内積値の時間変化に対してテンプレートマッチングを行うことにより、前記所定の動作が発生したか否かを判定するステップと、
を有する情報処理方法。
前記所定の動作が発生したか否かを判定するステップは、前記テンプレートマッチングにおいて、前記所定時間にわたって前記算出された内積値と前記テンプレートが示す内積値との差分を積算した値を一致度として算出し、前記算出した一致度が所定の閾値未満であれば前記所定の動作が発生したと判定し、前記算出した一致度が所定の閾値以上であれば前記所定の動作が発生していないと判定する、付記4に記載の情報処理方法。
前記所定の動作が発生したか否かを判定するステップは、前記算出された内積値を所定の時間間隔で時系列に記憶し、前記算出された内積値を新たに記憶したときに、前記新たに記憶した内積値を含む内積値の時間変化に対して前記一致度を算出する、付記5に記載の情報処理装置。
3次元空間の加速度を検出するステップと、
前記加速度から重力成分ベクトルの信号を抽出するステップと、
前記重力成分ベクトルの信号に時間遅延を付与するステップと、
前記抽出された重力成分ベクトルの信号と前記時間遅延を付与された重力成分ベクトルの信号との内積値を算出するステップと、
所定の動作における前記内積値の時間変化を示すテンプレートを用いて、所定時間にわたって前記算出された内積値の時間変化に対してテンプレートマッチングを行うことにより、前記所定の動作が発生したか否かを判定するステップと、
をコンピュータに実行させるためのプログラム。
前記所定の動作が発生したか否かを判定するステップは、前記テンプレートマッチングにおいて、前記所定時間にわたって前記算出された内積値と前記テンプレートが示す内積値との差分を積算した値を一致度として算出し、前記算出した一致度が所定の閾値未満であれば前記所定の動作が発生したと判定し、前記算出した一致度が所定の閾値以上であれば前記所定の動作が発生していないと判定する、付記7に記載のプログラム。
前記所定の動作が発生したか否かを判定するステップは、前記算出された内積値を所定の時間間隔で時系列に記憶し、前記算出された内積値を新たに記憶したときに、前記新たに記憶した内積値を含む内積値の時間変化に対して前記一致度を算出する、付記8に記載のプログラム。
104a 加速度センサ出力処理プログラム
104b 動作状態判定プログラム
104c LPF
104d 遅延回路
104e 内積演算処理部
104f 相関演算処理部
104g、104o 加算器
104h 除算器
104i〜104k テンプレートデータ格納部
104l〜104n 減算器
108 ROM
109 RAM
110 加速度センサ
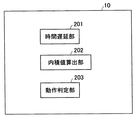
201 時間遅延部
202 内積値算出部
203 動作判定部
Claims (5)
- 3次元空間の加速度を検出する加速度センサと、
前記加速度センサのセンサ出力から重力成分ベクトルの信号を抽出するローパスフィルタと、
前記重力成分ベクトルの信号に時間遅延を付与する時間遅延部と、
前記ローパスフィルタにより抽出された重力成分ベクトルの信号と前記時間遅延部により時間遅延を付与された重力成分ベクトルの信号との内積値を算出する内積値算出部と、
所定の動作における前記内積値の時間変化を示すテンプレートをあらかじめ記憶するテンプレート記憶部と、
前記テンプレートを用いて、所定時間にわたって前記内積値算出部により算出された内積値の時間変化に対してテンプレートマッチングを行うことにより、前記所定の動作が発生したか否かを判定する動作判定部と、
を備える情報処理装置。 - 前記動作判定部は、前記テンプレートマッチングにおいて、前記所定時間にわたって前記内積値算出部により算出された内積値と前記テンプレートが示す内積値との差分を積算した値を一致度として算出し、前記算出した一致度が所定の閾値未満であれば前記所定の動作が発生したと判定し、前記算出した一致度が所定の閾値以上であれば前記所定の動作が発生していないと判定する、請求項1に記載の情報処理装置。
- 前記動作判定部は、前記内積値算出部により算出された内積値を所定の時間間隔で時系列に記憶し、前記内積値算出部により算出された内積値を新たに記憶したときに、前記新たに記憶した内積値を含む内積値の時間変化に対して前記一致度を算出する、請求項2に記載の情報処理装置。
- 3次元空間の加速度を検出するステップと、
前記加速度から重力成分ベクトルの信号を抽出するステップと、
前記重力成分ベクトルの信号に時間遅延を付与するステップと、
前記抽出された重力成分ベクトルの信号と前記時間遅延を付与された重力成分ベクトルの信号との内積値を算出するステップと、
所定の動作における前記内積値の時間変化を示すテンプレートを用いて、所定時間にわたって前記算出された内積値の時間変化に対してテンプレートマッチングを行うことにより、前記所定の動作が発生したか否かを判定するステップと、
を有する情報処理方法。 - 3次元空間の加速度を検出するステップと、
前記加速度から重力成分ベクトルの信号を抽出するステップと、
前記重力成分ベクトルの信号に時間遅延を付与するステップと、
前記抽出された重力成分ベクトルの信号と前記時間遅延を付与された重力成分ベクトルの信号との内積値を算出するステップと、
所定の動作における前記内積値の時間変化を示すテンプレートを用いて、所定時間にわたって前記算出された内積値の時間変化に対してテンプレートマッチングを行うことにより、前記所定の動作が発生したか否かを判定するステップと、
をコンピュータに実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013219661A JP6131822B2 (ja) | 2013-10-22 | 2013-10-22 | 情報処理装置、情報処理方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013219661A JP6131822B2 (ja) | 2013-10-22 | 2013-10-22 | 情報処理装置、情報処理方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015081834A JP2015081834A (ja) | 2015-04-27 |
| JP6131822B2 true JP6131822B2 (ja) | 2017-05-24 |
Family
ID=53012505
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013219661A Expired - Fee Related JP6131822B2 (ja) | 2013-10-22 | 2013-10-22 | 情報処理装置、情報処理方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6131822B2 (ja) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4967368B2 (ja) * | 2006-02-22 | 2012-07-04 | ソニー株式会社 | 体動検出装置、体動検出方法および体動検出プログラム |
| JP5417970B2 (ja) * | 2009-04-28 | 2014-02-19 | 富士通株式会社 | 歩数計及び歩数計数方法 |
| JP2012063208A (ja) * | 2010-09-15 | 2012-03-29 | Fujitsu Ltd | 状態判定装置および状態判定プログラム |
| US9436231B2 (en) * | 2011-04-07 | 2016-09-06 | Qualcomm Incorporated | Rest detection using accelerometer |
| JP2012247991A (ja) * | 2011-05-27 | 2012-12-13 | Kddi Corp | 類似度評価装置及び方法 |
-
2013
- 2013-10-22 JP JP2013219661A patent/JP6131822B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015081834A (ja) | 2015-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103517741B (zh) | 用于运动捕捉的邻近度传感器网格 | |
| JP5900655B2 (ja) | 加速度センサ出力処理プログラム,処理方法,処理装置及び歩行評価プログラム | |
| EP2784631B1 (en) | Method and wearable device to sense motion of user | |
| EP2813921B1 (en) | Method and apparatus for performing communication service based on gesture | |
| EP3671119B1 (en) | Attitude matrix calculating method and device | |
| CN106705989B (zh) | 记步方法、设备及终端 | |
| KR102697424B1 (ko) | 대표 파형 제공 장치 및 방법 | |
| Park et al. | MagTouch: Robust finger identification for a smartwatch using a magnet ring and a built-in magnetometer | |
| US20140207401A1 (en) | Apparatus for recognizing motion feature of user, method for generating orthogonal non-negative matrix factorization (onmf)-based basis matrix, and method for generating orthogonal semi-supervised non-negative matrix factorization (ossnmf)-based basis matrix | |
| US8547352B2 (en) | Method, apparatus for sensing moved touch and computer readable record-medium on which program for executing method thereof | |
| CN104238924A (zh) | 一种控制可穿戴设备屏幕点亮的方法及装置 | |
| US20120179385A1 (en) | Trajectory creating apparatus | |
| JP2017136165A (ja) | センサ情報処理装置、センサユニット、及び、センサ情報処理プログラム | |
| EP2987060A1 (en) | Id tracking of gesture touch geometry | |
| WO2017039893A1 (en) | System for sensor-based objective determination | |
| Kim et al. | VibAware: Context-Aware Tap and Swipe Gestures Using Bio-Acoustic Sensing | |
| JP2015176176A (ja) | 情報入出力装置及び情報入出力方法 | |
| CN104898942A (zh) | 一种可穿戴设备的控制方法及装置 | |
| JP6131822B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| US20150153878A1 (en) | Method of processing data by touch screen, storage medium, and electronic device | |
| JP6491920B2 (ja) | 生体信号処理装置及び生体信号処理方法 | |
| JP6277674B2 (ja) | 情報処理装置、情報処理装置の作動方法及びプログラム | |
| KR101639351B1 (ko) | 웨어러블 입력 시스템 및 모션 인식 방법 | |
| JP2017142736A (ja) | ジェスチャ認識装置、方法およびプログラム | |
| JP2013195363A (ja) | 移動状況判定プログラム及び移動状況判定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160705 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170321 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170403 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6131822 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |