JP6114709B2 - 磁気弾性センサ、このセンサを備える荷重ピン、ボールジョイントおよび牽引カップリング、荷重ベクトルの方向を決定する方法 - Google Patents
磁気弾性センサ、このセンサを備える荷重ピン、ボールジョイントおよび牽引カップリング、荷重ベクトルの方向を決定する方法 Download PDFInfo
- Publication number
- JP6114709B2 JP6114709B2 JP2014061733A JP2014061733A JP6114709B2 JP 6114709 B2 JP6114709 B2 JP 6114709B2 JP 2014061733 A JP2014061733 A JP 2014061733A JP 2014061733 A JP2014061733 A JP 2014061733A JP 6114709 B2 JP6114709 B2 JP 6114709B2
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- magnetoelastic
- sensor
- magnetic field
- magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/0001—Transmitting or indicating the displacement of elastically deformable gauges by electric, electro-mechanical, magnetic or electro-magnetic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60D—VEHICLE CONNECTIONS
- B60D1/00—Traction couplings; Hitches; Draw-gear; Towing devices
- B60D1/24—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions
- B60D1/248—Traction couplings; Hitches; Draw-gear; Towing devices characterised by arrangements for particular functions for measuring, indicating or displaying the weight
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C11/00—Pivots; Pivotal connections
- F16C11/04—Pivotal connections
- F16C11/06—Ball-joints; Other joints having more than one degree of angular freedom, i.e. universal joints
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/12—Measuring force or stress, in general by measuring variations in the magnetic properties of materials resulting from the application of stress
- G01L1/125—Measuring force or stress, in general by measuring variations in the magnetic properties of materials resulting from the application of stress by using magnetostrictive means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P13/00—Indicating or recording presence, absence, or direction, of movement
- G01P13/02—Indicating direction only, e.g. by weather vane
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/102—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving magnetostrictive means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T403/00—Joints and connections
- Y10T403/20—Joints and connections with indicator or inspection means
Landscapes
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electrochemistry (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Transportation (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
場ベクトルの接線成分は無視される。これは、主として、これらの従来のセンサは、せん断応力を測定するトルクセンサであるという事実によるものである。この状況では、磁気誘発された磁場ベクトルは、シャフトの軸方向に対してほぼ平行である。しかし、本発明の態様による磁気弾性センサは、磁場ベクトルの接線成分を感知し、したがって、シャフト状部材内の引っ張りまたは圧縮の応力になり得る法線応力を決定することができる。このタイプの応力は、シャフトの曲がり、または軸方向荷重を受けることによる場合がある。換言すれば、引っ張り応力および圧縮応力は、好ましくは、シャフトのほぼ軸方向に作用した力によるものである。
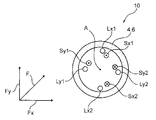
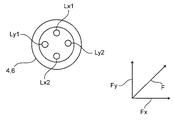
サは、センサの第1のグループを形成することができ、第2および第4の磁場センサは、センサの第2のグループを形成することができる。デカルト座標系で考えた場合、センサの第1のグループは、第1のデカルト軸、たとえばX軸に沿って指向された荷重成分を決定するのに適している。センサの第2のグループは、第1の成分に対してほぼ直角である荷重の成分を感知する。これを同じデカルト座標系で考えた場合、センサの第2のグループは、Y方向の力成分を感知する。換言すれば、荷重のXおよびYの成分を決定できる。その結果、シャフト状部材に作用した応力または力の方向および値は、たとえばデカルト座標系において前記成分から決定できる。
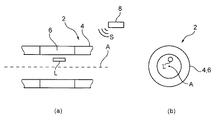
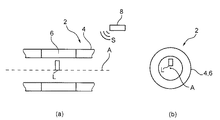
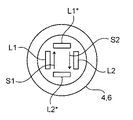
サの対が第1の活動部位61と共働するように、シャフト状部材4の内側に配置される。同様に、第1のセンサL1*および第2のセンサL2*を備える磁場センサの第2の対は、第2の活動部位62と相互作用するようにシャフト4の内側に配置される。第1の対のセンサL1、L2および第2の対のセンサL1*、L2*は、それぞれ、第1および第2の磁気弾性活動部位61、62の近くに配置される。第1のセンサ対L1、L2は第1の信号Sを出力し、この信号は、図8aの下側左に、作用した力Fに伴って変化する電圧Vとして示される。信号Sは、第1の磁気分極領域61から発生する応力誘起磁束に対応する。
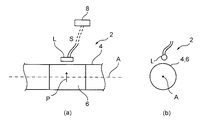
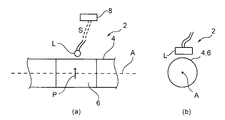
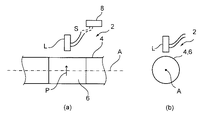
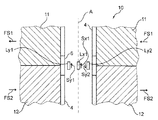
、L2、L1*、およびL2*を備える。方向感知性センサL1、L2、L1*、L2*は、図9および10の実施形態のセンサLX1、LX2、LY1およびLY2との対比した場合、軸芯Aに対して90°傾斜される。専ら明確にするために、2つだけが示される磁場センサの感知方向(第1および第2のセンサL1、L2のS1、S2を参照されたい)は、シャフト状部材4の軸芯Aに対してほぼ直角である。さらに、センサの対L1およびL2の感知方向、すなわちS1およびS2は、互いに180°反対である。同様に、第2のセンサ対の感知方向(図示せず)S1*およびS2*は、互いにほぼ180°反対である。これは、図12の簡略化された断面にさらに示される。図8の実施形態と同様に、図11および12のセンサ配置は、さまざまな方向の引っ張り応力および圧縮応力を決定するように構成される。換言すれば、センサ対L1、L2およびL1*、L2*の測定値が、応力ベクトルの成分を決定するために評価されていてもよい。
Claims (13)
- 長手方向に延び、軸芯を有するシャフト状部材であって、前記シャフト状部材内に機械的応力をもたらす荷重を受ける、前記シャフト状部材と、
少なくとも一つの磁気弾性活動部位であって、前記磁気弾性活動部位は、前記機械的応力が前記磁気弾性活動部位に伝えられるような仕方で前記シャフト状部材の一部に直接的もしくは間接的に取り付けられ、または前記シャフト状部材の一部を形成し、作用した前記機械的応力が増大するにつれて磁気分極が次第にらせん状になるような円周方向の磁気分極を有する磁気分極領域を含む、前記少なくとも一つの磁気弾性活動部位と、
前記磁気分極領域から発生する応力誘起磁束に対応する信号を出力するための、前記少なくとも一つの磁気弾性活動部位の近くに配置された磁気センサ手段と、
を備える、磁気弾性センサであって、
前記荷重は、少なくとも曲げ応力、せん断応力、軸方向の応力のいずれか一つであり、
前記磁気センサ手段は、前記荷重の結果として生じる荷重ベクトルを決定するために構成された、第1の感知方向を有する第1の方向感知性磁場センサ及び第2の感知方向を有する第2の方向感知性磁場センサを備え、
前記第1及び第2の方向感知性磁場センサは、当該第1及び第2の感知方向が前記軸芯の方向に対して少なくともほぼ平行になるように、または前記シャフト状部材の接線方向に対して少なくともほぼ平行になるように配置され、
前記第1及び第2の感知方向は、互いに180°反対であり、
前記第1及び第2の方向感知性磁場センサは、予め設定された既知の空間座標を前記シャフト状部材に対して有するように配置されていることを特徴とする、磁気弾性センサ。 - 前記第1および前記第2の方向感知性磁場センサは、前記磁気弾性活動部位の両側の近くにそれぞれ配置され、前記磁気弾性活動部位のそれぞれの側が前記軸芯の反対側にある、請求項1に記載の磁気弾性センサ。
- 前記センサ手段は、第3の感知方向を有する第3の方向感知性磁場センサと第4の感知方向を有する第4の方向感知性磁場センサをさらに備え、前記第1から第4の感知方向と前記軸芯とは、互いに少なくともほぼ平行であり、前記第1から第4の磁場センサは、前記シャフトの円周に沿って、互いに円周方向にほぼ等しい距離を有して配置される、請求項1又は2に記載の磁気弾性センサ。
- 前記第1および第3の磁場センサは、前記軸芯に対して互いに反対に配置され、前記第1および第3の感知方向は、互いに180°反対に配置され、前記第2および第4の磁場センサは、前記軸芯に対して互いに反対に配置され、前記第2および第4の感知方向は、互いに180°反対に配置される、請求項3に記載の磁気弾性センサ。
- 前記シャフト状部材は、第1の磁気弾性活動部位および第2の磁気弾性活動部位を前記少なくとも一つの磁気弾性活動部位として備え、前記第1、第2の磁気弾性活動部位は、前記機械的応力が前記磁気弾性活動部位に伝えられるような仕方で、前記シャフト状部材の一部に直接的もしくは間接的に取り付けられ、または前記シャフト状部材の一部を形成し、
各磁気弾性活動部位は、それぞれ磁気分極領域を含み、前記第1の活動部位の磁気分極および前記第2の活動部位の磁気分極は、互いにほぼ反対であり、
前記磁気センサ手段は、第1の対の磁場センサを備え、前記第1の対の磁場センサは、前記第1の磁気分極領域から発生する応力誘起磁束に対応する第1の信号を出力するために前記第1の磁気弾性活動部位の近くに配置された第1および第2の磁場センサを備え、
前記磁気センサ手段は、第2の対の磁場センサを備え、前記第2の対の磁場センサは、
前記第2の磁気分極領域から発生する応力誘起磁束に対応する第2の信号を出力するために前記第2の磁気弾性活動部位の近くに配置された第1および第2の磁場センサを備え、
前記磁気弾性センサはさらに、制御ユニットを備え、前記制御ユニットは、センサの前記第1の対およびセンサの前記第2の対の前記信号の差分評価を実施することによって前記シャフト状部材に作用した前記応力を決定するように構成されている、請求項1から4までのいずれか1項に記載の磁気弾性センサ。 - 前記シャフト状部材は、少なくとも部分的に中空のシャフトであり、前記センサ手段のすべての磁場センサは、全体的に、前記中空シャフトの内部の内側に配置される、請求項1から5までのいずれか1項に記載の磁気弾性センサ。
- 前記磁気弾性活動部位は、前記シャフト状部材の円周に沿って突出し、前記少なくとも1つの磁気弾性活動部位は、前記磁気分極領域における磁化された範囲が、最大でも前記シャフト状部材の円周方向のプラスマイナス45°の限界値内にあるように磁化される、請求項1から6までのいずれか1項に記載の磁気弾性センサ。
- 請求項1から7までのいずれか1項に記載の磁気弾性センサを構成している長手方向に延びるシャフト状部材を有する荷重ピン。
- 軸受スタッドおよびソケットを有するボールジョイントであって、前記受けスタッドは、請求項1から7までのいずれか1項に記載の磁気弾性センサを構成している長手方向に延びるシャフト状部材を備える、ボールジョイント。
- 湾曲したシャフトおよびけん引ボールを有する牽引カップリングであって、前記湾曲したシャフトは、請求項1から7までのいずれか1項に記載の磁気弾性センサを構成している少なくとも1つの長手方向に延びるシャフト状部材を備え、前記湾曲したシャフトは、第1および第2の長手方向に延びるシャフト状部材を備え、前記第1、第2シャフト状部材の軸芯は、互いにほぼ直角であり、前記第1および前記第2の長手方向に延びるシャフト状部材の各々は、請求項1から7までのいずれか1項に記載の磁気弾性センサを構成している、牽引カップリング。
- 少なくとも曲げ応力、せん断応力、軸方向の応力のいずれか一つである荷重の荷重ベクトルの方向を決定する方法であって、
磁気弾性センサを設けるステップであって、前記磁気弾性センサが、長手方向に延び、軸芯を有するシャフト状部材であって、前記シャフト状部材内に機械的応力をもたらす荷重を受ける前記シャフト状部材と、円周方向の磁気分極を有する少なくとも1つの磁気弾性活動部位であって、前記機械的応力が前記磁気弾性活動部位に伝えられるような仕方で、前記シャフト状部材の一部に直接的もしくは間接的に取り付けられ、または前記シャフト状部材の一部を形成し、作用した応力が増大するにつれて磁気分極が次第にらせん形状になるような、少なくとも1つの磁気分極領域を含む、前記少なくとも1つの磁気弾性活動部位と、磁気センサ手段であって、前記磁気分極領域から発生する応力誘起磁束に対応する信号を出力するために前記少なくとも1つの磁気弾性活動部位の近くに配置された前記磁気センサ手段とを備え、前記磁気センサ手段は、前記荷重の結果として生じる荷重ベクトルを決定するために構成された、第1の感知方向を有する第1の方向感知性磁場センサ及び第2の感知方向を有する第2の方向感知性磁場センサを備え、前記磁場センサは、予め設定された既知の空間座標を前記シャフト状部材に対して有するように配置されており、前記第1及び第2の方向感知性磁場センサは、当該第1及び第2の感知方向が前記軸芯の方向に対して少なくともほぼ平行になるように、または前記シャフト状部材の接線方向に対して少なくともほぼ平行になるように配置され、前記第1及び第2の感知方向は、互いに180°反対である、前記磁気弾性センサを設けるステップと、
前記長手方向に延びるシャフト状部材を前記荷重にさらすステップと、
前記第1及び第2の方向感知性磁場センサの測定データを処理して、せん断応力および/または引っ張りまたは圧縮の応力を決定し、前記荷重ベクトルの方向を前記測定データおよび前記第1及び第2の方向感知性磁場センサと前記シャフト状部材の間の前記予め設定された既知の空間座標から決定するステップとを含む、荷重ベクトルの方向を決定する方法。 - 請求項11に記載の荷重ベクトルの方向を決定する方法であって、
前記磁気センサ手段が、第3の感知方向を有する第3の方向感知性磁場センサと第4の感知方向を有する第4の方向感知性磁場センサを備え、前記第1から第4の感知方向と前記軸芯とが、互いに少なくともほぼ平行であり、前記第1から第4の方向感知性磁場センサが、前記シャフトの円周に沿って互いに円周方向にほぼ等しい距離を有して配置されている、前記荷重ベクトルの方向を決定する方法は、さらに、
前記第1および第3の磁場センサの測定データを処理して、荷重ベクトルの第1の成分を決定するステップと、
前記第2および第4の磁場センサの測定データを処理して、前記荷重ベクトルの第2の成分を決定するステップと、
前記長手方向に延びるシャフト状部材が受ける前記荷重ベクトルの方向を、前記決定された第1および第2の成分ならびに前記シャフト状部材に対する前記第1から第4の磁場センサの予め設定された既知の空間座標から決定するステップと
を含む、請求項11に記載の荷重ベクトルの方向を決定するための方法。 - 請求項11または12に記載の荷重ベクトルの方向を決定するための方法であって、
前記シャフト状部材が、第1の磁気弾性活動部位および第2の磁気弾性活動部位を前記少なくとも一つの磁気弾性活動部位として備え、前記第1の磁気弾性活動部位および第2の磁気弾性活動部位が、前記機械的応力が前記磁気弾性活動部位に伝えられるような仕方で前記シャフト状部材の一部に直接的もしくは間接的に取り付けられ、または前記シャフト状部材の一部を形成し、各活動部位が、磁気分極領域を含み、前記第1の活動部位の磁気分極および前記第2の活動部位の磁気分極が、互いにほぼ反対であり、前記磁気センサ手段が、第1の対の磁場センサを備え、前記第1の対の磁場センサが、前記第1の磁気分極領域から発生する応力誘起磁束に対応する第1の信号を出力するために前記第1の磁気弾性活動部位の近くに配置された第1および第2の磁場センサを備え、前記磁気センサ手段が、第2の対の磁場センサを備え、前記第2の対の磁場センサが、前記第2の磁気分極領域から発生する応力誘起磁束に対応する第2の信号を出力するために前記第2の磁気弾性活動部位の近くに配置された第1および第2の磁場センサを備えている、前記荷重ベクトルの方向を決定するための方法は、さらに、
センサの前記第1の対およびセンサの前記第2の対の差分評価を実施して前記シャフト状部材に作用した前記応力を決定するステップを含む、請求項11または12に記載の荷重ベクトルの方向を決定するための方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13163832.2A EP2793009B1 (en) | 2013-04-15 | 2013-04-15 | Magneto-elastic sensor, load pin, ball-joint and tow coupling comprising this sensor, method of determining a direction of a load vector |
| EP13163832.2 | 2013-04-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014206531A JP2014206531A (ja) | 2014-10-30 |
| JP6114709B2 true JP6114709B2 (ja) | 2017-04-12 |
Family
ID=48092825
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014061733A Active JP6114709B2 (ja) | 2013-04-15 | 2014-03-25 | 磁気弾性センサ、このセンサを備える荷重ピン、ボールジョイントおよび牽引カップリング、荷重ベクトルの方向を決定する方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9347845B2 (ja) |
| EP (1) | EP2793009B1 (ja) |
| JP (1) | JP6114709B2 (ja) |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2013179646A1 (ja) * | 2012-05-31 | 2016-01-18 | パナソニックIpマネジメント株式会社 | トルク検出装置 |
| DE102014103462B4 (de) * | 2014-03-13 | 2025-11-06 | General Dynamics European Land Systems - Mowag Gmbh | Verfahren zum Dämpfen von im Überlastfall einwirkenden Belastungen zum Schutz vor Schäden |
| DE102015202240B3 (de) | 2015-02-09 | 2016-02-25 | Schaeffler Technologies AG & Co. KG | Anordnung zur Messung einer Kraft oder eines Momentes mit mindestens drei Magnetfeldsensoren |
| DE102015202239B3 (de) * | 2015-02-09 | 2016-02-25 | Schaeffler Technologies AG & Co. KG | Anordnung zur Messung einer Kraft oder eines Momentes mit mindestens vier Magnetfeldsensoren |
| DE202015105090U1 (de) | 2015-02-18 | 2015-11-23 | Methode Electronics Malta Ltd. | Redundanter Drehmomentsensor - Multiple Bandanordnung |
| DE102015102337B4 (de) | 2015-02-18 | 2016-11-17 | Methode Electronics Malta Ltd. | Redundanter Drehmomentsensor - Multiple Bandanordnung |
| DE102015209286A1 (de) | 2015-05-21 | 2016-11-24 | Schaeffler Technologies AG & Co. KG | Anordnung und Verfahren zum Messen einer Kraft oder eines Momentes mit mindestens zwei beabstandeten Magnetfeldsensoren |
| DE202015105069U1 (de) | 2015-09-24 | 2015-12-16 | Methode Electronics Malta Ltd. | Sensoreinrichtung mit einem Träger |
| DE102015116202B4 (de) | 2015-09-24 | 2017-11-02 | Methode Electronics Malta Ltd. | Sensoreinrichtung mit einem Träger |
| US10488278B2 (en) | 2015-09-24 | 2019-11-26 | Methode Electronics Malta Ltd. | Planar magnetoelastic force sensor |
| DE102015117086A1 (de) * | 2015-10-07 | 2017-04-13 | Schwing Gmbh | Abstützvorrichtung zum Abstützen einer mobilen Vorrichtung |
| DE102015122154B4 (de) | 2015-12-17 | 2018-09-27 | Methode Electronics Malta Ltd. | Vorrichtung zur Feststellung externer magnetischer Streufelder auf einen Magnetfeldsensor |
| DE102016110460A1 (de) * | 2016-03-23 | 2017-09-28 | Westfalia-Automotive Gmbh | Tragelement mit einem Sensor |
| EP3458805B1 (en) | 2016-05-17 | 2020-09-23 | Kongsberg Inc. | System, method and object for high accuracy magnetic position sensing |
| EP3551982A4 (en) | 2016-12-12 | 2020-08-05 | Kongsberg Inc. | DOUBLE BAND MAGNETOELASTIC TORQUE SENSOR |
| EP3379222B1 (en) * | 2017-03-22 | 2020-12-30 | Methode Electronics Malta Ltd. | Magnetoelastic based sensor assembly |
| DE102017109534B4 (de) | 2017-05-04 | 2019-10-24 | Schaeffler Technologies AG & Co. KG | Anordnung und Verfahren zum Messen einer Kraft oder eines Momentes an einem Maschinenelement mit mindestens zwei Magnetfeldsensoren |
| DE102017109532A1 (de) | 2017-05-04 | 2018-11-08 | Schaeffler Technologies AG & Co. KG | Anordnung und Verfahren zum Messen eines Drehmomentes an einem Maschinenelement mit zwei Magnetfeldsensoren |
| DE102017109535B4 (de) | 2017-05-04 | 2019-12-12 | Schaeffler Technologies AG & Co. KG | Verfahren zum Messen eines Biegemomentes an einem Maschinenelement |
| DE102017109536B4 (de) | 2017-05-04 | 2020-04-23 | Schaeffler Technologies AG & Co. KG | Anordnung und Verfahren zum Messen einer Kraft oder eines Momentes an einem Maschinenelement mit mindestens drei Magnetisierungsbereichen |
| DE102017114170B3 (de) | 2017-06-27 | 2018-03-22 | Schaeffler Technologies AG & Co. KG | Anordnung und Verfahren zum Messen eines Biegemomentes an einem Maschinenelement |
| DE102017117881A1 (de) * | 2017-08-07 | 2019-02-07 | Methode Electronics Malta Ltd. | Magnetoelastischer Scherkraftsensor mit Störfeldkompensation und Verfahren |
| US11428589B2 (en) | 2017-10-16 | 2022-08-30 | Saf-Holland, Inc. | Displacement sensor utilizing ronchi grating interference |
| US10589583B2 (en) * | 2017-11-16 | 2020-03-17 | Ford Global Technologies, Llc | Systems and methods for magnetoelastic hitch receiver force detection |
| DE102018202854B4 (de) * | 2018-02-26 | 2020-01-02 | Audi Ag | Verfahren zum Betrieb eines Bordnetzes eines Hybridkraftfahrzeugs und Hybridkraftfahrzeug |
| US11221262B2 (en) | 2018-02-27 | 2022-01-11 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11014417B2 (en) * | 2018-02-27 | 2021-05-25 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11135882B2 (en) | 2018-02-27 | 2021-10-05 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11491832B2 (en) | 2018-02-27 | 2022-11-08 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| EP3758959B1 (en) * | 2018-02-27 | 2025-11-05 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11084342B2 (en) | 2018-02-27 | 2021-08-10 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11548334B2 (en) | 2018-06-19 | 2023-01-10 | Ford Global Technologies, Llc | Methods and apparatus for a single pin load sensor coupled to a hitch receiver |
| DE102018116595A1 (de) | 2018-07-09 | 2020-01-09 | Methode Electronics Malta Ltd. | Mehrpunkt-Magnetometer mit symmetrischer Ausgestaltung |
| US11008014B2 (en) * | 2018-08-14 | 2021-05-18 | Ford Global Technologies, Llc | Methods and apparatus to determine vehicle weight information based on ride height |
| US10589700B2 (en) | 2018-08-17 | 2020-03-17 | Ford Global Technologies, Llc | Methods and apparatus for categorization of vehicle loading and display thereof |
| DE102018131737A1 (de) * | 2018-12-11 | 2020-06-18 | ACPS Automotive GmbH | Kupplungseinheit |
| US11097580B2 (en) | 2018-12-21 | 2021-08-24 | Ford Global Technologies, Llc | Methods and apparatus for a modular double pin load sensor coupled to a hitch receiver |
| DE102019108898B4 (de) * | 2019-04-04 | 2022-08-04 | Trafag Ag | Vorrichtung und Anordnung zur Belastungsmessung an einem Testobjekt, insbesondere einer Fahrwerkskomponente |
| DE102020121043A1 (de) | 2019-08-09 | 2021-02-11 | Ford Global Technologies, Llc | Verfahren und vorrichtung für ein doppelt reagierendes, an eine aufnahmevorrichtung einer anhängerkupplung gekoppeltes einzellastsensorelement |
| US11607919B2 (en) | 2019-08-09 | 2023-03-21 | Ford Global Technologies, Llc | Methods and apparatus for a dual reacting, single load sensing element coupled to a hitch receiver |
| EP3812181B1 (en) * | 2019-08-19 | 2025-11-05 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US12292350B2 (en) | 2019-09-13 | 2025-05-06 | Brp Megatech Industries Inc. | Magnetoelastic torque sensor assembly for reducing magnetic error due to harmonics |
| CN110686818B (zh) * | 2019-09-19 | 2021-11-12 | 济南北环铁路有限公司 | 一种钢绞线斜拉索索力的快速测定方法 |
| EP3858647A1 (en) | 2020-01-31 | 2021-08-04 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| DE21154273T1 (de) | 2020-01-31 | 2021-12-30 | Methode Electronics, Inc. | Schleppsysteme und -verfahren mit verwendung von magnetfeldmessung |
| EP3858646B1 (en) | 2020-01-31 | 2026-04-08 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| WO2021161066A1 (en) | 2020-02-11 | 2021-08-19 | Ka Group Ag | Magnetoelastic torque sensor with local measurement of ambient magnetic field |
| US11524534B2 (en) | 2020-04-14 | 2022-12-13 | Ford Global Technologies, Llc | Methods and apparatus for a load-sensing hitch utilizing a system of strain gauges |
| RU2764001C1 (ru) * | 2021-04-29 | 2022-01-12 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Тюменский индустриальный университет" | Способ контроля механических напряжений в стальных конструкциях магнитоупругим методом |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5351555A (en) * | 1991-07-29 | 1994-10-04 | Magnetoelastic Devices, Inc. | Circularly magnetized non-contact torque sensor and method for measuring torque using same |
| KR100500560B1 (ko) * | 1997-03-28 | 2005-07-12 | 만네스만 파우데오 아게 | 자기탄성 트랜스듀서 제조 방법 |
| US6047605A (en) | 1997-10-21 | 2000-04-11 | Magna-Lastic Devices, Inc. | Collarless circularly magnetized torque transducer having two phase shaft and method for measuring torque using same |
| GB9808792D0 (en) * | 1998-04-23 | 1998-06-24 | Effective Torque Technologies | Magnetising arrangements for torque/force sensor |
| GB9919065D0 (en) * | 1999-08-12 | 1999-10-13 | Fast Technology Gmbh | Transducer Element |
| US6341534B1 (en) * | 2000-03-03 | 2002-01-29 | Ford Motor Company | Integrated two-channel torque sensor |
| AU2002213899A1 (en) * | 2000-09-12 | 2002-03-26 | Fast Technology Ag. | Magnetic torque sensor system |
| JP4527448B2 (ja) * | 2004-06-10 | 2010-08-18 | トヨタ自動車株式会社 | 軸部材のねじれトルクセンサ及びその製造方法 |
| JP5151551B2 (ja) * | 2008-02-27 | 2013-02-27 | 大同特殊鋼株式会社 | 薄膜磁気センサ |
| KR101643182B1 (ko) | 2008-03-14 | 2016-07-27 | 마그나-라스틱 디바이시스, 인코포레이티드 | 주위 자기장 차단 자기탄성 토크 센서 |
| US8001849B2 (en) * | 2009-03-28 | 2011-08-23 | Wensheng Weng | Self-compensating magnetoelastic torque sensor system |
| WO2011085400A1 (en) * | 2010-01-11 | 2011-07-14 | Magcanica, Inc. | Magnetoelastic force sensors, transducers, methods, and systems for assessing bending stress |
| US8424393B1 (en) * | 2011-10-18 | 2013-04-23 | Methode Electronics, Inc. | Magnetic torque sensor for transmission converter drive plate |
| US8893562B2 (en) * | 2011-11-21 | 2014-11-25 | Methode Electronics, Inc. | System and method for detecting magnetic noise by applying a switching function to magnetic field sensing coils |
-
2013
- 2013-04-15 EP EP13163832.2A patent/EP2793009B1/en active Active
-
2014
- 2014-03-25 JP JP2014061733A patent/JP6114709B2/ja active Active
- 2014-04-14 US US14/251,760 patent/US9347845B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2793009B1 (en) | 2021-03-17 |
| US20140360282A1 (en) | 2014-12-11 |
| US9347845B2 (en) | 2016-05-24 |
| EP2793009A1 (en) | 2014-10-22 |
| JP2014206531A (ja) | 2014-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6114709B2 (ja) | 磁気弾性センサ、このセンサを備える荷重ピン、ボールジョイントおよび牽引カップリング、荷重ベクトルの方向を決定する方法 | |
| US10940726B2 (en) | Magnetoelastic based sensor assembly | |
| EP3758961B1 (en) | Towing systems and methods using magnetic field sensing | |
| EP3758959B1 (en) | Towing systems and methods using magnetic field sensing | |
| US11221262B2 (en) | Towing systems and methods using magnetic field sensing | |
| US7770461B2 (en) | Brake-force-sensing device for vehicle running gears | |
| US11135882B2 (en) | Towing systems and methods using magnetic field sensing | |
| US20200198421A1 (en) | Towing systems and methods using magnetic field sensing | |
| US11491832B2 (en) | Towing systems and methods using magnetic field sensing | |
| US10627299B2 (en) | Magnetoelastic shear force sensor with interference field compensation and method | |
| EP3900960B1 (en) | Towing systems and methods using magnetic field sensing | |
| JP7304327B2 (ja) | 横圧測定装置、及び、横圧測定方法 | |
| EP3812181B1 (en) | Towing systems and methods using magnetic field sensing | |
| EP3858647A1 (en) | Towing systems and methods using magnetic field sensing | |
| EP3858646A1 (en) | Towing systems and methods using magnetic field sensing | |
| JP2008215980A (ja) | センサ付車輪用軸受 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150305 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160301 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160530 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20160728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160913 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20161212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170317 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6114709 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |