JP6018662B2 - Counting device, physical quantity sensor, counting method and physical quantity measuring method - Google Patents
Counting device, physical quantity sensor, counting method and physical quantity measuring method Download PDFInfo
- Publication number
- JP6018662B2 JP6018662B2 JP2015071575A JP2015071575A JP6018662B2 JP 6018662 B2 JP6018662 B2 JP 6018662B2 JP 2015071575 A JP2015071575 A JP 2015071575A JP 2015071575 A JP2015071575 A JP 2015071575A JP 6018662 B2 JP6018662 B2 JP 6018662B2
- Authority
- JP
- Japan
- Prior art keywords
- period
- counting
- signal
- representative value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Instruments For Measurement Of Length By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
本発明は、信号の数を数える計数装置、および計数装置を用いて干渉波形の数を測定し測定対象の物理量を求める干渉型の物理量センサに関するものである。 The present invention relates to a counting device that counts the number of signals, and an interference-type physical quantity sensor that measures the number of interference waveforms by using the counting device to obtain a physical quantity to be measured.
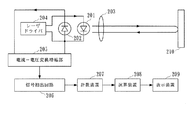
従来より、半導体レーザの自己結合効果を用いた波長変調型のレーザ計測器が提案されている(特許文献1参照)。このレーザ計測器の構成を図32に示す。図32のレーザ計測器は、物体210にレーザ光を放射する半導体レーザ201と、半導体レーザ201の光出力を電気信号に変換するフォトダイオード202と、半導体レーザ201からの光を集光して物体210に照射すると共に、物体210からの戻り光を集光して半導体レーザ201に入射させるレンズ203と、半導体レーザ201に発振波長が連続的に増加する第1の発振期間と発振波長が連続的に減少する第2の発振期間とを交互に繰り返させるレーザドライバ204と、フォトダイオード202の出力電流を電圧に変換して増幅する電流−電圧変換増幅部205と、電流−電圧変換増幅部205の出力電圧を2回微分する信号抽出回路206と、信号抽出回路206の出力電圧に含まれるモードホップパルス(以下、MHPとする)の数を数える計数装置207と、物体210との距離および物体210の速度を算出する演算装置208と、演算装置208の算出結果を表示する表示装置209とを有する。
Conventionally, a wavelength modulation type laser measuring instrument using the self-coupling effect of a semiconductor laser has been proposed (see Patent Document 1). The structure of this laser measuring instrument is shown in FIG. 32 includes a
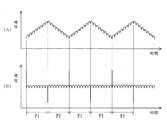
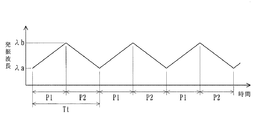
レーザドライバ204は、時間に関して一定の変化率で増減を繰り返す三角波駆動電流を注入電流として半導体レーザ201に供給する。これにより、半導体レーザ201は、発振波長が一定の変化率で連続的に増加する第1の発振期間と発振波長が一定の変化率で連続的に減少する第2の発振期間とを交互に繰り返すように駆動される。図33は、半導体レーザ201の発振波長の時間変化を示す図である。図33において、P1は第1の発振期間、P2は第2の発振期間、λaは各期間における発振波長の最小値、λbは各期間における発振波長の最大値、Ttは三角波の周期である。
The
半導体レーザ201から出射したレーザ光は、レンズ203によって集光され、物体210に入射する。物体210で反射された光は、レンズ203によって集光され、半導体レーザ201に入射する。フォトダイオード202は、半導体レーザ201の光出力を電流に変換する。電流−電圧変換増幅部205は、フォトダイオード202の出力電流を電圧に変換して増幅し、信号抽出回路206は、電流−電圧変換増幅部205の出力電圧を2回微分する。計数装置207は、信号抽出回路206の出力電圧に含まれるMHPの数を第1の発振期間P1と第2の発振期間P2の各々について数える。演算装置208は、半導体レーザ1の最小発振波長λaと最大発振波長λbと第1の発振期間P1におけるMHPの数と第2の発振期間P2におけるMHPの数に基づいて、物体210との距離および物体210の速度を算出する。このような自己結合型のレーザ計測器の技術を利用して、MHPの数を測定すれば、このMHPの数から物体の振動周波数を算出することが可能である。
Laser light emitted from the
以上のようなレーザ計測器では、例えば外乱光などのノイズをMHPとして数えたり、信号の歯抜けのために数えられないMHPがあったりして、計数装置で数えるMHPの数に誤差が生じ、算出した距離や振動周波数等の物理量に誤差が生じるという問題点があった。
そこで、発明者は、計数期間中のMHPの周期を測定し、測定結果から計数期間中の周期の度数分布を作成し、度数分布からMHPの周期の代表値を算出し、度数分布から、代表値の第1の所定数倍以下である階級の度数の総和Nsと、代表値の第2の所定数倍以上である階級の度数の総和Nwとを求め、これらの度数NsとNwに基づいてMHPの計数結果を補正することにより、計数時の欠落や過剰な計数の影響を除去することができる計数装置を提案した(特許文献2参照)。
In the laser measuring instrument as described above, for example, noise such as ambient light is counted as MHP, or there is MHP that cannot be counted due to missing teeth of the signal, and an error occurs in the number of MHPs counted by the counting device, There is a problem that an error occurs in the physical quantity such as the calculated distance and vibration frequency.
Therefore, the inventor measures the period of MHP during the counting period, creates a frequency distribution of the period during the counting period from the measurement result, calculates a representative value of the period of MHP from the frequency distribution, and represents the representative value from the frequency distribution. A total sum Ns of class frequencies that is less than or equal to a first predetermined number of values and a total sum Nw of class frequencies that are greater than or equal to a second predetermined number of values of the representative value are obtained, and based on these frequencies Ns and Nw By correcting the counting result of MHP, a counting device has been proposed that can eliminate the influence of missing or excessive counting during counting (see Patent Document 2).
特許文献2に開示された計数装置によれば、SN(Signal to Noise ratio)が極端に低下しない限り、概ね良好な補正を行うことができる。
しかしながら、特許文献2に開示された計数装置では、短距離測定で信号強度がヒステリシス幅と比較して極端に強い場合、計数装置に入力される信号に2値化のしきい値付近でMHPよりも高周波のノイズによってチャタリングが生じ、短い周期の信号やMHPの本来の周期の半分程度の周期の信号が多発する場合がある。この場合、MHPの本来の周期よりも短い周期が周期の分布の代表値になってしまうので、MHPの計数結果を正しく補正することができず、MHPの計数結果が本来の値よりも例えば数倍大きくなってしまうという問題点があった。
According to the counting device disclosed in
However, in the counting device disclosed in
本発明は、上記課題を解決するためになされたもので、計数装置に入力される信号に高周波のノイズが連続して発生している場合であっても、計数誤差を補正することができる計数装置および計数方法、MHPの計数誤差を補正して物理量の測定精度を向上させることができる物理量センサおよび物理量計測方法を提供することを目的とする。 The present invention has been made in order to solve the above-described problem, and is capable of correcting the counting error even when high-frequency noise is continuously generated in the signal input to the counting device. It is an object of the present invention to provide a physical quantity sensor and a physical quantity measuring method that can improve the measurement accuracy of a physical quantity by correcting the counting error of the apparatus, the counting method, and MHP.
本発明は、特定の物理量と単一の信号の数とが線形の関係を有し、前記特定の物理量が一定の場合は略単一周波数となる前記信号の1周期分の波形を数える計数装置において、一定の計数期間における単一の入力信号の周期を信号が入力される度に測定する信号周期測定手段と、この信号周期測定手段の測定結果から前記計数期間中の入力信号の周期の度数分布を作成する度数分布作成手段と、この度数分布作成手段が作成した度数分布から前記入力信号の周期の分布の代表値を算出する代表値算出手段と、前記信号周期測定手段の測定結果について、前記代表値の0.5倍未満の長さの周期とその直後に測定された周期とを合わせた周期を結合後の周期とし、周期を合わせた信号波形を1つの信号の1周期分の波形とすることを、結合後の周期が前記代表値の0.5倍以上になるまで行う信号結合手段と、前記計数期間における前記信号結合手段の処理後の単一の信号の1周期分の波形を数える信号計数手段と、前記信号結合手段の処理結果から、前記代表値の0.5倍未満である周期の数の総和Nsと、前記代表値の(n+0.5)倍以上(n+1.5)倍未満(nは1以上の自然数)である周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて前記信号計数手段の計数結果を補正する補正値算出手段とを備え、前記度数分布作成手段は、さらに、前記信号結合手段の処理結果から前記計数期間中の入力信号の周期の度数分布を作成し、前記代表値算出手段は、前記度数分布作成手段が前記信号結合手段の処理結果から作成した度数分布から、前記入力信号の周期の代表値を算出して代表値を最新の値に更新し、前記補正値算出手段は、前記代表値算出手段が算出した最新の代表値を用いて前記信号計数手段の計数結果を補正するものであり、前記信号計数手段の計数結果をN、前記代表値をT0、前記単一の信号の周期がとり得る最大値をT max としたとき、補正後の計数結果N’を、

また、本発明の計数装置の1構成例において、前記代表値は、中央値、最頻値、平均値、階級値と度数との積が最大となる階級値のうちのいずれか1つである。
The present invention relates to a counting device for counting a waveform of one period of the signal having a linear relationship between a specific physical quantity and the number of single signals, and having a substantially single frequency when the specific physical quantity is constant. The signal period measuring means for measuring the period of a single input signal in a certain counting period each time a signal is inputted, and the frequency of the input signal in the counting period from the measurement result of the signal period measuring means Frequency distribution creating means for creating a distribution, representative value calculating means for calculating a representative value of the period distribution of the input signal from the frequency distribution created by the frequency distribution creating means, and measurement results of the signal period measuring means, A cycle obtained by combining a cycle having a length less than 0.5 times the representative value and a cycle measured immediately thereafter is defined as a combined cycle, and a signal waveform obtained by combining the cycles is a waveform for one cycle of one signal. And after combining Signal combining means for performing until the period is equal to or greater than 0.5 times the representative value, the signal counting means for counting a period of the waveform of a single signal after processing of said signal coupling means in the counting period, the From the processing result of the signal combining means, the sum Ns of the number of periods that is less than 0.5 times the representative value and (n + 0.5) times or more (n + 1.5) times (n is 1 or more) the representative value. It obtains a total sum Nw n of the number of cycles is a natural number) of a correction value calculating means for correcting the counting result of the signal counting means on the basis of the frequencies Ns and Nw n, the frequency distribution generating means Further, the frequency distribution of the period of the input signal during the counting period is created from the processing result of the signal combining means, and the representative value calculating means is created from the processing result of the signal combining means by the frequency distribution creating means From the frequency distribution, the frequency of the input signal A representative value by calculating the representative value is updated to the latest value of the correction value calculation means corrects the counting result of the signal counting means with the latest representative values said representative value calculation means has calculated When the counting result of the signal counting means is N, the representative value is T0, and the maximum value that can be taken by the period of the single signal is T max , the corrected counting result N ′ is
Further, in one configuration example of the counting device of the present invention, the representative value is any one of a median value, a mode value, an average value, and a class value that maximizes the product of the class value and the frequency. .
また、本発明の物理量センサは、測定対象にレーザ光を放射する半導体レーザと、発振波長が連続的に単調増加する第1の発振期間と発振波長が連続的に単調減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように前記半導体レーザを動作させる発振波長変調手段と、前記半導体レーザから放射されたレーザ光と前記測定対象からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段と、前記干渉波形を計数対象の単一の信号とし、この信号の1周期分の波形を、前記第1の発振期間と前記第2の発振期間の各々を計数期間として数える計数装置と、この計数装置の計数結果から前記測定対象の物理量を求める演算手段とを備えることを特徴とするものである。 The physical quantity sensor of the present invention includes a semiconductor laser that emits laser light to a measurement target, a first oscillation period in which the oscillation wavelength continuously increases monotonously, and a second oscillation period in which the oscillation wavelength continuously decreases monotonously. Oscillation wavelength modulation means for operating the semiconductor laser so that at least one of them repeatedly exists, and an interference waveform generated by a self-coupling effect between the laser light emitted from the semiconductor laser and the return light from the measurement object Detection means for detecting an electrical signal, and the interference waveform as a single signal to be counted, and a waveform of one cycle of this signal, the first oscillation period and the second oscillation period as a counting period And a calculating means for obtaining the physical quantity of the measurement object from the counting result of the counting apparatus.
また、本発明は、特定の物理量と単一の信号の数とが線形の関係を有し、前記特定の物理量が一定の場合は略単一周波数となる前記信号の1周期分の波形を数える計数方法において、一定の計数期間における単一の入力信号の周期を信号が入力される度に測定する信号周期測定手順と、この信号周期測定手順の測定結果から前記計数期間中の入力信号の周期の度数分布を作成する第1の度数分布作成手順と、この第1の度数分布作成手順で作成した度数分布から前記入力信号の周期の分布の代表値を算出する第1の代表値算出手順と、前記信号周期測定手順の測定結果について、前記代表値の0.5倍未満の長さの周期とその直後に測定された周期とを合わせた周期を結合後の周期とし、周期を合わせた信号波形を1つの信号の1周期分の波形とすることを、結合後の周期が前記代表値の0.5倍以上になるまで行う信号結合手順と、この信号結合手順の処理結果から前記計数期間中の入力信号の周期の度数分布を作成する第2の度数分布作成手順と、この第2の度数分布作成手順で作成した度数分布から前記入力信号の周期の分布の代表値を算出して代表値を最新の値に更新する第2の代表値算出手順と、前記計数期間における前記信号結合手順の処理後の単一の信号の1周期分の波形を数える信号計数手順と、前記信号結合手順の処理結果から、前記最新の代表値の0.5倍未満である周期の数の総和Nsと、前記最新の代表値の(n+0.5)倍以上(n+1.5)倍未満(nは1以上の自然数)である周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて前記信号計数手順の計数結果を補正する補正値算出手順とを含み、前記補正値算出手順は、前記信号計数手順の計数結果をN、前記代表値をT0、前記単一の信号の周期がとり得る最大値をT max としたとき、補正後の計数結果N’を、
また、本発明の計数方法の1構成例において、前記代表値は、中央値、最頻値、平均値、階級値と度数との積が最大となる階級値のうちのいずれか1つである。
In the present invention, the specific physical quantity and the number of single signals have a linear relationship, and when the specific physical quantity is constant, the waveform of one period of the signal having a substantially single frequency is counted. In the counting method, a signal cycle measuring procedure for measuring a cycle of a single input signal in a certain counting period every time a signal is inputted, and a cycle of the input signal in the counting period from a measurement result of the signal cycle measuring procedure A first frequency distribution creating procedure for creating a frequency distribution of the input signal, and a first representative value calculating procedure for calculating a representative value of the period distribution of the input signal from the frequency distribution created in the first frequency distribution creating procedure, In the measurement result of the signal cycle measurement procedure, a signal obtained by combining a cycle with a cycle obtained by combining a cycle having a length less than 0.5 times the representative value and a cycle measured immediately thereafter as a cycle after combination. Wave for one cycle of one signal The signal combining procedure that is performed until the combined period becomes 0.5 times or more of the representative value, and the frequency distribution of the period of the input signal during the counting period is created from the processing result of the signal combining procedure. A second frequency distribution creating procedure, and a second value for calculating a representative value of the distribution of the period of the input signal from the frequency distribution created by the second frequency distribution creating procedure and updating the representative value to the latest value. From the representative value calculation procedure, the signal counting procedure for counting the waveform of one cycle of the single signal after the signal combining procedure in the counting period, and the processing result of the signal combining procedure, the latest representative value The sum Ns of the number of cycles that is less than 0.5 times and the sum of the number of cycles that is (n + 0.5) times or more and (n + 1.5) times (n is a natural number of 1 or more) times the latest representative value. seeking and nw n, before on the basis of the frequencies Ns and Nw n And a correction value calculation procedure for correcting the counting result of the signal counting procedure, the correction value calculation procedure, the counting result of the signal counting procedure N, the representative value T0, the period of the single signal may take When the maximum value is T max , the corrected count result N ′ is
Moreover, in one configuration example of the counting method of the present invention, the representative value is any one of a median value, a mode value, an average value, and a class value that maximizes the product of the class value and the frequency. .
また、本発明の物理量計測方法は、発振波長が連続的に単調増加する第1の発振期間と発振波長が連続的に単調減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザを動作させる発振手順と、前記半導体レーザから放射されたレーザ光と測定対象からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手順と、前記干渉波形を計数対象の単一の信号とし、この信号の1周期分の波形を、前記第1の発振期間と前記第2の発振期間の各々を計数期間として数える信号抽出手順と、この信号抽出手順の計数結果から前記測定対象の物理量を求める演算手順とを含み、前記信号抽出手順は、前記の計数方法を用いることを特徴とするものである。 Further, the physical quantity measuring method of the present invention is a semiconductor in which at least one of the first oscillation period in which the oscillation wavelength continuously increases monotonically and the second oscillation period in which the oscillation wavelength continuously decreases monotonously exists. An oscillation procedure for operating a laser, a detection procedure for detecting an electrical signal including an interference waveform caused by a self-coupling effect between laser light emitted from the semiconductor laser and return light from the measurement object, and an object for counting the interference waveform A signal extraction procedure for counting the first oscillation period and the second oscillation period as a counting period, and a counting result of the signal extraction procedure. and a calculation procedure for obtaining the physical quantity of the measurement object, wherein the signal extraction procedure is characterized in the use of pre-Symbol counting method.
本発明によれば、計数期間中の入力信号の周期を測定し、この測定結果から計数期間中の入力信号の周期の度数分布を作成し、この度数分布から入力信号の周期の分布の代表値を算出し、周期の測定結果について、代表値の0.5倍未満の長さの周期とその直後に測定された周期とを合わせた周期を結合後の周期とし、周期を合わせた信号波形を1つの信号の1周期分の波形とすることを、結合後の周期が前記代表値の0.5倍以上になるまで行い、信号結合手段の処理結果から計数期間中の入力信号の周期の度数分布を再度作成し、この度数分布から入力信号の周期の代表値を算出して代表値を最新の値に更新し、計数期間における信号結合手段の処理後の信号を数え、信号結合手段の処理結果から、最新の代表値の0.5倍未満である周期の数の総和Nsと、最新の代表値の(n+0.5)倍以上(n+1.5)倍未満である周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて信号計数手段の計数結果を補正することにより、計数装置に入力される信号に高周波のノイズが連続して発生している場合であっても、計数誤差を高精度に補正することができる。 According to the present invention, the period of the input signal during the counting period is measured, and the frequency distribution of the period of the input signal during the counting period is created from the measurement result, and the representative value of the distribution of the period of the input signal from the frequency distribution For the measurement result of the cycle, the cycle that is less than 0.5 times the representative value and the cycle measured immediately after that is taken as the combined cycle, and the signal waveform that combines the cycles is The waveform of one cycle of one signal is made until the combined cycle becomes 0.5 times or more of the representative value, and the frequency of the input signal during the counting period is determined from the processing result of the signal combining means. Create the distribution again, calculate the representative value of the period of the input signal from this frequency distribution, update the representative value to the latest value, count the signal after processing of the signal combining means in the counting period, and process the signal combining means From the results, the circumference is less than 0.5 times the latest representative value. And the sum Ns of the number of seeking the latest representative values of (n + 0.5) times as long or more (n + 1.5) of the number of cycles is less than doubled sum Nw n, signals on the basis of the frequencies Ns and Nw n By correcting the counting result of the counting means, the counting error can be corrected with high accuracy even when high-frequency noise is continuously generated in the signal input to the counting device.
また、本発明では、計数誤差を高精度に補正可能な計数装置を用いることにより、計数装置に入力される信号に干渉波形よりも高周波のノイズが連続して発生している場合であっても、測定対象の物理量を高精度に計測することができる。 Further, in the present invention, even when high-frequency noise is continuously generated in the signal input to the counting device by using the counting device capable of correcting the counting error with high accuracy, the signal input to the counting device. The physical quantity to be measured can be measured with high accuracy.
[第1の参考例]
以下、本発明の参考例について図面を参照して説明する。図1は本発明の第1の参考例に係る振動周波数計測装置の構成を示すブロック図である。
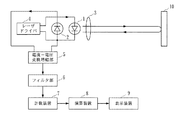
図1の振動周波数計測装置は、測定対象の物体10にレーザ光を放射する半導体レーザ1と、半導体レーザ1の光出力を電気信号に変換するフォトダイオード2と、半導体レーザ1からの光を集光して放射すると共に、物体10からの戻り光を集光して半導体レーザ1に入射させるレンズ3と、半導体レーザ1を駆動する発振波長変調手段となるレーザドライバ4と、フォトダイオード2の出力電流を電圧に変換して増幅する電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力電圧から搬送波を除去するフィルタ部6と、フィルタ部6の出力電圧に含まれる自己結合信号であるモードホップパルス(MHP)の数を数える計数装置7と、計数装置7の計数結果に基づいて物体10の振動周波数を求める演算装置8と、演算装置8の計測結果を表示する表示装置9とを有する。
[First Reference Example]
Hereinafter, reference examples of the present invention will be described with reference to the drawings. FIG. 1 is a block diagram showing a configuration of a vibration frequency measuring apparatus according to a first reference example of the present invention.
The vibration frequency measuring apparatus of FIG. 1 collects light from a
フォトダイオード2と電流−電圧変換増幅部5とは、検出手段を構成している。以下、説明容易にするために、半導体レーザ1には、モードホッピング現象を持たない型(VCSEL型、DFBレーザ型)のものが用いられているものと想定する。
The
レーザドライバ4は、時間に関して一定の変化率で増減を繰り返す三角波駆動電流を注入電流として半導体レーザ1に供給する。これにより、半導体レーザ1は、注入電流の大きさに比例して発振波長が一定の変化率で連続的に増加する第1の発振期間P1と発振波長が一定の変化率で連続的に減少する第2の発振期間P2とを交互に繰り返すように駆動される。このときの半導体レーザ1の発振波長の時間変化は、図33に示したとおりである。本参考例では、発振波長の最大値λb及び発振波長の最小値λaはそれぞれ常に一定になされており、それらの差λb−λaも常に一定になされている。
The
半導体レーザ1から出射したレーザ光は、レンズ3によって集光され、物体10に入射する。物体10で反射された光は、レンズ3によって集光され、半導体レーザ1に入射する。ただし、レンズ3による集光は必須ではない。フォトダイオード2は、半導体レーザ1の内部又はその近傍に配置され、半導体レーザ1の光出力を電流に変換する。電流−電圧変換増幅部5は、フォトダイオード2の出力電流を電圧に変換して増幅する。
Laser light emitted from the
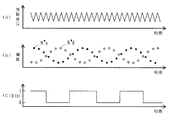
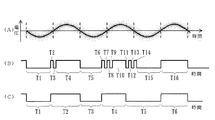
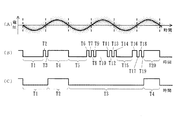
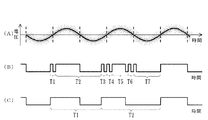
フィルタ部6は、変調波から重畳信号を抽出する機能を有するものである。図2(A)は電流−電圧変換増幅部5の出力電圧波形を模式的に示す図、図2(B)はフィルタ部6の出力電圧波形を模式的に示す図である。これらの図は、フォトダイオード2の出力に相当する図2(A)の波形(変調波)から、図2の半導体レーザ1の発振波形(搬送波)を除去して、図2(B)のMHP波形(干渉波形)を抽出する過程を表している。
The
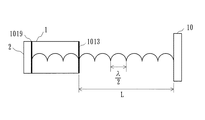
ここで、自己結合信号であるMHPについて説明する。図3に示すように、ミラー層1013から物体10までの距離をL、レーザの発振波長をλとすると、以下の共振条件を満足するとき、物体10からの戻り光と半導体レーザ1の光共振器内のレーザ光は強め合い、レーザ出力がわずかに増加する。
L=qλ/2 ・・・(1)
式(1)において、qは整数である。この現象は、物体10からの散乱光が極めて微弱であっても、半導体レーザ1の共振器内の見かけの反射率が増加することにより、増幅作用が生じ、十分観測できる。
Here, the MHP that is a self-coupled signal will be described. As shown in FIG. 3, when the distance from the
L = qλ / 2 (1)
In Formula (1), q is an integer. This phenomenon can be sufficiently observed even if the scattered light from the
図4は、半導体レーザ1の発振波長をある一定の割合で変化させたときの発振波長とフォトダイオード2の出力波形との関係を示す図である。式(1)に示したL=qλ/2を満足したときに、戻り光と光共振器内のレーザ光の位相差が0°(同位相)になって、戻り光と光共振器内のレーザ光とが最も強め合い、L=qλ/2+λ/4のときに、位相差が180°(逆位相)になって、戻り光と光共振器内のレーザ光とが最も弱め合う。そのため、半導体レーザ1の発振波長を変化させていくと、レーザ出力が強くなるところと弱くなるところとが交互に繰り返し現れ、このときのレーザ出力をフォトダイオード2で検出すると、図4に示すように一定周期の階段状の波形が得られる。このような波形は一般的には干渉縞と呼ばれる。この階段状の波形、すなわち干渉縞の1つ1つがMHPである。ある一定時間において半導体レーザ1の発振波長を変化させた場合、測定距離に比例してMHPの数は変化する。
FIG. 4 is a diagram showing the relationship between the oscillation wavelength and the output waveform of the
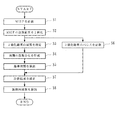
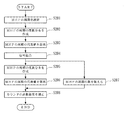
次に、計数装置7と演算装置8の動作について説明する。図5は計数装置7と演算装置8の動作を示すフローチャートである。
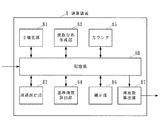
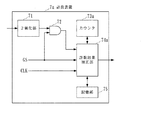
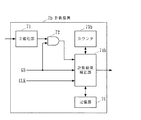
計数装置7は、フィルタ部6の出力電圧に含まれるMHPの数を第1の発振期間P1と第2の発振期間P2の各々について数える(図5ステップS1)。図6は計数装置7の構成の1例を示すブロック図である。計数装置7は、2値化部71と、論理積演算部(AND)72と、カウンタ73と、計数結果補正部74と、記憶部75とから構成される。電流−電圧変換増幅部5とフィルタ部6と計数装置7の2値化部71とAND72とカウンタ73とは、信号計数手段を構成している。
Next, operations of the
The
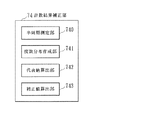
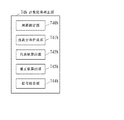
図7は計数装置7の動作を示すフローチャート、図8は計数結果補正部74の構成の1例を示すブロック図である。計数結果補正部74は、半周期測定部740と、度数分布作成部741と、代表値算出部742と、補正値算出部743とから構成される。
FIG. 7 is a flowchart showing the operation of the
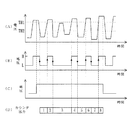
図9(A)〜図9(D)はカウンタ73の動作を説明するための図であり、図9(A)はフィルタ部6の出力電圧の波形、すなわちMHPの波形を模式的に示す図、図9(B)は図9(A)に対応する2値化部71の出力を示す図、図9(C)は計数装置7に入力されるゲート信号GSを示す図、図9(D)は図9(B)に対応するカウンタ73の計数結果を示す図である。
9A to 9D are diagrams for explaining the operation of the
まず、計数装置7の2値化部71は、図9(A)に示すフィルタ部6の出力電圧がハイレベル(H)かローレベル(L)かを判定して、図9(B)のような判定結果を出力する。このとき、2値化部71は、フィルタ部6の出力電圧が上昇してしきい値TH1以上になったときにハイレベルと判定し、フィルタ部6の出力電圧が下降してしきい値TH2(TH2<TH1)以下になったときにローレベルと判定することにより、フィルタ部6の出力を2値化する。
First, the
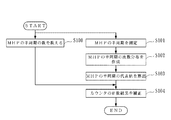
AND72は、2値化部71の出力と図9(C)のようなゲート信号GSとの論理積演算の結果を出力し、カウンタ73は、AND72の出力の立ち上がりと立ち下がりをカウントする(図9(D))。ここで、ゲート信号GSは、計数期間(本参考例では第1の発振期間P1または第2の発振期間P2)の先頭で立ち上がり、計数期間の終わりで立ち下がる信号である。したがって、カウンタ73は、計数期間中のAND72の出力の立ち上がりエッジの数と立ち下がりエッジの数(すなわち、MHPの半周期の数)を数えることになる(図7ステップS100)。
The AND 72 outputs a logical product operation result of the output of the
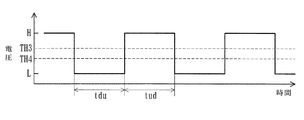
図10は計数結果補正部74の半周期測定部740の動作を説明するための図である。半周期測定部740は、計数期間中のMHPの半周期を測定する(図7ステップS101)。すなわち、半周期測定部740は、計数期間中のAND72の出力をしきい値TH3と比較することにより、AND72の出力の立ち上がりを検出すると共に、AND72の出力をしきい値TH4と比較することにより、AND72の出力の立ち下がりを検出する。そして、半周期測定部740は、AND72の出力の立ち上がりから次の立ち下がりまでの時間tudを測定し、またAND72の出力の立ち下がりから次の立ち上がりまでの時間tduを測定することにより、計数期間中のAND72の出力の半周期(すなわち、MHPの半周期)を測定する。このように、MHPの半周期とは、時間tudまたはtduのことである。半周期測定部740は、以上のような測定をAND72の出力の立ち上がりまたは立ち下がりのどちらかが検出される度に行う。
記憶部75は、カウンタ73の計数結果と半周期測定部740の測定結果を記憶する。
FIG. 10 is a diagram for explaining the operation of the half
The
ゲート信号GSが立ち下がり、計数期間が終了した後、計数結果補正部74の度数分布作成部741は、記憶部75に記憶された半周期測定部740の測定結果から計数期間中のMHPの半周期の度数分布を作成する(図7ステップS102)。
After the gate signal GS falls and the counting period ends, the frequency
続いて、計数結果補正部74の代表値算出部742は、度数分布作成部741が作成した度数分布から、MHPの半周期の代表値T0を算出する(図7ステップS103)。ここでは、MHPの半周期の最頻値や中央値、あるいは平均値を代表値T0とすればよい。また、代表値算出部742は、階級値と度数との積が最大となる階級値を代表値T0としてもよい。表1に、度数分布の数値例およびこの数値例における階級値と度数との積を示す。
Subsequently, the representative
表1の例では、度数が最大である最頻値(階級値)は1である。これに対して、階級値と度数との積が最大となる階級値は6であり、最頻値とは異なる値になっている。階級値と度数との積が最大となる階級値を代表値T0とする理由については後述する。代表値算出部742が算出した代表値T0は、記憶部75に格納される。代表値算出部742は、このような代表値T0の算出を、度数分布作成部741によって度数分布が作成される度に行う。
In the example of Table 1, the mode value (class value) having the maximum frequency is 1. On the other hand, the class value that maximizes the product of the class value and the frequency is 6, which is different from the mode value. The reason why the class value that maximizes the product of the class value and the frequency is set as the representative value T0 will be described later. The representative value T0 calculated by the representative
計数結果補正部74の補正値算出部743は、半周期測定部740の測定結果から、代表値T0の0.5倍未満である半周期の数の総和Nsと、代表値T0の2n倍以上(2n+2)倍未満(nは1以上nmax以下の自然数)である半周期の数の総和Nwnとを求め、カウンタ73の計数結果を次式のように補正する(図7ステップS104)。
From the measurement result of the half
式(2)において、Nはカウンタ73の計数結果であるMHPの半周期の数、N’は補正後に得られるMHPの数、TmaxはMHPの半周期がとり得る最大値である。このカウンタ73の計数結果の補正原理については後述する。
計数装置7は、以上のような処理を第1の発振期間P1と第2の発振期間P2の各々について行う。
In Equation (2), N is the number of half-cycles of MHP, which is the counting result of the
The
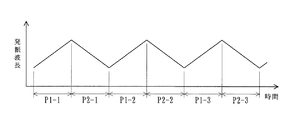
なお、補正値算出部743が用いる代表値T0は、補正対象の計数期間よりも搬送波(三角波)の1周期分前の計数期間における半周期測定部740の測定結果から算出された値を用いてもよいし、補正対象の計数期間における半周期測定部740の測定結果から算出された値を用いてもよい。図11は半導体レーザ1の発振波長の時間変化を示す図であり、代表値算出部742が代表値T0を算出する期間と補正対象の計数期間との関係を説明するための図である。
Note that the representative value T0 used by the correction
補正対象の計数期間よりも搬送波の1周期分前の測定結果から算出された代表値T0を用いる場合、補正値算出部743は、例えば図11に示す第1の発振期間P1−1で算出された代表値T0を用いて第1の発振期間P1−2の計数結果を補正し、第2の発振期間P2−1で算出された代表値T0を用いて第2の発振期間P2−2の計数結果を補正することになる。また、補正対象の計数期間の測定結果から算出された代表値T0を用いる場合、補正値算出部743は、例えば図11に示す第1の発振期間P1−1で算出された代表値T0を用いて第1の発振期間P1−1の計数結果を補正し、第2の発振期間P2−1で算出された代表値T0を用いて第2の発振期間P2−1の計数結果を補正することになる。
In the case of using the representative value T0 calculated from the measurement result one cycle before the correction target counting period, the correction
ただし、補正対象の計数期間よりも搬送波の1周期分前の測定結果から算出された代表値T0を用いる場合においても、最初の処理においては代表値T0の初期値が存在しないため、補正対象の計数期間における半周期測定部740の測定結果から代表値T0を求めて計数結果を補正することになる。
However, even when using the representative value T0 calculated from the measurement result of one cycle of the carrier wave before the counting period of the correction target, the initial value of the representative value T0 does not exist in the first process, so the correction target The representative value T0 is obtained from the measurement result of the half
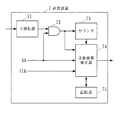
次に、演算装置8は、計数装置7が数えたMHPの数に基づいて物体10の振動周波数を算出する。図12は演算装置8の構成の1例を示すブロック図である。演算装置8は、計数装置7の計数結果等を記憶する記憶部80と、計数装置7の計数結果を2値化する2値化部81と、2値化部81から出力された2値化出力の周期を測定する周期測定部82と、2値化出力の周期の度数分布を作成する度数分布作成部83と、2値化出力の周期の分布の代表値である基準周期を算出する基準周期算出部84と、2値化出力のパルスの数を数える2値化出力計数手段となるカウンタ85と、カウンタ85の計数結果を補正する補正部86と、補正された計数結果に基づいて物体10の振動周波数を算出する周波数算出部87とから構成される。
Next, the
計数装置7の計数結果は、演算装置8の記憶部80に格納される。演算装置8の2値化部81は、記憶部80に格納された、計数装置7の計数結果を2値化する(図5ステップS2)。図13は2値化部81の動作を説明するための図であり、図13(A)は半導体レーザ1の発振波長の時間変化を示す図、図13(B)は計数装置7の計数結果の時間変化を示す図、図13(C)は2値化部81の出力D(t)を示す図である。図13(B)において、N’uは第1の発振期間P1の計数結果、N’dは第2の発振期間P2の計数結果である。
The counting result of the
2値化部81は、時間的に隣接する2つの発振期間P1,P2の計数結果N’uとN’dの大小を比較して、これらの計数結果を2値化する。2値化部81は、具体的には以下の式を実行する。
If N’u(t)≧N’d(t−1) then D(t)=1 ・・・(3)
If N’u(t)<N’d(t−1) then D(t)=0 ・・・(4)
If N’d(t)≦N’u(t−1) then D(t)=1 ・・・(5)
If N’d(t)>N’u(t−1) then D(t)=0 ・・・(6)
The
If N′u (t) ≧ N′d (t−1) then D (t) = 1 (3)
If N′u (t) <N′d (t−1) then D (t) = 0 (4)
If N′d (t) ≦ N′u (t−1) then D (t) = 1 (5)
If N′d (t)> N′u (t−1) then D (t) = 0 (6)
式(3)〜式(6)において、(t)は現時刻tにおいて計測されたMHPの数であることを表し、(t−1)は現時刻tの1回前に計測されたMHPの数であることを表している。式(3)、式(4)は、現時刻tの計数結果が第1の発振期間P1の計数結果N’uで、1回前の計数結果が第2の発振期間P2の計数結果N’dの場合である。この場合、2値化部81は、現時刻tの計数結果N’u(t)が1回前の計数結果N’d(t−1)以上であれば、現時刻tの出力D(t)を「1」(ハイレベル)とし、現時刻tの計数結果N’u(t)が1回前の計数結果N’d(t−1)より小さい場合は、現時刻tの出力D(t)を「0」(ローレベル)とする。
In Expressions (3) to (6), (t) represents the number of MHPs measured at the current time t, and (t−1) represents the MHP measured one time before the current time t. It represents a number. In Expressions (3) and (4), the count result at the current time t is the count result N′u in the first oscillation period P1, and the previous count result is the count result N ′ in the second oscillation period P2. This is the case of d. In this case, if the counting result N′u (t) at the current time t is greater than or equal to the previous counting result N′d (t−1), the
式(5)、式(6)は、現時刻tの計数結果が第2の発振期間P2の計数結果N’dで、1回前の計数結果が第1の発振期間P1の計数結果N’uの場合である。この場合、2値化部81は、現時刻tの計数結果N’d(t)が1回前の計数結果N’u(t−1)以下であれば、現時刻tの出力D(t)を「1」とし、現時刻tの計数結果N’d(t)が1回前の計数結果N’u(t−1)より大きい場合は、現時刻tの出力D(t)を「0」とする。
In Expressions (5) and (6), the counting result at the current time t is the counting result N′d of the second oscillation period P2, and the previous counting result is the counting result N ′ of the first oscillation period P1. This is the case for u. In this case, if the counting result N′d (t) at the current time t is equal to or less than the previous counting result N′u (t−1), the
こうして、計数装置7の計数結果は2値化される。2値化部81の出力D(t)は記憶部80に格納される。2値化部81は、以上のような2値化処理を、計数装置7によってMHPの数が測定される時刻毎(発振期間毎)に行う。
Thus, the counting result of the
計数装置7の計数結果を2値化することは、物体10の変位の方向を判別することを意味する。つまり、半導体レーザ1の発振波長が増加しているときの計数結果N’uが、発振波長が減少しているときの計数結果N’d以上の場合(D(t)=1)、物体10の移動方向は半導体レーザ1に接近する方向であり、計数結果N’uが計数結果N’dより小さい場合(D(t)=0)、物体10の移動方向は半導体レーザ1から遠ざかる方向である。したがって、基本的には図13(C)に示した2値化出力の周期を求めることができれば、物体10の振動周波数を算出することができる。
Binarizing the counting result of the
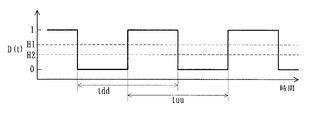
周期測定部82は、記憶部80に格納された2値化出力D(t)の周期を測定する(図5ステップS3)。図14は周期測定部82の動作を説明するための図である。図14において、H1は2値化出力D(t)の立ち上がりを検出するためのしきい値、H2は2値化出力D(t)の立ち下がりを検出するためのしきい値である。
The
周期測定部82は、記憶部80に格納された2値化出力D(t)をしきい値H1と比較することにより、2値化出力D(t)の立ち上がりを検出し、2値化出力D(t)の立ち上がりから次の立ち上がりまでの時間tuuを測定することにより、2値化出力D(t)の周期を測定する。周期測定部82は、このような測定を2値化出力D(t)に立ち上がりエッジが発生する度に行う。
The
あるいは、周期測定部82は、記憶部80に格納された2値化出力D(t)をしきい値H2と比較することにより、2値化出力D(t)の立ち下がりを検出し、2値化出力D(t)の立ち下がりから次の立ち下がりまでの時間tddを測定することにより、2値化出力D(t)の周期を測定してもよい。周期測定部82は、このような測定を2値化出力D(t)に立ち下がりエッジが発生する度に行う。
Alternatively, the
周期測定部82の測定結果は記憶部80に格納される。次に、度数分布作成部83は、周期測定部82の測定結果から、一定時間T(T>Ttであり、例えば100×Tt、すなわち三角波100個分の時間)における周期の度数分布を作成する(図5ステップS4)。図15は度数分布の1例を示す図である。度数分布作成部83が作成した度数分布は、記憶部80に格納される。度数分布作成部83は、このような度数分布の作成をT時間毎に行う。
The measurement result of the
続いて、基準周期算出部84は、度数分布作成部83が作成した度数分布から、2値化出力D(t)の周期の代表値である基準周期Trを算出する(図5ステップS5)。一般に、周期の代表値は最頻値や中央値であるが、本参考例においては、最頻値や中央値が周期の代表値として適していない。そこで、基準周期算出部84は、階級値と度数との積が最大となる階級値を基準周期Trとする。階級値と度数との積が最大となる階級値を基準周期Trとする理由については後述する。算出された基準周期Trの値は、記憶部80に格納される。基準周期算出部84は、このような基準周期Trの算出を、度数分布作成部83によって度数分布が作成される度に行う。
Subsequently, the reference
一方、カウンタ85は、周期測定部82および度数分布作成部83と並行して動作し、度数分布作成部83が度数分布作成の対象とする期間と同じ一定時間Tの期間において、2値化出力D(t)の立ち上がりエッジの数Na(すなわち、2値化出力D(t)の「1」のパルスの数)を数える(図5ステップS6)。カウンタ85の計数結果Naは、記憶部80に格納される。カウンタ85は、このような2値化出力D(t)の計数をT時間毎に行う。
On the other hand, the
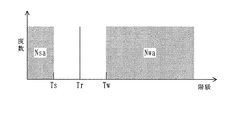
補正部86は、度数分布作成部83が作成した度数分布から、基準周期Trの0.5倍以下である階級の度数の総和Nsaと、基準周期Trの1.5倍以上である階級の度数の総和Nwaとを求め、カウンタ85の計数結果Naを次式のように補正する(図5ステップS7)。
Na’=Na−Nsa+Nwa ・・・(7)
式(7)において、Na’は補正後の計数結果である。この補正後の計数結果Na’は、記憶部80に格納される。補正部86は、このような補正をT時間毎に行う。
From the frequency distribution created by the frequency
Na ′ = Na−Nsa + Nwa (7)
In equation (7), Na ′ is the corrected count result. The corrected count result Na ′ is stored in the
図16は度数の総和NsaとNwaを模式的に表す図である。図16において、Tsは基準周期Trの0.5倍の階級値、Twは基準周期Trの1.5倍の階級値である。図16における階級が、周期の代表値であることは言うまでもない。なお、図16では記載を簡略化するため、基準周期TrとTsとの間、及び基準周期TrとTwとの間の度数分布を省略している。 FIG. 16 is a diagram schematically showing the total frequency Nsa and Nwa. In FIG. 16, Ts is a class value 0.5 times the reference period Tr, and Tw is a class value 1.5 times the reference period Tr. It goes without saying that the class in FIG. 16 is a representative value of the period. In FIG. 16, the frequency distribution between the reference periods Tr and Ts and between the reference periods Tr and Tw is omitted in order to simplify the description.
図17はカウンタ85の計数結果の補正原理を説明するための図であり、図17(A)は2値化出力D(t)を示す図、図17(B)は図17(A)に対応するカウンタ85の計数結果を示す図である。
本来、2値化出力D(t)の周期は物体10の振動周波数によって異なるが、物体10の振動周波数が不変であれば、2値化出力D(t)のパルスは同じ周期で出現する。しかし、ノイズのために、MHPの波形には欠落が生じたり、信号として数えるべきでない波形が生じたりして、結果として2値化出力D(t)の波形にも欠落や信号として数えるべきでない波形が生じ、2値化出力D(t)のパルスの計数結果に誤差が生じる。
FIG. 17 is a diagram for explaining the correction principle of the counting result of the
Originally, the cycle of the binarized output D (t) varies depending on the vibration frequency of the
信号の欠落が生じると、欠落が生じた箇所での2値化出力D(t)の周期Twは、本来の周期のおよそ2倍になる。つまり、2値化出力D(t)の周期が基準周期Trのおよそ2倍以上の場合には、信号に欠落が生じていると判断できる。そこで、周期Tw以上の階級の度数の総和Nwaを信号が欠落した回数と見なし、このNwaをカウンタ85の計数結果Naに加算することで、信号の欠落を補正することができる。
When signal loss occurs, the cycle Tw of the binarized output D (t) at the location where the loss occurs is approximately twice the original cycle. That is, when the period of the binarized output D (t) is approximately twice or more than the reference period Tr, it can be determined that the signal is missing. Therefore, the sum of the frequencies Nwa of the class equal to or higher than the period Tw is regarded as the number of missing signals, and the missing signal can be corrected by adding this Nwa to the counting result Na of the
また、スパイクノイズなどによって本来の信号が分割された箇所での2値化出力D(t)の周期Tsは、本来の周期と比較して0.5倍よりも短い信号と0.5倍よりも長い信号の2つになる。つまり、2値化出力D(t)の周期が基準周期Trのおよそ0.5倍以下の場合には、信号を過剰に数えていると判断できる。そこで、周期Ts以下の階級の度数の総和Nsaを信号を過剰に数えた回数と見なし、このNsaをカウンタ85の計数結果Naから減算することで、誤って数えたノイズを補正することができる。以上が、式(7)に示した計数結果の補正原理である。
Further, the cycle Ts of the binarized output D (t) at the portion where the original signal is divided by spike noise or the like is shorter than 0.5 times the signal shorter than the original cycle and 0.5 times. Becomes two of the long signals. That is, when the period of the binarized output D (t) is approximately 0.5 times or less of the reference period Tr, it can be determined that the signals are excessively counted. Therefore, it is possible to correct the noise that is erroneously counted by regarding the total sum Nsa of the frequencies of the classes equal to or less than the period Ts as the number of times the signal is excessively counted and subtracting this Nsa from the counting result Na of the
周波数算出部87は、補正部86が計算した補正後の計数結果Na’に基づいて、物体10の振動周波数fsigを次式のように算出する(図5ステップS8)。
fsig=Na’/T ・・・(8)
表示装置9は、演算装置8が算出した振動周波数fsigの値を表示する。
Based on the corrected count result Na ′ calculated by the
fsig = Na ′ / T (8)
The
ここで、計数装置7のカウンタ73の計数結果の補正原理を説明する。式(2)に示した計数結果の補正の基本原理は、特許文献2に開示された計数結果の補正原理や、式(7)に示した計数結果の補正原理と同じである。しかしながら、特許文献2に開示された補正原理によると、計数装置に入力される信号にMHPよりも高周波のバーストノイズが混入した場合、カウンタ73の計数結果を正しく補正できない場合がある。特に、振動周波数計測におけるサンプリング数は振動周波数の数倍程度の時間しか取れない場合があり、わずかな計数誤差は大きな周波数誤差になる可能性がある。以下に、振動周波数計測を例にして従来の問題を説明する。
Here, the correction principle of the counting result of the
図18(A)〜図18(D)は特許文献2に開示された従来の計数装置の問題点を説明するための図であり、図18(A)は物体10との距離の時間変化を示す図、図18(B)は物体10の速度の時間変化を示す図、図18(C)は計数装置の計数結果の時間変化を示す図、図18(D)は計数装置の計数結果を2値化した2値化出力D(t)を示す図である。図18(B)において,160は速度が小さい箇所を示し、161は物体10の移動方向が半導体レーザ1に接近する方向であることを示し、162は物体10の移動方向が半導体レーザ1から遠ざかる方向であることを示している。なお、図18(A)〜図18(D)は本参考例において物体10の振動の最大速度と物体10との距離の比が、半導体レーザ1の波長変化率よりも小さい場合を示しているが、従来の計数装置においても信号波形は同様であるので、図18(A)〜図18(D)を用いて従来の計数装置の問題点を説明する。
18 (A) to 18 (D) are diagrams for explaining the problems of the conventional counting device disclosed in
図18(C)に示すように物体10の速度が小さい箇所163において、MHPよりも高周波のノイズが加わると、計数結果N’uとN’dの大小関係が本来の関係と反転する場合がある。その結果、図18(D)に示すように、2値化出力D(t)の符号が切り替わる箇所164において、2値化出力D(t)の符号が本来の値と逆の値になることがある。
As shown in FIG. 18C, when a noise having a frequency higher than that of MHP is applied at a
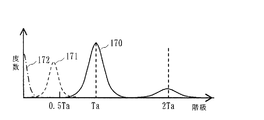
MHPをあるしきい値で2値化する場合、MHPがしきい値に近い値をとるところで高周波のノイズのために符号が反転しやすく、このように符号が反転し易い箇所はMHPの1/2周期毎に存在するため、MHPの周期の度数分布は、図19に示すように、MHPの本来の周期Taに度数の極大値を持つ分布170に加え、周期Taのおよそ半分の周期に度数の極大値を持つ分布171やノイズの短い周期172が現れる。そして、混入した高周波のノイズのためにこれらの度数の極大値はやや時間が短い方へとシフトする傾向にある。さらに、高周波のノイズは、連続で混入することがある。特許文献2に開示された従来の計数装置では、このような高周波の連続したノイズが混入すると、MHPの計数結果を十分に補正することができない。
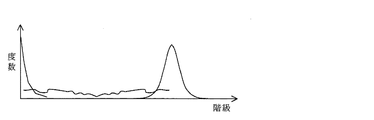
When binarizing MHP with a certain threshold value, the sign is likely to be inverted due to high-frequency noise where MHP takes a value close to the threshold value. Since the frequency distribution of the MHP period exists every two periods, as shown in FIG. 19, in addition to the distribution 170 having the maximum value of the frequency in the original period Ta of the MHP, the frequency distribution is about half the period Ta. A distribution 171 having a local maximum value and a short period 172 of noise appear. Then, due to the mixed high frequency noise, the maximum values of these frequencies tend to shift to a shorter time. Furthermore, high frequency noise may be mixed continuously. In the conventional counting device disclosed in
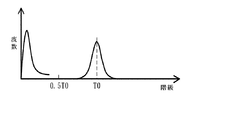
そこで、本参考例では、MHPの周期の代表値Taではなく、半周期の代表値T0を用いて計数結果を補正するようにした。MHPの半周期の度数分布の例を図20に示す。図20から明らかなように、MHPの半周期の度数分布を求めると、計数装置7に入力される信号に高周波のノイズが混入している場合であっても、0.5T0付近に度数の極大値が現れることがなくなる。つまり、代表値T0の0.5倍未満である半周期の数の総和Nsを求めるしきい値付近の度数の極大値が消えたことになるので、上記のNsを正しく求めることができ、補正の誤差を抑制することができる。以上が、式(2)に示した計数結果の補正原理である。なお、式(2)の右辺を1/2倍している理由は、MHPの半周期の数をMHPの数に変換するためである。
Therefore, in this reference example, the count result is corrected using the representative value T0 of the half cycle instead of the representative value Ta of the MHP cycle. An example of the frequency distribution of a half cycle of MHP is shown in FIG. As is clear from FIG. 20, when the frequency distribution of the half cycle of MHP is obtained, the frequency maximum is near 0.5T0 even when high-frequency noise is mixed in the signal input to the
以上のように、本参考例では、計数期間中のMHPの半周期の数をカウンタ73で数え、計数期間中のMHPの半周期を測定し、この測定結果から計数期間中のMHPの半周期の度数分布を作成し、度数分布からMHPの半周期の代表値T0を算出し、代表値T0の0.5倍未満である半周期の数の総和Nsと、代表値T0の2n倍以上(2n+2)倍未満である半周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいてカウンタ73の計数結果を補正することにより、計数装置に入力される信号にMHPよりも高周波のノイズが連続して発生している場合であっても、MHPの計数誤差を高精度に補正することができるので、物体10の振動周波数の計測精度を向上させることができる。
As described above, in this reference example, the
さらに、本参考例では、時間的に隣接する第1、第2の発振期間P1,P2の計数結果の大小を比較してMHPの計数結果を2値化し、2値化出力D(t)の周期を測定して一定時間Tにおける周期の度数分布を作成し、周期の度数分布から2値化出力D(t)の周期の分布の代表値である基準周期Trを算出し、一定時間Tの期間において2値化出力D(t)のパルスの数を数え、度数分布から、基準周期Trの0.5倍以下である階級の度数の総和Nsaと基準周期Trの1.5倍以上である階級の度数の総和Nwaとを求め、これらの度数NsaとNwaに基づいて2値化出力D(t)のパルスの計数結果を補正することにより、2値化出力D(t)の計数誤差を補正することができるので、物体10の振動周波数の測定精度を向上させることができる。
Furthermore, in this reference example, the count results of the first and second oscillation periods P1 and P2 that are temporally adjacent to each other are compared to binarize the MHP count result, and the binarized output D (t) A cycle frequency distribution at a fixed time T is measured to calculate a reference cycle Tr that is a representative value of the cycle distribution of the binarized output D (t) from the cycle frequency distribution. In the period, the number of pulses of the binarized output D (t) is counted, and from the frequency distribution, the total frequency Nsa of the class that is 0.5 times or less of the reference period Tr and 1.5 times or more of the reference period Tr. By calculating the sum Nwa of the frequencies of the class and correcting the counting result of the pulses of the binarized output D (t) based on these frequencies Nsa and Nwa, the counting error of the binarized output D (t) is reduced. Since it can be corrected, the measurement accuracy of the vibration frequency of the
次に、基準周期算出部84が、階級値と度数との積が最大となる階級値を基準周期Trとする理由について説明する。
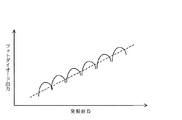
波長変調(本参考例では三角波変調)を用いた自己結合型のレーザ計測装置においては、各計数期間におけるMHPの数は、物体10との距離に比例したMHPの数と計数期間における物体10の変位(速度)に比例したMHPの数との和もしくは差になる。物体10の振動の最大速度と物体10との距離の比と、半導体レーザ1の波長変化率の大小関係によって、計測装置で得られる信号の状況を以下の2通りに分けることができる。
Next, the reason why the reference
In a self-coupled laser measuring device using wavelength modulation (triangular wave modulation in this reference example), the number of MHPs in each counting period is the number of MHPs proportional to the distance to the
まず、物体10の振動の最大速度と物体10との距離の比が、半導体レーザ1の波長変化率よりも小さい場合を図18(A)〜図18(D)を用いて説明する。物体10の振動の最大速度と物体10との距離の比が半導体レーザ1の波長変化率よりも小さい場合は、物体10との距離に比例したMHPの数が、計数期間における物体10の変位(速度)に比例したMHPの数よりも常に大きいため、半導体レーザ1の発振波長が増加しているときの計数結果N’uと発振波長が減少しているときの計数結果N’dとの差の絶対値が2つの計数期間(本参考例では発振期間P1とP2)における物体10の変位に常に比例することになる。この場合、N’u−N’dを時系列でプロットすると、半導体レーザ1への接近方向を正とした振動の速度を示す。そのため、N’u−N’dの符号が物体10の運動方向を示すことになり、この符号によって物体10の変位を2値化することができる。
First, a case where the ratio of the maximum speed of vibration of the
このとき、度数分布作成部83によって作成される周期の度数分布は、図21のようになる。
図18(C)に示すように物体10の速度が小さい箇所163において、例えば外乱光などに起因するホワイトノイズが加わると、2値化出力D(t)の符号が切り替わる箇所164において、2値化出力D(t)の符号が本来の値と逆の値になることがある。また、例えば外乱光などに起因するスパイクノイズが加わると、図18(D)に示すように箇所165において2値化出力D(t)の符号が局所的に反転する。
At this time, the frequency distribution of the period created by the frequency
As shown in FIG. 18C, when white noise due to, for example, ambient light is added at a
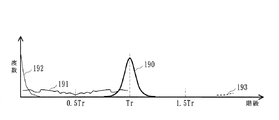
その結果、度数分布作成部83によって作成される周期の度数分布は、図21に示すように、基準周期Trを中心とした正規分布190と、スパイクノイズに起因する符号反転による度数191と、ホワイトノイズに起因する符号逆転による度数192との和になる。また、2値化を実施したときの信号の欠落の度数193は、大きな速度を持った低周波ノイズが混入しない限り生じないことが多い。
As a result, as shown in FIG. 21, the frequency distribution of the period created by the frequency
次に、物体10の振動の最大速度と物体10との距離の比が、半導体レーザ1の波長変化率よりも大きい場合について説明する。図22は、この場合に本参考例の振動周波数計測装置で得られる信号を説明するための図であり、図22(A)は物体10との距離の時間変化を示す図、図22(B)は物体10の速度の時間変化を示す図、図22(C)は計数装置7の計数結果の時間変化を示す図、図22(D)は2値化部81による2値化出力D(t)を示す図である。図22(B)において,220は速度が小さい箇所を示し、221は物体10の移動方向が半導体レーザ1に接近する方向であることを示し、222は物体10の移動方向が半導体レーザ1から遠ざかる方向であることを示している。
Next, a case where the ratio of the maximum speed of vibration of the
物体10の振動の最大速度と物体10との距離の比が、半導体レーザ1の波長変化率よりも大きい場合は、物体10の最大速度付近で、物体10との距離に比例したMHPの数が、計数期間における物体10の変位(速度)に比例したMHPの数よりも小さくなるため、半導体レーザ1の発振波長が増加しているときの計数結果N’uと発振波長が減少しているときの計数結果N’dとの差が2つの計数期間(本参考例では発振期間P1とP2)における物体10の変位に比例する期間と、計数結果N’uと計数結果N’dとの和が2つの計数期間における物体10の変位に比例する期間とが存在する。
When the ratio of the maximum speed of vibration of the
この場合、物体10の振動の速度は、図22(B)のようにN’u−N’dとN’u+N’dを時系列でプロットしたグラフの合成で表現することができる。ただし、速度の方向は常にN’uとN’dとの大小関係と一致するため、N’u−N’dの符号が物体10の運動方向を示すことになり、この符号によって物体10の変位を2値化することができる。
In this case, the vibration speed of the
物体10の振動の最大速度と物体10との距離の比が、半導体レーザ1の波長変化率よりも小さい場合と同様に、物体10の速度が小さい箇所223において、例えば外乱光などに起因するホワイトノイズが加わると、2値化出力D(t)の符号が切り替わる箇所224において、2値化出力D(t)の符号が本来の値と逆の値になることがある。また、例えば外乱光などに起因するスパイクノイズが加わると、図22(D)に示すように箇所225において2値化出力D(t)の符号が局所的に反転する。このとき、度数分布作成部83によって作成される周期の度数分布は、図21と同様である。
Similar to the case where the ratio of the maximum speed of vibration of the
本参考例のように物体10の変位を2値化した2値化出力D(t)を補正する場合においては、高周波ノイズの補正が重要になる。高周波ノイズによる短い周期での符号の変化は物体10の本来の振動の周期の度数を上回ることがあり、周期の代表値として最頻値や中央値などを用いた場合、誤って振動周期よりも短いノイズの周期を基準として補正を掛けてしまう懸念がある。そのため、振動周波数を算出するための一定時間Tの期間において、ある階級の信号が占める割合、つまり階級値と度数との積が最も大きい階級値を基準周期Trとして、カウンタ85の計数結果の補正を実施する。以上が、階級値と度数との積が最大となる階級値を基準周期Trとする理由である。
代表値算出部742が、階級値と度数との積が最大となる階級値を代表値T0とする理由も同様である。つまり、代表値T0として最頻値や中央値を用いるよりも、計数期間において、ある階級の信号が占める割合が最も大きい階級値を代表値T0とした方が、高周波ノイズが存在する場合にはより好ましい。
In the case of correcting the binarized output D (t) obtained by binarizing the displacement of the
The reason why the representative
なお、本参考例の他の例として、カウンタ85の計数結果を補正する技術に、カウンタ73の計数結果を補正する技術を適用してもよい。
As another example of this reference example, a technique for correcting the count result of the
[第2の参考例]
次に、本発明の第2の参考例について説明する。図23は本参考例の計数装置の構成の1例を示す図である。本参考例は、第1の参考例の計数装置7の代わりに計数装置7aを用いるものである。計数装置7aは、2値化部71と、AND72と、カウンタ73aと、計数結果補正部74aと、記憶部75とから構成される。
図24は本参考例の計数結果補正部74aの構成の1例を示すブロック図である。計数結果補正部74aは、半周期測定部740と、度数分布作成部741aと、代表値算出部742aと、補正値算出部743aと、信号結合部744とから構成される。
[Second Reference Example]
Next, a second reference example of the present invention will be described. FIG. 23 is a diagram showing an example of the configuration of the counting device of this reference example. This reference example uses a counting device 7a instead of the
FIG. 24 is a block diagram showing an example of the configuration of the counting result correction unit 74a of this reference example. The counting result correcting unit 74a includes a half-
図25は本参考例の計数装置7aの動作を示すフローチャートである。第1の参考例で説明したとおり、半周期測定部740は、計数期間中のMHPの半周期を測定する(図25ステップS101)。
第1の参考例と同様に、度数分布作成部741aは、記憶部75に記憶された半周期測定部740の測定結果から計数期間中のMHPの半周期の度数分布を作成する(図25ステップS102)。
FIG. 25 is a flowchart showing the operation of the counting device 7a of this reference example. As described in the first reference example, the half
Similarly to the first reference example, the frequency
第1の参考例と同様に、代表値算出部742aは、度数分布作成部741aがステップS102で作成した度数分布から、MHPの半周期の代表値T0を算出する(図25ステップS103)。第1の参考例と同様に、MHPの半周期の最頻値や中央値、あるいは平均値を代表値T0としてもよいし、階級値と度数との積が最大となる階級値を代表値T0としてもよい。代表値算出部742aが算出した代表値T0は、記憶部75に格納される。
Similar to the first reference example, the representative
次に、信号結合部744は、半周期測定部740の測定結果について、代表値T0の0.5倍未満の長さの半周期とその直後に測定された半周期とを合わせた周期を結合後の半周期とし、周期を合わせた波形を1つのMHPの半周期分の波形とすることを、結合後の半周期が代表値T0の0.5倍以上になるまで行う(図25ステップS105)。図26(A)〜図26(C)は信号結合部744の動作を説明するための図であり、図26(A)はMHPの波形を模式的に示す図、図26(B)は半周期測定部740の測定結果を示す図、図26(C)は信号結合部744の処理結果を示す図である。
Next, the
半周期測定部740が図26(A)に示すMHPの半周期を測定すると、図26(B)に示すように半周期T1,T2,T3,T4,T5,T6,T7,T8,T9,T10,T11,T12,T13,T14,T15,T16という測定結果が得られる。このうち、半周期T2,T3,T6〜T9,T11〜T14は高周波ノイズ等の原因により生じたものである。この場合、半周期T2,T3,T6〜T14は代表値T0の0.5倍未満の長さであるため、第1の参考例の計数装置7においてはT10がMHPの半周期として認識されず、計数結果に誤差が生じる。
When the half-
これに対して、本参考例では、信号結合部744が上記のような信号の結合処理を行うことにより、図26(C)に示すように半周期T1,T2,T3,T4,T5,T6という処理結果が得られる。例えば半周期T2〜T4を合わせた周期が結合後の半周期T2となり、T2〜T4の波形が1つのMHPの半周期分の波形として結合される。同様に、半周期T6〜T10を合わせた周期が結合後の半周期T4となり、T6〜T10の波形が1つのMHPの半周期分の波形として結合される。信号結合部744の処理結果は、記憶部75に格納される。
On the other hand, in this reference example, the
次に、度数分布作成部741aは、記憶部75に記憶された信号結合部744の処理結果から計数期間中のMHPの半周期の度数分布を作成する(図25ステップS106)。
続いて、代表値算出部742aは、度数分布作成部741aがステップS106で作成した度数分布から、MHPの半周期の代表値T0を算出する(図25ステップS107)。これにより、記憶部75に格納されている代表値T0は、ステップS107で算出された最新の値に更新される。第1の参考例と同様に、MHPの半周期の最頻値や中央値、あるいは平均値を代表値T0としてもよいし、階級値と度数との積が最大となる階級値を代表値T0としてもよい。
Next, the frequency
Subsequently, the representative
一方、カウンタ73aは、信号結合部744の処理後のMHPについて、MHPの半周期の数を数える(図25ステップS108)。
最後に、補正値算出部743aは、信号結合部744の処理結果から、代表値T0の0.5倍未満である半周期の数の総和Nsと、代表値T0の2n倍以上(2n+2)倍未満(nは1以上nmax以下の自然数)である半周期の数の総和Nwnとを求め、カウンタ73aの計数結果Nを式(2)のように補正する(図25ステップS109)。
計数装置7aは、以上のような処理を第1の発振期間P1と第2の発振期間P2の各々について行う。
On the other hand, the
Finally, the correction
The counting device 7a performs the above processing for each of the first oscillation period P1 and the second oscillation period P2.
その他の構成は、第1の参考例と同じである。第1の参考例では、MHPの信号強度低下と計数装置7に入力される信号へのバーストノイズの混入とが同時に発生した場合、MHPが少なく計数されることがあるが、本参考例によれば、このような計数誤差を少なくすることができる。
Other configurations are the same as those of the first reference example. In the first reference example, when a decrease in signal strength of MHP and mixing of burst noise into the signal input to the
なお、本参考例では、ステップS102において計数期間中のMHPの半周期の度数分布を作成し、ステップS103において度数分布からMHPの半周期の代表値T0を算出しているが、これに限るものではなく、ステップS102において度数分布を作成することなく、代表値算出部742aが、ステップS103において半周期測定部740の測定結果から計数期間中のMHPの半周期の平均値を代表値T0として算出してもよい。
In this reference example, the frequency distribution of the half cycle of MHP during the counting period is created in step S102, and the representative value T0 of the half cycle of MHP is calculated from the frequency distribution in step S103. However, the present invention is not limited to this. Instead, the representative
[第3の参考例]
次に、本発明の第3の参考例について説明する。本参考例においても、計数装置の構成および処理の流れは第2の参考例と同様であるので、図23〜図25の符号を用いて本参考例について説明する。
図25のステップS101〜S103の処理は、第2の参考例と同じである。
[Third Reference Example]
Next, a third reference example of the present invention will be described. Also in this reference example, the configuration of the counting device and the flow of processing are the same as in the second reference example, and therefore this reference example will be described using the reference numerals in FIGS.
The processes in steps S101 to S103 in FIG. 25 are the same as those in the second reference example.
次に、本参考例の信号結合部744は、半周期測定部740の測定結果について、代表値T0の0.5倍未満の長さの半周期が代表値T0の0.5倍以上の長さのm番目の半周期Tmと代表値T0の0.5倍以上の長さのp番目の半周期Tp(m,pは自然数)とに挟まれていたとき、(m+p)が偶数の場合は半周期Tmから半周期Tpまでを合わせた周期を結合後の半周期とし、(m+p)が奇数の場合は半周期Tmから半周期Tp-1までを合わせた周期を結合後の半周期とし、周期を合わせた波形をm番目の半周期分の波形とする(図25ステップS105)。
Next, the
図27(A)〜図27(C)は本参考例の信号結合部744の動作を説明するための図であり、図27(A)はMHPの波形を模式的に示す図、図27(B)は半周期測定部740の測定結果を示す図、図27(C)は信号結合部744の処理結果を示す図である。
半周期測定部740が図27(A)に示すMHPの半周期を測定すると、図27(B)に示すように半周期T1〜T20という測定結果が得られる。この場合、半周期T2,T3,T6〜T14,T16〜T19は代表値T0の0.5倍未満の長さであるため、第1の参考例の計数装置7においてはT10がMHPの半周期として認識されず、計数結果に補正誤差が生じる。
27A to 27C are diagrams for explaining the operation of the
When the half
これに対して、本参考例では、信号結合部744が上記のような信号の結合処理を行うことにより、図27(C)に示すように半周期T1,T2,T3,T4という処理結果が得られる。例えば半周期T2,T3は代表値T0の0.5倍以上の長さの半周期T1とT4に挟まれており、m+pは1+4=5で奇数である。したがって、T1〜T3の波形が1つのMHPの半周期分の波形として結合され、半周期T1〜T3を合わせた周期が結合後の半周期T1となる。
On the other hand, in this reference example, the
同様に、半周期T6〜T14は代表値T0の0.5倍以上の長さの半周期T5とT15に挟まれており、m+pは5+15=20で偶数である。したがって、T5〜T15の波形が1つのMHPの半周期分の波形として結合され、半周期T5〜T15を合わせた周期が結合後の半周期T3となる。さらに、半周期T16〜T19は結合後の半周期T3と代表値T0の0.5倍以上の長さの半周期T20に挟まれており、m+pは3+20=23で奇数である。したがって、半周期T3,T16〜T19の波形が1つのMHPの半周期分の波形として結合され、半周期T3,T16〜T19を合わせた周期が結合後の半周期T3となる。信号結合部744の処理結果は、記憶部75に格納される。
Similarly, the half periods T6 to T14 are sandwiched between half periods T5 and T15 having a length of 0.5 times or more of the representative value T0, and m + p is an even number of 5 + 15 = 20. Therefore, the waveforms of T5 to T15 are combined as a waveform corresponding to one MHP half cycle, and the combined period of the half cycles T5 to T15 is a combined half cycle T3. Further, the half periods T16 to T19 are sandwiched between the combined half period T3 and the half period T20 having a length of 0.5 times or more of the representative value T0, and m + p is an odd number of 3 + 20 = 23. Therefore, the waveforms of the half periods T3, T16 to T19 are combined as a waveform corresponding to one MHP half period, and the combined period of the half periods T3, T16 to T19 is the combined half period T3. The processing result of the
図25のステップS106〜S109の処理は、第2の参考例と同じである。第2の参考例によれば、第1の参考例に比べて計数誤差を少なくすることができるが、計数装置7aに入力される信号にMHPの1/4周期以上のバーストノイズやポップコーンノイズが混入した場合、バーストノイズやポップコーンノイズが計数されてしまい、計数誤差が生じることがある。これに対して、本参考例では、このようなノイズの混入がある場合でも、計数誤差を少なくすることができる。 The processes in steps S106 to S109 in FIG. 25 are the same as those in the second reference example. According to the second reference example, the counting error can be reduced as compared with the first reference example. However, burst noise or popcorn noise having a period of 1/4 or more of MHP is included in the signal input to the counting device 7a. When mixed, burst noise and popcorn noise are counted, and a counting error may occur. On the other hand, in this reference example, even when such noise is mixed, the counting error can be reduced.
なお、第2の参考例と同様に、ステップS102において度数分布を作成することなく、代表値算出部742aが、ステップS103において半周期測定部740の測定結果から計数期間中のMHPの半周期の平均値を代表値T0として算出してもよい。
As in the second reference example, the representative
また、第2の参考例、第3の参考例において、ステップS106,S107の処理は必須の構成要件ではない。その理由は、結合前の代表値は度数分布を用いて精度良く求められているため、必ずしも再度代表値を求める必要はないからである。ステップS106,S107の処理を実行しない場合、補正値算出部743aは、ステップS103で算出された代表値T0を使用すればよい。ただし、ステップS103で算出する代表値T0の精度が低いと考えられる場合には、ステップS106,S107の処理を実行するようにしてもよい。
In the second reference example and the third reference example, the processing in steps S106 and S107 is not an indispensable component. The reason is that the representative value before combining is obtained with high accuracy using the frequency distribution, and therefore it is not always necessary to obtain the representative value again. When the processes in steps S106 and S107 are not executed, the correction
[実施の形態]
次に、本発明の実施の形態について説明する。図28は本実施の形態の計数装置の構成の1例を示す図である。本実施の形態は、第1の参考例の計数装置7の代わりに計数装置7bを用いるものである。計数装置7bは、2値化部71と、AND72と、カウンタ73bと、計数結果補正部74bと、記憶部75とから構成される。
図29は本実施の形態の計数結果補正部74bの構成の1例を示すブロック図である。計数結果補正部74bは、周期測定部745と、度数分布作成部741bと、代表値算出部742bと、補正値算出部743bと、信号結合部744bとから構成される。
[Embodiment]
Next, an embodiment of the present invention will be described. FIG. 28 is a diagram showing an example of the configuration of the counting device according to the present embodiment. In the present embodiment, a counting device 7b is used instead of the
FIG. 29 is a block diagram showing an example of the configuration of the counting
図30は本実施の形態の計数装置7bの動作を示すフローチャートである。周期測定部745は、計数期間中のMHPの周期を測定する(図30ステップS201)。すなわち、周期測定部745は、AND72の出力の立ち上がりを検出すると共に、AND72の出力の立ち下がりを検出する。そして、周期測定部745は、AND72の出力の立ち上がりから次の立ち上がりまでの時間を測定することにより、計数期間中のAND72の出力の周期(すなわち、MHPの周期)を測定する。周期測定部745は、このような測定をAND72の出力に立ち上がりエッジが発生する度に行う。あるいは、周期測定部745は、AND72の出力の立ち下がりから次の立ち下がりまでの時間を測定することにより、MHPの周期を測定してもよい。記憶部75は、周期測定部745の測定結果を記憶する。
FIG. 30 is a flowchart showing the operation of the counting device 7b of the present embodiment. The period measurement unit 745 measures the MHP period during the counting period (step S201 in FIG. 30). That is, the period measurement unit 745 detects the rising edge of the output of the AND 72 and also detects the falling edge of the output of the AND 72. Then, the period measurement unit 745 measures the period of the output of the AND 72 during the counting period (that is, the period of the MHP) by measuring the time from the rise of the output of the AND 72 to the next rise. The period measurement unit 745 performs such measurement every time a rising edge occurs in the output of the AND 72. Alternatively, the period measurement unit 745 may measure the MHP period by measuring the time from the fall of the output of the AND 72 to the next fall. The
ゲート信号GSが立ち下がり、計数期間が終了した後、度数分布作成部741bは、記憶部75に記憶された周期測定部745の測定結果から計数期間中のMHPの周期の度数分布を作成する(図30ステップS202)。
After the gate signal GS falls and the counting period ends, the frequency
続いて、代表値算出部742bは、度数分布作成部741bが作成した度数分布から、MHPの周期の代表値T0を算出する(図30ステップS203)。ここでは、MHPの周期の最頻値や中央値、あるいは平均値を代表値T0とすればよい。また、代表値算出部742bは、階級値と度数との積が最大となる階級値を代表値T0としてもよい。
Subsequently, the representative
次に、信号結合部744bは、周期測定部745の測定結果について、代表値T0の0.5倍未満の長さの周期とその直後に測定された周期とを合わせた周期を結合後の周期とし、周期を合わせた波形を1つのMHPの1周期分の波形とすることを、結合後の周期が代表値T0の0.5倍以上になるまで行う(図30ステップS204)。図31(A)〜図31(C)は信号結合部744bの動作を説明するための図であり、図31(A)はMHPの波形を模式的に示す図、図31(B)は周期測定部745の測定結果を示す図、図31(C)は信号結合部744bの処理結果を示す図である。
Next, the
周期測定部745が図31(A)に示すMHPの周期を測定すると、図31(B)に示すように周期T1,T2,T3,T4,T5,T6,T7という測定結果が得られる。このうち、周期T1,T3,T4,T6,T7は高周波ノイズ等の原因により生じたものである。この場合、周期T1,T3〜T6は代表値T0の0.5倍未満の長さであるため、第1の参考例の計数装置7においてはT3〜T7の箇所で計数結果に誤差が生じる。
When the period measurement unit 745 measures the MHP period shown in FIG. 31A, measurement results of periods T1, T2, T3, T4, T5, T6, and T7 are obtained as shown in FIG. 31B. Among these, the periods T1, T3, T4, T6, and T7 are caused by high frequency noise and the like. In this case, since the periods T1, T3 to T6 have a length less than 0.5 times the representative value T0, in the
これに対して、本実施の形態では、信号結合部744bが上記のような信号の結合処理を行うことにより、図31(C)に示すように周期T1,T2という処理結果が得られる。例えば周期T1,T2を合わせた周期が結合後の周期T1となり、T1,T2の波形が1つのMHPの1周期分の波形として結合される。ここでは、結合後の周期が代表値T0の0.5倍以上になるように結合される。同様に、図31(B)の周期T3〜T7を合わせた周期が図31(C)に示すように結合後の周期T2となり、T3〜T7の波形が1つのMHPの1周期分の波形として結合される。信号結合部744bの処理結果は、記憶部75に格納される。
On the other hand, in the present embodiment, when the
次に、度数分布作成部741bは、記憶部75に記憶された信号結合部744bの処理結果から計数期間中のMHPの周期の度数分布を作成する(図30ステップS205)。
続いて、代表値算出部742bは、度数分布作成部741bがステップS205で作成した度数分布から、MHPの周期の代表値T0を算出する(図30ステップS206)。これにより、記憶部75に格納されている代表値T0は、ステップS206で算出された最新の値に更新される。ステップS203と同様に、MHPの周期の最頻値や中央値、あるいは平均値を代表値T0としてもよいし、階級値と度数との積が最大となる階級値を代表値T0としてもよい。
Next, the frequency
Subsequently, the representative
一方、カウンタ73bは、信号結合部744bの処理後のMHPについて、MHPの数を数える(図30ステップS207)。第1の参考例のカウンタ73は、MHPの立ち上がりと立ち下がりの両方を数えたが、カウンタ73bは、MHPの立ち上がりと立ち下がりのうちどちらか一方のみを数えればよい。
On the other hand, the
最後に、補正値算出部743bは、信号結合部744bの処理結果から、代表値T0の0.5倍未満である周期の数の総和Nsと、代表値T0の(n+0.5)倍以上(n+1.5)倍未満(nは1以上nmax以下の自然数)である周期の数の総和Nwnとを求め、カウンタ73bの計数結果を次式のように補正する(図30ステップS208)。
Finally, the correction
式(9)において、Nはカウンタ73bの計数結果であるMHPの数、N’は補正後の計数結果、TmaxはMHPの周期がとり得る最大値である。
計数装置7bは、以上のような処理を第1の発振期間P1と第2の発振期間P2の各々について行う。
In Equation (9), N is the number of MHPs that are the counting result of the
The counting device 7b performs the above processing for each of the first oscillation period P1 and the second oscillation period P2.
その他の構成は、第1の参考例と同じである。本実施の形態では、第1の参考例のように半周期の代表値を用いて計数結果を補正する効果を得ることはできないが、第2の参考例で説明したように、MHPの信号強度低下と計数装置7bに入力される信号へのバーストノイズの混入とが同時に発生した場合であっても、計数誤差を少なくすることができる。 Other configurations are the same as those of the first reference example. In this embodiment, it is not possible to obtain the effect of correcting the counting result using the half-cycle representative value as in the first reference example, but as described in the second reference example, the signal strength of the MHP Even in the case where a drop and mixing of burst noise into the signal input to the counting device 7b occur at the same time, the counting error can be reduced.
なお、本実施の形態では、ステップS202において計数期間中のMHPの周期の度数分布を作成し、ステップS203において度数分布からMHPの周期の代表値T0を算出しているが、これに限るものではなく、ステップS202において度数分布を作成することなく、代表値算出部742bが、ステップS203において周期測定部745の測定結果から計数期間中のMHPの周期の平均値を代表値T0として算出してもよい。
In this embodiment, the frequency distribution of the MHP cycle during the counting period is created in step S202, and the representative value T0 of the MHP cycle is calculated from the frequency distribution in step S203. However, the present invention is not limited to this. Alternatively, the representative
また、本実施の形態において、ステップS205,S206の処理は必須の構成要件ではない。その理由は、結合前の代表値は度数分布を用いて精度良く求められているため、必ずしも再度代表値を求める必要はないからである。ステップS205,S206の処理を実行しない場合、補正値算出部743bは、ステップS203で算出された代表値T0を使用すればよい。ただし、ステップS203で算出する代表値T0の精度が低いと考えられる場合には、ステップS205,S206の処理を実行するようにしてもよい。
In the present embodiment, the processing in steps S205 and S206 is not an essential component. The reason is that the representative value before combining is obtained with high accuracy using the frequency distribution, and therefore it is not always necessary to obtain the representative value again. When the processes in steps S205 and S206 are not executed, the correction
なお、第1〜第3の参考例および本実施の形態において少なくとも計数装置7,7a,7bと演算装置8とは、例えばCPU、記憶装置およびインタフェースを備えたコンピュータとこれらのハードウェア資源を制御するプログラムによって実現することができる。このようなコンピュータを動作させるためのプログラムは、フレキシブルディスク、CD−ROM、DVD−ROM、メモリカードなどの記録媒体に記録された状態で提供される。CPUは、読み込んだプログラムを記憶装置に書き込み、このプログラムに従って第1〜第3の参考例および本実施の形態で説明した処理を実行する。
In the first to third reference examples and the present embodiment, at least the
また、第1〜第3の参考例および本実施の形態では、本発明の計数装置を振動周波数計測装置に適用した場合について説明したが、これに限るものではなく、本発明の計数装置は他の分野にも適用することができる。本発明の計数装置が有効な場合は、計数の対象となる信号の数が特定の物理量(第1〜第3の参考例および本実施の形態の場合は半導体レーザ1と物体10との距離、および物体10の変位)と線形の関係を有し、特定の物理量が一定の場合は信号が略単一周波数となる場合である。
また、信号が単一周波数でなくても、特定の物理量が計数期間と比較して十分低い周波数で、例えば1/10以下の周波数で振動している対象物の速度のように周期分布の広がりが小さい場合も略単一周波数として本発明の計数装置は有効である。
In the first to third reference examples and the present embodiment, the case where the counting device of the present invention is applied to a vibration frequency measuring device has been described. However, the present invention is not limited to this, and the counting device of the present invention is not limited to this. It can also be applied to other fields. When the counting device of the present invention is effective, the number of signals to be counted is a specific physical quantity (first to third reference examples and the distance between the
Further, even if the signal is not a single frequency, the spread of the periodic distribution such as the speed of an object oscillating at a frequency where the specific physical quantity is sufficiently lower than the counting period, for example, 1/10 or less, is possible. Is small, the counting device of the present invention is effective as a substantially single frequency.
また、第1〜第3の参考例および本実施の形態では、物理量センサの例として振動周波数計測装置を挙げて説明したが、これに限るものではなく、本発明を他の物理量センサに適用してもよい。すなわち、計数装置の計数結果から物体の張力を算出してもよいし、特許文献1に開示されているように、計数装置の計数結果から物体との距離および物体の速度を算出するようにしてもよい。物理量センサが算出する物理量が様々なことから明らかなように、上記の特定の物理量と、物理量センサが算出する物理量とは同じ場合もあるが、異なる場合もある。
In the first to third reference examples and the present embodiment, the vibration frequency measuring device is described as an example of the physical quantity sensor. However, the present invention is not limited to this, and the present invention is applied to other physical quantity sensors. May be. That is, the tension of the object may be calculated from the counting result of the counting device, or the distance from the object and the speed of the object may be calculated from the counting result of the counting device as disclosed in
本発明は、信号の数を数える計数装置や、計数装置を用いて干渉波形の数を測定し測定対象の物理量を求める干渉型の物理量センサに適用することができる。 The present invention can be applied to a counting device that counts the number of signals, and an interference-type physical quantity sensor that measures the number of interference waveforms by using the counting device to obtain a physical quantity to be measured.
1…半導体レーザ、2…フォトダイオード、3…レンズ、4…レーザドライバ、5…電流−電圧変換増幅部、6…フィルタ部、7,7a,7b…計数装置、8…演算装置、9…表示装置、10…物体、71…2値化部、72…論理積演算部、73,73a,73b…カウンタ、74,74a,74b…計数結果補正部、75…記憶部、80…記憶部、81…2値化部、82…周期測定部、83…度数分布作成部、84…基準周期算出部、85…カウンタ、86…補正部、87…周波数算出部、88…周期和算出部、740…半周期測定部、741,741a,741b…度数分布作成部、742,742a,742b…代表値算出部、743,743a,743b…補正値算出部、744,744b…信号結合部、745…周期測定部。
DESCRIPTION OF
Claims (6)
一定の計数期間における単一の入力信号の周期を信号が入力される度に測定する信号周期測定手段と、
この信号周期測定手段の測定結果から前記計数期間中の入力信号の周期の度数分布を作成する度数分布作成手段と、
この度数分布作成手段が作成した度数分布から前記入力信号の周期の分布の代表値を算出する代表値算出手段と、
前記信号周期測定手段の測定結果について、前記代表値の0.5倍未満の長さの周期とその直後に測定された周期とを合わせた周期を結合後の周期とし、周期を合わせた信号波形を1つの信号の1周期分の波形とすることを、結合後の周期が前記代表値の0.5倍以上になるまで行う信号結合手段と、
前記計数期間における前記信号結合手段の処理後の単一の信号の1周期分の波形を数える信号計数手段と、
前記信号結合手段の処理結果から、前記代表値の0.5倍未満である周期の数の総和Nsと、前記代表値の(n+0.5)倍以上(n+1.5)倍未満(nは1以上の自然数)である周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて前記信号計数手段の計数結果を補正する補正値算出手段とを備え、
前記度数分布作成手段は、さらに、前記信号結合手段の処理結果から前記計数期間中の入力信号の周期の度数分布を作成し、
前記代表値算出手段は、前記度数分布作成手段が前記信号結合手段の処理結果から作成した度数分布から、前記入力信号の周期の代表値を算出して代表値を最新の値に更新し、
前記補正値算出手段は、前記代表値算出手段が算出した最新の代表値を用いて前記信号計数手段の計数結果を補正するものであり、前記信号計数手段の計数結果をN、前記代表値をT0、前記単一の信号の周期がとり得る最大値をT max としたとき、補正後の計数結果N’を、
Signal period measuring means for measuring the period of a single input signal in a certain counting period every time a signal is input;
A frequency distribution creating means for creating a frequency distribution of the period of the input signal during the counting period from the measurement result of the signal period measuring means;
Representative value calculating means for calculating a representative value of the period distribution of the input signal from the frequency distribution created by the frequency distribution creating means;
Regarding the measurement result of the signal period measuring means, a period obtained by combining a period having a length less than 0.5 times the representative value and a period measured immediately thereafter is defined as a combined period, and a signal waveform obtained by combining the periods A signal combining means for making a waveform for one cycle of one signal until the combined cycle becomes 0.5 times or more of the representative value;
Signal counting means for counting a waveform of one cycle of a single signal after processing of the signal combining means in the counting period;
From the processing result of the signal combining means, the sum Ns of the number of periods that is less than 0.5 times the representative value, and (n + 0.5) times or more and less than (n + 1.5) times the representative value (n is 1). seeking a number of cycles is a natural number) of the total sum Nw n above, and a correction value calculating means for correcting the counting result of the signal counting means on the basis of the frequencies Ns and Nw n,
The frequency distribution creating means further creates a frequency distribution of the period of the input signal during the counting period from the processing result of the signal combining means,
The representative value calculating means calculates the representative value of the period of the input signal from the frequency distribution created by the frequency distribution creating means from the processing result of the signal combining means, and updates the representative value to the latest value.
The correction value calculating means corrects the counting result of the signal counting means using the latest representative value calculated by the representative value calculating means , and the counting result of the signal counting means is N, and the representative value is When T0 is the maximum value that can be taken by the period of the single signal, Tmax , the corrected count result N ′ is
前記代表値は、中央値、最頻値、平均値、階級値と度数との積が最大となる階級値のうちのいずれか1つであることを特徴とする計数装置。 The counting device according to claim 1 , wherein
The counting device according to claim 1, wherein the representative value is any one of a median value, a mode value, an average value, and a class value that maximizes a product of the class value and the frequency.
発振波長が連続的に単調増加する第1の発振期間と発振波長が連続的に単調減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように前記半導体レーザを動作させる発振波長変調手段と、
前記半導体レーザから放射されたレーザ光と前記測定対象からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手段と、
前記干渉波形を計数対象の単一の信号とし、この信号の1周期分の波形を、前記第1の発振期間と前記第2の発振期間の各々を計数期間として数える、請求項1または2記載の計数装置と、
この計数装置の計数結果から前記測定対象の物理量を求める演算手段とを備えることを特徴とする物理量センサ。 A semiconductor laser that emits laser light to the object to be measured;
Oscillation wavelength modulation means for operating the semiconductor laser so that at least one of a first oscillation period in which the oscillation wavelength continuously increases monotonously and a second oscillation period in which the oscillation wavelength continuously decreases monotonously exists ,
Detection means for detecting an electrical signal including an interference waveform generated by a self-coupling effect between the laser light emitted from the semiconductor laser and the return light from the measurement object;
The interference waveform as a single signal counting target, the one period of the waveform of this signal, counts each of the first oscillation interval and the second oscillation period as the counting period, according to claim 1 or 2, wherein A counting device,
A physical quantity sensor comprising: an arithmetic means for obtaining a physical quantity of the measurement object from a counting result of the counting device.
一定の計数期間における単一の入力信号の周期を信号が入力される度に測定する信号周期測定手順と、
この信号周期測定手順の測定結果から前記計数期間中の入力信号の周期の度数分布を作成する第1の度数分布作成手順と、
この第1の度数分布作成手順で作成した度数分布から前記入力信号の周期の分布の代表値を算出する第1の代表値算出手順と、
前記信号周期測定手順の測定結果について、前記代表値の0.5倍未満の長さの周期とその直後に測定された周期とを合わせた周期を結合後の周期とし、周期を合わせた信号波形を1つの信号の1周期分の波形とすることを、結合後の周期が前記代表値の0.5倍以上になるまで行う信号結合手順と、
この信号結合手順の処理結果から前記計数期間中の入力信号の周期の度数分布を作成する第2の度数分布作成手順と、
この第2の度数分布作成手順で作成した度数分布から前記入力信号の周期の分布の代表値を算出して代表値を最新の値に更新する第2の代表値算出手順と、
前記計数期間における前記信号結合手順の処理後の単一の信号の1周期分の波形を数える信号計数手順と、
前記信号結合手順の処理結果から、前記最新の代表値の0.5倍未満である周期の数の総和Nsと、前記最新の代表値の(n+0.5)倍以上(n+1.5)倍未満(nは1以上の自然数)である周期の数の総和Nwnとを求め、これらの度数NsとNwnに基づいて前記信号計数手順の計数結果を補正する補正値算出手順とを含み、
前記補正値算出手順は、前記信号計数手順の計数結果をN、前記代表値をT0、前記単一の信号の周期がとり得る最大値をT max としたとき、補正後の計数結果N’を、
A signal period measurement procedure for measuring the period of a single input signal in a certain counting period each time a signal is input;
A first frequency distribution creating procedure for creating a frequency distribution of the period of the input signal during the counting period from the measurement result of the signal cycle measuring procedure;
A first representative value calculating procedure for calculating a representative value of the distribution of the period of the input signal from the frequency distribution created in the first frequency distribution creating procedure;
Regarding the measurement result of the signal period measurement procedure, a period obtained by combining a period having a length less than 0.5 times the representative value and a period measured immediately thereafter is defined as a combined period, and a signal waveform obtained by combining the periods A signal combining procedure in which a waveform for one cycle of one signal is made until the combined cycle becomes 0.5 times or more of the representative value;
A second frequency distribution creating procedure for creating a frequency distribution of the period of the input signal during the counting period from the processing result of the signal combining procedure;
A second representative value calculation procedure for calculating a representative value of the period distribution of the input signal from the frequency distribution created in the second frequency distribution creating procedure and updating the representative value to the latest value;
A signal counting procedure for counting waveforms of one period of a single signal after processing of the signal combining procedure in the counting period;
From the processing result of the signal combining procedure, the total number Ns of the periods that are less than 0.5 times the latest representative value and (n + 0.5) times or more and less than (n + 1.5) times the latest representative value (n is a natural number of 1 or more) was determined and the number of cycles which is the sum Nw n, and a correction value calculation procedure for correcting the counting result of the signal counting procedure on the basis of the frequencies Ns and Nw n,
In the correction value calculation procedure, when the counting result of the signal counting procedure is N, the representative value is T0, and the maximum value that the period of the single signal can take is T max , the corrected counting result N ′ is ,
前記代表値は、中央値、最頻値、平均値、階級値と度数との積が最大となる階級値のうちのいずれか1つであることを特徴とする計数方法。 The counting method according to claim 4 , wherein
The counting method according to claim 1, wherein the representative value is any one of a median value, a mode value, an average value, and a class value that maximizes a product of the class value and the frequency.
前記半導体レーザから放射されたレーザ光と測定対象からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出する検出手順と、
前記干渉波形を計数対象の単一の信号とし、この信号の1周期分の波形を、前記第1の発振期間と前記第2の発振期間の各々を計数期間として数える信号抽出手順と、
この信号抽出手順の計数結果から前記測定対象の物理量を求める演算手順とを含み、
前記信号抽出手順は、請求項4または5記載の計数方法を用いることを特徴とする物理量計測方法。 An oscillation procedure for operating the semiconductor laser so that at least one of the first oscillation period in which the oscillation wavelength continuously increases monotonously and the second oscillation period in which the oscillation wavelength continuously decreases monotonously exists;
A detection procedure for detecting an electrical signal including an interference waveform caused by a self-coupling effect between laser light emitted from the semiconductor laser and return light from a measurement object;
A signal extraction procedure in which the interference waveform is a single signal to be counted, and a waveform of one period of the signal is counted as each of the first oscillation period and the second oscillation period as a counting period ;
And a calculation procedure for obtaining the physical quantity of the measurement object from the counting results of the signal extraction procedure,
It said signal extraction step, the physical quantity measuring method which comprises using a counting method 請 Motomeko 4 or 5, wherein.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015071575A JP6018662B2 (en) | 2015-03-31 | 2015-03-31 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015071575A JP6018662B2 (en) | 2015-03-31 | 2015-03-31 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014103204A Division JP5798668B2 (en) | 2014-05-19 | 2014-05-19 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015145877A JP2015145877A (en) | 2015-08-13 |
| JP6018662B2 true JP6018662B2 (en) | 2016-11-02 |
Family
ID=53890148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015071575A Expired - Fee Related JP6018662B2 (en) | 2015-03-31 | 2015-03-31 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6018662B2 (en) |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01119702A (en) * | 1987-11-04 | 1989-05-11 | Yamatake Honeywell Co Ltd | Interference type light measuring device |
| JPH03146803A (en) * | 1989-11-02 | 1991-06-21 | Kowa Co | Method and instrument for measuring distance |
| JPH04346069A (en) * | 1991-05-24 | 1992-12-01 | Nippon Telegr & Teleph Corp <Ntt> | Speed signal generating circuit |
| JPH0566560U (en) * | 1992-02-21 | 1993-09-03 | 住友電気工業株式会社 | Pulse input processing circuit and wheel speed calculation device having this circuit |
| JPH1038907A (en) * | 1996-07-25 | 1998-02-13 | Denso Corp | Period detector for pulse signal |
| US6327549B1 (en) * | 1999-10-25 | 2001-12-04 | Perkinelmer, Inc. | Differential correction method and apparatus |
| JP3546351B2 (en) * | 1999-12-22 | 2004-07-28 | 株式会社日立製作所 | Inspection device for magnetic disk or magnetic head |
| JP4087247B2 (en) * | 2000-11-06 | 2008-05-21 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | Measuring method of input device movement |
| JP4655404B2 (en) * | 2001-04-27 | 2011-03-23 | 澁谷工業株式会社 | Article inspection method |
| JP5172077B2 (en) * | 2005-05-06 | 2013-03-27 | アズビル株式会社 | Distance / speed meter and distance / speed measurement method |
| US7283214B2 (en) * | 2005-10-14 | 2007-10-16 | Microsoft Corporation | Self-mixing laser range sensor |
| JP2007121216A (en) * | 2005-10-31 | 2007-05-17 | Aisin Seiki Co Ltd | Rotation state detector |
| JP5545915B2 (en) * | 2007-01-25 | 2014-07-09 | アズビル株式会社 | Counting device, distance meter, counting method, and distance measuring method |
| EP1953567A3 (en) * | 2007-01-25 | 2010-09-22 | Yamatake Corporation | Counting device, distance meter, counting method, and distance measuring method |
| JP5530069B2 (en) * | 2007-04-03 | 2014-06-25 | アズビル株式会社 | Distance / speed meter and distance / speed measurement method |
| JP5530070B2 (en) * | 2007-06-06 | 2014-06-25 | アズビル株式会社 | Distance / speed meter and distance / speed measurement method |
| JP5545913B2 (en) * | 2007-10-03 | 2014-07-09 | アズビル株式会社 | Counting device, distance meter, counting method, and distance measuring method |
| JP5545916B2 (en) * | 2008-01-31 | 2014-07-09 | アズビル株式会社 | Physical quantity sensor and physical quantity measuring method |
| JP5081776B2 (en) * | 2008-09-22 | 2012-11-28 | アズビル株式会社 | Vibration frequency measuring device and vibration frequency measuring method |
| JP2010078560A (en) * | 2008-09-29 | 2010-04-08 | Yamatake Corp | Device and method for measuring oscillation frequency |
| JP5663148B2 (en) * | 2009-06-29 | 2015-02-04 | アズビル株式会社 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
| JP2011033525A (en) * | 2009-08-04 | 2011-02-17 | Yamatake Corp | Counter, physical quantity sensor, counting method, and physical quantity measuring method |
| JP2011058833A (en) * | 2009-09-07 | 2011-03-24 | Yamatake Corp | Counter, physical quantity sensor, method for counting, and method for measuring physical quantity |
| JP5718410B2 (en) * | 2013-06-24 | 2015-05-13 | アズビル株式会社 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
| JP5798668B2 (en) * | 2014-05-19 | 2015-10-21 | アズビル株式会社 | Counting device, physical quantity sensor, counting method and physical quantity measuring method |
-
2015
- 2015-03-31 JP JP2015071575A patent/JP6018662B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015145877A (en) | 2015-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5663148B2 (en) | Counting device, physical quantity sensor, counting method and physical quantity measuring method | |
| JP2011033525A (en) | Counter, physical quantity sensor, counting method, and physical quantity measuring method | |
| KR100945209B1 (en) | Counting Device, Distance Meter, Counting Method, And Distance Measuring Method | |
| JP5545915B2 (en) | Counting device, distance meter, counting method, and distance measuring method | |
| JP5545916B2 (en) | Physical quantity sensor and physical quantity measuring method | |
| JP5702536B2 (en) | Velocity measuring apparatus and method | |
| WO2011111181A1 (en) | Physical quantity sensor and physical quantity measuring method | |
| US8537341B2 (en) | Physical quantity sensor and physical quantity measuring method | |
| JP5548055B2 (en) | Signal determination apparatus and signal determination method | |
| JP5081776B2 (en) | Vibration frequency measuring device and vibration frequency measuring method | |
| JP5798668B2 (en) | Counting device, physical quantity sensor, counting method and physical quantity measuring method | |
| JP2010078560A (en) | Device and method for measuring oscillation frequency | |
| JP5081778B2 (en) | Vibration amplitude measuring apparatus and vibration amplitude measuring method | |
| JP6018662B2 (en) | Counting device, physical quantity sensor, counting method and physical quantity measuring method | |
| JP2010101642A (en) | Physical quantity sensor and physical quantity measurement method | |
| JP5718410B2 (en) | Counting device, physical quantity sensor, counting method and physical quantity measuring method | |
| JP5421568B2 (en) | Physical quantity sensor and physical quantity measuring method | |
| JP2011058833A (en) | Counter, physical quantity sensor, method for counting, and method for measuring physical quantity | |
| JP2012013488A (en) | Signal determination device and signal determination method | |
| JP5818485B2 (en) | Counting device and counting method | |
| JP5541774B2 (en) | Physical quantity sensor and physical quantity measuring method | |
| JP5426344B2 (en) | Object detection sensor and object detection method | |
| JP5426345B2 (en) | Vibration amplitude measuring apparatus and vibration amplitude measuring method | |
| JP5596917B2 (en) | Physical quantity sensor and physical quantity measuring method | |
| WO2011111180A1 (en) | Physical quantity sensor and physical quantity measuring method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160229 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160418 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6018662 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |