JP6113682B2 - Medical device handle and medical device - Google Patents
Medical device handle and medical device Download PDFInfo
- Publication number
- JP6113682B2 JP6113682B2 JP2014054700A JP2014054700A JP6113682B2 JP 6113682 B2 JP6113682 B2 JP 6113682B2 JP 2014054700 A JP2014054700 A JP 2014054700A JP 2014054700 A JP2014054700 A JP 2014054700A JP 6113682 B2 JP6113682 B2 JP 6113682B2
- Authority
- JP
- Japan
- Prior art keywords
- handle
- switching
- members
- rotating
- rotating plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000006073 displacement reaction Methods 0.000 claims description 47
- 230000007246 mechanism Effects 0.000 claims description 25
- 238000005452 bending Methods 0.000 claims description 8
- 230000005489 elastic deformation Effects 0.000 claims 1
- 230000004048 modification Effects 0.000 description 28
- 238000012986 modification Methods 0.000 description 28
- 230000000694 effects Effects 0.000 description 13
- 210000003811 finger Anatomy 0.000 description 13
- 230000006793 arrhythmia Effects 0.000 description 12
- 206010003119 arrhythmia Diseases 0.000 description 12
- 230000000052 comparative effect Effects 0.000 description 12
- 238000004519 manufacturing process Methods 0.000 description 10
- 210000004204 blood vessel Anatomy 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 230000009471 action Effects 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 238000003780 insertion Methods 0.000 description 6
- 230000037431 insertion Effects 0.000 description 6
- 229920003002 synthetic resin Polymers 0.000 description 6
- 239000000057 synthetic resin Substances 0.000 description 6
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 210000004247 hand Anatomy 0.000 description 4
- 239000007769 metal material Substances 0.000 description 4
- -1 polyoxymethylene Polymers 0.000 description 4
- 238000003825 pressing Methods 0.000 description 4
- HZEWFHLRYVTOIW-UHFFFAOYSA-N [Ti].[Ni] Chemical compound [Ti].[Ni] HZEWFHLRYVTOIW-UHFFFAOYSA-N 0.000 description 3
- 239000010949 copper Substances 0.000 description 3
- 229920000098 polyolefin Polymers 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 229930040373 Paraformaldehyde Natural products 0.000 description 2
- 239000004952 Polyamide Substances 0.000 description 2
- XECAHXYUAAWDEL-UHFFFAOYSA-N acrylonitrile butadiene styrene Chemical compound C=CC=C.C=CC#N.C=CC1=CC=CC=C1 XECAHXYUAAWDEL-UHFFFAOYSA-N 0.000 description 2
- 229920000122 acrylonitrile butadiene styrene Polymers 0.000 description 2
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 2
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 230000004323 axial length Effects 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 229910001000 nickel titanium Inorganic materials 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 229920002647 polyamide Polymers 0.000 description 2
- 229920006324 polyoxymethylene Polymers 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 1
- 239000004721 Polyphenylene oxide Substances 0.000 description 1
- 238000002679 ablation Methods 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 229910052731 fluorine Inorganic materials 0.000 description 1
- 239000011737 fluorine Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 229920000570 polyether Polymers 0.000 description 1
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 239000011148 porous material Substances 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0136—Handles therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00839—Bioelectrical parameters, e.g. ECG, EEG
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1467—Probes or electrodes therefor using more than two electrodes on a single probe
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Surgery (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Pulmonology (AREA)
- Cardiology (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Otolaryngology (AREA)
- Biophysics (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Surgical Instruments (AREA)
Description
本発明は、例えば不整脈の検査(診断)や治療等に用いられる電極カテーテルやシースイントロデューサなどの医療機器、およびこのような医療機器に適用される医療機器用ハンドルに関する。 The present invention relates to medical devices such as electrode catheters and sheath introducers used for, for example, arrhythmia examination (diagnosis) and treatment, and a medical device handle applied to such medical devices.
電極カテーテルは、血管を通して体内(例えば心臓の内部)に挿入され、不整脈の検査や治療等に用いられるものである。このような電極カテーテルでは一般に、体内に挿入されたカテーテルチューブの先端(遠位端)付近の形状が、体外に配置される基端(近位端,後端,手元側)に装着された操作部の操作に応じて、片方向あるいは両方向に変化(偏向,湾曲、撓む)するようになっている。 An electrode catheter is inserted into a body (for example, the inside of a heart) through a blood vessel, and is used for arrhythmia examination or treatment. In such electrode catheters, in general, the shape near the tip (distal end) of the catheter tube inserted into the body is attached to the proximal end (proximal end, rear end, hand side) placed outside the body. Depending on the operation of the part, it changes (deflects, curves, bends) in one direction or both directions.
また、このような電極カテーテル等のカテーテルを体内に挿入する際に、先行して血管内に導入されてカテーテルの挿入を補助する役割を果たすシース(シースチューブ)を備えたシースイントロデューサ(カテーテルシース装置)が知られている。 In addition, when inserting a catheter such as an electrode catheter into the body, a sheath introducer (catheter sheath) provided with a sheath (sheath tube) that is introduced into the blood vessel and assists the insertion of the catheter in advance. Device) is known.
このような電極カテーテルやシースイントロデューサ等の医療機器用のハンドルの一例としては、例えば特許文献1に開示されているように、ハンドル本体に対して回転自在に装着された回転板を含む操作部(回転操作部)を用いるようにしたものが挙げられる。この回転板上には、カテーテルチューブやシースチューブ等のチューブ状部材における先端付近を撓ませるための操作用ワイヤの基端側が、これらのチューブ状部材内から延伸されている。このような構成により、回転板を回転操作することで、チューブ状部材における先端付近を撓ませることが可能となっている。
As an example of such a handle for a medical device such as an electrode catheter or a sheath introducer, as disclosed in
ところで、上記したような医療機器では、使用状況によっては、チューブ状部材の先端付近の湾曲状態を保持しておきたいケースがある。このようなケースにおいて、例えば上記特許文献1の医療機器用ハンドルでは、ハンドル本体に設けられた摘みをねじって回転板をハンドル本体に固定することで、回転板の回転位置(先端付近の湾曲状態)が固定化される(保持される)ようになっている。
By the way, in the medical device as described above, there is a case where it is desired to keep the curved state in the vicinity of the tip of the tubular member depending on the use situation. In such a case, for example, in the medical device handle disclosed in
ところが、操作者がこのような作業を行う際には、一方の手で回転板を所望の回転位置に固定しつつ、もう一方の手でハンドル本体上の摘みをねじる必要がある。つまり、双方の手を使用した操作を要することになる。したがって、作業効率が悪くなって操作性が低下してしまうおそれがあるため、操作性を向上させる手法の提案が望まれる。 However, when the operator performs such work, it is necessary to twist the knob on the handle body with the other hand while fixing the rotating plate at a desired rotational position with one hand. That is, an operation using both hands is required. Therefore, there is a possibility that the work efficiency is deteriorated and the operability is lowered, and therefore, a proposal of a method for improving the operability is desired.
本発明はかかる問題点に鑑みてなされたもので、その目的は、操作性を向上させることが可能な医療機器用ハンドルおよび医療機器を提供することにある。 The present invention has been made in view of such a problem, and an object thereof is to provide a medical device handle and a medical device capable of improving operability.
本発明の医療機器用ハンドルは、可撓性を有するチューブ状部材の基端側に装着されるハンドルであって、ハンドル本体と、チューブ状部材の先端付近を撓ませる回転操作の際に用いられる回転操作部とを備えたものである。この回転操作部は、ハンドル本体に対して回転自在に装着されると共に、その回転軸の直交方向に沿って少なくとも一部分が弾性変位可能に構成された回転板と、この回転板における回転軸の直交方向に沿った位置状態に応じて、上記回転操作が可能となって回転板の回転位置が任意に設定されるフリー状態と、上記回転操作が不能となって回転板の回転位置が固定化されるロック状態と、の切り換えを行う切換機構とを有している。また、ハンドル本体は、回転軸に沿って互いに対向する第1および第2のハンドル部材により構成され、上記回転板は、第1および第2のハンドル部材の間で互いに対向配置され、第1のハンドル部材側に位置する第1の回転部材と、第2のハンドル部材側に位置すると共に上記弾性変位が可能な第2の回転部材とにより構成され、上記切換機構は、第2のハンドル部材に設けられた第1の切換部材と、第2の回転部材に設けられた第2の切換部材とにより構成されている。
The handle for a medical device according to the present invention is a handle attached to the proximal end side of a flexible tubular member, and is used in a rotating operation for bending the handle body and the vicinity of the distal end of the tubular member. And a rotation operation unit. The rotation operation unit is rotatably attached to the handle body, and at least a part of the rotation operation unit is configured to be elastically displaceable along the orthogonal direction of the rotation axis, and the rotation axis of the rotation plate is orthogonal. According to the position state along the direction, the rotation operation is possible and the rotation position of the rotation plate is arbitrarily set, and the rotation operation is disabled and the rotation position of the rotation plate is fixed. And a switching mechanism for switching between them. The handle body is configured by first and second handle members facing each other along the rotation axis, and the rotating plate is disposed to face each other between the first and second handle members. The first rotating member located on the handle member side and the second rotating member located on the second handle member side and capable of the elastic displacement, and the switching mechanism is arranged on the second handle member. The first switching member is provided, and the second switching member is provided on the second rotating member.
本発明の医療機器は、可撓性を有するチューブ状部材と、このチューブ状部材の基端側に装着された、上記本発明の医療機器用ハンドルとしてのハンドルとを備えたものである。 The medical device of the present invention comprises a flexible tubular member and a handle as the medical device handle of the present invention mounted on the proximal end side of the tubular member.
本発明の医療機器用ハンドルおよび医療機器では、回転軸の直交方向に沿って少なくとも一部分が弾性変位可能に回転板が構成されていると共に、この回転板における回転軸の直交方向に沿った位置状態に応じて上記フリー状態と上記ロック状態との切り換えを行う切換機構が設けられている。これにより、回転板を回転操作しつつ、この回転板をその回転軸の直交方向に弾性変位させることで、その位置状態に応じて上記フリー状態と上記ロック状態との切り換えが実現される。したがって、例えば回転板の回転軸方向に沿った操作(ねじり操作等)に応じて上記フリー状態と上記ロック状態との切り換えが行われる場合とは異なり、チューブ状部材の先端付近を所望の湾曲状態で保持させる作業が、片方の手による操作で済むようになる。また、第1および第2の回転部材のうちの一方(第2の回転部材)のみが上記弾性変位をすることから、それらの双方が上記弾性変位をする場合と比べ、上記フリー状態および上記ロック状態のうちのいずれの状態に現在設定されているのかが、判別し易くなる。具体的には、第1の回転部材と第2の回転部材との間の相対的な位置関係(相対位置状態)に応じて、第2の回転部材が弾性変位をしているのか否か、つまり上記フリー状態および上記ロック状態のいずれの状態であるのかが、操作者が把持した状態でも判別が容易となる。
In the medical device handle and the medical device of the present invention, the rotating plate is configured such that at least a part thereof can be elastically displaced along the orthogonal direction of the rotation axis, and the position state of the rotating plate along the orthogonal direction of the rotation axis Accordingly, a switching mechanism is provided for switching between the free state and the locked state. As a result, while the rotary plate is being rotated, the rotary plate is elastically displaced in the direction orthogonal to the rotation axis, thereby switching between the free state and the locked state according to the position state. Therefore, unlike the case where switching between the free state and the locked state is performed according to, for example, an operation along the rotation axis direction of the rotating plate (twisting operation, etc.), the vicinity of the distal end of the tubular member is in a desired curved state. The work to be held in can be done with one hand. Further, since only one of the first and second rotating members (second rotating member) undergoes the elastic displacement, the free state and the lock are compared with the case where both of them undergo the elastic displacement. It becomes easy to determine which of the states is currently set. Specifically, according to the relative positional relationship (relative position state) between the first rotating member and the second rotating member, whether or not the second rotating member is elastically displaced, That is, it is easy to determine whether the state is the free state or the locked state even when the operator holds the state.
ここで、上記第2の回転部材を、例えば、回転軸の直交方向に沿って並んで配置されると共に少なくとも一方に第2の切換部材が設けられた一対の分割部材により構成し、これら一対の分割部材のうちの少なくとも第2の切換部材が設けられている分割部材において、上記回転軸の直交方向に沿って上記弾性変位が可能となるようにするのが望ましい。このようにした場合、回転操作の際に操作者が回転板(第2の回転部材)を把持する方向(指で力を加える方向)と、上記弾性変位の方向(切換操作の際に指で押圧する方向)とが一致することになるため、余計な方向に力を加える必要がなくなり、操作性がより向上する。 Here, for example, the second rotating member is configured by a pair of divided members that are arranged side by side along the orthogonal direction of the rotation axis and at least one of which is provided with the second switching member. In the divided member provided with at least the second switching member among the divided members, it is desirable that the elastic displacement can be performed along a direction orthogonal to the rotation axis. In this case, the direction in which the operator grips the rotating plate (second rotating member) during the rotation operation (direction in which a force is applied with the finger) and the direction of the elastic displacement (with the finger during the switching operation). Therefore, it is not necessary to apply a force in an extra direction, and the operability is further improved.
この場合において、一対の分割部材の各々に第2の切換部材を設けるようにするのが望ましい。このようにした場合、一対の分割部材の一方にのみ第2の切換部材が設けられている場合と比べ、上記ロック状態での強度(ロック強度)が強まるため、切換操作時の製品の信頼性が向上する。この場合において更に、例えば、各分割部材同士が離隔配置された非押圧状態では、第2のハンドル部材における第1の切換部材と各分割部材における第2の切換部材とが互いに係合して上記ロック状態となる一方、各分割部材が互いの間隙方向に沿って押圧されて上記弾性変位がなされている押圧状態では、第2のハンドル部材における第1の切換部材と各分割部材における第2の切換部材とが互いに非係合となって上記フリー状態となるようにしてもよい。つまり、上記非押圧状態では上記ロック状態になると共に、上記押圧状態では上記フリー状態になるようにしてもよい。このようにした場合、上記フリー状態と上記ロック状態との切り換えが簡易な操作で実現されるため、操作性が更に向上する。また、逆に、上記非押圧状態では上記フリー状態になると共に上記押圧状態では上記ロック状態になるようにした場合と比べ、チューブ状部材の先端付近を所望の湾曲状態に保持させる作業での操作性がより向上する。 In this case, it is desirable to provide the second switching member in each of the pair of split members. In this case, since the strength in the locked state (lock strength) is increased as compared with the case where the second switching member is provided only in one of the pair of split members, the reliability of the product during the switching operation is increased. Will improve. In this case, further, for example, in a non-pressed state in which the divided members are spaced apart from each other, the first switching member in the second handle member and the second switching member in each divided member are engaged with each other. On the other hand, in the pressed state in which each divided member is pressed along the gap direction between each other and the elastic displacement is made, the first switching member in the second handle member and the second in each divided member are brought into the locked state. The switching members may be disengaged from each other to enter the free state. That is, the locked state may be set in the non-pressed state, and the free state may be set in the pressed state. In this case, since the switching between the free state and the locked state is realized by a simple operation, the operability is further improved. Conversely, compared with the case where the non-pressed state is the free state and the pressed state is the locked state, the operation in the operation of holding the vicinity of the distal end of the tubular member in a desired curved state. More improved.
本発明の医療機器用ハンドルおよび医療機器では、上記回転操作部が、分割部材における上記弾性変位を実現するばね部材を有するようにするのが望ましい。このようにした場合、分割部材における上記弾性変位が、簡易な構成で実現可能となる。この場合において、上記ばね部材が、回転軸に沿って延在して第1の回転部材と分割部材とを互いに連結する棒状ばね部材からなると共に、この棒状ばね部材が回転軸の直交方向に沿って部分的に弾性変形することによって、分割部材における上記弾性変位が実現されるようにするのが更に望ましい。このようにした場合、第1の回転部材と分割部材との連結部材としての役割も担保しつつ、更に簡易かつ省スペースな構成で、分割部材における上記弾性変位が実現可能となる。また、回転板内に棒状ばね部材が挿入配置され、回転板だけで弾性変位の機構が完結しているため、そのような弾性変位の機構が回転操作の際の妨げにはならず、操作性の更なる向上が実現する。 In the medical device handle and the medical device according to the present invention, it is preferable that the rotation operation unit includes a spring member that realizes the elastic displacement of the split member. In this case, the elastic displacement in the divided member can be realized with a simple configuration. In this case, the spring member includes a rod-like spring member that extends along the rotation axis and connects the first rotation member and the divided member to each other, and the rod-like spring member extends along a direction orthogonal to the rotation axis. It is further desirable that the elastic displacement of the divided member is realized by partially elastically deforming. In this case, the elastic displacement in the divided member can be realized with a simpler and space-saving configuration while securing the role as the connecting member between the first rotating member and the divided member. In addition, since the rod-shaped spring member is inserted and arranged in the rotating plate and the elastic displacement mechanism is completed only by the rotating plate, such an elastic displacement mechanism does not hinder the rotation operation, and the operability is improved. Further improvement is realized.
本発明の医療機器用ハンドルおよび医療機器では、上記一対の分割部材が、互いに嵌合する滑止形状を有するようにするのが望ましい。このようにした場合、分割部材同士が係合したときに、それらの境界方向に沿った滑動(相互の位置ずれ)が防止され、回転操作の際の誤動作等が回避される。 In the medical device handle and the medical device of the present invention, it is desirable that the pair of divided members have a non-slip shape that fits together. In such a case, when the divided members are engaged with each other, sliding (mutual displacement) along the boundary direction between them is prevented, and malfunction during rotation operation is avoided.
また、上記一対の分割部材では、上記弾性変位の方向に沿って互いに略点対称となる位置に、第2の切換部材を1つずつ配置するのが望ましい。このようにした場合、まず、上記弾性変位の方向(回転軸の直交方向)に沿って第2の切換部材が配置されていることにより、そのような方向を除いた位置に第2の切換部材が配置されている場合と比べ、第1および第2の切換部材間での係合状態がより良好となる。また、互いに略点対称となる位置に第2の切換部材が1つずつ配置されているため、第2の切換部材が各分割部材に複数個ずつ配置されている場合と比べ、第1および第2の切換部材間での係合不良(上記ロック状態に設定できなくなる現象等)が生じにくくなる(望ましくは生じなくなる)。 Further, in the pair of divided members, it is desirable that one second switching member is disposed one by one at positions that are substantially point-symmetric with each other along the direction of the elastic displacement. In this case, first, the second switching member is disposed along the direction of the elastic displacement (the direction orthogonal to the rotation axis), so that the second switching member is located at a position excluding such a direction. Compared with the case where is arranged, the engagement state between the first and second switching members becomes better. In addition, since the second switching members are arranged one by one at positions that are substantially point-symmetric to each other, the first and the second switching members are compared with the case where a plurality of second switching members are arranged on each divided member. The engagement failure between the two switching members (such as a phenomenon that the locked state cannot be set) is less likely to occur (desirably not occur).
更に、上記第1のハンドル部材にも第1の切換部材を設け、第1および第2のハンドル部材を互いに同一形状とするのが望ましい。このようにした場合、第1のハンドル部材における第1の切換部材は実際には使用されないものの、第1および第2のハンドル部材が同一形状になることで、例えば同一の金型を使用した製造が可能となり、製造が容易になると共に製造コストが低減する。 Further, it is desirable that the first handle member is also provided with a first switching member, and the first and second handle members have the same shape. In this case, although the first switching member in the first handle member is not actually used, the first and second handle members have the same shape, for example, manufacture using the same mold. Therefore, the manufacturing becomes easy and the manufacturing cost is reduced.
本発明の医療機器用ハンドルおよび医療機器では、上記第1および第2の切換部材を、例えば互いに嵌合する形状としてもよい(第1の構成例)。また、これら第1および第2の切換部材のうち、一方をリング状部材とすると共に他方を凸状部材としてもよい(第2の構成例)。あるいは、第1および第2の切換部材がそれぞれ、リング状部材であってもよい(第3の構成例)。これら第2および第3の構成例の場合、リング状部材を用いていることから、回転板の回転位置を任意の連続的(非離散的)な位置に設定可能となる。なお、これに対して上記第1の構成例の場合、嵌合する形状に応じたピッチに制限され、回転板の回転位置が離散的な位置に設定されることになる。 In the medical device handle and the medical device of the present invention, the first and second switching members may be shaped to fit each other, for example (first configuration example). One of the first and second switching members may be a ring-shaped member and the other may be a convex member (second configuration example). Alternatively, each of the first and second switching members may be a ring-shaped member (third configuration example). In the case of these second and third configuration examples, since the ring-shaped member is used, the rotational position of the rotating plate can be set to an arbitrary continuous (non-discrete) position. In contrast, in the case of the first configuration example, the pitch is limited according to the shape to be fitted, and the rotational position of the rotating plate is set to a discrete position.
なお、上記チューブ状部材としては、例えば、シースチューブまたはカテーテルチューブなどが挙げられる。換言すると、本発明が適用される医療機器としては、例えば、シースイントロデューサまたは各種のカテーテル(電極カテーテル等)などが挙げられる。 Examples of the tubular member include a sheath tube and a catheter tube. In other words, examples of the medical device to which the present invention is applied include a sheath introducer or various catheters (electrode catheter or the like).
本発明の医療機器用ハンドルおよび医療機器によれば、上記した構成の回転板および切換機構を設けるようにしたので、チューブ状部材の先端付近を所望の湾曲状態で保持させる作業を、片方の手による操作で実現することができる。よって、作業効率を改善し、操作性を向上させることが可能となる。 According to the medical device handle and the medical device of the present invention, since the rotating plate and the switching mechanism having the above-described configuration are provided, the operation of holding the vicinity of the distal end of the tubular member in a desired curved state is performed with one hand. Can be realized by the operation. Therefore, it is possible to improve work efficiency and improve operability.
以下、本発明の実施の形態について、図面を参照して詳細に説明する。なお、説明は以下の順序で行う。
1.実施の形態(医療機器がシースイントロデューサである場合の例)
2.変形例
変形例1(第1,第2の切換部材の形状が逆の組合せである場合の例)
変形例2(第1,第2の切換部材がそれぞれリング状部材である場合の例)
変形例3,4(第1,第2の切換部材がリング状部材と凸状部材との組合せである場合の例)
変形例5(医療機器が電極カテーテルである場合の例)
3.その他の変形例
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. The description will be given in the following order.
1. Embodiment (example when medical device is sheath introducer)
2. Modified example Modified example 1 (example in which the shapes of the first and second switching members are opposite combinations)
Modification 2 (example in which each of the first and second switching members is a ring-shaped member)
Modification 5 (example when the medical device is an electrode catheter)
3. Other variations
<実施の形態>
[構成]
図1は、本発明の一実施の形態に係る医療機器としてのシースイントロデューサ1の概略構成例を模式的に表したものである。シースイントロデューサ1は、電極カテーテル等におけるカテーテルチューブ6を患者の体内に挿入する際に、これに先行してシースチューブ2を体内に導入されることで、血管内にカテーテルチューブ6が挿通される通路を確保するための装置である。このシースイントロデューサ1は、シース本体(長尺部分)としてのシースチューブ2(シースシャフト)と、このシースチューブ2の基端側に装着されたハンドル3とを備えている。
<Embodiment>
[Constitution]
FIG. 1 schematically shows a schematic configuration example of a
(シースチューブ2)
シースチューブ2は、可撓性を有する管状構造(中空のチューブ状部材)からなり、自身の軸方向(Z軸方向)に沿って延伸する形状となっている。具体的には、シースチューブ2の軸方向の長さは、ハンドル3の軸方向(Z軸方向)の長さと比べて数倍〜数十倍程度に長くなっている。なお、このシースチューブ2は、その軸方向に向かって同じ特性のチューブで構成されていてもよいが、比較的可撓性に優れた先端部分と、この先端部分に対して軸方向に一体に形成されると共に先端部分よりも比較的に剛性のある基端部分とを有するようにするのが好ましい。
(Sheath tube 2)
The
シースチューブ2内には、例えば図1に示したように、カテーテルチューブ6を挿通することができるようになっている。また、シースチューブ2の先端側には、後述する操作用ワイヤ41a,41b(図1中に図示せず)における各先端が固定されている。そして、操作用ワイヤ41a,41bの各基端側は、シースチューブ2内からハンドル3内(後述する回転板32上)へ延伸されるようになっている。
A
シースチューブ2は、例えば、ポリオレフィン、ポリアミド、ポリエーテルポリアミド、ポリウレタン等の合成樹脂により構成されている。シースチューブ2の軸方向の長さは、約500〜800mm程度であり、そのうちの先端付近の可撓性部分の長さは、約20〜150mm程度である。また、シースチューブ2の外径(X−Y断面の外径)は、約2.0〜5.0mm程度(好ましくは、約2.6〜4.3mm程度)であり、シースチューブ2の内径(X−Y断面の内径)は、約1.6〜4.3mm程度(好ましくは、約2.0〜2.8mm程度)である。
The
なお、カテーテルチューブ6の先端付近には、例えば図1に示したように、複数の電極(ここでは、3つのリング状電極61および1つの先端電極62)が所定の間隔をおいて配置されている。具体的には、リング状電極61は、カテーテルチューブ6の外周面上に固定配置される一方、先端電極62は、カテーテルチューブ6の最先端に固定配置されている。
In the vicinity of the distal end of the
(ハンドル3)
ハンドル3は、シースイントロデューサ1の使用時に操作者(医師)が掴む(握る)部分である。ハンドル3は、図1に示したように、シースチューブ2の基端側に装着されたハンドル本体31(把持部)と、回転板32を含む回転操作部とを有している。回転板32は、ハンドル本体31に対して、その長手方向(Z軸方向)に垂直な回転軸(Y軸方向)を中心として回転自在に装着された部材である。この回転操作部は、後述するように、シースチューブ2の先端付近を撓ませる(偏向させる)操作(回転操作)の際に用いられる部分である。
(Handle 3)
The
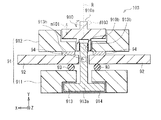
図2は、ハンドル3の詳細構成例を分解斜視図で表したものであり、図2中に示したRは回転板32の回転軸を表している。また、図3は、図1に示したハンドル3におけるII−II線に沿った矢視断面構成例を表したものである。なお、この図3では、符号P1で示した破線内の部分の拡大断面図を併せて示している。
FIG. 2 is an exploded perspective view showing a detailed configuration example of the
ハンドル本体31は、図2および図3に示したように、回転板32の回転軸R(Y軸方向)に沿って互いに対向するハンドル部材311(第1のハンドル部材)およびハンドル部材312(第2のハンドル部材)により構成されている。これらのハンドル部材311,312はそれぞれ、ハンドル本体31の軸方向(Z軸方向)に沿って延在しており、それらの間に回転板32を挟み込むようになっている。このハンドル本体31の軸方向の長さは、操作者が片手で把持できる程度となっているのが好ましいが、特に限定されない。
2 and 3, the handle
ここで図4は、ハンドル部材311,312の平面構成例を表したものである。この図4に示したように、ハンドル部材311,312は互いに同一形状となっている。これらのハンドル部材311,312はそれぞれ、図2〜図4に示したように、それらの中央領域付近(回転軸R付近,回転板32の対向領域付近)に、回転板32へ向けて突出する形状の連結ピン311p,312pを有している。連結ピン311pは、ハンドル部材311と回転板32等(詳細には、回転板32における後述する回転部材321、および中間部材33)とを互いに連結させるための部材である。連結ピン312pは、ハンドル部材312と回転板32等(詳細には、回転板32における後述する回転部材322、および中間部材33)とを互いに連結させるための部材である。なお、これらの連結ピン311p,312pにはそれぞれ、シースチューブ2等をハンドル本体31の軸方向に沿って挿通(延在)させるための案内溝g1が形成されている。
Here, FIG. 4 illustrates a planar configuration example of the
これらのハンドル部材311,312にはそれぞれ、連結ピン311p,312pを中心とする所定の円周に沿って、切換部材Ex1が設けられている。この切換部材Ex1は、後述する切換部材Ex2と嵌合する形状であり、この例では雌ねじ形状となっている。なお、この切換部材Ex1の詳細については、後述する。
The
このようなハンドル本体31(ハンドル部材311,312)は、例えば、ポリカーボネート、アクリロニトリル−ブタジエン−スチレン共重合体(ABS)、アクリル、ポリオレフィン、ポリオキシメチレン等の合成樹脂により構成されている。
Such a handle body 31 (handle
前述した回転操作部は、図2および図3に示したように、回転板32に加え、中間部材33、連結用部材341,342、棒状ばね部材35a,35b等を含んで構成されている。
As shown in FIGS. 2 and 3, the rotation operation unit described above includes an
回転板32は、前述した回転操作の際に操作者が実際に操作を行う部分に相当し、略円盤状の形状からなる。具体的には、この例では図1中の矢印d1a,d1bで示したように、ハンドル本体31に対し、回転板32をZ−X平面内で双方向に回転させる操作(回転軸Rを回転中心とした回転操作)が可能となっている。この回転板32は、詳細は後述するが、その回転軸Rの直交方向(Z−X平面内の所定方向)に沿って、一部分が弾性変位可能に構成されている。
The rotating
回転板32に側面には、一対の摘み32a,32bが回転板32と一体的に設けられている。この例では、回転軸Rを中心として、摘み32aと摘み32bとが互いに点対称となる位置に配置されている。これらの摘み32a,32bはそれぞれ、操作者が回転板32を回転操作させる際に、例えば片手の指で操作される(押される)部分に相当する。
A pair of
なお、この例では図1および図2に示したように、摘み32a,32bがそれぞれ球形状ではなく、回転軸Rに沿った厚みを有するU字状となっている。このような形状の摘み32a,32bとすることで、シースイントロデューサ1全体の幅(X軸方向の長さ)を抑えつつ(保持しつつ)、U字状の曲面の曲率を小さくする(曲率半径を大きくする)ことができ、操作時に指へ加わる圧力(痛く感じる度合い)を低減することが可能となっている。
In this example, as shown in FIGS. 1 and 2, the
このような回転板32は、図2および図3に示したように、ハンドル部材311,312の間で回転軸Rに沿って互いに対向配置された、回転部材321(第1の回転部材)および回転部材322(第2の回転部材)により構成されている。これらの回転部材321,322もまた、略円盤状の形状からなる。回転部材321はハンドル部材311側に配置されており、回転部材322はハンドル部材312側に配置されている。この例では、これら回転部材321,322のうち、回転部材322のみが上記した弾性変位可能に構成されている。また、後述するように、これらの回転部材321,322同士は連結され、互いに一体として回転するようになっている。なお、このような回転板32(回転部材311,312)は、例えば前述したハンドル本体31(ハンドル部材311,312)と同様の材料(合成樹脂等)により構成されている。
As shown in FIGS. 2 and 3, the rotating
ここで、回転部材321の側面には、図2および図3に示したように、上記した一対の摘み32a,32bの各一部分である、一対の摘み321a,321bが設けられている。また、回転部材321の中心付近には、図2に示したように、前述した連結ピン311pが貫通する孔321h(貫通孔)が形成されている。回転部材321は、この連結ピン311pによってハンドル本体31(ハンドル部材311)に固定されており、連結ピン311pを軸として回転することが可能となっている。更に、この回転部材321における回転部材322側の面上には、図2に示したように、一対の調整用留め具321pa,321pbが設けられている。
Here, as shown in FIGS. 2 and 3, a pair of
これらの調整用留め具321pa,321pbはそれぞれ、前述した操作用ワイヤ41a,41bの各基端を、ねじ止め等により個別に固定するための部材(ワイヤ留め具)である。具体的には、図2に示したように、操作用ワイヤ41aは、後述する中間部材33における摘み321a側の案内路g32を経由したうえで、その基端が調整用留め具321paに固定されている。一方、操作用ワイヤ41bは、中間部材33における摘み321b側の案内路g32を経由したうえで、その基端が調整用留め具321pbに固定されている。また、これらの調整用留め具321pa,321pbではそれぞれ、操作用ワイヤ41a,41bの各基端を固定する際のその基端付近の引き込み長を、任意に調整することが可能となっている。
These adjustment fasteners 321pa and 321pb are members (wire fasteners) for individually fixing the base ends of the
これらの操作用ワイヤ41a,41bはそれぞれ、例えばステンレス鋼(SUS)、ニッケルチタン(NiTi)等の超弾性金属材料により構成されており、それらの径は約100〜500μm程度(例えば200μm)である。ただし、必ずしも金属材料で構成されていなくともよく、例えば高強度の非導電性ワイヤ等で構成されていてもよい。
Each of these
一方、回転部材322の側面にも、図2および図3に示したように、上記した一対の摘み32a,32bの各一部分である、一対の摘み322a,322bが設けられている。つまり、図3に示したように、回転部材321における摘み321aと回転部材322における摘み322aとによって、回転板32における摘み32aが構成されている。同様に、回転部材321における摘み321bと回転部材322における摘み322bとによって、回転板32における摘み32bが構成されている。また、回転部材322の中心付近にも、図2に示したように、前述した連結ピン312pが貫通する孔322h(貫通孔)が形成されている。
On the other hand, as shown in FIGS. 2 and 3, a pair of knobs 322a and 322b, which are parts of the pair of
図5は、このような回転部材322の平面構成例を表したものである。なお、この図5では、符号P2で示した破線内の部分の拡大平面図を併せて示している。図2および図5に示したように、回転部材322は、回転軸Rの直交方向(Z−X平面内の所定方向:例えばX軸方向)に沿って並んで配置された、一対の分割部材322d1,322d2により構成されている。分割部材322d1は摘み322b側に配置され、分割部材322d2は摘み322a側に配置されている。これらの分割部材322d1,322d2はそれぞれ、略半円盤状の形状からなる。
FIG. 5 shows a planar configuration example of such a rotating
ここで、各分割部材322d1,322d2では、回転軸Rの直交方向(Z−X平面内の所定方向)に沿って、前述した弾性変位が可能となっている(図2,図5に示した符号m1,m2を参照)。このような弾性変位は、図2および図5に符号Fa,Fbで示したように、各分割部材322d1,322d2に対する、それらの間隙方向への押圧の有無および大きさに応じてなされるようになっている。また、これらの分割部材322d1,322d2はそれぞれ、互いに嵌合する滑止形状S1,S2を有している。具体的には、この例では、半円状の凸部とそれに嵌合する形状の凹部との組合せによって、滑止形状S1,S2がそれぞれ構成されている。 Here, in each of the divided members 322d1 and 322d2, the above-described elastic displacement is possible along the orthogonal direction of the rotation axis R (a predetermined direction in the ZX plane) (shown in FIGS. 2 and 5). (See symbols m1 and m2). Such elastic displacement is made in accordance with the presence / absence and magnitude of the pressing in the gap direction with respect to each of the divided members 322d1 and 322d2, as indicated by reference numerals Fa and Fb in FIGS. It has become. Moreover, these division members 322d1 and 322d2 have anti-slip shapes S1 and S2 that fit each other. Specifically, in this example, the non-slip shapes S1 and S2 are configured by a combination of a semicircular convex portion and a concave portion fitted to the semicircular convex portion, respectively.
このような回転部材322には、孔322h付近を中心とする所定の円周に沿って、切換部材Ex2が設けられている。具体的には、一対の分割部材322d1,322d2では、孔322h付近を中心として互いに略点対称となる位置に(この例ではX軸方向に沿って)、切換部材Ex2が1つずつ配置されている。このような切換部材Ex2は、前述した切換部材Ex1と嵌合する形状であり、この例では雄ねじ形状となっている。
In such a rotating
ここで本実施の形態のハンドル3では、前述したハンドル部材312に設けられた切換部材Ex1(第1の切換部材)と、上記した回転部材322(一対の分割部材322d1,322d2)に設けられた切換部材Ex2(第2の切換部材)とによって、以下の切換機構が構成されている。この切換機構は、「ロック状態」と「フリー状態(ロック解除状態)」との間の切り換えを行う際に用いられる機構である。ここで、「フリー状態」とは、回転板32(この例では回転部材322)における回転軸Rの直交方向(Z−X平面内の所定方向)に沿った位置状態に応じて、回転板32の回転操作が可能となってこの回転板32の回転位置が任意に設定される状態のことを意味している。一方、「ロック状態」とは、このような回転操作が不能となって、回転板32の回転位置が固定化される状態のことを意味している。なお、このような切換機構(切換部材Ex1,Ex2)によるロック状態とフリー状態との切り換え作用の詳細については、後述する。
Here, in the
中間部材33は、図2および図3に示したように、回転部材321,322の間に配置されており、これら回転部材321,322間のスペーサとして機能する部材である。この中間部材33は、ハンドル3の軸方向(Z軸方向)に沿って延在する直線状に形成されると共にシースチューブ2等が挿通される案内路g31と、前述した操作用ワイヤ41a,41bの各経路を規定する円弧状の一対の案内路g32とを有している。これらの案内路g31,g32同士は、図2および図3に示したように、基本的には隔壁によって隔てられている。また、中間部材33は、回転板32(回転部材321,322)とは異なり、ハンドル本体31に対して回転不能に固定されている。なお、中間部材33は、例えば、フッ素樹脂、ポリオレフィン、ポリオキシメチレン等の合成樹脂からなる。
As shown in FIGS. 2 and 3, the
このような構成の中間部材33が設けられていることにより、回転部材321,322の間に、長尺部品(シースチューブ2等)の挿通空間(案内路g31により形成される空間)を確保することが可能となっている。また、中間部材33に形成された案内路g31と、ハンドル本体311,312における連結ピン311p,312pに形成された案内溝g1とによって、そのような長尺部品の延在方向が規定される。これにより、この長尺部品をハンドル本体31の長手方向(Z軸方向)の中心軸に沿って(直線状に)延在させることが可能となっている。なお、これらの中間部材33および連結ピン311p,312pはそれぞれ、ハンドル本体31に対して回転不能に固定されているため、回転板32を回転させても、中間部材33および連結ピン311p,312pにより規定されている長尺部品の延在方向が変化することはない。
By providing the
連結用部材341,342は、図2に示したように、ハンドル部材311,312の先端側および基端側に装着されることで、これらハンドル部材311,312同士を連結する部材(封止用部材)である。これにより、ハンドル部材311,312の間に回転板32(回転部材311,312)および中間部材33が挟み込まれた状態でハンドル本体31が固定され、図1および図3に示したハンドル3全体が構成されることになる。なお、これらの連結用部材341,342には、シースチューブ2や操作用ワイヤ41a,41bが挿通される孔341h,342hが形成されている。なお、このような連結用部材341,342も、例えば前述したハンドル本体31(ハンドル部材311,312)と同様の材料(合成樹脂等)により構成されている。
As shown in FIG. 2, the connecting
棒状ばね部材35a,35bはそれぞれ、回転部材322の各分割部材322d1,322d2における前述した弾性変位(図2,図5中の符号m1,m2参照)を実現するばね部材(弾性部材)である。この棒状ばね部材35a,35bはそれぞれ、図3に示したように、回転軸R(Y軸方向)に沿って延在する棒状部材(例えば細長い円柱状の部材)であり、回転部材321と回転部材322における各分割部材322d1,322d2とを互いに連結する機能も担っている。すなわち、棒状ばね部材35a,35bはそれぞれ、ばね部材であると共に連結部材としても機能するようになっている。具体的には、棒状ばね部材35aは、回転部材321における摘み321aと、分割部材322d2における摘み322aとを互いに連結している。一方、棒状ばね部材35bは、回転部材321における摘み321bと、分割部材322d1における摘み322bとを互いに連結している。
The rod-
このようにして、回転部材321と回転部材322とは、摘み321a,321bの部分において互いに連結されている。これにより回転部材321,322同士は、回転軸Rを中心として、互いに一体として自在に回転することが可能となっている。すなわち、回転部材321と回転部材322とは、別々(個別)に回転することはない。そのため、前述したロック状態では、切換部材Ex2が設けられている回転部材322とともに回転部材321も回転不能となる一方、前述したフリー状態では、回転部材322とともに回転部材321も回転可能となる。
Thus, the rotating
ここで、図3中の拡大断面図に示したように、摘み322aにおける棒状ばね部材35aの周辺(周囲)には、ギャップスペースGs21,Gs22が形成されている。また、摘み321aにおける棒状ばね部材35aの周辺には、ギャップスペースGs11が形成されている。なお、図示はしていないが、摘み321b,322bにおける棒状ばね部材35bの周辺にも、同様のギャップスペースがそれぞれ形成されている。このようなギャップスペースGs11,Gs21,Gs22等が形成されていることで、詳細は後述するが、各分割部材322d1,322d2の回転軸Rの直交方向(Z−X平面内の所定方向)に沿った弾性変位の際に、棒状ばね部材35a,35bがそれぞれ部分的に弾性変形する。すなわち、各摘み321a,321b,322a,322bにおける遊びの部分(ギャップスペースGs11,Gs21,Gs22等)を利用して、棒状ばね部材35a,35bのばね性が担保されている。また、換言すると、棒状ばね部材35a,35bが回転軸Rの直交方向(Z−X平面内の所定方向)に沿って部分的に弾性変形することで、各分割部材322d1,322d2における弾性変位が実現されるようになっている。なお、このような棒状ばね部材35a,35bはそれぞれ、例えば、ニッケル−チタン(Ni−Ti)合金等の形状記憶合金などにより構成されている。
Here, as shown in the enlarged cross-sectional view in FIG. 3, gap spaces Gs21 and Gs22 are formed around (around) the rod-shaped
[作用・効果]
(基本動作)
このシースイントロデューサ1では、不整脈等の検査や治療の際に、電極カテーテル等におけるカテーテルチューブ6に先行して、シースチューブ2が血管を通して患者の体内に挿入される。これにより挿入先の血管内に挿通路が確保され、カテーテルチューブ6の挿入が補助される。
[Action / Effect]
(basic action)
In the
ここで、シースチューブ2の体内への導入方法(操作者による操作方法)としては、例えば以下の方法が挙げられる。
Here, examples of a method for introducing the
すなわち、まず、シースチューブ2の内孔にダイレータ(図示せず)が挿入され、このダイレータと一体化されたシースチューブ2が患者の血管内に挿入される。そして、操作者による回転板32の回転操作が行われつつ、予め挿入されているガイドワイヤ(図示せず)に沿って、シースチューブ2が目的部位(患部)に向けて移動される。このとき、回転板32の回転操作に応じて、体内に挿入されたシースチューブ2の先端付近の形状が、両方向に変化する。
That is, first, a dilator (not shown) is inserted into the inner hole of the
具体的には、例えば、操作者がハンドル3を片手で掴み、その片手の指で摘み32aを操作することにより、回転板32を図1中の矢印d1a方向(右回り)に回転させた場合、以下のようになる。すなわち、シースチューブ2内で、操作用ワイヤ41aが基端側(調整用留め具321pa側)へ引っ張られる。すると、このシースチューブ2の先端付近が、図1中の矢印d2aで示した方向に沿って湾曲する(撓む)。
Specifically, for example, when the operator grasps the
また、例えば、操作者が摘み32bを操作することにより、回転板32を図1中の矢印d1b方向(左回り)に回転させた場合、以下のようになる。すなわち、シースチューブ2内で、操作用ワイヤ41bが基端側(調整用留め具321pb側)へ引っ張られる。すると、このシースチューブ2の先端付近が、図1中の矢印d2bで示した方向に沿って湾曲する。
Further, for example, when the
このように、操作者が回転板32を回転操作することにより、シースチューブ2の首振り偏向動作を行うことができる。なお、ハンドル本体31を軸回りに(図1中のXY平面内で)回転させることで、シースチューブ2が患者の体内に挿入された状態のまま、シースチューブ2の先端付近の湾曲方向の向きを自由に設定することができる。
As described above, the operator can perform the swing deflection operation of the
続いて、シースチューブ2の先端開口が目的部位(患部)の近傍に到達した時点で、上記したダイレータおよびガイドワイヤが抜去される。これによりシースチューブ2の先端部分が、患者の体内に留置される。そして、このようにして体内に導入されたシースチューブ2を利用して、カテーテルチューブ6を体内に挿入することができる。
Subsequently, when the distal end opening of the
なお、カテーテルチューブ6の体内への挿入方法としては、例えば以下の方法が挙げられる。
In addition, as a method for inserting the
すなわち、まず、カテーテルチューブ6の先端が、ハンドル3の基端からシースチューブ2の内孔へ挿入される。そして、操作者によるカテーテルの回転板(カテーテルチューブ6の基端側に設けられたハンドル内に配置:図1中に図示せず)の操作が行われつつ、シースチューブ2の内孔に沿ってカテーテルチューブ6が移動される。これにより例えば図1に示したように、シースチューブ2の先端開口から、カテーテルチューブ6の先端付近が延び出される。
That is, first, the distal end of the
続いて、操作者が上述したカテーテルの回転板を回転操作することにより、カテーテルチューブ6の首振り偏向動作を行う。また、必要に応じて、シースイントロデューサ1における回転板32を回転操作することにより、シースチューブ2の首振り偏向動作を行う。これにより、カテーテルチューブ6の先端部(例えば、電極カテーテルにおけるリング状電極61および1つの先端電極62等)の位置が調整され、目的部位(患部)に到達することができる。
Subsequently, the operator swings and deflects the
このようにしてカテーテルチューブ6の先端部が位置決めされた後、カテーテルによる手技(検査や治療等)が行われる。そして、カテーテルによる手技の終了後、カテーテルチューブ6が体内から抜去され、次いで、シースチューブ2が体内から抜去される。以上のようにして、シースイントロデューサ1および電極カテーテル等のカテーテルを用いた、不整脈等の検査や治療が行われる。
After the distal end portion of the
(ハンドル3における作用)
ところで、このようなシースイントロデューサ1では、回転板32を回転操作してシースチューブ2の首振り偏向動作を行っている際に、使用状況によっては、このシースチューブ2の先端付近の湾曲状態を保持しておきたいケースがある。このようなケースにおけるハンドル3の作用について、比較例と比較しつつ詳細に説明する。
(Operation in the handle 3)
By the way, in such a
図6は、比較例に係るシースイントロデューサ101の概略構成を模式図で表したものである。また、図7は、図6に示したシースイントロデューサ101のハンドル103における、III−III線に沿った矢視断面構成例を表したものである。
FIG. 6 is a schematic diagram illustrating a schematic configuration of the
この比較例のシースイントロデューサ101は、シースイントロデューサ1と同様に、カテーテルチューブ6に先行してシースチューブ102を体内に導入することで、カテーテルチューブ6の挿入を補助する装置である。このシースイントロデューサ101は、図6に示したように、シースチューブ102と、このシースチューブ102の基端側に装着されたハンドル103とを備えている。
Similar to the
ハンドル103は、図6および図7に示したように、互いに対向配置された一対のハンドル部材911,912からなるハンドル本体91と、これらハンドル部材911,912の間に配置された回転板92とを備えている。このハンドル103はまた、ハンドル部材911と回転板92との間に配置されたOリング93と、ハンドル部材912と回転板92と間に配置されたワッシャ94とを備えている。ハンドル103は更に、その基部913aが接着剤914によりハンドル部材911に固定されると共に、回転板92の回転軸Rに沿ってこの回転板92を貫通するように配置され、その先端部が雄ねじ部913bとなっている調整ピン913を備えている。この調整ピン913の軸(Y軸方向)上には、シースチューブ102等が挿通される貫通孔913hが形成されている。また、ハンドル103は、この調整ピン913の雄ねじ部913bと螺合する雌ねじ部910bを有すると共にハンドル部材912に対して回転可能に装着された調整摘み910を備えている。なお、この調整摘み910上には、実際に操作者が摘む部分に相当する摘み部910aが設けられている。
As shown in FIGS. 6 and 7, the
このシースイントロデューサ101では、ハンドル103における調整摘み910がハンドル部材912に対して回転操作される(図6,図7中の矢印d103参照)と、以下のようになる。すなわち、調整摘み910が回転操作されることで、調整ピン913における雄ねじ部913bと調整摘み910における雌ねじ部910bとの螺合深さ(ねじ込み深さ)が変化する(図7中の符号m101参照)。そして、このような螺合深さが変化することにより、Oリング93による回転板92への締付力が変化する。具体的には、Oリング93による締付力が大きくなると回転板92の操作は重くなり、締付力が小さくなると回転板92の操作は軽くなる。
In the
このように、シースイントロデューサ101のハンドル103では、ハンドル本体91(ハンドル部材912)に設けられた調整摘み910をねじって回転板92をハンドル本体91に固定することで、回転板92の回転位置(先端付近の湾曲状態)が固定化される(保持される)。ところが、このようなハンドル103では、以下のような問題が生じる。
As described above, in the
すなわち、操作者がこのような作業を行う際には、一方の手で回転板92を所望の回転位置に固定しつつ、もう一方の手でハンドル本体91(ハンドル部材912)上の調整摘み910をねじる必要がある。つまり、このハンドル103の場合、双方の手を使用した操作を要することになる。よって、この比較例では、作業効率が悪くなって、操作性が低下してしまうおそれがある。
That is, when the operator performs such work, the
また、一般に、シースイントロデューサを使用した手技を行う際には、シースチューブの先端付近の形状とカテーテルチューブの先端付近の形状とを同時に調整することで、電極カテーテルの先端付近を最適な位置に配置しようとするケースがある。このようなケースにおいて、上記比較例のシースイントロデューサ101を用いた場合、上記したようにシースチューブ102側の操作(回転操作および回転位置の固定化操作)に双方の手を使用してしまうことから、カテーテルチューブ6側の操作を行うことができないことになる。つまり、この比較例では、シースチューブ102の先端付近の形状とカテーテルチューブ6の先端付近の形状とを同時に調整することができず、この点でも、作業効率が悪化して操作性が低下してしまうおそれがある。
In general, when performing a procedure using a sheath introducer, the shape near the distal end of the sheath tube and the shape near the distal end of the catheter tube are adjusted at the same time, so that the vicinity of the distal end of the electrode catheter is brought to an optimum position. There is a case to try to place. In such a case, when the
これに対して本実施の形態のシースイントロデューサ1のハンドル3では、図1,図2,図5に示したように、回転板32が、その回転軸Rの直交方向(Z−X平面内の所定方向)に沿って一部分が弾性変位可能に構成されている。また、この回転板32における回転軸Rの直交方向に沿った位置状態に応じて、回転板32の回転位置に関する前述したフリー状態とロック状態との切り換えを行う切換機構(この例では、切換部材Ex1,Ex2)が設けられている。
On the other hand, in the
このようにしてハンドル3では、回転板32が回転操作されつつ、この回転板32がその回転軸Rの直交方向に弾性変位することで、その位置状態に応じて上記フリー状態と上記ロック状態との切り換えが実現される。以下、このような切換機構(切換部材Ex1,Ex2)によるロック状態とフリー状態との切り換え作用について詳述する。
In this manner, in the
まず、例えば図8A,図9Aに示したように、操作者の指による摘み322a,322bへの押圧(回転部材322の中心方向への押圧)がなされていない非押圧状態では、以下のようにしてロック状態となる。すなわち、この非押圧状態では、例えば図8Aに示したように、回転部材322における各分割部材322d1,322d1同士が、互いに離隔配置されることになる。このため、ハンドル部材321における切換部材Ex1と、各分割部材322d1,322d2における切換部材Ex2とが、互いに係合(この例では嵌合)する。その結果、回転板32の回転操作が不能となり、この回転板32の回転位置が固定化される状態(ロック状態)となる。
First, as shown in FIGS. 8A and 9A, for example, in a non-pressed state in which the operator's fingers do not press the
なお、このようなロック状態(非押圧状態)では、各分割部材322d1,322d2が弾性変位していないことから、例えば図9Aに示したように、この弾性変位を実現するための棒状ばね部材35a,35bもまた、弾性変形していないことになる。
In such a locked state (non-pressed state), the divided members 322d1 and 322d2 are not elastically displaced. Therefore, as shown in FIG. 9A, for example, a rod-shaped
一方、例えば図8B,図9Bに示したように、操作者の指による摘み322a,322bへの押圧(各分割部材322d1,322d2の間隙方向への押圧:図8B中の符号Fa,Fb参照)がなされている押圧状態では、以下のようにしてフリー状態(ロック解除状態)となる。すなわち、この押圧状態では、例えば図8Bに示したように、回転部材322における分割部材322d1,322d2がそれぞれ、回転軸Rの直交方向(この例ではX軸方向)に沿って弾性変位する(図8B中の符号m1,m2参照)。このため、ハンドル部材321における切換部材Ex1と、各分割部材322d1,322d2における切換部材Ex2とが、互いに非係合(この例では非嵌合)となる。言い換えると、上記したロック状態における、切換部材Ex1,Ex2同士の係合(嵌合)状態が解除される。その結果、回転板32の回転操作が可能となり、この回転板32の回転位置が任意に設定される状態(フリー状態)となる。
On the other hand, for example, as shown in FIG. 8B and FIG. 9B, the operator's fingers press the
なお、このようなフリー状態(押圧状態)では、上記したように、各分割部材322d1,322d2が弾性変位している。したがって、例えば図9Bに示したように、この弾性変位を実現するための棒状ばね部材35a,35bもまた、回転板32の中心方向へ向けて、部分的に(この例では回転部材322側の部分が)弾性変形することになる(図9B中の符号ma参照)。
In such a free state (pressed state), as described above, each of the divided members 322d1 and 322d2 is elastically displaced. Therefore, for example, as shown in FIG. 9B, the rod-
このようにして本実施の形態のハンドル3では、回転板92の回転軸R方向に沿った操作(ねじり操作)に応じて回転板92におけるフリー状態とロック状態との切り換えが行われる上記比較例のハンドル103とは異なり、以下のようになる。すなわち、回転板32(回転部材322における摘み322a,322b)だけを利用して、上記したメカニズムにより、回転板32の回転操作と、回転板32の回転位置に関するロック状態およびフリー状態の間の切換操作との双方が行えるようになる。したがって、ハンドル3ではハンドル103とは異なり、シースチューブ2の先端付近を所望の湾曲状態に設定してその湾曲状態を保持させる作業が、片方の手による操作で済む(簡便に行うことができる)ようになる。その結果、本実施の形態では前述した比較例とは異なり、例えば、シースチューブ2の先端付近の形状とカテーテルチューブ6の先端付近の形状とを同時に調整することも可能となる。
As described above, in the
具体的には、本実施の形態のシースイントロデューサ1では、例えば以下のようにして、上記した回転操作および切換操作が行われる。
Specifically, in the
すなわち、まず、例えば図10Aに示したように、操作者は、ハンドル本体31を握りながら、例えばその手の指で回転板32(回転部材322における分割部材322d1,322d2)の摘み322a,322bを押圧する(図10A中の符号Fa,Fb参照)。これにより、各分割部材322d1,322d2が回転板32の中心方向へ向けて弾性変位し(図10A中の符号m1,m2参照)、前述したメカニズムにて回転板32がフリー状態に設定される。
That is, first, as shown in FIG. 10A, for example, the operator holds the
次いで、操作者は、摘み322a,322bを押圧したまま(フリー状態を維持しつつ)、これら摘み322a,322bを用いて回転板32を回転操作することで(図10A中の矢印d1a参照)、シースチューブ2の先端付近を所望の湾曲状態に設定する(図10A中の矢印d2a参照)。
Next, the operator rotates the
その後、例えば図10Bに示したように、操作者が摘み322a,322bを非押圧状態にすると、各分割部材322d1,322d2が元の位置(互いに離隔された位置)へ向けて弾性変位し(図10A中の符号m1,m2参照)、前述したメカニズムにて回転板32がロック状態に設定される。このようにして、図10Bに示したように、シースチューブ2の先端付近が、所望の湾曲状態のままで保持されることになる。
Thereafter, for example, as shown in FIG. 10B, when the operator puts the
また、本実施の形態のハンドル3では、図2および図5に示したように、回転部材322における分割部材322d1,322d2がそれぞれ、互いに嵌合する滑止形状S1,S2を有している。具体的には、この例では、半円状の凸部とそれに嵌合する形状の凹部との組合せによって、滑止形状S1,S2がそれぞれ構成されている。これにより回転部材322では、例えば図11に示したように、そのような滑止形状S1,S2が設けられていない回転部材322Aの場合と比べ、以下の利点が得られる。すなわち、分割部材322d1,322d2同士が係合(嵌合)したときに、それらの境界方向に沿った滑動(相互の位置ずれ)が防止され、回転板32の回転操作の際の誤動作等が回避される。なお、これに対して図11に示した回転部材322Aの場合、そのような滑止形状S1,S2が設けられていないことから、分割部材322d1,322d2同士が係合(接触)したときに、それらの境界方向に沿った滑動(図11中の符号SL参照)が生じるおそれがある。
Further, in the
更に、このハンドル3では、回転部材322を構成する一対の分割部材322d1,322d2において、各分割部材322d1,322d2の弾性変位の方向(回転軸Rの直交方向)に沿って、孔322h付近を中心として互いに略点対称となる位置に、切換部材Ex2が1つずつ配置されている。
Further, in this
これにより、まず、上記した弾性変位の方向に沿って切換部材Ex2が配置されていることから、そのような方向を除いた位置に第2の切換部材が配置されている場合と比べ、切換部材Ex1,Ex2間での係合(嵌合)状態がより良好となる。具体的には、切換部材Ex2が弾性変位の方向(回転軸Rの直交方向)に沿って配置されているため、切換部材Ex1,Ex2同士での凹凸形状(雄形状および雌形状)の位置が合致し、互いに嵌合し易くなる。また、この場合、弾性変位の際の変位量が最も大きくなることからも、互いに嵌合し易くなると言える。これに対して、切換部材Ex2が弾性変位の方向以外の方向に沿って配置されている場合、切換部材Ex1,Ex2同士での凹凸形状の位置が合致しないため、互いに嵌合しにくくなる。また、この場合、切換部材Ex2における突出方向の長さによっては、分割部材322d1,322d2における弾性変位の方向の外縁部分(側面)が、切換部材Ex2よりも先に切換部材Ex1に当接し、切換部材Ex1、Ex2間での嵌合が不十分になってしまうおそれもある。 Thereby, since the switching member Ex2 is first disposed along the direction of the elastic displacement described above, the switching member is compared with the case where the second switching member is disposed at a position excluding such a direction. The engagement (fitting) state between Ex1 and Ex2 becomes better. Specifically, since the switching member Ex2 is disposed along the direction of elastic displacement (the direction orthogonal to the rotation axis R), the position of the concavo-convex shape (male shape and female shape) between the switching members Ex1 and Ex2 is determined. Match and make it easier to fit together. Further, in this case, it can be said that the amount of displacement at the time of elastic displacement is the largest, so that it can be easily fitted. On the other hand, when the switching member Ex2 is arranged along a direction other than the elastic displacement direction, the positions of the concavo-convex shape between the switching members Ex1 and Ex2 do not match each other, so that it becomes difficult to fit each other. In this case, depending on the length of the switching member Ex2 in the protruding direction, the outer edge portion (side surface) in the elastic displacement direction of the divided members 322d1 and 322d2 comes into contact with the switching member Ex1 before the switching member Ex2, and the switching is performed. There is also a possibility that the fitting between the members Ex1 and Ex2 becomes insufficient.
また、互いに略点対称となる位置に切換部材Ex2が1つずつ配置されているため、例えば図12に示したように、切換部材Ex2が各分割部材322d1,322d2に複数個(この例では2個)ずつ配置されている場合と比べ、以下の利点が得られる。すなわち、切換部材Ex1,Ex2間での係合(嵌合)不良(回転板32をロック状態に設定できなくなる現象等;係合(嵌合)していない状態で平衡してしまうこと)が生じにくくなる(望ましくは生じなくなる)。具体的には、切換部材Ex2が1つずつ配置されているため、押圧状態において切換部材Ex1,Ex2同士での凹凸形状の位置がずれていたとしても、弾性力によってそれらが互いに嵌合する位置に収まり(位置ずれが修復され)、嵌合不良が回避される。これに対して、切換部材Ex2が複数個ずつ配置されている場合には、押圧状態において切換部材Ex1,Ex2同士での凹凸形状の位置がずれていると、そのような弾性力による位置ずれの修復がなされず、嵌合状態が不十分のままで係合してしまうケースが生じ得る。このようなケースでは、何らかの拍子で回転板32が回転してしまう(嵌合不良が生じる)おそれがある。
In addition, since one switching member Ex2 is disposed at positions that are substantially point-symmetric with respect to each other, for example, as shown in FIG. 12, a plurality of switching members Ex2 are provided in each of the divided members 322d1 and 322d2 (in this example, 2). The following advantages can be obtained as compared with the case where each piece is arranged. That is, an engagement (fitting) failure between the switching members Ex1 and Ex2 (a phenomenon that the
以上のように本実施の形態では、回転軸Rの直交方向に沿って一部分が弾性変位可能に構成された回転板32を設けると共に、この回転板32における回転軸Rの直交方向に沿った位置状態に応じて回転板32のフリー状態とロック状態との切り換えを行う切換機構(切換部材Ex1,Ex2)を設けている。これにより、シースチューブ2の先端付近を所望の湾曲状態で保持させる作業を、片方の手による操作で実現することができる。よって、作業効率を改善し、操作性を向上させることが可能となる。
As described above, in the present embodiment, a rotating
また、片方の手による操作で実現することができることから、前述した比較例とは異なり、シースチューブ2の先端付近を所望の湾曲状態で保持させる作業の際に、例えば以下のような誤操作も防止することが可能となる。すなわち、比較例の場合、片方の手で調整摘み910をねじっているときに、もう片方の手で保持している回転板92の回転位置が、手ぶれ等で微妙に変動してしまうおそれがある(誤操作が生じてしまうおそれがある)。これに対して本実施の形態では、上記したように、このときの作業が片方の手による操作で完結しているため、そのような誤操作の発生が回避されることになる。
Further, since it can be realized by an operation with one hand, unlike the comparative example described above, for example, the following erroneous operation can be prevented during the work of holding the vicinity of the distal end of the
更に、回転板32を一対の回転部材321,322により構成すると共に、これら回転部材321,322のうちの一方(回転部材322)のみが回転軸Rの直交方向に沿って弾性変位をするようにしたので、以下の効果も得られる。すなわち、回転部材321,322の双方がそのような弾性変位をする場合と比べ、上記したフリー状態およびロック状態のうちのいずれの状態に現在設定されているのかが判別し易くなり、操作性(利便性)を向上させることが可能となる。具体的には、回転部材321と回転部材322との間の相対的な位置関係(相対位置状態)に応じて、回転部材322が弾性変位をしているのか否か、つまりフリー状態およびロック状態のいずれの状態であるのかが、操作者が把持した状態でも判別が容易となる。これは、ロック状態では回転部材322が弾性変位することから、回転部材321,322の側面の位置が互いに一致しない(側面の位置が互いにずれている)一方、フリー状態では回転部材322が弾性変位しないため、回転部材321,322の側面の位置が互いに一致することになるからである。
Further, the rotating
加えて、回転部材322を、回転軸Rの直交方向に沿って並んで配置されると共に各々に切換部材Ex2が設けられた一対の分割部材322d1,322d2により構成し、各分割部材322d1,322d2において、回転軸Rの直交方向に沿って弾性変位が可能となるようにしたので、以下の効果も得られる。すなわち、回転操作の際に操作者が回転板32(回転部材322)を把持する方向(指で力を加える方向)と、上記弾性変位の方向(切換操作の際に指で押圧する方向)とが一致する(回転軸Rの直交方向)ことになるため、余計な方向に力を加える必要がなくなり、操作性をより向上させることが可能となる。具体的には、操作者が回転操作をする際には、回転板32を摘み32a,32bの部分で例えば親指と人差し指とで挟んで把持し、常に回転軸Rの直交方向に沿って力を加えながら、この回転板32を回転させる。したがって、その状態で加える力を増加させて摘み322a,322bを押圧するだけで、上記したフリー状態とロック状態との切換操作を行うことができ、スムーズな切換操作を実現することが可能となる。
In addition, the rotating
また、前述した非押圧状態では回転板32がロック状態に設定されると共に、前述した押圧状態では回転板32がフリー状態に設定されるようにしたので、そのようなフリー状態とロック状態との切り換えが簡易な操作で実現され、操作性を更に向上させることが可能となる。また、逆に、非押圧状態ではフリー状態に設定されると共に押圧状態ではロック状態に設定されるようにした場合と比べ、シースチューブ2の先端付近を所望の湾曲状態に保持させる作業での操作性を、より向上させることが可能となる。具体的には、例えばハンドル3を両手持ちで把持しない場合(片手持ちで把持する場合)、シースチューブ2の先端付近の湾曲形状が決定すると、シースイントロデューサ1のハンドル3から手を離した後(摘み32a,32bから指を外した後)に、カテーテルの操作へと移ることになる。したがって、本実施の形態のように、非押圧状態(ハンドル3から手を離した状態)で回転板32がロック状態に設定され、所望の湾曲状態が維持されるようにしたほうが、作業時の操作性が容易になると言える。
In addition, the rotating
更に、ハンドル部材312に加えてハンドル部材311にも切換部材Ex1を設け、これらのハンドル部材311,312を互いに同一形状としたので、以下の効果も得られる。すなわち、ハンドル部材311における切換部材Ex1は実際には使用されないものの、2つのハンドル部材311,312が同一形状となることで、例えば同一の金型を使用した製造が可能となり、製造を容易にすることができると共に製造コストを低減することができる。
Furthermore, since the switching member Ex1 is provided on the
また、本実施の形態では、ハンドル部材311,312内に連結ピン311p,312pおよび切換部材Ex1が形成されているため、前述した比較例のように、それらの機能を担保するための専用の別部材(調整ピン913および調整摘み910)を別途設ける必要がない。したがって、本実施の形態のハンドル3では、比較例のハンドル103と比べて部品点数を削減することができ、製造コストを低減することが可能になると共に、製造(組み立て)の際の作業を簡略化することが可能となる。
In the present embodiment, since the connection pins 311p and 312p and the switching member Ex1 are formed in the
加えて、ハンドル3における回転操作部が、各分割部材322d1,322d2における弾性変位を実現するばね部材を有するようにしたので、各分割部材322d1,322d2における弾性変位を簡易な構成で実現することが可能となる。
In addition, since the rotation operation part in the
また、特に本実施の形態では、このようなばね部材が、回転軸Rに沿って延在して回転部材321と各分割部材322d1,322d2とを互いに連結する棒状ばね部材35a,35bにより構成されている。そして、各棒状ばね部材35a,35bが回転軸Rの直交方向に沿って部分的に弾性変形することによって、各分割部材322d1,322d2における上記弾性変位が実現されるようにしたので、以下の効果も得られる。すなわち、回転部材321と各分割部材322d1,322d2との連結部材としての役割も担保しつつ、更に簡易かつ省スペースな構成で、各分割部材322d1,322d2における上記弾性変位を実現することが可能となる。また、回転板32内に棒状ばね部材35a,35bが挿入配置され、回転板32だけで弾性変位を付与する機構(弾性変位機構)が完結しているため、そのような弾性変位機構が回転操作の際の妨げにはならず、操作性の更なる向上を実現することができる。なお、弾性変位機構を回転板32以外の部分(例えばハンドル本体31)に設けた場合、回転操作によってハンドル本体31と回転板32との相対的な位置関係が変化するため、ばね部材が他の部材に引っかかったりすることになり、回転操作の際の妨げになってしまう。加えて、このような棒状ばね部材35a,35bを用いた場合、例えば棒状部分の材質や太さを調整することで、ばね性を任意に調整(設定)することも可能となる。
Particularly in the present embodiment, such a spring member is constituted by rod-
なお、このようなばね部材として、棒状ばね部材35a,35b以外の他のばね部材(例えば、各分割部材322d1,322d2同士を繋ぐコイルスプリング等)を用いるようにしてもよい。
In addition, you may make it use other spring members (for example, the coil spring etc. which connect each division member 322d1,322d2) other than rod-shaped
<変形例>
続いて、本発明の変形例(変形例1〜5)について説明する。なお、上記実施の形態における構成要素と同一のものには同一の符号を付し、適宜説明を省略する。
<Modification>
Subsequently, modified examples (modified examples 1 to 5) of the present invention will be described. In addition, the same code | symbol is attached | subjected to the same thing as the component in the said embodiment, and description is abbreviate | omitted suitably.
[変形例1]
図13Aは、変形例1に係るハンドル部材(ハンドル部材311B,312B)の平面構成例を表したものである。また、図13Bは、変形例1に係る回転部材(回転部材322B)の平面構成例を表したものである。
[Modification 1]
FIG. 13A illustrates a planar configuration example of the handle members (handle
図13Aに示したハンドル部材311B,312Bはそれぞれ、上記実施の形態で説明したハンドル部材311,312において、切換部材Ex1の代わりに切換部材Ex1Bを設けたものに対応しており、他の構成は同様となっている。具体的には、この切換部材Ex1Bは、以下説明する切換部材Ex2Bと嵌合する形状であり、この例では雄ねじ形状となっている。
The
一方、図13Bに示した回転部材322Bは、上記実施の形態で説明した回転部材322において、切換部材Ex2の代わりに切換部材Ex2Bを設けたものに対応しており、他の構成は同様となっている。具体的には、この切換部材Ex2Bは、上記した切換部材Ex1Bと嵌合する形状であり、この例では雌ねじ形状となっている。
On the other hand, the rotating
このように本変形例では、切換部材Ex1B,Ex2Bの形状(切換部材Ex1B:雄ねじ形状、切換部材Ex2B:雌ねじ形状)が、上記実施の形態における切換部材Ex1,Ex2の形状(切換部材Ex1:雌ねじ形状、切換部材Ex2:雄ねじ形状)とは逆の組み合わせとなっている。 Thus, in this modification, the shape of the switching members Ex1B, Ex2B (switching member Ex1B: male screw shape, switching member Ex2B: female screw shape) is the shape of the switching members Ex1, Ex2 in the above embodiment (switching member Ex1: female screw). The shape and switching member Ex2: male screw shape) are the opposite combination.
このような構成の本変形例においても、基本的には上記実施の形態と同様の作用により同様の効果を得ることが可能である。 Also in this modified example having such a configuration, basically the same effect can be obtained by the same operation as in the above embodiment.
[変形例2]
図14Aは、変形例2に係るハンドル部材(ハンドル部材311C,312C)の平面構成例を表したものである。また、図14Bは、変形例2に係る回転部材(回転部材322C)の平面構成例を表したものである。
[Modification 2]
FIG. 14A illustrates a planar configuration example of a handle member (handle members 311C and 312C) according to
図14Aに示したハンドル部材311C,312Cはそれぞれ、上記実施の形態で説明したハンドル部材311,312において、切換部材Ex1の代わりに切換部材Ex1Cを設けたものに対応しており、他の構成は同様となっている。具体的には、この切換部材Ex1Cは、連結ピン311p,312p(回転軸R)の周りを周回するリング状部材となっている。
The handle members 311C and 312C shown in FIG. 14A correspond to the
一方、図14Bに示した回転部材322Cは、上記実施の形態で説明した回転部材322において、切換部材Ex2の代わりに切換部材Ex2Cを設けたものに対応しており、他の構成は同様となっている。具体的には、この切換部材Ex2Cは、回転部材322Cにおける孔322h(回転軸R)の周りを周回するリング状部材となっている。
On the other hand, the rotating member 322C shown in FIG. 14B corresponds to the rotating
このように本変形例では、切換部材Ex1C,Ex2Cがそれぞれ、互いに係合(接触)するリング状部材となっている。そして、上記実施の形態で説明した押圧状態のときには、切換部材Ex1C,Ex2C同士が互いに接触し、これらの接触面同士での摩擦(摩擦係数)を利用することで、回転板32におけるロック状態が実現されることになる。なお、このような切換部材Ex1C,Ex2C(リング状部材)はそれぞれ、例えば、シリコンやポリテトラフルオロエチレンなどのフッ素系樹脂等の材料により構成することができる。
As described above, in the present modification, the switching members Ex1C and Ex2C are ring-shaped members that are engaged (contacted) with each other. In the pressed state described in the above embodiment, the switching members Ex1C and Ex2C are in contact with each other, and the friction state (coefficient of friction) between these contact surfaces is used, whereby the locked state of the
このような構成の本変形例においても、基本的には上記実施の形態と同様の作用により同様の効果を得ることが可能である。 Also in this modified example having such a configuration, basically the same effect can be obtained by the same operation as in the above embodiment.
また、特に本変形例では、切換部材Ex1C,Ex2Cとしてリング状部材を用いるようにしたので、回転板32の回転位置を任意の連続的(非離散的)な位置に設定することが可能となる。なお、これに対して、これまでに説明した切換部材Ex1,Ex2や切換部材Ex1B,Ex2Bの場合、回転板32の回転位置が、これらの部材同士で嵌合する形状(これらの例ではねじの形状)に応じたピッチに制限され、回転板32の回転位置が離散的な位置に設定されることになる。
In particular, in the present modification, since the ring-shaped members are used as the switching members Ex1C and Ex2C, the rotational position of the
[変形例3,4]
なお、本発明における「第1の切換部材」および「第2の切換部材」としては、例えば、これまでに説明した、リング状部材と凸状部材(雄ねじ形状の部材等)との組合せであってもよい。
[
The “first switching member” and the “second switching member” in the present invention are, for example, combinations of the ring-shaped member and the convex member (such as a male screw-shaped member) described so far. May be.
すなわち、例えば、ハンドル本体31側の「第1の切換部材」として、凸状部材である切換部材Ex1Bを用いると共に、回転板32側の「第2の切換部材」として、リング状部材である切換部材Ex2Cを用いるようにしてもよい(変形例3)。
That is, for example, the switching member Ex1B that is a convex member is used as the “first switching member” on the
また、例えば、ハンドル本体31側の「第1の切換部材」として、リング状部材である切換部材Ex1Cを用いると共に、回転板32側の「第2の切換部材」として、凸状部材である切換部材Ex2を用いるようにしてもよい(変形例4)。
Further, for example, a switching member Ex1C that is a ring-shaped member is used as the “first switching member” on the handle
このような構成の変形例3,4においても、基本的には上記実施の形態と同様の作用により同様の効果を得ることが可能である。また、これらの変形例3,4では、「第1の切換部材」および「第2の切換部材」のうちの一方にリング状部材を用いていることから、上記変形例2の場合と同様に、回転板32の回転位置を任意の連続的な位置に設定することも可能となる。
Also in the modified examples 3 and 4 having such a configuration, basically the same effect can be obtained by the same operation as in the above-described embodiment. Further, in these modified examples 3 and 4, since a ring-shaped member is used for one of the “first switching member” and the “second switching member”, the same as in the case of the modified example 2 above. The rotational position of the
なお、これら変形例3,4同士を比較した場合、製造上の観点では、回転板32側の「第2の切換部材」にリング状部材を用いていない(リング状部材が、分割部材322d1,322d2の形状に対応して2つの半円状に分割されているわけではない)変形例4のほうが望ましいと言える。このような構成の変形例4では、回転板32側の「第2の切換部材」にリング状部材を用いている(リング状部材が、分割部材322d1,322d2の形状に対応して2つの半円状に分割されている)変形例3と比べ、「第2の切換部材」が製造し易くなるためである。ただし、変形例3,4とも、第1,第2の切換部材の機能面での効果は同等であると言える。
In addition, when these modified examples 3 and 4 are compared with each other, in terms of manufacturing, a ring-shaped member is not used for the “second switching member” on the
[変形例5]
(構成)
図15は、変形例5に係る医療機器としての電極カテーテル5の概略構成例を模式的に表したものである。電極カテーテル5は、血管を通して体内(例えば心臓の内部)に挿入され、不整脈の検査や治療等に用いられるものである。この電極カテーテル5は、カテーテル本体(長尺部分)としてのカテーテルチューブ6(カテーテルシャフト)と、このカテーテルチューブ6の基端側に装着されたハンドル3とを備えている。なお、ハンドル3の構成は、基本的は実施の形態で説明したハンドル3と同様のものとなっている。
[Modification 5]
(Constitution)
FIG. 15 schematically illustrates a schematic configuration example of the electrode catheter 5 as a medical device according to the fifth modification. The electrode catheter 5 is inserted into the body (for example, the inside of the heart) through a blood vessel, and is used for arrhythmia examination or treatment. The electrode catheter 5 includes a catheter tube 6 (catheter shaft) as a catheter main body (long portion) and a
カテーテルチューブ6は、シースチューブ2と同様に、可撓性を有する管状構造(中空のチューブ状部材)からなり、自身の軸方向(Z軸方向)に沿って延伸する形状となっている。また、カテーテルチューブ6の先端側には、シースチューブ2の場合と同様に、操作用ワイヤ41a,41bにおける各先端が固定されている。そして、操作用ワイヤ41a,41bの各基端側も、シースチューブ2の場合と同様に、カテーテルチューブ6内から回転板32上へ延伸されるようになっている。なお、このようなカテーテルチューブ6は、例えばシースチューブ2と同様の材料(合成樹脂等)により構成されている。
Similar to the
カテーテルチューブ6はまた、自身の軸方向に沿って延在するように内部に1つのルーメン(細孔,貫通孔)が形成されたいわゆるシングルルーメン構造、あるいは複数(例えば4つ)のルーメンが形成されたいわゆるマルチルーメン構造を有している。なお、カテーテルチューブ6の内部において、シングルルーメン構造からなる領域とマルチルーメン構造からなる領域との双方が設けられていてもよい。このようなカテーテルチューブ6におけるルーメンには、各種の細線(操作用ワイヤ41a,41bや図示しない導線等)がそれぞれ、互いに電気的に絶縁された状態で挿通されている。
The
また、カテーテルチューブ6の先端付近には、複数の電極(ここでは、3つのリング状電極61および1つの先端電極62)が所定の間隔をおいて配置されている。具体的には、リング状電極61は、カテーテルチューブ6の外周面上に固定配置される一方、先端電極62は、カテーテルチューブ6の最先端に固定配置されている。これらの電極は、前述したカテーテルチューブ6のルーメン内に挿通された複数の導線(図示せず)を介して、ハンドル3の内部と電気的に接続されるようになっている。なお、このような導線は、例えば銅等の金属材料により構成されていると共に絶縁性の樹脂で被覆されており、その径は約50〜200μm程度(例えば100μm)である。
In addition, a plurality of electrodes (here, three ring-shaped
これらのリング状電極61および先端電極62はそれぞれ、例えば、アルミニウム(Al)、銅(Cu)、SUS、金(Au)、白金(Pt)等の、電気伝導性の良好な金属材料により構成されている。なお、電極カテーテル5の使用時におけるX線に対する造影性を良好にするためには、白金またはその合金により構成されていることが好ましい。また、これらのリング状電極61および先端電極62の外径は、特には限定されないが、上記したカテーテルチューブ6の外径と同程度であることが望ましい。
Each of the
(作用・効果)
この電極カテーテル5では、不整脈等の検査や治療の際に、カテーテルチューブ6が血管を通して患者の体内に挿入される。このとき、操作者による回転板32の回転操作に応じて、体内に挿入されたカテーテルチューブ6の先端付近の形状が、両方向に変化する。
(Action / Effect)
In this electrode catheter 5, the
具体的には、例えば、操作者がハンドル3を片手で掴み、その片手の指で摘み32aを操作することにより、回転板32を図15中の矢印d1a方向(右回り)に回転させた場合、以下のようになる。すなわち、カテーテルチューブ6内で、操作用ワイヤ41aが基端側(調整用留め具321pa側)へ引っ張られる。すると、このカテーテルチューブ6の先端付近が、図15中の矢印d2aで示した方向に沿って湾曲する(撓む)。
Specifically, for example, when the operator grips the
また、例えば、操作者が摘み32bを操作することにより、回転板32を図15中の矢印d1b方向(左回り)に回転させた場合、以下のようになる。すなわち、カテーテルチューブ6内で、操作用ワイヤ41bが基端側(調整用留め具321pb側)へ引っ張られる。すると、このカテーテルチューブ6の先端付近が、図15中の矢印d2bで示した方向に沿って湾曲する。
Further, for example, when the
このように、操作者が回転板32を回転操作することにより、カテーテルチューブ6の首振り偏向動作を行うことができる。なお、ハンドル本体31を軸回りに(図15中のXY平面内で)回転させることで、カテーテルチューブ6が患者の体内に挿入された状態のまま、カテーテルチューブ6の先端付近の湾曲方向の向きを自由に設定することができる。
Thus, the operator can perform the swing deflection operation of the
ここで、例えば不整脈等の検査に用いられる場合、患者の体内に挿入されたカテーテルチューブ6の電極(先端電極62やリング状電極61)を用いて、心電位が測定される。そして、この心電位の情報を基に、検査部位における不整脈等の有無や程度に関する検査が行われる。
Here, for example, when used for examination of arrhythmia or the like, the cardiac potential is measured using the electrodes (
一方、例えば不整脈等の治療に用いられる場合、患者の体表に装着された対極板(図示せず)と、患者の体内に挿入された電極カテーテル5の電極との間で、高周波(RF;Radio Frequency)通電がなされる。このような高周波通電によって、治療対象の部位(血管等)が選択的に焼灼(アブレーション)され、不整脈等の経皮的治療がなされる。 On the other hand, when used for the treatment of arrhythmia, for example, a high frequency (RF) between a counter electrode (not shown) mounted on the patient's body surface and the electrode of the electrode catheter 5 inserted in the patient's body. Radio Frequency) is energized. By such high-frequency energization, a site to be treated (blood vessel or the like) is selectively cauterized (ablated), and percutaneous treatment such as arrhythmia is performed.
本変形例においても、基本的には上記実施の形態と同様の作用により同様の効果を得ることが可能である。具体的には、本変形例の電極カテーテル5においても、上記実施の形態と同様の構成のハンドル3を設けるようにしたので、カテーテルチューブ6の先端付近を所望の湾曲状態で保持させる作業を、片方の手による操作で実現することができる。よって、作業効率を改善し、操作性を向上させることが可能となる。
Also in this modified example, basically the same effect can be obtained by the same operation as in the above embodiment. Specifically, since the
なお、本変形例の電極カテーテル5のハンドル3においても、変形例1〜4等で説明した各種部材(ハンドル部材311B,311C,312B,312C、回転部材322A,322B,322C、切換部材Ex1B,Ex1C,Ex2B,Ex2Cなど)を適用してもよい。
In addition, also in the
<その他の変形例>
以上、実施の形態および変形例を挙げて本発明を説明したが、本発明はこれらの実施の形態等に限定されず、種々の変形が可能である。
<Other variations>
While the present invention has been described with reference to the embodiments and modifications, the present invention is not limited to these embodiments and the like, and various modifications can be made.
例えば、上記実施の形態等において説明した各部材の形状や配置位置、材料等は限定されるものではなく、他の形状や配置位置、材料等としてもよい。 For example, the shape, arrangement position, material, and the like of each member described in the above embodiments are not limited, and other shapes, arrangement positions, materials, and the like may be used.
また、上記実施の形態では、チューブ状部材(シースチューブ2またはカテーテルチューブ6)の構成を具体的に挙げて説明したが、必ずしも全ての部材を備える必要はなく、また、他の部材を更に備えていてもよい。具体的には、例えばカテーテルチューブ6の内部に、首振り部材として、撓み方向に変形可能な板バネが設けられているようにしてもよい。また、カテーテルチューブ6における電極の構成(リング状電極61および先端電極62の配置や形状、個数等)は、上記実施の形態等で挙げたものには限られない。
In the above embodiment, the configuration of the tubular member (the
更に、上記実施の形態等では、ハンドル3(ハンドル本体31および回転操作部)の構成についても具体的に挙げて説明したが、必ずしも全ての部材を備える必要はなく、また、他の部材を更に備えていてもよい。具体的には、例えば、中間部材33を場合によっては設けないようにしてもよい。また、切換機構の構成についても、上記実施の形態等で説明したもの(切換部材Ex1,Ex2等)には限られず、他の構成としてもよい。更に、回転板32は、上記実施の形態等で説明したようにその回転軸Rの直交方向に沿って一部分のみが弾性変位可能に構成されている場合には限られず、その少なくとも一部分が弾性変位可能に構成されていればよい。また、上記実施の形態等では、一対の分割部材322d1,322d2の各々に第2の切換部材(切換部材Ex2等)が設けられている場合について説明したが、これには限られず、例えば、一対の分割部材322d1,322d2の一方にのみ第2の切換部材が設けられているようにしてもよい。ただし、上記実施の形態等のように各々に第2の切換部材が設けられている場合、一方にのみ設けられている場合と比べ、ロック状態での強度(ロック強度)が強まるため、切換操作時の製品の信頼性を向上させることが可能となる。
Furthermore, in the above-described embodiment and the like, the configuration of the handle 3 (the
加えて、チューブ状部材(シースチューブ2またはカテーテルチューブ6)における先端付近の形状の態様は、上記実施の形態等で説明したものには限られない。具体的には、上記実施の形態等では、チューブ状部材における先端付近の形状が回転板32の操作に応じて両方向に変化するタイプ(バイディレクションタイプ)の医療機器を例に挙げて説明したが、これには限られない。すなわち、本発明は、例えば、チューブ状部材における先端付近の形状が回転板32の操作に応じて片方向に変化するタイプ(シングルディレクションタイプ)の医療機器にも適用することが可能である。この場合、操作用ワイヤおよび調整用留め具をそれぞれ、1本(1つ)だけ設けることとなる。
In addition, the shape of the shape in the vicinity of the distal end of the tubular member (the
また、本発明に係る医療機器の一具体例としての電極カテーテルは、不整脈等の検査用の電極カテーテル(いわゆるEPカテーテル)、および不整脈等の治療用の電極カテーテル(いわゆるアブレーションカテーテル)のいずれにも適用することが可能である。 The electrode catheter as a specific example of the medical device according to the present invention is any of an electrode catheter for testing arrhythmia (so-called EP catheter) and an electrode catheter for treating arrhythmia (so-called ablation catheter). It is possible to apply.
更に、上記実施の形態等では、本発明に係る医療機器の一具体例として、シースイントロデューサおよび電極カテーテルを挙げて説明したが、これらには限られない。すなわち、本発明に係る医療機器用ハンドルは、例えば、ガイドカテーテル(ガイディングカテーテル)、血管造影用カテーテルおよびマイクロカテーテル等の他の医療機器にも適用することが可能である。 Furthermore, in the said embodiment etc., although the sheath introducer and the electrode catheter were mentioned and demonstrated as a specific example of the medical device which concerns on this invention, it is not restricted to these. That is, the medical device handle according to the present invention can be applied to other medical devices such as a guide catheter (guiding catheter), an angiographic catheter, and a microcatheter.
1…シースイントロデューサ、2…シースチューブ、3…ハンドル、31…ハンドル本体、311,311B,311C,312,312B312C…ハンドル部材、311p,312p…連結ピン、32…回転板、321,322,322A,322B,322C…回転部材、32a,32b,321a,321b,322a,322b…摘み、321h,322h…孔、321pa,321pb…調整用留め具、322d1,322d2…分割部材、33…中間部材、341,342…連結用部材、341h,342h…孔、35a,35b…棒状ばね部材、41a,41b…操作用ワイヤ、5…電極カテーテル、6…カテーテルチューブ、61…リング状電極、62…先端電極、R…回転軸、g1…案内溝、g31,g32…案内路、Ex1,Ex1B,Ex1C,Ex2,Ex2B,Ex2C…切換部材、Gs11,Gs21,Gs22…ギャップスペース、S1,S2…滑止形状。
DESCRIPTION OF
Claims (13)
ハンドル本体と、
前記チューブ状部材の先端付近を撓ませる回転操作の際に用いられる回転操作部と
を備え、
前記回転操作部は、
前記ハンドル本体に対して回転自在に装着されると共に、その回転軸の直交方向に沿って少なくとも一部分が弾性変位可能に構成された回転板と、
前記回転板における前記回転軸の直交方向に沿った位置状態に応じて、前記回転操作が可能となって前記回転板の回転位置が任意に設定されるフリー状態と、前記回転操作が不能となって前記回転板の回転位置が固定化されるロック状態と、の切り換えを行う切換機構と
を有しており、
前記ハンドル本体が、前記回転軸に沿って互いに対向する第1および第2のハンドル部材により構成され、
前記回転板が、前記第1および第2のハンドル部材の間で互いに対向配置され、前記第1のハンドル部材側に位置する第1の回転部材と、前記第2のハンドル部材側に位置すると共に前記弾性変位が可能な第2の回転部材とにより構成され、
前記切換機構が、前記第2のハンドル部材に設けられた第1の切換部材と、前記第2の回転部材に設けられた第2の切換部材とにより構成されている
医療機器用ハンドル。 A handle attached to the proximal end of a flexible tubular member,
The handle body,
A rotation operation unit used in a rotation operation for bending the vicinity of the tip of the tubular member,
The rotation operation unit is
A rotating plate that is rotatably attached to the handle body, and at least a part of which is configured to be elastically displaceable along a direction orthogonal to the rotation axis thereof;
According to the position state along the orthogonal direction of the rotation axis in the rotating plate, the rotating operation is enabled and the rotating position of the rotating plate is arbitrarily set, and the rotating operation is disabled. rotational position of the rotary plate Te has been closed and locked state to be immobilized, and a switching mechanism for switching,
The handle body is constituted by first and second handle members facing each other along the rotation axis;
The rotating plate is disposed opposite to each other between the first and second handle members, and is located on the first handle member side and the second handle member side. A second rotating member capable of elastic displacement;
The medical device handle , wherein the switching mechanism includes a first switching member provided on the second handle member and a second switching member provided on the second rotating member .
前記一対の分割部材のうちの少なくとも前記第2の切換部材が設けられている分割部材では、前記回転軸の直交方向に沿って前記弾性変位が可能となっている
請求項1に記載の医療機器用ハンドル。 The second rotating member is configured by a pair of divided members that are arranged side by side along an orthogonal direction of the rotating shaft and at least one of which is provided with the second switching member,
The medical device according to claim 1 , wherein the elastic member is capable of being displaced along a direction orthogonal to the rotation axis in a split member provided with at least the second switching member of the pair of split members. Handle.
各分割部材同士が離隔配置された非押圧状態では、前記第2のハンドル部材における前記第1の切換部材と各分割部材における前記第2の切換部材とが互いに係合して前記ロック状態となり、
各分割部材が互いの間隙方向に沿って押圧されて前記弾性変位がなされている押圧状態では、前記第2のハンドル部材における前記第1の切換部材と各分割部材における前記第2の切換部材とが互いに非係合となって前記フリー状態となる
請求項2に記載の医療機器用ハンドル。 Each of the pair of split members is provided with the second switching member;
In the non-pressed state in which the divided members are spaced apart from each other, the first switching member in the second handle member and the second switching member in each divided member are engaged with each other to be in the locked state,
In a pressed state in which each divided member is pressed along the gap direction and the elastic displacement is made, the first switching member in the second handle member and the second switching member in each divided member; The medical device handle according to claim 2 , wherein the two are disengaged from each other to enter the free state.
請求項2または請求項3に記載の医療機器用ハンドル。 The rotation operating part, medical instrument handle of claim 2 or claim 3 having the spring member to realize the elastic displacement in the dividing member.
前記棒状ばね部材が前記回転軸の直交方向に沿って部分的に弾性変形することにより、前記分割部材における前記弾性変位が実現される
請求項4に記載の医療機器用ハンドル。 The spring member is a rod-shaped spring member that extends along the rotation axis and connects the first rotation member and the split member to each other;
The handle for a medical device according to claim 4 , wherein the elastic displacement of the split member is realized by the elastic deformation of the rod-shaped spring member partially along a direction orthogonal to the rotation axis.
請求項2ないし請求項5のいずれか1項に記載の医療機器用ハンドル。 The handle for a medical device according to any one of claims 2 to 5 , wherein the pair of split members have a non-slip shape that fits together.
請求項2ないし請求項6のいずれか1項に記載の医療機器用ハンドル。 Wherein the pair of divided members, the a position to be substantially point symmetrical to each other along the direction of the elastic displacement, any one of the second switching member is claims 2 to 6 are arranged one by one A handle for medical equipment as described in 1.
請求項1ないし請求項7のいずれか1項に記載の医療機器用ハンドル。 The first of said first switching member is provided in the handle member, said any one of the first and second handle members are the same shape as going on claims 1 to 7 with each other The medical device handle described.
請求項1ないし請求項8のいずれか1項に記載の医療機器用ハンドル。 It said first and second switching member is a medical device handle according to any one of claims 1 to 8 which is shaped to mate with each other.
請求項1ないし請求項8のいずれか1項に記載の医療機器用ハンドル。 Wherein one of the first and second switching member, one handle for a medical device according to any one of claims 1 to 8 and the other is convex member with a ring-shaped member.
請求項1ないし請求項8のいずれか1項に記載の医療機器用ハンドル。 It said first and second switching member, respectively, medical equipment handle according to one of claims 1 to 8 is ring-shaped member.
請求項1ないし請求項11のいずれか1項に記載の医療機器用ハンドル。 The tubular member, medical device handle according to any one of claims 1 to 1 1 is a sheath tube or catheter tube.
前記チューブ状部材の基端側に装着されると共に、ハンドル本体と、前記チューブ状部材の先端付近を撓ませる回転操作の際に用いられる回転操作部とを有するハンドルと
を備え、
前記回転操作部は、
前記ハンドル本体に対して回転自在に装着されると共に、その回転軸の直交方向に沿って少なくとも一部分が弾性変位可能に構成された回転板と、
前記回転板における前記回転軸の直交方向に沿った位置状態に応じて、前記回転操作が可能となって前記回転板の回転位置が任意に設定されるフリー状態と、前記回転操作が不能となって前記回転板の回転位置が固定化されるロック状態と、の切り換えを行う切換機構と
を有しており、
前記ハンドル本体が、前記回転軸に沿って互いに対向する第1および第2のハンドル部材により構成され、
前記回転板が、前記第1および第2のハンドル部材の間で互いに対向配置され、前記第1のハンドル部材側に位置する第1の回転部材と、前記第2のハンドル部材側に位置すると共に前記弾性変位が可能な第2の回転部材とにより構成され、
前記切換機構が、前記第2のハンドル部材に設けられた第1の切換部材と、前記第2の回転部材に設けられた第2の切換部材とにより構成されている
医療機器。 A tubular member having flexibility;
A handle having a handle main body and a rotation operation unit used in a rotation operation for bending the vicinity of the distal end of the tube-shaped member, the handle being mounted on the proximal end side of the tube-shaped member;
The rotation operation unit is
A rotating plate that is rotatably attached to the handle body, and at least a part of which is configured to be elastically displaceable along a direction orthogonal to the rotation axis thereof;
According to the position state along the orthogonal direction of the rotation axis in the rotating plate, the rotating operation is enabled and the rotating position of the rotating plate is arbitrarily set, and the rotating operation is disabled. rotational position of the rotary plate Te has been closed and locked state to be immobilized, and a switching mechanism for switching,
The handle body is constituted by first and second handle members facing each other along the rotation axis;
The rotating plate is disposed opposite to each other between the first and second handle members, and is located on the first handle member side and the second handle member side. A second rotating member capable of elastic displacement;
The medical device in which the switching mechanism includes a first switching member provided on the second handle member and a second switching member provided on the second rotating member .
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014054700A JP6113682B2 (en) | 2014-03-18 | 2014-03-18 | Medical device handle and medical device |
| PCT/JP2014/077643 WO2015141046A1 (en) | 2014-03-18 | 2014-10-17 | Medical equipment handle and medical equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014054700A JP6113682B2 (en) | 2014-03-18 | 2014-03-18 | Medical device handle and medical device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015173945A JP2015173945A (en) | 2015-10-05 |
| JP2015173945A5 JP2015173945A5 (en) | 2016-05-26 |
| JP6113682B2 true JP6113682B2 (en) | 2017-04-12 |
Family
ID=54144044
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014054700A Active JP6113682B2 (en) | 2014-03-18 | 2014-03-18 | Medical device handle and medical device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6113682B2 (en) |
| WO (1) | WO2015141046A1 (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6634928B2 (en) * | 2016-03-31 | 2020-01-22 | 日本ゼオン株式会社 | Tip movable catheter |
| JP6713808B2 (en) * | 2016-03-31 | 2020-06-24 | 日本ピストンリング株式会社 | Medical equipment |
| JP7114635B2 (en) * | 2018-01-31 | 2022-08-08 | 株式会社カネカ | CATHETER HANDLE AND CATHETER WITH THE SAME |
| CN113573766B (en) * | 2019-04-05 | 2022-10-18 | 日本来富恩株式会社 | Catheter handle and catheter with deflectable tip |
| DE112021006955T5 (en) * | 2021-01-29 | 2023-11-09 | Japan Lifeline Co., Ltd. | CATHETER |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU660444B2 (en) * | 1991-02-15 | 1995-06-29 | Ingemar H. Lundquist | Torquable catheter and method |
| JP3162588U (en) * | 2010-06-25 | 2010-09-09 | 日本ゼオン株式会社 | Tip movable catheter |
| JP5907946B2 (en) * | 2011-03-03 | 2016-04-26 | テルモ株式会社 | Stent delivery system |
| JP5535260B2 (en) * | 2012-03-19 | 2014-07-02 | 日本ライフライン株式会社 | Catheter handle |
-
2014
- 2014-03-18 JP JP2014054700A patent/JP6113682B2/en active Active
- 2014-10-17 WO PCT/JP2014/077643 patent/WO2015141046A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015173945A (en) | 2015-10-05 |
| WO2015141046A1 (en) | 2015-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6113682B2 (en) | Medical device handle and medical device | |
| JP6482337B2 (en) | Medical device handle and medical device | |
| JP2021098094A (en) | Basket for multi-electrode array catheter | |
| RU2594817C2 (en) | Control handle for medical device with multiple tension wires | |
| US5487757A (en) | Multicurve deflectable catheter | |
| WO2019188916A1 (en) | Medical device and treatment method | |
| US5397304A (en) | Shapable handle for steerable electrode catheter | |
| JP5531352B2 (en) | Catheter assembly | |
| KR101657923B1 (en) | Medical instrument | |
| CN111315435B (en) | Steerable devices and systems | |
| JP2009522080A (en) | Vascular guide wire control device | |
| JPH10507678A (en) | Steerable electrode catheter | |
| JPH10137340A (en) | Catheter, multifunctional wire used therefor and manufacture of catheter | |
| JP6772095B2 (en) | Medical device handles and medical devices | |
| JP5201755B2 (en) | Steerable stylet | |
| US9789286B2 (en) | Active catheter device and associated system and method | |
| US20150105721A1 (en) | Steerable medical devices | |
| US20150045696A1 (en) | Steerable dilator | |
| WO2012042709A1 (en) | Catheter | |
| EP3178386B1 (en) | Catheter | |
| WO2018037594A1 (en) | Handle for medical device and medical device | |
| WO2017130438A1 (en) | Catheter | |
| JP5167949B2 (en) | Endoscopic high-frequency treatment instrument | |
| WO2017119151A1 (en) | Catheter and cathter device | |
| JP6219805B2 (en) | Electrode catheter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160404 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160404 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170314 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170315 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6113682 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |