JP6045461B2 - Doll body - Google Patents
Doll body Download PDFInfo
- Publication number
- JP6045461B2 JP6045461B2 JP2013180837A JP2013180837A JP6045461B2 JP 6045461 B2 JP6045461 B2 JP 6045461B2 JP 2013180837 A JP2013180837 A JP 2013180837A JP 2013180837 A JP2013180837 A JP 2013180837A JP 6045461 B2 JP6045461 B2 JP 6045461B2
- Authority
- JP
- Japan
- Prior art keywords
- armor
- sphere
- spheres
- thigh
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Toys (AREA)
Description
本発明は人形体に関する。 The present invention relates to a doll body.
たとえば人間に近似された戦闘用のロボット型の人形体として、防護用武具(アーマー)を装着させたものが知られている。下記特許文献1には、戦士の形態をとるロボットの腕部分に、鎧からなるアーマーを装着させたものが開示されている。また、下記特許文献2には、戦士の形態をとるロボットの下腕部の外側に、アームガードからなるアーマーを装着させたものが開示されている。 For example, as a robot-type doll body for combat similar to a human, a protective armor (armor) is known. Patent Document 1 listed below discloses a robot arm that takes the form of a warrior and an armor made of armor. Further, Patent Document 2 below discloses an armor made of an arm guard on the outside of a lower arm portion of a robot that takes the form of a warrior.
しかし、上記特許文献1、2に開示されたロボットに装着されるアーマーは、いずれもロボットの腕部分あるいは下腕部に単に固定させた構成となっているものである。このため、該アーマーは、ロボットの腕部分あるいは下腕部の動きに追随して動くことができるが、該腕部分あるいは下腕部に対しては定位置を維持するようになっていた。 However, the armor attached to the robot disclosed in Patent Documents 1 and 2 has a configuration in which both are simply fixed to the arm portion or the lower arm portion of the robot. Therefore, the armor can move following the movement of the arm portion or the lower arm portion of the robot, but maintains a fixed position with respect to the arm portion or the lower arm portion.
このため、ロボットの腕部分あるいは下腕部を動かしても、アーマーは、該腕部分あるいは下腕部と全く同じ動きをすることになり、たとえばアーマーの重量感等を感じさせることができず、現実味に乏しかったという不都合を有していた。本発明は、このような事情に鑑みてなされたものであり、簡単な構成にも拘わらず、肢体の動きに応じたアーマーの動きを複雑にし、該アーマーの動きに現実味をもたせるようにした人形体を提供することにある。 For this reason, even if the arm part or lower arm part of the robot is moved, the armor will move in exactly the same way as the arm part or lower arm part. For example, the weight of the armor cannot be felt. It had the inconvenience that it was poor in reality. The present invention has been made in view of such circumstances, and in spite of a simple configuration, the movement of the armor according to the movement of the limbs is complicated, and the movement of the armor is made realistic. To provide a form.
本発明の人形体は、本体に関節機構を介して接続された肢部を有し、前記肢部の前記本体側と異なる側部に、前記側部を被うアーマーが配置され、前記アーマーと前記本体とを回動可能に連結するジョイント部材を有し、前記アーマーと前記肢部とを回動可能に連結する接続パーツを有する。 Doll of the present invention, have a limb which is connected via a Takashi Seki mechanism in the body, the body side different from the side of the limbs, armor covering the sides are arranged, said armor wherein the main body has a joint member for rotatably connected, having a connection part for connecting the armor and the limb rotatably with.
本発明の人形体において、前記ジョイント部材は、球体と、前記球体に接続される軸体と、を有することが好ましい。 In the doll of the present invention, before articles Yointo member has a spherical body, a shaft body connected to the sphere, preferably to have a.
本発明の人形体において、前記ジョイント部材は、2個の球体と、一方の前記球体と他方の前記球体を連結する軸体とを有することが好ましい。 In the doll of the present invention, before articles Yointo member, and two balls, you to have the a shaft member for connecting one of the spheres and the other of said spheres preferred.
本発明の人形体において、前記接続パーツは、2個の球体と、一方の前記球体と他方の前記球体を連結する軸体とを有することが好ましい。
In the doll of the present invention, the connection parts, and two balls, you to have the a shaft member for connecting one of the spheres and the other of said spheres have preferred.
このように構成した人形体によれば、簡単な構成にも拘わらず、肢体の動きに応じたアーマーの動きを複雑にし、該アーマーの動きに現実味をもたせることができる。 According to the doll body configured as described above, despite the simple configuration, the movement of the armor according to the movement of the limbs can be complicated, and the movement of the armor can be made realistic.
以下、添付図面を参照して、本発明を実施するための形態(以下、実施形態)について詳細に説明する。なお、実施形態の説明の全体を通して同じ要素には同じ番号を付している。
(実施形態1)
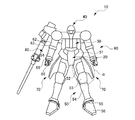
図1は、本発明が適用される人形体の全体を示す外観図である。
図1に示すように、ロボット10は、人間とほぼ同様に、腰部20、胸部30、頭部40、脚部50、腕部60を有し、これらの表面において、ほぼ全域に亘って装甲具を具備した形態を呈したものとなっている。
脚部50は、腰部(本体)20から左右それぞれにおいて、関節機構51を介して接続された大腿部(第1の肢体)52と、この大腿部52と関節機構53を介して接続された下腿部(第2の肢体)54と、この下腿部54と関節機構55を介して接続された足56と、を有して構成されている。
そして、この実施形態1の場合、左右の大腿部52の腰部20側と異なる側部に、該側部を被うアーマー70が配置されている。このアーマー70については、さらに後述する。
DESCRIPTION OF EMBODIMENTS Hereinafter, embodiments for carrying out the present invention (hereinafter referred to as embodiments) will be described in detail with reference to the accompanying drawings. Note that the same number is assigned to the same element throughout the description of the embodiment.
(Embodiment 1)
FIG. 1 is an external view showing an entire doll body to which the present invention is applied.
As shown in FIG. 1, the
The
In the case of the first embodiment, the
また、腕部60においても、左右の肩(本体)から、それぞれ、関節機構(図示せず)を介して接続された一の腕(第1の肢体)62と、この一の腕62と関節機構63を介して接続された二の腕(第2の肢体)64と、この二の腕64と関節機構65を介して接続された手66と、を有して構成されている。
なお、ロボット10は、戦闘に必要となる武器80を、たとえば、前記腕部60の上部、すなわち肩部において装備するように構成されている。
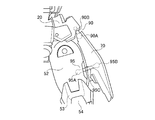
図2は、図1に一点鎖線枠αの部分、すなわち、腰部20と、図中右側の脚部50の大腿部52と、この大腿部52に配置されるアーマー70を拡大して示した図である。
Also in the
The
FIG. 2 is an enlarged view of the portion of the alternate long and short dash line frame α in FIG. 1, that is, the
アーマー70は、腰部20および大腿部52と別体の部材として構成されている。そして、アーマー70は、腰部20との間に、ボールジョイント90を介して回動自在に連結され、大腿部52との間に、回動可能な接続パーツ95を介して連結されている。
ここで、ボールジョイント90は、球体90Aと、この球体90Aに接続される軸体90Bと、を有して構成され、軸体90Bは腰部20に固定され、球体90Aはアーマー70に埋設されて配置されている。これにより、アーマー70は、腰部20に固定された軸体90Bに対し、該軸体90Bと直交するたとえば全ての方向に揺動し得るようになっている。このような趣旨から、ポールジョイント90の軸体90Bはアーマー70に固定され、球体90Aは腰部20に埋設されるような構成にしてもよいことはいうまでもない。
The
Here, the
また、接続パーツ95は、2個の球体95A、95Bと、これら球体95A、95Bを連結する軸体95Cと、を有して構成され、一方の球体95Aは大腿部52に埋設され、他方の球体95Bはアーマー70に埋設されて配置されている。これにより、アーマー70は、大腿部52に対し、該大腿部52の表面に対する垂直方向に若干可動し得るとともに、該垂直方向と直交するたとえば全ての方向に若干可動し得るようになっている。
The
このように構成した場合、アーマー70は、腰部20および大腿部52に対して僅かな変位を有するように可動させることができるようになる。このため、腰部20に対して、脚部50を体の前後方向に揺動する場合、あるいは一方の脚部50から離れる方向に広げる場合において、アーマー70は、全体的に観た場合に脚部50の動きに追随して動くことになるが、その動きにおいて、たとえば脚部50の動きよりも少し遅れてアーマー70が動くというように複雑な動きを生じさせることができる。これにより、アーマー70の重量感等を感じさせることができ、該アーマー70の動きに現実味をもたせるようにできる。
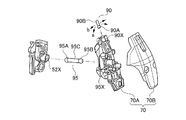
なお、図3は、ボールジョイント90の球体90Aが埋設されるアーマー70内の軸受90Xと、接続パーツ95の一方の球体95Bが埋設されるアーマー70内の軸受95Xと、該接続パーツ95の他方の球体95Aが埋設される大腿部52内の軸受52Xを示した分解図である。
When configured in this manner, the
3 shows a
図3に示すように、アーマー70は、大腿部52側に配置される裏面部材70Aと、該大腿部52と反対側に配置される表面部材70Bと、の結合体で構成されるようになっている。
アーマー70の裏面部材70Aの図中上部(腰部20に近接する部分)には、円筒状の軸受90Xが形成され、ボールジョイント90の球体90Aが該軸受90Xに嵌合されるようになっている。これにより、ボールジョイント90は、該球体90Aを中心として、たとえば図中a方向あるいはb方向に揺動し得るようになっている。なお、ボールジョイント90の球体90Aの軸体90Bはロボット10の腰部20に固定されることは上述した通りである。
As shown in FIG. 3, the
A
アーマー70の裏面部材70Aのほぼ中央には該裏面部材70Aの表面に対して垂直方向に延在する円筒状の軸受95Xが形成され、該軸受95Xに接続パーツ95の一方の球体95Bが嵌合されるようになっている。この場合、該接続パーツ95は、前記一方の球体95Bを中心とて、前記ボールジョイント90と同様な方向に揺動し得るようになっている。
一方の大腿部52内には、該大腿部52に固定されて配置される円筒状の軸受52Xを有し、この軸受52Xに接続パーツ95の他方の球体95Aが嵌合されるようになっている。この場合に、接続パーツ95の一方の球体95Bが前記軸受95Xに嵌合されていない場合において、接続パーツ95は、前記一方の球体95Aを中心として、前記ボールジョイント90と同様な方向に揺動し得るようになっている。
(実施形態2)
A
One
(Embodiment 2)
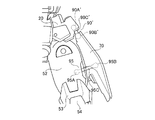
実施形態1では、図2に示すように、アーマー70とロボット10の腰部20との連結は、球体90Aとこの球体90Aに接続される軸体90Bとからなるボールジョイント90を介してなされるようにしたものである。しかし、これに限定されることはなく、図4に示すように、該ボールジョイント90’として、2個の球体90A’、90B’とこれら球体を連結する軸体90C’とを有して構成されるものを用意し、一方の球体90A’は腰部20に埋設され、他方の球体90B’はアーマー70に埋設されるようにしてもよい。
このように構成した場合、アーマー70は腰部20に対して、ボールジョイント90’のほぼ軸方向に若干可動し得るようになり、図2に示した場合よりもアーマー70の複雑な動きを期待することができるようになる。
(実施形態3)
In the first embodiment, as shown in FIG. 2, the
When configured in this way, the
(Embodiment 3)
実施態様1(図2)、実施態様2(図4)は、いずれも、アーマー70は脚部50の大腿部52に配置された構成として説明をした。しかし、これに限定されることはなく、腕部60の一の腕62に配置させた場合にも本発明を適用させることができる。
すなわち、図5に示すように、左右の一の腕62の肩31側と異なる側部に、該側部を被うアーマー70’を配置させ、該アーマー70’は、肩31との間に、ボールジョイント(図2の符号90に相当する)を介して回動自在に連結され、一の腕62との間に、回動可能な接続パーツ(図2の符号95に相当する)を介して連結されるように構成させることができる。
このように構成した場合でも、簡単な構成にも拘わらず、腕の動きに応じたアーマー70’の動きを複雑にし、該アーマー70’の動きに現実味をもたせるようにできる。
In both Embodiment 1 (FIG. 2) and Embodiment 2 (FIG. 4), the
That is, as shown in FIG. 5, an
Even in such a configuration, despite the simple configuration, the movement of the armor 70 'according to the movement of the arm can be complicated, and the movement of the armor 70' can be made realistic.
以上、実施形態を用いて本発明を説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されないことは言うまでもない。上記実施形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。また、その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。 As mentioned above, although this invention was demonstrated using embodiment, it cannot be overemphasized that the technical scope of this invention is not limited to the range as described in the said embodiment. It will be apparent to those skilled in the art that various modifications or improvements can be added to the above-described embodiments. Further, it is apparent from the description of the scope of claims that embodiments with such changes or improvements can also be included in the technical scope of the present invention.
10……ロボット、20……腰部、30……胸部、31……肩、40……頭部、50……脚部、51、53、55……関節機構、52……大腿部、52X……軸受、54……下腿部、56……足、60……腕部、62……一の腕、63、65……関節機構、64……二の腕、66……手、70、70’……アーマー、70A……裏面部材、70B……表面部材、80……武器、90……ボールジョイント、90A……球体、90B……軸体、90X……軸受、90’……ボールジョイント、90A’、90B’……球体、90C’……軸体、95……接続パーツ、95A、95B……球体、95C……軸体、95X……軸受。
10 ... Robot, 20 ... Lumbar, 30 ... Chest, 31 ... Shoulder, 40 ... Head, 50 ... Leg, 51, 53, 55 ... Joint mechanism, 52 ... Thigh, 52X ...... Bearing, 54 …… Lower leg, 56 …… Feet, 60 …… Arm, 62 …… One arm, 63, 65 …… Joint mechanism, 64 …… Second arm, 66 …… Hand, 70,70 '…… Armor, 70A …… Back member, 70B …… Surface member, 80 …… Weapon, 90 …… Ball joint, 90A …… Sphere, 90B …… Shaft, 90X …… Bearing, 90 ′ …… Ball joint , 90A ', 90B' ... sphere, 90C '... shaft, 95 ... connecting parts, 95A, 95B ... sphere, 95C ... shaft, 95X ... bearing.
Claims (4)
前記肢部の前記本体側と異なる側部に、前記側部を被うアーマーが配置され、
前記アーマーと前記本体とを回動可能に連結するジョイント部材を有し、
前記アーマーと前記肢部とを回動可能に連結する接続パーツを有する人形体。 Has a limb which is connected via a Takashi Seki mechanism in the body,
The main body side is different from the side of the limbs, armor covering the side are arranged,
A joint member that rotatably connects the armor and the main body;
Doll body that have a connection part for connecting the armor and the limb rotatably.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013180837A JP6045461B2 (en) | 2013-09-02 | 2013-09-02 | Doll body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013180837A JP6045461B2 (en) | 2013-09-02 | 2013-09-02 | Doll body |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012223648A Division JP5358728B1 (en) | 2012-10-05 | 2012-10-05 | Doll body |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016222107A Division JP6309072B2 (en) | 2016-11-15 | 2016-11-15 | Doll body |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014076279A JP2014076279A (en) | 2014-05-01 |
| JP2014076279A5 JP2014076279A5 (en) | 2015-11-19 |
| JP6045461B2 true JP6045461B2 (en) | 2016-12-14 |
Family
ID=50782123
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013180837A Active JP6045461B2 (en) | 2013-09-02 | 2013-09-02 | Doll body |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6045461B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7069288B1 (en) * | 2020-12-28 | 2022-05-17 | 株式会社バンダイ | Doll body and rotation mechanism |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6076985U (en) * | 1983-10-31 | 1985-05-29 | 株式会社タカラ | Robot toy shoulder cover structure |
| JP3213277B2 (en) * | 1998-04-27 | 2001-10-02 | 株式会社バンダイ | Stick holding doll |
| JP3863502B2 (en) * | 2003-05-19 | 2006-12-27 | 株式会社コナミデジタルエンタテインメント | Deformed toy |
| JP2006262944A (en) * | 2005-03-22 | 2006-10-05 | Masamitsu Shimada | Block toy |
| BR112013009860B1 (en) * | 2010-10-22 | 2020-12-01 | Lego A/S | set for building toy |
-
2013
- 2013-09-02 JP JP2013180837A patent/JP6045461B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014076279A (en) | 2014-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5358728B1 (en) | Doll body | |
| WO2007113949A1 (en) | Doll toy | |
| JP6309072B2 (en) | Doll body | |
| CN114307178B (en) | Human body and rotating mechanism | |
| TWI612994B (en) | Shoulder joint structure | |
| JP7391144B2 (en) | Doll body shoulder joint structure | |
| JP6030615B2 (en) | Doll toy shoulder joint structure and doll toy | |
| JP6045461B2 (en) | Doll body | |
| JP5490854B2 (en) | Doll toy | |
| WO2022249777A1 (en) | Model component and joint structure | |
| JP2019030684A (en) | Doll toy shoulder joint structure and doll toy | |
| CN116688532A (en) | Model toy and joint structure | |
| JP3196196U (en) | doll | |
| CN104161610B (en) | The ankle joint of ectoskeleton buffering power-assisted | |
| HK1205035B (en) | Figurine | |
| JP2022168338A (en) | Doll-type toys and connecting members for models | |
| JP6411429B2 (en) | Doll toy shoulder joint structure and doll toy | |
| CN208387929U (en) | Protect knee-pad | |
| JP4519166B2 (en) | Doll body | |
| JP2023171644A (en) | doll toy | |
| JP2014076279A5 (en) | ||
| TWM518113U (en) | Doll torso skeleton | |
| KR101283243B1 (en) | Arm joint for ball joint doll | |
| CN102441279B (en) | Joint structure of human-shaped toy | |
| JP2014079654A (en) | Joint structure of wrist of doll body, joint structure of ankle of doll body, and doll body |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151002 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151002 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161027 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161028 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161115 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6045461 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |